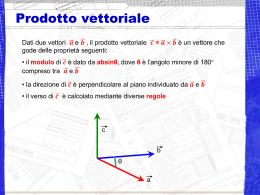
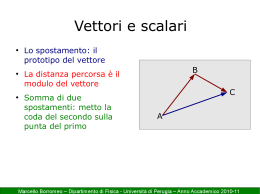
GRANDEZZE SCALARI E VETTORIALI Una grandezza scalare è definita da un numero reale con dimensioni ( massa, tempo, densità, ...) Una grandezza vettoriale è definita da un modulo (numero reale non negativo con dimensioni), da una direzione e da un verso (spostamento, velocità, forza, ...) Un vettore si indica con a, oppure con a Il suo modulo si indica con a VETTORE SPOSTAMENTO b a s Il vettore s è la somma dei due vettori a e b e si ottiene graficamente disponendo i vettori uno di seguito all’altro Il vettore spostamento congiunge il punto di partenza e quello di arrivo indipendentemente dal percorso seguito s a b SOMMA DI VETTORI a s La somma di più vettori si esegue come descritto in figura. b c s a b c La somma di vettori gode della proprietà commutativa e della proprietà associativa. DIFFERENZA DI VETTORI a b d b a La differenza di due vettori è quel vettore d tale che a b d SCOMPOSIZIONE DI UN VETTORE Un vettore può essere scomposto lungo due assegnate direzioni a ax a y a x a cos a y a sen SPOSTAMENTO E VELOCITÀ Sia s lo spostamento di un corpo fra A e B avvenuto nel tempo t Si definisce velocità vettoriale relativa a tale intervallo il vettore s s v t Il vettore v ha la stessa direzione e lo stesso verso del vettore s e modulo uguale a s/t VELOCITÀ VETTORIALE ISTANTANEA Quando l’ampiezza dell’intervallo t diventa molto piccola (tende a zero), cioè i punti A e B sono molto vicini, si ottiene la velocità istantanea che è un vettore tangente alla traiettoria orientato nel verso del moto v s ACCELERAZIONE VETTORIALE L’accelerazione vettoriale del punto P è v 2 v1 v a t t v1 v1 v2 v2 v L’accelerazione a rappresenta l’accelerazione media nell’intervallo t. Quando l’ampiezza dell’intervallo t diventa molto piccola (tende a zero), si ottiene l’accelerazione istantanea CINEMATICA Moto uniforme spazio percorso s velocità tempo impiegato t s v t s t v CINEMATICA Moto uniformemente accelerato variazione di velocità v vo accelerazi one tempo impiegato t v vo a t vo v 1 2 s vm t t vot at 2 2
Scaricare