getto
didattica in re
progetto
didattica in rete
Lezioni di Topografia
Esercitazioni
A. Manzino
Dipartimento di Georisorse e Territorio
Politecnico di Torino, dicembre 2000
otto editore
DISPENSE DI TOPOGRAFIA
ESERCITAZIONI
A. MANZINO
Otto Editore P.zza Vittorio Veneto 14 – 10123 Torino
www.otto.to.it
INDICE
1. CONCETTI GEOMETRICI GENERALI ............................................................. 1
1.1 UNITÀ DI MISURA ANGOLARI E CONVERSIONI.............................................................1
ESERCIZIO 1.......................................................................................................................... 4
1.2 GRANDEZZE ANGOLARI IN TOPOGRAFIA ....................................................................6
ESERCIZIO 2.......................................................................................................................... 8
1.3 LA COMPENSAZIONE EMPIRICA DI UNA POLIGONALE ................................................ 11
ESERCIZIO 3........................................................................................................................ 14
LISTATO DEL PROGRAMMA DI ELABORAZIONE STARNET ....................................... 19
1.4 LA SOLUZIONE DI UNA EQUAZIONE NON LINEARE ..................................................... 22
ESERCIZIO 4........................................................................................................................ 23
1.5 LA SOLUZIONE DI SISTEMI DI EQUAZIONI NON LINEARI ............................................. 24
1.6 LINEARIZZAZIONE DELLE EQUAZIONI DI MISURE DI UNA RETE PLANIMETRICA ............ 26
ESERCIZIO 5........................................................................................................................ 31
ESERCIZIO 6........................................................................................................................ 33
1.7 SISTEMI DI RIFERIMENTO ....................................................................................... 36
ESERCIZIO 7........................................................................................................................ 39
2. GEODESIA .............................................................................................. 45
i
ESERCIZIO 8........................................................................................................................ 45
ESERCIZIO 9........................................................................................................................ 46
ESERCIZIO 10...................................................................................................................... 47
ESERCIZIO 11...................................................................................................................... 49
ESERCIZIO 12...................................................................................................................... 50
ESERCIZIO 13...................................................................................................................... 50
ESERCIZIO 14...................................................................................................................... 52
ESERCIZIO 15...................................................................................................................... 54
ESERCIZIO 16...................................................................................................................... 55
3. CARTOGRAFIA ....................................................................................... 59
ESERCIZIO 17...................................................................................................................... 59
ESERCIZIO 18...................................................................................................................... 60
GERENZANO ....................................................................................................................... 61
OPERA................................................................................................................................ 62
MELZO ............................................................................................................................... 63
4. STATISTICA ............................................................................................ 77
ESERCIZIO 19...................................................................................................................... 77
ESERCIZIO 20...................................................................................................................... 78
ESERCIZIO 21...................................................................................................................... 79
ESERCIZIO 22...................................................................................................................... 80
ESERCIZIO 23...................................................................................................................... 82
ESERCIZIO 24...................................................................................................................... 84
ESERCIZIO 25...................................................................................................................... 86
5. IL PROGRAMMA DI COMPENSAZIONE CALGE .......................................... 93
6. MINI-SERIE DI ISTRUZIONI PER L’USO DI CALGE AL LAIB DI VERCELLI ....... 99
ii
7. GPSEDIT & TURB TOPAS: MINI-ISTRUZIONI DI AVVIO .............................. 103
8. ISTRUZIONI OPERATIVE PER L’USO DI STARNET AL LAIB ......................... 105
ESERCIZIO 26.................................................................................................................... 113
9. ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE .... 123
OUTPUT DELLA COMPENSAZIONE CALGE ............................................................................... 127
10. ESERCIZI DI TOPOGRAFIA .................................................................... 131
11. APPENDICE A ...................................................................................... 141
iii
1. CONCETTI GEOMETRICI GENERALI
Uno degli scopi della topografia è la rappresentazione, cioè la costituzione di
un elaborato cartografico che rappresenti tridimensionalmente in modo
metricamente corretto l'oggetto da esaminare (in genere il territorio), su di un
supporto cartaceo o in forma numerica, ad una scala conveniente.
