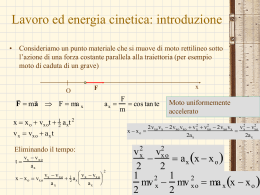
Il problema del moto • Conoscendo la legge oraria, ossia conoscendo la posizione del punto materiale ad ogni istante di tempo: – Con una prima derivazione possiamo determinare la funzione velocità – Con una seconda derivazione possiamo determinare la funzione accelerazione dv x (t) d 2 x(t) a x (t) a x (t) dt dt 2 • Il problema che ora ci poniamo è il seguente: – Se conosciamo l’accelerazione ad ogni istante di tempo nell’intervallo di osservazione del moto, conosciamo cioè la funzione a(t), – siamo in grado di determinare la legge oraria? – determinare come varia la posizione in funzione del tempo, la funzione x(t)? Si tratta di risolvere la seguente equazione: d 2x(t) a x (t) 2 dt G.M. - Informatica B-Automazione 2002/03 L’equazione differenziale d 2x(t) a x (t) 2 dt • L’equazione precedente è un’equazione differenziale – Contiene le derivate – È del secondo ordine (contiene la derivata seconda) • Cosa vuol dire risolvere una equazione differenziale come quella precedente? – Occorre ricercare tra tutte le possibili funzioni del tempo, quelle la cui derivata seconda rispetto al tempo coincide con la funzione nota dell’accelerazione a(t). G.M. - Informatica B-Automazione 2002/03 Soluzioni dell’equazione differenziale • Supponiamo di aver trovato una soluzione dell’equazione differenziale, – di aver trovato cioè una funzione x1(t) la cui derivata seconda è proprio uguale alla funzione nota a(t). d 2x1 (t) a x (t) 2 dt • La funzione x(t)=k1+k2t+x1(t), con k1 e k2 due costanti reali qualsiasi, è anch’essa soluzione della stessa equazione differenziale. dx(t) dk1 k 2 t x1 (t) dx1 (t) k2 dt dt dt d 2x(t) d dx(t) d dx1 (t) d dx1 (t) d 2 x1(t) k 2 a x (t) 2 2 dt dt dt dt dt dt dt dt G.M. - Informatica B-Automazione 2002/03 Soluzione formale dell’equazione differenziale • Cominciamo con il risolvere un’equazione più semplice: – Supporremo si conoscere la funzione velocità vx(t) – e di voler determinare la legge oraria x(t) – L’equazione differenziale in questo caso è del primo ordine. dx(t) v x (t) dt • Fissato un generico istante di tempo t* v (m/s) 24 20 – si calcola lo spostamento subito dal punto materiale tra t=0 e t* 16 • Si ripete il calcolo per tutti gli istanti di tempo 8 – si ottiene così la legge oraria 12 4 t* 0 0 2 4 6 8 10 12 14 t (s) G.M. - Informatica B-Automazione 2002/03 Soluzione formale dell’equazione differenziale • Se conoscessimo la velocità media tra t=0 e t*, lo spostamento varrebbe: x(t*) xo v mx (t * 0) vmx t * • Purtroppo conosciamo la velocità in tutti gli istanti di tempo ma non quella media • Possiamo fare delle ipotesi: – La velocità media è uguale a quella a t=0 – a quella a t*/2 v (m/s) 24 20 16 12 8 4 t* t 0 0 2 4 6 8 10 12 14 t (s) G.M. - Informatica B-Automazione 2002/03 Risoluzione formale dell’equazione differenziale • Possiamo immaginare di suddividere l’intervallo tra 0 e t* t* in n intervalli più piccoli di ampiezza Dt n • Siano • • • • • • • to = 0 t1 = to + Dt t2 = to + 2Dt … ti = to + iDt … tn = to+ nDt = t* v (m/s) gli istanti intermedi. Lo spostamento in ciascun Dt Dx i = vxm,i Dt 24 20 16 12 8 4 t* t 0 0 2 4 6 8 10 12 14 t (s) G.M. - Informatica B-Automazione 2002/03 