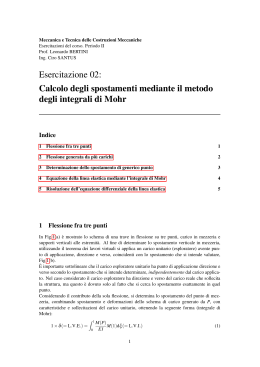
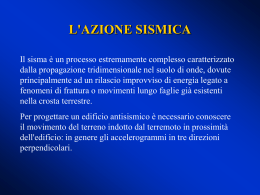
RISPOSTA ALL'ECCITAZIONE NON PERIODICA NEL DOMINIO DEL TEMPO Un carico generico può essere considerato come una successione di impulsi di durata molto breve. Consideriamo di questi F carico impulsi quello che si genera al tempo di durata d ; l’effetto di questo impulso F( infinitesimo al tempo t d (successivo a ) si ottiene t dalla risposta al carico impulsivo: x risposta t' F d t dx e sen D t m D dx() t=t'+ t Questa è la porzione infinitesima di risposta che proviene dall’impulso infinitesimo applicato al tempo . La risposta totale prodotta dalla completa storia di carico si può ottenere sovrapponendo gli effetti dei singoli impulsi infinitesimi che si susseguono fra il tempo 0 ed il tempo t: F t e sen D t d 0 m D xt xt t 1 m D t 0 F e t sen D t d INTEGRALE DI DUHAMEL: rappresenta la risposta di un sistema SDOF smorzato ad una generica storia di carico F(t); poiché la derivazione è basata sul principio di sovrapposizione degli effetti, essa è valida solo per sistemi lineari. RISPOSTA AL MOTO DEL SUOLO: ANALISI SISMICA ANALISI TIME-HISTORY Sistema smorzato sottoposto ad un arbitrario movimento del suolo: equazione del moto: mx xG cx kx 0 Si può porre: mx cx kx mxG F t mxG e assumere F(t) come somma di una serie di carichi impulsivi. Sostituendo nell'integrale di Duhamel: xt 1 D t 0 xG e t sen D t d (il segno - si può omettere: nell'analisi sismica non interessa il verso della risposta). Per le strutture degli edifici, ha valori bassi (dell'ordine del 5%), per cui xt 1 1 2 1 t 0 e D xG e t sen t d 1 V t La risposta in termini di velocità si può ottenere derivando la yt Ce t cos D t (vibrazioni libere del sistema sottosmorzato) e applicando lo stesso procedimento: x t xG e t cos t d V t t 0 arctg 1 2 arctg L'accelerazione assoluta si può ricavare dalla eq. del moto in termini di spostamento relativo tra massa e sostegno, mu cu ku mxs trascurando il termine legato allo smorzamento e sostituendovi l'espressione di x(t) desunta sopra: mx cx kx mxG c k x xG x x m m x xG 2x 2 x 2 x x xG xG e t sin t d V t t 0 Noto quindi il moto della struttura, è possibile calcolare le azioni interne necessarie per progettare e/o verificare una struttura. Si possono seguire due strade: • essendo noti gli spostamenti in ogni istante di tempo, si possono calcolare le rotazioni nei nodi degli elementi strutturali e, conoscendone le rigidezze, ricavare le caratteristiche della sollecitazione e gli sforzi; • nota la rigidezza, è possibile definire, ad ogni istante di tempo, una forza statica equivalente Fs kxt tale che, applicata al sistema, induca spostamenti uguali a quelli calcolati risolvendo l'equazione del moto; le azioni interne sono quindi calcolate con una analisi statica della struttura soggetta alla forza equivalente Il secondo metodo è spesso utilizzato nell'ingegneria sismica perché permette di utilizzare gli effetti del terremoto come dei carichi statici. Ricordando che x xG 2x 2 x 2 x Fs kx m2 x mx xG ma Ad ogni istante di tempo, la forza statica equivalente è pari al prodotto della massa per la pseudo-accelerazione a SPETTRI DI RISPOSTA ELASTICI Spesso, per la progettazione di strutture soggette a vibrazioni non a regime, più che l'andamento nel tempo interessa conoscere i valori massimi della risposta, in termini di spostamento, velocità o accelerazione. Lo spostamento relativo raggiunge il valore massimo in corrispondenza