Per assolvere a questo compito è necessario:
− fissare sistemi di riferimento opportuni a cui riferire le misure e la
rappresentazione
− misurare in questi sistemi la posizione di punti significativi per la
rappresentazione
Attualmente non esistono strumenti che possano assolvere alla determinazione
della posizione di punti in maniera diretta. Si procede quindi al rilievo di
grandezze funzionali della posizione, grandezze legate cioè al dato di posizione
da relazioni matematiche.
Queste grandezze sono in pratica quelle che possono essere rilevate sul
territorio e cioè:
− angoli
− distanze
− dislivelli
Verranno nel seguito trattate le procedure strumentali e teoriche che portano
alla loro determinazione, unitamente a concetti di trattamento dei dati, unità di
misura e sistemi di riferimento impiegati nelle scienze topografiche.
1.1. UNITÀ DI MISURA ANGOLARI E CONVERSIONI
Con angolo si intende una porzione di piano delimitata da due semirette:
l'ampiezza dell'angolo è rappresentata dalla rotazione intorno all'origine di una
semiretta fino a sovrapporsi alla seconda semiretta. L'ampiezza di un angolo
può essere espressa in diverse unità di misura. Particolarmente rilevanti per gli
scopi topografici risultano essere i sistemi:
− matematico
− centesimale
1
CONCETTI GEOMETRICI GENERALI
− sessagesimale
− sessadecimale
Sistema matematico
L'unità di misura angolare è il radiante [rad] (unità SI) definito come angolo
sotteso da un arco di lunghezza pari al raggio. Dalla definizione ne consegue
che l'angolo αr è espresso in radianti come rapporto:
αr = l / R
dove:
l = lunghezza dell'arco sotteso
R = raggio circonferenza
Valori notevoli:
2π rad = angolo giro
π rad = angolo piatto
π/2 rad= angolo retto
Sottomultipli:
mrad = 10-3 rad
µrad = 10-6 rad
Questo sistema viene utilizzato in matematica e nel linguaggio dei calcolatori.
Sistema centesimale
L'unità di misura angolare è il grado centesimale [gon] (unità non ammessa nel
SI) definito come:
1 gon = π / 200 rad
Valori notevoli:
400 gon = angolo giro
200 gon = angolo piatto
100 gon = angolo retto
Sottomultipli:
cgon = 10-2 gon
2
CONCETTI GEOMETRICI GENERALI
mgon = 10-3 gon
Questo sistema viene adottato nella maggior parte degli strumenti topografici e
nella fase di calcolo.
Sistema sessagesimale
L'unità di misura angolare è il grado sessagesimale [°] (unità non SI ammessa)
definito come:
1° = π / 180 rad
Valori notevoli:
360° = angolo giro
180° = angolo piatto
90° = angolo retto
Sottomultipli:
1' = 1° / 60 (un primo)
1" = 1' / 60 (un secondo)
I sottomultipli del secondo vengono espressi in forma decimale.
Non essendo decimale, è sconsigliabile l'uso di questo sistema nella condotta
dei calcoli. È impiegato tradizionalmente per esprimere le coordinate
geografiche «latitudine» e «longitudine».
Sistema sessadecimale
L'unità di misura angolare è il grado sessagesimale [°] (unità non SI ammessa).
Differisce dal precedente sistema sessagesimale in quanto i sottomultipli del
grado sono espressi in forma decimale. È utilizzato per la condotta dei calcoli
al posto di quello sessagesimale.