Risoluzione formale dell’equazione differenziale • Lo spostamento complessivo invece n x(t*) xo n Dx v i i1 x m, i Dt i1 • Noi però non conosciamo la velocità media vxm,i in ciascuno degli n intervalli di tempo, – sappiamo solo che essa è compresa tra il valore minimo e quello massimo assunti dalla funzione vx(t) nell'intervallo tra ti-1 e ti • Per fare una stima dello spostamento supporremo che la velocità media nell’i-esimo intervallo coincida con la velocità all’inizio dell’intervallo stesso: n x(t*) xo n Dx v (t i i1 x i1)Dt i1 La stima dello spostamento nel grafico corrisponde all’area totale dei rettangoli di base Dt e altezza vx(ti-1). G.M. - Informatica B-Automazione 2002/03 Risoluzione formale dell’equazione differenziale • L’approssimazione vxm,i=vx(ti-1) è tanto migliore quanto più piccola è l’ampiezza degli intervalli Dt. – Infatti al diminuire di Dt diminuisce la differenza tra il valore massimo e quello minimo della velocità in Dt. • Otterremo una stima sempre più precisa dello spostamento man mano che Dt tende a zero, o, equivalentemente, man mano che n, il numero delle suddivisioni, tende all’infinito. (m/s) v (m/s) 24 24 20 20 16 16 12 12 8 8 4 4 t* 0 0 2 4 6 8 10 12 0 14 0 t (s) t* 2 G.M. - Informatica 4 6 8 B-Automazione 10 12 2002/03 14 t Risoluzione formale dell’equazione differenziale • Diremo quindi che lo spostamento tra t=0 e t* del punto materiale è uguale a: n x(t*) xo lim n v (t x i1 )Dt i1 • Questo limite si chiama integrale della funzione vx(t) tra t=0 e t, e si indica: t* x(t*) xo v x (t)dt o • Si tratta di un integrale definito, in quanto sono specificati gli estremi di integrazione (t=0 e t*) G.M. - Informatica B-Automazione 2002/03 Risoluzione formale dell’equazione differenziale n t* x(t*) xo v x (t)dt lim n o v (t x i1 )Dt i1 • L’integrale definito corrisponde all’area sotto la curva tra t=0 e t*. – Attenzione l’area deve essere presa con il segno • Positiva nei tratti in cui la funzione è positiva • Negativa nei tratti in cui la funzione è negativa v (m/s) t* x(t*) xo v x (t)dt o Calcolando l’integrale per ogni istante t* si ottiene la legge oraria x(t) x o t vx (t)dt o 24 20 16 12 8 4 t* 0 0 2 4 6 8 10 12 14 t (s) G.M. - Informatica B-Automazione 2002/03 La velocità media • Siamo ora in grado di valutare la velocità media nell’intervallo tra t=0s e t*. • Applicando la definizione: Da cui si ottiene: v m Dt x(t*) xo v x (t)dt o Dx x(t*) x o vm Dt Dt t* v x (t)dt o Dt v (m/s) t* o t* vx (t)dt L’area del rettangolo di base Dt e altezza vm ha un’ area uguale a quella delimitata dal grafico della curva, l’asse delle ascisse e gli estremi dell’intervallo t=0s e t* 24 20 16 12 8 4 t* 0 0 2 4 6 8 10 12 14 t (s) G.M. - Informatica B-Automazione 2002/03 L’integrale definito t* n lim n v (t x i1 )Dt i1 v (t)dt x 0 • Elementi dell’integrale definito Limite superiore di integrazione v (m/s) 24 Il significato 20 Integrale definito 16 12 8 f(t) 4 t t+dt 0 0 2 4 6 10 12 i f(t) dt Limite inferiore di integrazione t* 8 f Variabile di integrazione Funzione Integranda 14 t (s) G.M. - Informatica B-Automazione 2002/03 Come si risolve l’integrale definito f • L’integrale è l’operazione inversa della derivata • Per calcolare