del max dell'integrale nell'espressione di x(t) precedente. Per cui ponendo: Sv x e t 0 t G sin t d max si ottiene il valore max dello spostamento: Sd 1 Sv xmax spostamento spettrale Sv è abbastanza vicino, anche se non esattamente uguale (è = per =0), al valore max della risposta in termini di velocità: Sv xmax pseudo-velocità spettrale S a S v x xG max pseudo-accelerazione spettrale Sd 1 2 Sa Il valore max della forza nell'organo elastico - ovvero il valore di taglio max alla base - vale: f max kS d mS d mS a 2 Con riferimento alla registrazione di una componente di accelerazione relativa ad un terremoto, si possono ricavare, per un sistema ad un grado di libertà e per ogni coppia di valori del periodo proprio e del coefficiente di smorzamento, i valori di Sa, Sv e Sd. E’ possibile rappresentare graficamente, per un dato accelerogramma, l’andamento di Sa, Sv e Sd in funzione del periodo proprio e per determinati valori del coefficiente di smorzamento. Tali diagrammi sono chiamati rispettivamente SPETTRO DI RISPOSTA della pseudo-accelerazione, pseudo-velocità, spostamento Terremoto del Friuli 1976 spettro di risposta normalizzato dello spostamento relativo 3 0% 2% spostamento relativo/x g,max 2.5 5% 2 1.5 1 0.5 0 0 0.5 1 1.5 2 2.5 3 3.5 T [s] 4 Terremoto del Friuli 1976 spettro di risposta normalizzato della pseudo-velocità relativa 8 Pseudovelocità relativa/v g,max 7 6 5 0% 2% 5% 4 3 2 1 0 0 0.5 1 1.5 2 2.5 3 3.5 T [s] si nota che da un certo valore di T in poi, la velocità rimane pressoché costante 4 Terremoto del Friuli 1976 spettro di risposta normalizzato della pseudo-accelerazione assoluta 10 Pseudoaccelerazione assoluta/a g,max 9 8 7 6 0% 2% 5% 5 4 3 2 1 0 0 0.5 1 1.5 2 2.5 3 3.5 T [s] 4 Gli spettri di risposta calcolati sulla base di un determinato accelerogramma presentano un andamento abbastanza irregolare che corrisponde ad effetti di risonanza locale, legati al contenuto in frequenza dell’accelerogramma. Queste irregolarità si attenuano passando a curve calcolate per smorzamenti via via maggiori. 10 Pseudoaccelerazione assoluta/a g,max 9 8 7 6 0% 2% 5% 5 4 3 2 1 Spettri di pseudo-accelerazione: 0 0 0.5 1 1.5 2 2.5 3 3.5 T [s] 4 • per valori di periodo prossimi a 0, strutture molto rigide, l’accelerazione assoluta tende a coincidere con l’accelerazione del suolo (al limite uguale per T=0); • le massime amplificazioni si hanno per valori del periodo abbastanza piccoli; • per strutture molto deformabili, l'accelerazione max decresce e tende a 0. Spettri di spostamento: • strutture molto rigide, periodi prossimi a 0, presentano spostamenti relativi al suolo piccoli (al limite nulli per T=0) • l’accelerazione assoluta tende a coincidere con l’accelerazione del suolo; • le massime amplificazioni si hanno per valori del periodo intermedi; • per strutture molto deformabili, lo spostamento massimo tende a quello del terreno. x x 3 spostamento relativo/x g,max spost. rel.=0 0% 2% 2.5 5% spost. ass.=0 2 1.5 1 0.5 0 0 0.5 1 1.5 2 2.5 3 3.5 T [s] 4 xG T=0 xG T= Noti il periodo proprio e il coefficiente di smorzamento di una struttura, la sua risposta massima può essere rilevata dallo spettro. Trasformazione di un problema dinamico in uno statico: dallo spettro, si può determinare la massima forza statica equivalente da applicare alla struttura per ricavarne gli effetti massimi. Fmax Fmax kSd 2 mSd mSa Fmax mS a Sa W W g S a T W g m W=mg S a/g 0,4 0,3 k S__ a g 0,2 0,1 T T T 2 m k
Scaricare