Conversioni angolari
Da sessagesimali a sessadecimali (GRA° PRI' SEC" → GRA°.XXXX)
GRA°.XXXX = GRA° + PRI'/60 + SEC"/3600
Da sessadecimali a sessagesimali (GRA°.XXXX → GRA° PRI' SEC")
PRI' = INTERO[(GRA°.XXXX - GRA°)*60]
SEC" = {[(GRA°.XXXX - GRA°)*60 - PRI]}*60
3
CONCETTI GEOMETRICI GENERALI
Le successive conversioni partono dal presupposto di aver già trasformato gli
angoli dal sistema sessagesimale a quello sessadecimale e possono essere
risolte impostando una semplice proporzione.
Da sessadecimali a centesimali e viceversa
α° α gon
=
180 200
Da centesimali a radianti e viceversa
α gon α rad
=
200
π
Da radianti a sessadecimali e viceversa
α rad
α°
=
π
180
In generale risulta essere:
α rad
α° α gon
=
=
π
180 200
1. Verificare le seguenti conversioni:
57° 23' 18"
sessadecimali
(57,3883°)
35°,2234
sessagesimali
(35° 13' 24,2)
25°,1321
centesimali
(27,9245 gon)
42° 27' 45"
centesimali
(47,1805 gon)
32°,2935
radianti
(0,5636279 rad)
143,2396 gon
radianti
(2,2500024 rad)
0,2345 rad
sessagesimali
(13° 26' 8,52")
0°,7413
centesimali
(0,8237 gon)
Si noti come per ottenere la stessa approssimazione dei gradi centesimali o
sessagesimali, occorra nel sistema matematico lavorare con più cifre
significative (almeno 3) rispetto agli altri sistemi.
4
CONCETTI GEOMETRICI GENERALI
Risulta infatti:
1" = 0,0003 gon = 0,0000048 rad
1' = 0,018 gon = 0,00029 rad
1° = 1,11 gon = 0,017 rad
Viceversa risulta:
1r = 57°,2958 = 3438' = 206265"
1r = 63,6620gon
5
CONCETTI GEOMETRICI GENERALI
1.2. GRANDEZZE ANGOLARI IN TOPOGRAFIA
In topografia vengono utilizzate convenzioni angolari che si differenziano da
quelle adottate in matematica, infatti lo zero si trova sull’asse Y delle ordinate,
il verso positivo è orario e quindi il I quadrante sarà compreso tra 0° e π/2, il II
quadrante sarà compreso tra π/2 e π, ecc. Si consideri un punto di origine (V) e
due semirette uscenti da questo passanti per i punti A e B. Si stabilisca
convenzionalmente quali dei due punti rappresenti il Punto avanti (PA) e quale
il Punto indietro (PI). Definiamo angolo la rotazione oraria che deve compiere
la direzione corrispondente al punto indietro per sovrapporsi a quella del
punto avanti. Ne risulta che l'angolo viene dato dalla differenza di due
direzioni angolari (θ) e precisamente quelle corrispondenti ai punti avanti e
indietro:
α = θPA - θPI
se:
(PA)= B e (PI) = A ⇒ α = AVB
viceversa se:
(PA) = A e (PI) = B ⇒ α = BVA
ˆB
AV
ˆA
BV
Fig. 1 – Notazione angolare.
Angolo di direzione
Si consideri un riferimento ortonormale R(O,X,Y) nel quale siano noti i punti P
e Q tramite le loro coordinate. Definiamo Angolo di direzione di Q rispetto a P
(ϑPQ o (PQ)), l'angolo di cui la parallela all'asse Y del riferimento passante per
P, deve ruotare in senso orario per sovrapporsi alla direzione PQ.
6
CONCETTI GEOMETRICI GENERALI
ϑ PO = arctan
XO − XP
YO − YP
Ne consegue che tra ϑPQ e il suo reciproco ϑQP sussiste la relazione:
ϑPQ = ϑQP ± π ( + se ϑQP < π) ( - se ϑQP > π)
Fig. 2 – Angolo di direzione.
