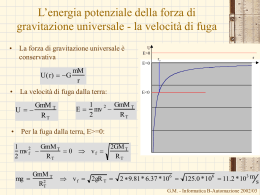
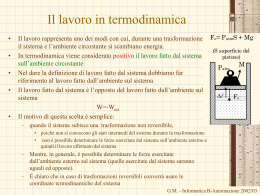
Lavoro ed energia cinetica: introduzione • Consideriamo un punto materiale che si muove di moto rettilineo sotto l’azione di una forza costante parallela alla traiettoria (per esempio moto di caduta di un grave) O x F F ma F ma x ax x x o vx ot 12 a xt 2 v x vx o a x t vx v x o ax Moto uniformemente accelerato 2vxo vx 2vxo vxo v 2x v2xo 2vxo vx v 2x v2xo x xo 2a x 2a x Eliminando il tempo: t F cos tan te m 2 v v x o 1 v vx o x x o vx o x 2 a x x ax a x v 2x v2x o a x x x o 2 2 1 1 2 2 mv x mv x o ma x x x o G.M. 2 2 - Informatica B-Automazione 2002/03 Lavoro ed energia cinetica: introduzione 1 1 2 2 mv x mv x o ma x x x o 2 2 1 1 2 mv x mv 2xo Fx xo 2 2 • Si definisce • Energia cinetica della particella 1 1 2 K mv x mv 2 2 2 • Lavoro effettuato dalla forza costante sul percorso tra xo e x W Fx xo Le dimensioni W F L 2 K M v Nel SI: Nm=kgm2s-2=J (joule) Nel SI: kgm2s-2=J (joule) G.M. - Informatica B-Automazione 2002/03 Generalizzazione della definizione di lavoro • Nello studio del moto rettilineo uniformemente accelerato abbiamo ottenuto: – La variazione dell’energia cinetica subita dal punto materiale quando si sposta tra xo e x risulta uguale al lavoro compiuto dalla forza lungo il percorso tra xo e x – Teorema delle forze vive. • Vediamo se è possibile generalizzare questo risultato al caso generale. – Se la traiettoria non è rettilinea o se la forza non è parallela allo spostamento, solo la componente tangenziale della forza è responsabile della variazione del modulo della velocità: dv Ft at dt m Occorre fare in modo, nella definizione di lavoro di una forza, che esso dipenda solo dalla componente tangenziale della forza. F Ft Fcos r G.M. - Informatica B-Automazione 2002/03 Il prodotto scalare tra vettori • Dati vettori F e r, si definisce prodotto scalare F Il risultato di un prodotto F r Fr cos scalare è uno scalare F r r F Commutativo r • Modulo del primo vettore per modulo del secondo vettore per il coseno dell’angolo compreso • Che può anche essere interpretato come – Il modulo del primo vettore per la proiezione del secondo vettore lungo il primo F r Fr cos F r cos r – Il modulo del secondo vettore per la proiezione del primo sul secondo F F cos F r rF cos r G.M. - Informatica B-Automazione 2002/03 Alcune proprietà del prodotto scalare • Vettori paralleli – Positivo Fr • Vettori antiparalleli – Negativo - Fr • Vettori ortogonali F r F r F r – Uguale a zero i i 1 j j 1 k k 1 i j i k j k 0 F Fx i Fy j Fzk r xi yj zk Il prodotto scalare di un vettore per sé stesso a a a2 F r Fx x Fy y Fzz G.M. - Informatica B-Automazione 2002/03 Generalizzazione della definizione di lavoro • Lavoro fatto da una forza costante su un percorso rettilineo F W F r Frcos r Il lavoro è una grandezza scalare • Se la forza non è costante e/o il percorso non è rettilineo, possiamo sempre – dividere il percorso in tratti così piccoli (infinitesimi) da poter considerare • il tratto rettilineo e • la forza costante su quel tratto, – Calcolare il lavoro su ciascuno dei tratti – Sommare tutti i lavori calcolati sui singoli tratti W dW F dr f F dr i, f i G.M. - Informatica B-Automazione 2002/03 Generalizzazione della definizione di lavoro • Calcolo del lavoro utilizzando le componenti cartesiane F Fx i Fy j Fz k dr dxi dyj dzk W f f F dr F dx F dy F dz x i, i, y z • Calcolo del lavoro utilizzando i moduli della forza e dello spostamento dr ds modulo di dr W f f i, i, F dr Fdscos • I lavoro della risultante n R F i WR R dr i, f i i1 f F n n n F dr F dr W f i, i i1 i1 f i, i i i1 G.M. - Informatica B-Automazione 2002/03 • Una donna tira, a velocità costante, una slitta carica di massa m= 75 kg su una superficie orizzontale. Il coefficiente di attrito dinamico tra i pattini e Applicazi la neve è md=0.10, e l’angolo f è di 42°. one • Calcolare il lavoro effettuato per spostare la slitta di 10 m. La forza applicata dalla donna è uguale alla tensione T (possiamo calcolare il lavoro della tensione T). Il lavoro effettuato dalla donna sarà: T f r W T r Trcos f Forza costante Spostamento rettilineo Bisogna calcolare il modulo di T. N Fg T fk ma x : T cos f fk ma x 0 y : N T sen f mg ma y 0 G.M. - Informatica B-Automazione 2002/03 x : T cosf md N 0 y : N T sen f mg 0 T cos f m d (mg T sen f) 0 T cos f m d senf m d mg N mg Tsenf T Applicazi one m dmg 90.8 N cos f m d sen f costante N mg T senf 75kg 9.81 m 91N sen 42 675 N s2 fk m d N 0.10 675 N 67.5 N Il lavoro effettuato dalla donna (dalla tensione): WT Trcos f md mg r cos f 90.8 N *10m * cos 42 675 J cos f m d sen f Wfk fk rcos 67.510 1 675J WN Nr