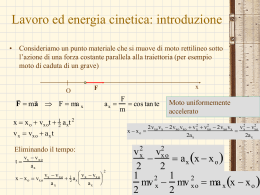
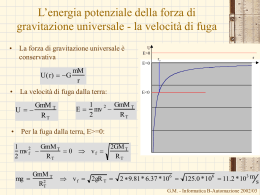
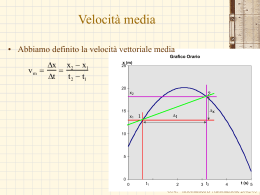
Funzione • Indica una relazione o corrispondenza tra due o più insiemi che soddisfa ad alcune proprietà. • Il dominio è l’insieme di partenza, il codominio quello di arrivo • Ogni elemento del dominio è associato con un solo elemento del codominio. • Un elemento del codominio può essere associato a più elementi del dominio della funzione Corrispondenza biunivoca dominio codominio dominio codominio G.M. - Informatica B-Automazione 2002/03 Funzione • Le funzioni più semplici sono quelle che mettono in relazione due soli insiemi – In genere noi useremo funzioni che mettono in relazioni due insiemi di numeri reali o parti di essi. – Si indica con x la variabile indipendente – L’insieme in cui può variare la variabile indipendente si chiama dominio della funzione – Si indica con y la variabile dipendente – L’insieme in cui può variare la variabile dipendente si chiama codominio della funzione – La funzione si scrive come y=f(x) in cui f rappresenta la legge di corrispondenza tra gli elementi del dominio e quelli del codominio G.M. - Informatica B-Automazione 2002/03 Esempi di funzioni • La legge di corrispondenza può essere espressa analiticamente – y(x)=4x2+6x+20 (continua) • Il dominio coincide con l’insieme dei numeri reali • il codominio: reali maggiori di 26.5 G.M. - Informatica B-Automazione 2002/03 Esempi di funzioni – y(x)=sen(x) (continua) • Il dominio coincide con l’insieme dei numeri reali • Il codominio corrisponde all’intervallo dei numeri reali compreso tra -1 e 1 G.M. - Informatica B-Automazione 2002/03 Esempi di funzioni • Oppure può essere espressa a parole – y(x) = all’intero immediatamente più piccolo di x (non continua) • Il dominio coincide con l’insieme dei numeri reali • Il codominio coincide con i numeri relativi (interi con segno) G.M. - Informatica B-Automazione 2002/03 Esempi di funzioni - l’ottovolante • Il profilo dell’ottovolante stabilisce la corrispondenza tra la coordinata orizzontale e quella verticale G.M. - Informatica B-Automazione 2002/03 Il limite 1 limite 1 n 2 n 1 2 3 4 5 ; ; ; ; ;..... 3 5 7 9 11 • • • • Data la funzione f(x) Si definisce il limite di f(x) per x che tende ad xo Se la funzione è continua e definita in xo è uguale a f(xo) Altrimenti bisogna guardare il comportamento della funzione nei pressi di xo • Esempi. G.M. - Informatica B-Automazione 2002/03 Calcolo della pendenza • La pendenza è data da Dy tan Dx Dy Pendenza Dx Rapporto incrementale Rapporto incrementale Dy Dx y(x Dx) y(x) Dx y(x) y(x+Dx) Dx x Dy x+Dx G.M. - Informatica B-Automazione 2002/03 Pendenza in un punto • Con un solo punto non posso calcolare il rapporto incrementale (Dx=0, rapporto incrementale non è definito) • Per calcolare la pendenza in un punto faccio il limite del rapporto incrementale per Dx che tende a 0. y(x Dx) y(x) Dx 0 Dx Pendenza (x) lim • Questo limite si chiama derivata della funzione y(x) in x • Corrisponde alla pendenza della retta tangente al grafico nel punto considerato. G.M. - Informatica B-Automazione 2002/03 La funzione derivata • La derivata della funzione y(x) in x la indicheremo: y(x Dx) y(x) Dy dy lim Dx 0 Dx 0 Dx Dx dx x derivata di y(x) in x lim • Il calcolo del limite del rapporto incrementale può essere anche inteso come una legge di corrispondenza – Rappresenta una funzione: la derivata della funzione y(x) – Calcolando il limite del rapporto incrementale per ogni valore di x ottengo la funzione derivata: la