Sebbene diverse calcolatrici tascabili riescano a calcolarlo direttamente, risulta
interessante (cfr. tab.1) analizzare il comportamento dell'angolo di direzione
nei vari quadranti in funzione delle coordinate dei punti P e Q. Come è noto la
maggior parte dei calcolatori esegue infatti una riduzione a valori di ϑ
compresi tra -π/2 e π/2. Per eseguire il calcolo dell’angolo di direzione occorre
PQ
capire in quale quadrante è posto il versore
.
PQ
quadrante
n°
1
2
3
4
segno di ϑ
+
+
-
segno di
(XQ - XP)
+
+
-
segno di
(YQ - YP)
+
+
valore di (PQ)
ϑ
ϑ+π
ϑ+π
ϑ + 2π
Tab. 1 – Riduzione dell'angolo di direzione ai vari quadranti.
7
CONCETTI GEOMETRICI GENERALI
Nella tabella sopra non sono però contemplati i seguenti casi particolari:
0/0
angolo indeterminato
+/0
ϑ = π/2
-/0
ϑ = 3π/2
0/+
ϑ=0
0/-
ϑ=π
2. Verificare i seguenti angoli di direzione calcolati rispetto al punto P di coordinate:
XP = 123,49 m; YP = 144,35 m
considerando i seguenti punti di coordinate:
1. X = 103,41 m; Y = 182,52 m (4° quadrante ϑ = 369,1695 gon)
2. X = 224,35 m; Y = 327,42 m (1° quadrante ϑ = 32,0578 gon)
3. X = 62,62 m; Y = 37,24 m (3° quadrante ϑ = 239,8992 gon)
4. X = 183,92 m; Y = 42,32 m (2° quadrante ϑ = 165,9586 gon)
Trasporto dell'angolo di direzione e delle coordinate lungo una spezzata
È un caso che spesso si presenta in topografia quando si misurano lunghezze di
lati di una spezzata e angoli tra loro compresi. Nello schema di fig.3, si sono
misurati angoli orari tra i lati della spezzata rappresentata nonché le lunghezze
di tali lati. Per assegnare il sistema di riferimento devono ancora essere note
per lo meno le coordinate di un punto (per esempio quello di inizio XO, YO) e
un angolo di direzione (per esempio quello del primo lato O1).
2
(21)
(12)
3
1
4
Fig.3 – Trasporto dell'angolo di direzione.
8
CONCETTI GEOMETRICI GENERALI
Per determinare le coordinate di tutti i punti è necessario trovare l'angolo di
direzione di tutti i lati della spezzata con la convenzione stabilita risulta:
(21) = (12) ± π (calcolo dell'angolo di direzione reciproco)
(23) = (21) + α - 2π (se supera 2π)
(23)= (12) + α
#
π
In generale risulta:
ϑi, i-1 = ϑi-1, i ± π (calcolo dell'angolo di direzione reciproco)
ϑi, i+1 = ϑi, i-1 + αi
Se ϑ23 eccede l'angolo giro è necessario sottrarre 2π
ϑi, i+1 = ϑ i-1,i + αi
#
π
Le coordinate dei vertici della spezzata vengono immediatamente ottenute
dalle:
X1 = XO + lO1 sen ϑO1
Y1 = YO + lO1 cos ϑO1
In generale risulta:
Xi = Xi-1 + li-1, i sen ϑi-1, i
Y1 = Yi-1+ li-1, i cos ϑi-1, i
Esempio
In una spezzata di 5 vertici con senso di percorrenza secondo la numerazione
crescente, sono state misurate le lunghezze dei lati:
l12 = 80,43 m
l23 = 69,19 m
l34 = 57,82 m
l45 = 95,42 m
e le rotazioni orarie che deve compiere il lato precedente per sovrapporsi al
successivo:
9
CONCETTI GEOMETRICI GENERALI
α2 = 272,71 gon
α3 = 143,56 gon
α4 = 301,54 gon
Il sistema di riferimento è stato scelto con origine nel punto 1 e in maniera che
il lato 12 formi un angolo con l'asse Y pari a:
ϑ12 = 47,35 gon
Determinare le coordinate di tutti i vertici.