cos 675 10 0 0J WFg Fg r cos 735.710 0 0J WR WFg WN WT Wfk 0 0 675 675 0J G.M. - Informatica B-Automazione 2002/03 Potenza • Data un forza esegue un lavoro W in un intervallo di tempo t • si definisce potenza media nell’intervallo t il rapporto : W Pmedia t • La Potenza sviluppata dalla forza all’istante t (potenza istantanea), si ottiene facendo il limite per t che tende a zero: dW F dr F vdt dW P dt dW F dr dr P F Fv dt dt dt Le dimensioni [P] = [ML2T-2][T-1] = [ML2T-3] Nel SI si misura in watt (W) Altre unità cavallo vapore (Cv) Kilovattora come unità di misura del lavoro 1kwattora=3.6MJ G.M. - Informatica B-Automazione 2002/03 Generalizzazione del teorema delle forze vive • Consideriamo il generico intervallo di tempo dt – La variazione dell’energia cinetica F f i 1 1 2 1 2 dK d mv m d v m dv v 2 2 2 1 1 m dv v v dv m2v dv mv adt vdt ma dr ma 2 2 dr ma dr R dWR • La relazione vale per tutti gli intervalli infinitesimi: quindi anche quando si somma su tutti gli intervalli. K W R • La variazione di energia cinetica è uguale al lavoro della risultante (la somma dei lavori fatto da tutte le forze agenti sul punto materiale) G.M. - Informatica B-Automazione 2002/03 • Un sollevatore di pesi solleva un manubrio di massa complessiva m=260kg per un dislivello di 2 m Applicazi • Determinare il lavoro fatto dalla forza peso durante il sollevamento one • Determinare il lavoro fatto dal sollevatore di peso. Fs • Se il sollevatore abbandona l’attrezzo mentre è in alto (h=2m) determinare la velocità con cui arriva sul pavimento. WP P r mgh cos 180 260kg9.81ms 2 2m 1 5101.2 J P Osserviamo che l’energia cinetica iniziale è nulla, ma anche quella finale. La variazione di energia cinetica è nulla. K K f Ki 0 Utilizzando il teorema delle forze vive: K WR WP WFs 0 WFs WP 5101.2 J Per quanto riguarda l’ultima domanda: osserviamo che il moto avviene sotto l’azione della sola forza peso. Il lavoro fatto dalla forza peso in questo caso: WP P r mgh cos 0 260kg9.81ms 2 2m1 5101.2 J K K f Ki WR WP vf 2WP m 2mgh m 2gh 6.26 m s K f K i WP 1 m v2 f 2 0J G.M. - Informatica B-Automazione 2002/03 L’energia • È una grandezza che caratterizza il punto materiale – Dipende dal suo stato (posizione, velocità, temperatura, etc) – Esistono varia forme di energia – Per es. l’energia cinetica dipende dallo stato di moto del corpo • I corpi possono scambiarsi l’energia: – Il lavoro rappresenta un modo attraverso cui i corpi si scambiano energia. – Se la risultante delle forze esterne compie un lavoro positivo (forza motrice, concorde con il moto), allora l’energia cinetica del punto materiale aumenta. • Si dice che l’ambiente esterno ha compiuto un lavoro sul punto materiale • il punto materiale ha acquisito energia cinetica dall’ambiente esterno. – Se la risultante delle forze esterne compie un lavoro negativo (forza resistente, opposta al moto), allora la sua energia cinetica diminuisce. • si dice che il punto materiale ha effettuato del lavoro sull’ambiente esterno • a spese della sua energia cinetica • L’energia cinetica rappresenta la capacità di un corpo a compiere del lavoro – Trasferire cioè il movimento ad altri corpi. • La corrente del fiume che fa muovere le macine di un mulino G.M. - Informatica B-Automazione 2002/03 L’energia cinetica e i sistemi di riferimento • Il valore dell’energia cinetica, come quella di altre grandezze dipende dal sistema di riferimento usato. • Anche le distanze percorse dipendono dal sistema di riferimento usato y' y r O • Ma anche se i valori numerici cambiano, la eguaglianza tra il lavoro fatto dalla risultante e la variazione dell’energia cinetica risulta valida in tutti i sistemi di riferimento inerziali. z z r' O' xx' z' x x' vx O' t y y' z z' v x v' x' vx O' v y v' y' v z v' z' G.M. - Informatica B-Automazione 2002/03 • Un oggetto di massa m=10 kg viene portato in un treno dalla velocità nulla alla velocità di 2 m/s percorrendo (sul treno) un tratto di 5 m. Il treno si muove con una velocità di 20 m/s rispetto al marciapiede della stazione. Verificare il teorema delle forze vive rispetto al treno e rispetto al marciapiede. 2 2 y' y v' v' 4 m f i a' 0.4 2 v' 2f v' 2i 2a' (x' f x' i ) 2(x' f x' i ) 2 5 s m R ma ' 10kg 0.4 2 4.0N t v' f v' i 2 5s s a' 0.4 1 1 1 m2 2 2 K' f K' i mv' f mv' i 10kg 4 2 20J 2 2 2 s r O z z W' Rx' 4.0N 5m 20J 1 1 1 K f Ki mv 2f mv 2i m v' f vo 2 2 2 1 1 2 K f Ki 1022 10202 420J 2 2 2 1 m v' i vo 2 Applic azione 2 z' r' O' xx' x x' vx O' t y y' z z' v x v' x' vx O' v y v' y' v z v' z' W Rx Rxf x i Rx' f vo t x' i Rx' f x' i vo t W Rx' f x' i vo t 4(5 20 5) 4 105 420J G.M. - Informatica B-Automazione 2002/03
Scaricare