funzione derivata della funzione y (x) y' (x) dy dx G.M. - Informatica B-Automazione 2002/03 La derivata di una funzione • Fornisce una misura della variabilità di una funzione reale di variabile reale all’interno dell’intervallo di definizione. • Dove la derivata è positiva la funzione è crescente • Dove la derivata è negativa la funzione è decrescente • Dove la derivata è nulla la funzione è costante • Sul grafico della funzione la derivata corrisponde alla pendenza del grafico: ossia al coefficiente angolare della retta tangente al grafico nel punto considerato • Nei punti di massimo o di minimo relativo la pendenza è nulla: quindi la derivata è nulla. G.M. - Informatica B-Automazione 2002/03 Calcolo della derivata per via analitica • Se si conosce l’espressione della funzione x(t) x = xo + vot + 1/2aot2 con xo= 7.2 m, vo= 11.4 m, ao= -5.0 m • Si può calcolare il valore della derivata all’istante di tempo t1 (=per es 2s) usando la definizione: dx x(t Dt) x(t 1) lim Dt 0 1 dt t 1 Dt lim Dt0 lim Dt0 lim Dt0 lim Dt0 x o vo (t1 Dt) 12 a o (t 1 Dt)2 xo vo (t1 ) 12 a o (t1 )2 Dt x o vo t1 vo Dt 12 a o (t 1 )2 a ot 1Dt 12 a o (Dt)2 xo v o (t 1 ) 12 a o (t 1)2 x Dt 2 2 2 1 1 1 v t v Dt a (t ) a t Dt a (Dt) x v (t ) a (t ) o o 1 o 2 o 1 o 1 2 o o o 1 2 o 1 v Dt a t Dt o o 1 Dt 1 a (Dt) 2 2 o lim Dt Dt 0 vo a o t1 12 a o (Dt) vo a o t1 G.M. - Informatica B-Automazione 2002/03 Regole per il calcolo della derivata • Naturalmente, non è neppure necessario fare ogni volta il limite del rapporto incrementale, ma occorre applicare alcune regole: df(t) dk f(t) k costante 0 Funzione costante dt dt F(t) f(t) g(t) F(t) f(t)g(t) F(t) kf(t) F(t) f(t) g(t) dF(t) df(t) dg(t) dt dt dt Somma di funzioni dF(t) df(t) dg(t) g(t) f(t) dt dt dt Prodotto dF(t) dk df(t) df(t) f(t) k k dt dt dt dt df(t) dg(t) g(t) f(t) dF(t) dt dt dt g(t)2 Prodotto di una costante per una funzione Rapporto di funzioni G.M. - Informatica B-Automazione 2002/03 La derivata di alcune funzioni df(t) dt f(t) t mt m reale m m m1 dt dt f() sen df() dsen cos d d f() cos df() d cos sen d d f(x) e x df(x) de x ex dx dx f(x) log (x) df(x) dlog(x) 1 dx dx x G.M. - Informatica B-Automazione 2002/03 Derivata di una funzione di funzione • A volte ci sono funzioni che dipendono da un variabile attraverso un’altra funzione: • x(t)=Acos(wt+j) x=Acos() con (t)= wt+j A,w,jnumeri reali F(t) f(g(t)) dF(t) df(g(t)) df(g) dg df(g) dg dt dt dt dg dg dt dx(t) dAcos(wt j) d Acos() d d Acos() d dt dt dt d d dt dx(t) dAcos() d wt j Asen()w Awsen(wt j) dt d dt G.M. - Informatica B-Automazione 2002/03 Moto rettilineo del punto materiale • Punto materiale – Punto geometrico dotato di massa • Traiettoria – Il luogo dei punti via via occupati dal punto materiale • Moto rettilineo – Moto con traiettoria rettilinea • Moto di caduta di un grave, moto alternativo dei pistoni nei cilindri, moto di una automobile lungo una strada diritta, etc. G.M. - Informatica B-Automazione 2002/03 Descrizione del moto rettilineo • Studio del moto di caduta di un grave lungo la verticale • Sulla traiettoria definiamo l’asse di riferimento (origine e verso) • Usiamo un orologio per trovare la corrispondenza tra l’istante di tempo e la posizione in cui si trova il punto materiale (t=0s inizio dell’osservazione) t (s) 0,00 0,03 0,07 0,10 0,13 0,17 0,20 0,23 0,27 0,30 0,33 0,37 0,40 0,43 x (m) 1,00 0,99 0,98 0,95 0,91 0,86 0,80 0,73 0,65 0,56 0,46 0,34 0,22 0,08 1,20 1,00 x (m) 0,80 0,60 0,40 0,20 0,00 O G.M. - Informatica B-Automazione 2002/03 Grafico orario • Asse delle ascisse = variabile