Calcolo degli angoli di direzione:
ϑ12 = 47,35 gon
ϑ23 =120,06 gon
ϑ34 = 63,62 gon
ϑ45 =165,16 gon
Calcolo delle coordinate:
1 (0; 0)
2 (54,46; 59,19)
3 (120,18; 37,77)
4 (168,81; 69,04)
5 (218,46; -12,43)
10
CONCETTI GEOMETRICI GENERALI
1.3. LA COMPENSAZIONE EMPIRICA DI UNA POLIGONALE
La determinazione di una misura comporta la presenza (in essa) di un errore
accidentale.
Quando si sviluppa una poligonale (fig.4) si parte da un punto A di coordinate
note e si arriva ad uno B anch’esso di coordinate note, il che permette di
effettuare un controllo sulle misure effettuate e sulla propagazione degli errori.
Tutti gli errori di misura si propagano, questo fa sì che probabilmente il punto
B calcolato non coinciderà con il punto B reale, per questo motivo si limiterà il
più possibile il numero di punti della poligonale (4, 5 punti sono ottimali prima
di richiudersi su B).
Indipendentemente dal numero di lati della poligonale si possono effettuare 3
controlli, infatti, note le coordinate di A e di B si potranno calcolare le
coordinate XB, YB di B e l’angolo di direzione (B6) che potranno essere
confrontate con i valori noti di XB, YB e (B6). Lo schema visto avrà ridondanza 3.
− XB calcolata
≠
XB nota
− YB calcolata
≠
YB nota
− (B6) calcolata
≠
(B6) nota
Come conseguenza del controllo effettuato si individueranno degli Errori di
Chiusura.
− εα = (B6) nota - (B6) calcolata
− εx = XB nota - XB calcolata
− εy = YB nota - YB calcolata
Calcolati tali errori occorrerà dapprima verificare che questi siano minori di
una determinata tolleranza, successivamente si provvederà a compensarli.
La verifica sulla tolleranza è di tipo angolare e di tipo lineare:
εα < t α
ε 2 + ε2 < t l
y
x
nella quale, in mancanza di norme di capitolato si usa porre:
t α = 3s α nα
nα = numero di misure angolari
t l = 3s l nl
s α = sensibilit à angolare
nl = numero di misure lineari
s l = sensibilit à lineare (dipende dallo strumento di misura)
11
CONCETTI GEOMETRICI GENERALI
Per questo schema di rilievo è di solito sufficiente eseguire una compensazione
empirica; infatti, essendo il numero di misure in eccesso, rispetto alle
necessarie, assai esiguo, il risultato ottenuto con tale metodo è paragonabile a
quello che si ottiene con una compensazione rigorosa (molto più complessa)1.
Nella compensazione empirica occorre ridistribuire tali errori di chiusura sulle
misure. Sia 1 il punto di coordinate note, il che implica che l’angolo di
direzione (01) è privo di errore; sia α1 l’angolo misurato; avremo allora:
(12)= (01) + α1 - π
α1 essendo misurato non è libero da errori
(23) = (12) + α2 - π = (01) + α1 - π + α2 - π =
= (01) + α1 + α2 - 2π (n n + 1) = (0 1) + ∑ α − nπ
Distribuire uniformemente l’errore vorrà dire calcolare:
εα
n
ε
= α2 + α
n
ε
= αn + α
n
α corretto = α1 +
1
α corretto
2
α corretto
n
Volendo si potrà agire direttamente sugli angoli di direzione:
1
Il disegno porta l’esempio di una rete planimetrica in cui supponiamo note le coordinate del
punto 1 e la coordinata y del punto 2 (y2=0). Allora si avrà:
Misure: 8 angoli, 6 distanze
Coordinate punti incogniti:
Ridondanza:
Y
4
1
m = 14
n=5
r = 14-5 = 9
3
2
X
12
CONCETTI GEOMETRICI GENERALI
(1 2)corretto = (1 2) +
εα
n
(2 3)corretto = (2 3) + 2
εα
n
(n n + 1) corretto = (n n + 1) + n
εα
n
Successivamente occorrerà eseguire una ridistribuzione degli errori sulle
distanze in questo modo:
l1
X 1corretto = X 1calcolato + ε x
∑l
i
l1 + l2
∑ li
X 2corretto = X 2calcolato + ε x
...
n
X
corretto
n
=X
calcolato
n
∑l
∑l
i
i =1
+ εx
i
Una operazione analoga andrà eseguita sulle ordinate.