l'integrale definito della funzione f(t), f(t)dt i – occorre ricercare una qualsiasi funzione della variabile di integrazione, F(t) • tale che la sua derivata, fatta rispetto alla variabile di integrazione, sia proprio uguale alla funzione integranda: dF( t ) f ( t) dt • La funzione F(t) si chiama “primitiva” della funzione f(t) • Il valore dell’integrale si ottiene calcolando la differenza tra i valori assunti dalla funzione nell’estremo superiore e nell’estremo inferiore. • In simboli: f f(t)dt F(t)i F(t f ) F(t i ) f i G.M. - Informatica B-Automazione 2002/03 Esempio • Dalla definizione di velocità sappiamo che: v x (t) dx dt dx v(t)dt • • v(t) è la velocità all’istante t dt è un intervallo di tempo infinitesimo che comincia all’istante t dx è lo spostamento infinitesimo subito dal punto nell’intervallo infinitesimo dt questa uguaglianza vale in tutti • gli infiniti intervalli infinitesimi in cui ho suddiviso l’intervallo di osservazione del moto f f L’uguaglianza continuerà a valere dx v(t)dt se sommo, membro a membro, su i i tutti gli infiniti intervalli di tempo: • variabile di integrazione x 5=3+2 • funzione integranda f(x)=1 7=5+2 • primitiva F(x)=x Totale 12=12 f • usualmente f dx x i x(t f ) x(t i ) x(t f ) x o • ti=0s i • x(0s)=xo Valutiamo f dx i G.M. - Informatica B-Automazione 2002/03 Proprietà degli integrali • L’integrale altro non è che una somma, con l’unica particolarità che è fatta su infiniti termini. • Siccome in una somma il risultato non cambia cambiando l’ordine con cui vengono sommati i vari termini, allora ne deduciamo che – l’integrale di una somma di funzioni è uguale alla somma degli integrali f f f f i i i i f(t) g(t)dt f(t)dt g(t)dt f(t)dt g(t)dt • Inoltre, così come in una somma, se tutti i termini hanno un fattore comune, questo può essere messo in evidenza, così nell’integrale, eventuali costanti che moltiplicano i vari elementi infinitesimi da sommare, possono essere portate fuori del segni di integrale. f f i i kf(t)dt k f(t)dt G.M. - Informatica B-Automazione 2002/03 Moto uniforme f f i i dx v(t)dt • Valutiamo ora il secondo membro: – È necessario specificare la funzione vx(t). – Supponiamo che vx(t) sia costante, moto uniforme, e pari a vxo x(t f ) x o tf tf v x odt 0 • • • variabile di integrazione t funzione integranda f(t)=vxo primitiva F(t)= vxot v x odt v x ot 0f vx ot f v x o0 vx ot f t 0 Si ricava x(t f ) x o vx ot f Questa relazione è valida comunque noi scegliamo l’istante tf in cui vogliamo smettere l’osservazione del moto. Si può sopprimere l’indice f Si ottiene così la legge oraria del moto uniforme: x(t) x o vx ot G.M. - Informatica B-Automazione 2002/03 Considerazioni • La legge oraria trovata è soluzione dell’equazione differenziale: x(t) x o vx ot dx v xo dt con v xo costante reale • è come ce l’aspettavamo, la posizione varia linearmente con il tempo : 1,20 • Osserviamo che per qualunque valore di xo, la funzione precedente è soluzione dell’equazione differenziale. 1,00 x (m) 0,80 – Ci sono infinito alla uno soluzioni dell’eq. diff. – Infatti l’equazione differenziale è del primo ordine. 