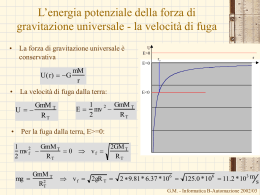
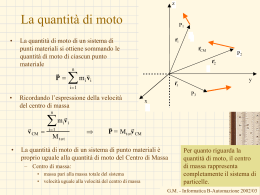
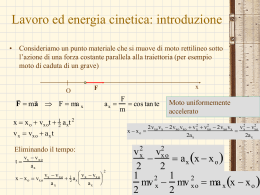
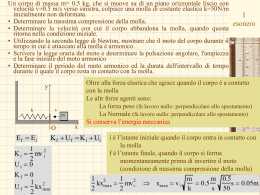
Estensione della conservazione dell’energia ai sistemi di punti materiali • Se tutte le forze interne ed esterne sono conservative • Allora si può definire una funzione energia potenziale relativa a tutto il sistema ed è uguale alla somma delle energie potenziali dei singoli punti materiali EP = å tuttele particelle EPi Ui è la somma delle energie potenziali della particella i – In altri termini la somma va estesa a tutte le forze interne ed esterne agenti sulla particella i • Poiché per ogni particella vale la conservazione dell’energia, allora essa vale anche per tutto il sistema. • Se tutte le forze sono conservative, l’energia meccanica totale del sistema rimane costante durante il moto. Em = Ek + EP = costante • Se, alcune delle forze agenti, siano esse interne od esterne, sono non conservative, allora vale la relazione lavoro-energia: DEm = Wnc • Wnc è il lavoro di tutte le forze non conservative. G.M. - Informatica B-Automazione 2002/03 L’energia potenziale della forza peso Pi = mi g • Per ciascuna particella: EPi = mi ghi n n EP = å EPi = å mi ghi i=1 i=1 n n i = 1,2, ....., n i =1, 2,....., n n EP = å EPi = å mi ghi = gå mi hi = i=1 i=1 i=1 g compare in tutti i termini della sommatoria e si può mettere in evidenza gMhCM dalla definizione di Centro di Massa, la quota h CM sarà n åmihi data da hCM = i=1 M EP = MghCM • L’energia potenziale è uguale al prodotto della massa totale del sistema di particelle per l’accelerazione di gravità per la quota del CM. G.M. - Informatica B-Automazione 2002/03 • Un bastone assimilabile ad una sbarretta omogenea di massa m0.5kg e lunghezza L=1m. Inizialmente il bastone ha un estremo a contatto con il pavimento e viene lasciato cadere partendo da una posizione pressoché verticale. Determinare il lavoro fatto dalla forza peso. y Applic azione Posizione iniziale Posizione finale WPeso = - DE PPeso Þ x WP = - ( E PfPeso - E PiPeso ) = E PiPeso - E PfPeso Scegliendo come piano orizzontale a cui attribuire energia potenziale zero il piano y=0, otteniamo Wpeso = E PiPeso - E PfPeso E PiPeso = mg L 2 Þ WPeso = E PiPeso - E PfPeso = mg L = 0.5kg ´ 9.81 sm2 ´ 0.5m = 2.45J 2 E PfPeso = 0 G.M. - Informatica B-Automazione 2002/03 • y L’elemento oscillante di un pendolo, di cui abbiamo già determinato la posizione del CM, è costituito da una sbarretta di massa ms=0.5kg e lunga 50 cm a cui è attaccata un disco di massa md=1kg di 20cm di diametro. Esso è libero di ruotare attorno ad un asse passante per l’estremo libero della sbarretta. Supponendo di lasciarlo cadere quando la sbarretta è orizzontale, determinare il lavoro fatto dalla forza peso nello spostamento dalla posizione iniziale alla posizione in cui la sbarretta è verticale Posizione iniziale Applic azione x Posizione finale Il pendolo poi prosegue oltre questa posizione (in assenza di attriti raggiunge la posizione simmetrica a quella di partenza rispetto all’asse di rotazione e poi ritorna indietro e oscilla tra la posizione iniziale e quella simmetrica rispetto all’asse di rotazione) Wpeso = - DE Ppeso Þ ( ) Wpeso = - E Pf peso - E