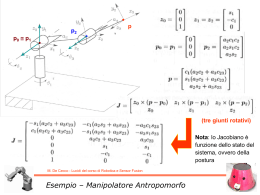
La cinematica differenziale caratterizza i legami tra le velocità dei giunti e la corrispondente velocità lineare ed angolare dell’organo terminale Tali legami sono descritti tramite una matrice denominata Jacobiano Geometrico Se la postura dell’organo terminale è espressa facendo riferimento ad una rappresentazione in forma minima (angoli di Eulero, Cardano, asse-angolo, quaternioni, …), è possibile calcolare lo Jacobiano direttamente mediante differenziazione rispetto alle variabili di giunto. Quello che si ottiene è lo Jacobiano Analitico (può essere diverso dall’altro) Lo Jacobiano è utile per: • l’analisi delle singolarità • analisi di ridondanza p n J P1 ... J Pj J n O1 ... J Oj • inversione cinematica q1 ... ... J Pn q j ... J On ... qn • determinazione legame tra forze applicate all’organo terminale e le coppie/forze ai giunti M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Cinematica differenziale Manipolatore ad n gradi di mobilità, l’equazione cinematica diretta: In cui q = [q1 … qn]T è il vettore delle variabili di giunto Legami tra le velocità dei giunti e la corrispondente velocità lineare ed angolare dell’organo terminale: In forma compatta: Jacobiano Geometrico funzione delle variabili di giunto q: M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Cinematica differenziale – Jacobiano Geometrico Si tratterà di derivare la matrice di trasformazione per cui è ora necessario ricavare come si deriva una componente fondamentale: la matrice di rotazione La matrice di rotazione in una traiettoria generica sarà funzione del tempo, per cui: R t RT t R t RT t R t RT t R t R t RT t R t R t R t RT t R t M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Derivata di una matrice di Rotazione Se definiamo la SKEW MATRIX: Ovvero la matrice S(t) è anti-simmetrica (ha gli elementi sulla diagonale nulli e la parte triangolare superiore di segno opposto rispetto alla parte inferiore) S t S T t 0 Riprendendo il risultato di prima: R t R t R t R t T Rt S T t Rt Rt S t Rt M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Derivata di una matrice di Rotazione S t S T t Consideriamo un punto p’ solidale ad un corpo sottoposto ad un moto rigido di sola rotazione La sua posizione nello spazio è pari a p(t) = R(t) p’ Dunque la derivata: Che può scriversi: Del resto sappiamo che la rotazione nel tempo di un vettore può essere espressa tramite il vettore velocità angolare (t): M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Proprietà della Skew Matrix Dunque la Skew Matrix descrive il prodotto vettoriale tra il vettore velocità angolare e la matrice di rotazione: R t t Rt S t Rt Tale risultato è di importanza fondamentale in quanto trasforma equazioni in cui è presente la derivata od il prodotto vettoriale in equazioni in cui compare semplicemente il prodotto tra matrici Tale artificio è in qualche modo analogo all’uso della trasformata di Fourier nel campo dell’analisi segnali in quanto si trasformano relazioni poco trattabili (in quel caso equazioni differenziali nel dominio del tempo) in equazioni algebriche Poiché la Skew Matrix descrive il prodotto vettoriale tra il vettore velocità angolare e la matrice di rotazione essa sarà pari a: 0 S t S t z y M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Proprietà della Skew Matrix z 0 x y x 0 Si consideri la rotazione elementare attorno all’asse z: Supponendo funzione del tempo e che: 0 S t S t z y z 0 x y x 0 M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Esempio - Skew Matrix 0 t 0 Cerchiamo adesso una proprietà notevole: Consideriamo di nuovo un punto p’ solidale ad un corpo sottoposto ad un moto rigido di sola rotazione pt Rt p' p t t Rt p' Il risultato del prodotto vettoriale tra due vettori p1 e p2 ruotato di R è pari al prodotto vettoriale dei due vettori ruotati di R: (scaturisce da semplici considerazioni geometriche di tipo vettoriale) Si noti come tale proprietà pV p1 p2 R pV R p1 R p2 denoti che il prodotto vettoriale non segue affatto le regole di composizione algebrica Rt p t Rt t Rt Rt p' S Rt t Rt Rt p' p t R T t S R t t R t R t p ' R t p ' S R t p ' S t RT t S Rt t Rt M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Proprietà della Skew Matrix In cui, eliminando l’esplicita dipendenza dal tempo: S RT S R R S R R S RT M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Proprietà della Skew Matrix (quando in apice non appare simbolo vuol dire che il vettore è espresso rispetto alla terna di base) derivando p i p i 1 Ri 1 rii11,i i 1 Ri 1 rii11,i i-1 p i p i 1 vi 1,i i 1 ri 1,i i = 0 giunto rotativo 