0,60 tanq=vxo 0,40 • L’equazione differenziale non determina la costante xo, essa viene determinata dalle condizioni iniziali (nel nostro caso xo è proprio la posizione iniziale, a t=0s). • L’analisi ci dice che esiste una ed una sola soluzione dell’equazione differenziale che soddisfa anche le condizioni iniziali xo 0,20 0,00 0,00 5,00 10,00 15, – Il numero delle condizioni iniziali pari al grado dell’eq. diff. G.M. - Informatica B-Automazione 2002/03 Moto uniformemente accelerato • Consideriamo ora il caso in cui l’accelerazione sia costante (axo). • Cominciamo col determinare la velocità in funzione del tempo • Si tratta di risolvere la seguente equazione differenziale: dv x a xo dt con a x o costante reale • Nello studio del moto uniforme noi abbiamo risolto la seguente equazione dx v xo dt con v xo costante reale • Che ha esattamente la stessa struttura di quella che vogliamo risolvere ora: • Anche la soluzione avrà la stessa struttura della soluzione trovata in precedenza soluzione precedente x(t) xo v x ot soluzione attuale v x (t) vx o a x ot G.M. - Informatica B-Automazione 2002/03 Legge oraria del moto uniformemente accelerato • Abbiamo trovato come varia nel tempo la velocità nel caso in cui l’accelerazione è costante: v x (t) v xo a xo t • Per arrivare alla legge oraria dobbiamo risolvere la seguente eq. diff. dx v xo + a xo t dt con vx o e a xo costanti reali x(t) x o • Sappiamo che la soluzione di tale eq. diff. è data da: t x(t) x o (vx o a x ot)dt x o 0 t t t v 0 x odt x o vx o dt a x o tdt x o vx ot 0 0 t 0 t v (t)dt o x t a x otdt 0 1 2 t a xo 2 t 0 x o vx ot 12 a x ot 2 G.M. - Informatica B-Automazione 2002/03 La legge oraria del moto uniformemente accelerato x(t) x o vxo t 12 a xo t 2 È la soluzione della eq. diff. v x (t) v xo a xo t d 2x 2 ax o dt con a x o costante reale • Come già osservato in precedenza, la legge oraria precedente, per qualunque valore delle costanti xo e vxo è soluzione dell’eq. diff. – L’equazione differenziale non determina tali costanti: • Esse vanno determinate utilizzando le condizioni iniziali: – La posizione xo all’istante iniziale t=0 – La velocità vox all’istante iniziale t=0 • L’analisi ci dice che esiste una ed una sola soluzione dell’eq. diff. che soddisfa anche al problema delle condizioni inziali. • Le due equazioni in testa alla pagina vanno interpretate come l’integrale generale dell’equazione differenziale del moto uniformemente accelerato e vanno poi adattate al problema specifico inserendo le corrette condizioni iniziali. G.M. - Informatica B-Automazione 2002/03 Grafico orario del moto uniformemente accelerato x(t) x o vxo t 12 a xo t 2 v x (t) v xo a xo t • Il grafico orario del moto uniformemente accelerato è un arco di parabola. • xo è la posizione all’istante t=0s (l’intercetta con l’asse delle ordinate). • vxo è la velocità iniziale, ossia la pendenza del grafico all’istante iniziale. • L’andamento della velocità in funzione del tempo è lineare. Grafico Orario x (m) 25 20 15 tan q v xo 10 q xo 5 0 0 1 2 3 4 t (s ) 5 G.M. - Informatica B-Automazione 2002/03 Moto uniforme ed uniformemente accelerato • Il moto uniformemente accelerato, contiene , come caso particolare il moto uniforme, quando cioè l’accelerazione axo è uguale a zero. moto uniformemente accelerato x(t) x o vxo t 12 a