Y1corretto = Y1calcolato + ε Y
Y2corretto = Y2calcolato + ε Y
l1
∑l
i
l1 + l 2
∑ li
...
n
Y
corretto
n
=Y
calcolato
n
+ εY
∑l
∑l
i
i =1
i
13
CONCETTI GEOMETRICI GENERALI
3. Note le coordinate dei punti A, 1, 6, B e le distanze di, misurati gli angoli αi,
determinare le coordinate di tutti i punti interni.
%
$
α2
α1
α4
α3
α5
α6
Fig.4 – Poligonale aperta.
I punti noti sono:
1 ≡ (91,40; 38,90) m; A ≡ (-61,10; 89,05) m
6 ≡ (602,30; -6,20) m; B ≡ (1591,61; 633,54) m
Le distanze sono:
d1 = 50,50 m; d4 = 78,30 m
d2 = 135,40 m; d5 = 168,60 m
d3 = 110,30 m
Gli angoli misurati sono:
α1 = 142° 22’ 08”; α2 = 218° 30’ 20”
α3 = 136° 45’ 10”; α4 = 234° 35’ 50”
α5 = 157° 30’ 30”; α6 = 139° 11’ 10”
σd = ± 3 cm; σα = ± 7”
14
CONCETTI GEOMETRICI GENERALI
Calcolo degli angoli di direzione (A1) e (B6)
tg ( A1) =
x − xA
x1 − x A
+ 180° = 108°12'13' '
⇒ ( A1) = arctg 1
y1 − y A
y1 − y A
tg (6 B ) =
x − x6
x B − x6
= 57°06'40' '
⇒ (6B ) = arctg B
y B − y6
y B − y6
Calcolo dei restanti angoli di direzione
(12) = (A1)+α1-180° = 70°34’21’’
(23) = (12)+α2-180° = 109°04’41’’
(34) = (23)+α3-180° = 65°49’51’’
(45) = (34)+α4-180° = 120°25’41’’
(56) = (45)+α5-180° = 97°56’11’’
(6B) = (56)+α6-180° = 57°07’21’’
Determinazione dell’errore εα
εα=(6B)-(6B)calcolato=-0°00’41’’
t α = 3 ⋅ σ α nα = 3 ⋅ 7' ' ⋅ 6 = 0°00' 51' '
⇒ N .B. ε α < t α
Calcolo degli angoli di direzione compensati
(12) compensato = (12) c = (12) +
εα
= 70°34'14' '
nα
(23) compensato = (23) c = (23) + 2
εα
= 109°04'27' '
nα
(34) compensato = (34) c = (34) + 3
εα
= 65°49'31' '
nα
(45) compensato = (45) c = (45) + 4
εα
= 120°25'14' '
nα
(56) compensato = (56) c = (56) + 5
εα
= 97°55'37' '
nα
15
CONCETTI GEOMETRICI GENERALI
(6 B) compensato = (6 B) c = (6 B) + 6
εα
= 57°06'40' ' (6 B) calcolato
nα
Calcolo delle coordinate dei punti
x = x1 + d 1sin(12) = 139,02 m
2= 2
y 2 = y1 + d 1cos(12) = 55,70 m
x3 = x 2 + d 2 sin( 23) = 266,99 m
3=
y 3 = y 2 + d 2 cos(23) = 11,45 m
x = x 3 + d 3 sin( 34) = 367,62 m
4= 4
y 4 = y 3 + d 3 cos(34) = 56,62 m
x5 = x 4 + d 4 sin( 45) = 435,14 m
5=
y 5 = y 4 + d 4 cos(45) = 16,97 m
x 6 = x5 + d 5 sin( 56) = 602,13 m
6=
y 6 = y 5 + d 5 cos(56) = −6,28 m
Determinazione degli errori εx , εy
εx= x6-x6 calcolato= + 0,17 m
εy= y6-y6 calcolato= + 0,08 m
ε 2x + ε 2y = 0,1879 m
∑ d = 543,10 m
t d = 3 ⋅ σ d n d = 0,201
⇒ N .B.