0 giunto prismatico 0 terna di base Espressione della velocità lineare del braccio i in funzione della velocità lineare ed angolare del braccio i-1 Nota: si omette l’indicazione esplicita dell’apice “0” delle grandezze riferite alla terna di base M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Velocità di un braccio - Lineare Partendo dalla composizione delle rotazioni e derivando: Ri Ri 1 Rii 1 d/dt Ri S i Ri Ri 1 Rii 1 Ri 1 Rii 1 Ri S i 1 Ri 1 Rii 1 Ri 1 S ii1,1 i Rii 1 Dove ii1,1 i indica la velocità angolare della terna i rispetto alla i-1 espressa nella terna i-1 Ri 1 S ii11,i Rii 1 Ri 1 S ii11,i RiT1 Ri 1 Rii 1 S Ri 1 ii11,i Ri Ri S i Ri S i 1 Ri S Ri 1 ii11,i Ri M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Velocità di un braccio - Angolare Ri S i Ri S i 1 Ri S Ri 1 ii11,i Ri i Ri i 1 Ri Ri 1 ii11,i Ri i i 1 R i 1 i 1 i 1,i Ri 0 i i 1 i 1,i M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Velocità di un braccio - Angolare Espressione della velocità angolare del braccio i in funzione della velocità angolare del braccio i-1 ed angolare relativa tra braccio i ed i-1 In definitiva: p i p i 1 vi 1,i i 1 ri 1,i i i 1 i 1,i Da cui si nota come l’effetto di un giunto j si ripercuota solamente sui giunti successivi (come del resto doveva essere trattandosi di catene cinematiche aperte) Vogliamo adesso calcolare lo Jacobiano definito come: (generalizzando al caso rotativo e prismatico) p n J P1 ... J Pj J n O1 ... J Oj q1 ... ... J Pn q j ... J On ... qn M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano Mediante moltiplicazione matriciale: p n J P1 q1 ... J Pj q j ... J Pn qn J q ... J q ... J q Oj j On n n O1 1 Nota: dqj/dt è uno scalare JPj e JOj sono vettori 3x1 In cui, evidentemente: J Pj J Oj rappresenta il contributo della derivata della variabile di giunto j alla velocità lineare dell’end-effector (con tutti gli altri giunti fermi) rappresenta il contributo della derivata della variabile di giunto j alla velocità angolare dell’end-effector (con tutti gli altri giunti fermi) Il ché vuol dire che per determinare gli elementi dello Jacobiano si può applicare il principio di sovrapposizione degli effetti (del resto l’operazione di derivazione porta ad una approssimazione lineare) M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano Calcolo di J Pj : p i p i 1 vi 1,i i 1 ri 1,i Poiché l’effetto di un giunto j si ripercuote solamente sui giunti successivi: pn p j 1 v j 1, j ... vn 1,n j 1 rj 1, j ... n 1 rn 1,n pn v j 1, j ... vn 1,n j 1 rj 1, j n 1 rn 1,n Nel giunto prismatico : v j 1, j d j z j 1 q d j j Nel giunto rotoidale : j 1, j j z j 1 q j j M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano – Contributo Lineare Solo il braccio j si muove, quindi alcuni termini si annullano Calcolo di J Pj : = 0 poiché gli altri giunti prismatici sono fermi = 0 poiché non ci sono giunti rotoidali in azione pn v j 1, j ... vn 1,n j 1 rj 1, j ... n 1 rn 1,n p n d j z j 1 Nel giunto prismatico : v j 1, j d j z j 1 q d j j J Pj z j 1 Prismatico M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Giunto Prismatico – Contributo Lineare Calcolo di J Pj i i 1 i 1,i : = 0 poiché non ci sono giunti prismatici in azione Tutte le velocità angolari sono uguali in quanto si ha l’effetto del giunto rotoidale anche sugli altri giunti p n v j 1, j ...vn1,n j 1 rj 1, j ... n1 rn1,n p n j 1 rj 1, j ... j 1 rn1,n j 1 rj 1, j ... rn1,n j 1 rj 1,n p n j 1 pn p j 1 j z j 1 p n p j 1 Nel giunto rotoidale : j 1, j j z j 1 q j j J Pj z j 1 pn p j 1 M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Giunto Rotoidale – Contributo Lineare Rotoidale Calcolo di J Oj i i 1 i 1,i : = 0 poiché solo il giunto i_esimo è in azione Nel giunto prismatico : j 1, j 0 q j d j J Oj 0 Prismatico Nel giunto rotoidale : n j 1, j j 1, j j z j 1 q j j J Oj z j 1 Rotoidale M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano – Contributo Rotazionale In definitiva: z j 1 pn p j 1 Jj z j 1 Rotoidale z j 1 Jj 0 Che dipendono da: z j 1 pn p j 1 Prismatico … e quindi dalla postura del robot M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano Tali relazioni consentono il calcolo dello Jacobiano in maniera semplice e sistematica sulla base delle relazioni cinematiche dirette, in particolare: 0 0 z j 1 R 0j 1 0 R10 q1 ... R jj23 q j 2 R jj12 q j 1 0 1 1 0 0 0 0 pn An0 1...3 A10 q1 ... Ann12 qn 1 Ann 1 qn 1...3 0 0 1 1 0 0 0 0 p j 1 A0j 1 1...3 A10 q1 ... Ajj23 q j 2 Ajj12 q j 1 1...3 0 0 1 1 M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion Calcolo dello Jacobiano M. De Cecco - Lucidi del corso di Robotica e Sensor Fusion
Scaricare