indipendente (il tempo). – È necessaria una scala, per es. 1cm=0,1s • Asse delle ordinate = variabile dipendente (la posizione). – Anche qui è utile una scala, per es 1 cm=0,2 m I punti rappresentano le misure, la curva è l’interpolazione. • La curva interpolante deve essere continua: • il punto materiale passa per tutte le posizioni intermedie. • La legge di corrispondenza è una funzione seria, • ad ogni istante di tempo corrisponde una sola posizione (il corpo non si può trovare in due luoghi diversi allo stesso istante di tempo). • Per lo stesso motivo la funzione è continua G.M. - Informatica B-Automazione 2002/03 Legge oraria • Il grafico orario può anche essere rappresentato mlediante una espressione matematica (legge oraria) 1 x 1,0 9,81t 2 2 x in m t in s Uso del grafico orario o della legge oraria: voglio conoscere la posizione del punto all’istante 0,2 s. Con il grafico orario Con la legge oraria 1 1 x 1,0 9,81 0,2 2 1.0 9,81 0,04 1,0 0,196 0,803 (m) 2 2 G.M. - Informatica B-Automazione 2002/03 Grafico orario di un punto materiale fermo • Il grafico orario è una retta parallela all’asse delle ascisse (dei tempi) (pendenza = 0) • Legge oraria corrispondente: x = xo (x=0,31 m) G.M. - Informatica B-Automazione 2002/03 Grafico orario di un moto a velocità costante La retta: x=mt+n n= intercetta asse ordinate m= coefficiente angolare • Il grafico orario è una retta Dx pendenza tan v Dt • Legge oraria corrispondente: x(t) x o vt G.M. - Informatica B-Automazione 2002/03 Moto di un’automobile su un tratto rettilineo • Esiste una relazione tra la pendenza del grafico orario e la velocità dell’automobile. G.M. - Informatica B-Automazione 2002/03 Spostamento e percorso effettuato • Grafico orario di un corpo lanciato verso l’alto. • Legge oraria corrispondente x = xo + vot + 1/2aot2 • xo= 7.2 m • vo= 11.4 m • ao= -5.0 m xmassimo xfinale xiniziale • Consideriamo gli istanti – Iniziale: tiniziale – finale: tfinale Spostamento= Dx =xfinale-xiniziale Percorso effettuato: è la lunghezza del tratto effettivamente percorso Nel caso della figura d=(xmassimo-x1)+(xmassimo-x2) G.M. - Informatica B-Automazione 2002/03 Il segno dello spostamento • Spostamento Dx =xfinale-xiniziale con Dt > 0 • Nel caso di un moto rettilineo non è necessario far ricorso alla rappresentazione vettoriale – Il verso del moto viene rappresentato dal segno di Dx – Se Dx >0 allora vuol dire che xfinale >xiniziale: il moto è avvenuto nella direzione positiva dell’asse delle x – Se Dx <0 allora vuol dire che xfinale <xiniziale: il moto è avvenuto nella direzione negativa dell’asse delle x xmassimo xfinale xiniziale G.M. - Informatica B-Automazione 2002/03 Velocità media • Velocità scalare percorso effettuato v sm Dt Grafico Orario x (m) 25 20 2 x2 – Sempre positiva 15 Dx Dt x1 1 • Velocità vettoriale Dx x2 x1 vm Dt t 2 t1 10 – Positiva -->x crescenti – Negativa-->x decrescenti 5 0 0 t1 1 2 3 t2 4 t (s) 5 G.M. - Informatica B-Automazione 2002/03 • Alla guida di un’automobile, dopo aver percorso una strata rettilinea per 8,4 km a 70 km/h, siete rimasti senza benzina. Avete quindi proseguito a piedi, sempre nella stessa direzione, per 2.0 km fino al prossimo distributore, dove siete arrivati dopo 30 minuti di cammino. Qual è – – – Qual è lo spostamento complessivo Il tempo complessivo impiegato La velocità media spost. complessivo 8.4km 2.0km 10.4km tempo totale Dt 1 Dt 2 d1 Dt 2 v1 8.4km 0.50h 0.62h km 70 h spost. complessivo tempo totale 10.4km 16.8 km h 0.62h vm G.M. - Informatica B-Automazione 2002/03
Scaricare