Pipeso = E Pipeso - E Pf peso G.M. - Informatica B-Automazione 2002/03 • y L’elemento oscillante di un pendolo, di cui abbiamo già determinato la posizione del CM, è costituito da una sbarretta di massa ms=0.5kg e lunga 50 cm a cui è attaccata un disco di massa md=1kg di 20cm di diametro. Esso è libero di ruotare attorno ad un asse passante per l’estremo libero della sbarretta. Supponendo di lasciarlo cadere quando la sbarretta è orizzontale, determinare il lavoro fatto dalla forza peso nello spostamento dalla posizione iniziale alla posizione in cui la sbarretta è verticale Posizione iniziale Applic azione x Wpeso = - DE Ppeso ß ( ) Wpeso = - E Pf peso - E Pipeso = E Pipeso - E Pf peso Ricordando il calcolo della posizione del CM già fatto nella lezione precedente d1=.22m Scegliendo come piano orizzontale a cui attribuire energia potenziale zero il piano y=0, otteniamo WP = -E Pf peso E Pipeso = 0 Þ E Pf peso = - ( ms + md ) gd2 Wpeso = E Pipeso - E Pf peso = 0 - (- ( ms + md ) gd2 ) =1.5kg ´ 9.81 sm2 ´ 0.48m = 7.06J G.M. - Informatica B-Automazione 2002/03 • Una maniera alternativa per arrivare allo stesso risultato parte dall’osservazione che l’energia potenziale di un sistema di punti materiali si ottiene sommando le energie potenziali delle singole particelle: WP = -DUP Þ Applic azione WP = -(U Pf - U Pi ) = U Pi - U Pf = (U Psi + U Pdi ) - (UPsf + U Pdf ) y x U Psi = 0 U Psf L = - ms g 2 U Pdi = 0 U Pdf = - ms g(L + R) WP = UPi - U Pf U Pi = 0 U Pf = -( ms + m d ) gd2 Þ æ ö L W P = (U Psi + U Pdi ) - ( U Psf + U Pdf ) = 0 - ç-msg - md g( L + R)÷ = è ø 2 = 0.5kg ´ 9.81 sm2 ´ 0.25m + 1.0kg ´ 9.81 sm2 ´ 0.60m = = 9.81(0.5 ´ 0.25 + 1.0 ´ 0.60) J = 9.81( 0.5 ´ 0.25 + 1.0 ´ 0.60) = 9.81(0.725) J = 7.11J Che, a parte errori di arrotondamento, è uguale al valore trovato con l’altro metodo. G.M. - Informatica B-Automazione 2002/03 Momento della quantità di moto, o momento angolare, di un sistema di punti materiali • Per ciascuna particella Oi = ri ´ mi vi i =1,2, ..., n • Il momento della quantità di moto o momento angolare dell’intero sistema rispetto al polo O, è dato da: n LO = å i=1 z v1 P1 n iO = år ´ m v i v2 r1 i i i=1 rCM r2 O P2 r2 r2 y r3 P3 v3 x G.M. - Informatica B-Automazione 2002/03 Cambiamento di polo • Naturalmente possiamo calcolare il momento della quantità di moto rispetto a qualsiasi punto, non necessariamente l’origine! n L O' = å n år' ´m v = iO' i i=1 n år ´ m v = å i i i i=1 n = å i=1 v1 i=1 n LO = z i i P1 ® æ ö ´m v = r ' + OO' i i i è ø ' r1 v2 i=1 ® r' i ´ m iv i + OO' ´ n å ® ' r2 r2 O' m i vi = L O' + OO' ´ P r3' i=1 rCM r2 P2 O y P3 v3 x G.M. - Informatica B-Automazione 2002/03 Il momento della quantità di moto rispetto al centro di massa Se O’ coincide L =å L =å = å r' ´m v con il centro di n • n CM massa CM • n iCM i=1 i O' i i n iO' = i=1 i=1 år' ´m v i i=1 i i ® L O = L O' + OO' ´ P Il momento della quantità di moto valutato rispetto al centro di massa assume lo stesso valore sia se viene calcolato nel sistema Oxyz che nel sistema di riferimento del CM. n L CM = z n år' ´m v = å r' ´m v' i i i i i=1 i i = L' CM v1 i=1 n P1 n r' 1 LCM = å r'i ´ mi v i = å r'i ´ mi (v'i +v CM ) = i=1 i=1 n n i=1 i=1 v2 rCM r2 = å r'i ´ mi v'i + å r'i ´ mi v CM = æ n ö = L'CM + çå mi r'i ÷ ´ v CM = L'CM + r'CM ´ v CM = è i=1 ø ma r'CM è nullo = L'CM z' x' r' 2 r2 y r' 3 P3 P2 y' v3 x G.M. - Informatica B-Automazione 2002/03 Secondo teorema di Konig • Se O è l’origine del sistema di riferimento e O’ un secondo polo qualsiasi risulta che . ® L O = L O' + OO' ´ P • Se O’ coincide con il centro di massa. L O = L CM + rCM ´ P L O = rCM ´ Mv CM + LCM • • • Il momento della quantità di moto rispetto al polo O è uguale al momento della quantità di moto del centro di massa rispetto al polo O + il momento della quantità di moto rispetto al centro di massa (II teorema di Konig) Il CM non rappresenta del tutto il sistema Il momento della quantità di moto rispetto al centro di massa LCM possiamo calcolarlo sia usando le grandezze del sistema del centro di massa che quelle del sistema con origine in O x z z' v1 P1 r' 1 v2 rCM r2 x' r' 2 r2 y r' 3 P3 P2 y' v3 G.M. - Informatica B-Automazione 2002/03 Teorema del momento angolare II equazione cardinale della dinamica • • • Se le particelle del sistema sono in moto, variano le loro posizioni e potrebbe anche variare la loro velocità. Il momento della quantità di moto rispetto al polo O varia. Valutiamo la rapidità con cui varia. æ n ö dç ri ´ m i vi ÷ n n n è i =1 ø dL O dri dvi = = ´ miv i + ri ´ m i = ri ´ m i a i dt dt dt dt i=1 i=1 i=1 å å å dri = vi , questo dt termine è nullo in quanto ciascun termine della somma è nullo poichè prodotto vettoriale di due vettori paralleli Poichè dL O = dt n n å r ´ m a = å r ´ (F i i=1 i i i i=1 å est i ) + Fiint = mi a i = Fi est n int i = 1,2,..., n n åM + åM est iO i=1 + Fi int iO int = Mest O + MO i=1 G.M. - Informatica B-Automazione 2002/03 II equazione cardinale della dinamica dei sistemi • Il momento risultante delle forze interne è nullo: MOint = .... + ri ´ fij +.... + rj ´ f ji +.... = ..... + ri ´ fij +.... - rj ´ fij +.... = .... + ( ri - rj ) ´ fij +.... = 0 f ji =-fij =0 perchè fij é parallela a ri -rj =rij • Pertanto la variazione del momento della quantità di moto di un sistema di punti è uguale al momento risultante delle sole forze esterne i fij rij ri dL O est = MO dt fji j rj O • Mentre nel caso del punto materiale questa equazione è equivalente alla II legge della dinamica • Nel caso dei sistemi di punti, la I e la II equazione cardinale, sono indipendenti e quindi forniscono informazioni complementari. • • • • O = origine del sist. Rif O = punto fisso O = CM (SRI o SCM) O punto mobile ma con velocitàB-Automazione parallela a2002/03 vCM G.M. - Informatica Possibile uso della seconda equazione cardinale • Si consideri una carrucola il cui asse è ancorato al soffitto, su cui è avvolta una corda. • Applichiamo all’estremo libero della corda una forza F. • La prima equazione cardinale della dinamica non ci da alcuna informazione sul moto della carrucola, ci permette solo di determinare l’intensità della reazione vincolare. P + F + Rv = Ma CM = 0 Rv CM F P Rv = - P - F • La seconda equazione cardinale della dinamica dei sistemi non è banalmente soddisfatta dL CM est = M CM = r ´ F ¹ 0 dt • Questa equazione ci può dare informazioni sul moto di rotazione della carrucola attorno all’asse passante per il centro di massa. G.M. - Informatica B-Automazione 2002/03
Scaricare