xo t 2 v x (t) v xo a xo t moto uniforme x(t) x o vx ot v x (t) v x o G.M. - Informatica B-Automazione 2002/03 Moto di caduta dei gravi • Galilei ha determinato che – in vicinanza della superficie terrestre, – in assenza di aria • Tutti i corpi cadono verso il basso con accelerazione g – g non dipende dalla natura dei corpi (ferro, alluminio, legno, etc) – g, all’interno di un volume limitato (il laboratorio), non dipende dalla posizione del corpo. – g, è quindi anche indipendente dal tempo (costante). – Se il volume non è limitato • g dipende dalla quota • g dipende dalla latitudine, è più grande ai poli, ed è più piccola all’equatore • Alle nostre latitudini g vale circa g=9.81 m/s2 G.M. - Informatica B-Automazione 2002/03 Moto di caduta dei gravi • Il moto di caduta dei gravi si studia considerando un sistema di riferimento con l’asse y orientato verso l’alto. • La componente lungo l’asse y dell’accelerazione di gravità è negativa (-g=-9.81m/s2). • Le leggi del moto di caduta dei gravi sono: moto di caduta dei gravi y(t) y o vy ot 12 gt v y (t) v y o gt 2 g=9.81 m/s2 • Le costanti yo e vyo vanno determinate sulla base delle condizioni iniziali G.M. - Informatica B-Automazione 2002/03 Appli cazio ne Nel momento in cui il semaforo volge al verde , un’auto parte con accelerazione costante a=2.2 m/s2. Nello stesso istante un autocarro che sopravviene alla velocità costante di 9.5 m/s sorpassa l’auto. a) A quale distanza oltre al semaforo l’auto risorpasserà il camion? b) Quale sarà la velocità dell’auto in quel momento? a) A quale distanza oltre al semaforo l’auto risorpasserà il camion? Iniziamo a contare il tempo a partire dal momento in cui il semaforo diventa verde (t=0s). Introduciamo un asse di riferimento lungo la strada rettilinea. Fissiamo l’origine nel punto in cui è ferma l’automobile in attesa del verde. Orientiamo l’asse nel verso del moto del camion e dell’automobile. Con queste scelte le condizioni iniziali sono: Auto xAo=0 m vAox=0 m/s aAox=2.2 m/s2 Camion xCo=0 m vCox=9.5 m/s aCox=0 m/s2 A C O x Le rispettive leggi orarie diventano: x A (t) 12 a A xot 2 v Ax (t) a Axo t x C (t) v Cx ot v Cx (t) v Cx o G.M. - Informatica B-Automazione 2002/03 Ci sarà il risorpasso dell’auto quando le posizioni dell’auto e del camion saranno nuovamente uguali. x A (t) xC (t) 1 2 a Ax ot 2 vCx ot Appli cazio ne Calcoliamo l’istante di tempo quando questa situazione si verifica: 1 2 a Axo t 2 vCxo t 1 2 a Axo t 2 vCxo t 0 2 1 a t 2 Axo vCxo t 0 t12 a A t vC 0 xo xo 2vC xo t1 0 t 2 a A xo t1 corrisponde all’istante in cui il camion sorpassa l’auto ferma, anche in quel caso infatti le posizioni dei due veicoli coincidevano. L’istante del risorpasso sarà t2. 2 9.5 m s t2 La velocità dell’auto in quell’istante sarà: 2.2 m 8.64s s2 v Ax (t) aAxot 2.2 ms2 8.64s 19.01ms G.M. - Informatica B-Automazione 2002/03 La posizione in cui avviene il risorpasso, la possiamo calcolare con una delle due leggi orarie: x A (t) 12 a A x ot 2x C (t) xC (t) 12 2.2 m s2 8.64 2 s2 82.1m x C (t) v C x ot x C (t) 9.5 m s 8.64s 82.1m La velocità dell’auto in quell’istante sarà: v Ax (t) aAxot 2.2 ms2 8.64s 19.01ms Appli cazio ne G.M. - Informatica B-Automazione 2002/03
Scaricare