16
ε 2x + ε 2y < t d
CONCETTI GEOMETRICI GENERALI
Calcolo delle coordinate compensate
d1
corretto
c
x
x
x
=
=
+
ε
= 139,04 m
x
2
2
2
d
∑
2=
y corretto = y c = y + ε d1 = 55,71 m
y
2
2
2
∑d
(d + d 2 ) = 267,05 m
corretto
= x 3c = x3 + ε x 1
x3
∑d
3=
y corretto = y c = y + ε (d1 + d 2 ) = 11,48 m
y
3
3
3
∑d
(d 1 + d 2 + d 3 ) 367,71 m
corretto
c
=
=
+
ε
x
x
x
=
x
4
4
4
d
∑
4=
y corretto = y c = y + ε (d 1 + d 2 + d 3 ) = 56,66 m
y
4
4
4
∑d
(d + d 2 + d 3 + d 4 ) = 435,26 m
corretto
= x 2c = x5 + ε x 1
x5
∑d
5=
y corretto = y c = y + ε (d1 + d 2 + d 3 + d 4 ) = 17,03 m
y
5
5
5
∑d
x 2corretto = x 2c = x 2 + ε x = 602,30 m
6 = corretto
= y 2c = y 2 + ε y = −6,20 m
y 2
17
CONCETTI GEOMETRICI GENERALI
La stessa poligonale può essere risolta in modo rigoroso con il metodo dei
minimi quadrati.
Riportiamo qui il risultato grafico ed il listato del programma di elaborazione.
Nel listato, che si raccomanda di riprendere dopo lo studio del metodo dei
minimi quadrati, evidenziamo con una cornice:
− le ipotesi di precisione;
− le coordinate compensate;
− gli errori di chiusura;
− gli sqm (Est e Nord) delle coordinate compensate.
B
A
4
2
1
3
5
6
Figura 4.b – La poligonale risolta con metodo rigoroso: si notino le ellissi d’errore sui
punti 2, 3, 4 e 5.
18
CONCETTI GEOMETRICI GENERALI
LISTATO DEL PROGRAMMA DI ELABORAZIONE STARNET
Project Option Settings
Run Mode
: Adjust with Error Propagation
Type of Adjustment
: 2D
Project Units
: Meters
Coordinate System
: LOCAL
Input/Output Coordinate Order
: East-North
Angle Data Station Order
: At-From-To
Convergence Limit; Max Iterations : 0.0100; 10
Instrument Standard Error Sets
Project Default Instrument
Distances (Constant):
Distances (PPM):
Angles:
Direction:
Azimuths & Bearings:
0.03000
0.00000
7.00000
7.00000
7.00000
Meters
Seconds
Seconds
Seconds
Summary of Unadjusted Input Observations
========================================
Number of Entered Stations (Meters) = 4
Fixed Stations
E
A
-61.1000
B
1591.6100
1
91.4000
6
602.3000
N Description
89.0500
633.5400
38.9000
-6.2000
Number of Angle Observations (DMS) = 6
At
1
2
3
4
5
6
From
A
1
2
3
4
5
To
2
3
4
5
6
B
Angle
StdErr
142-22-08.00
7.00
218-30-20.00
7.00
136-45-10.00
7.00
234-35-50.00
7.00
157-30-30.00
7.00
139-11-10.00
7.00
Number of Distance Observations (Meters) = 5
From
1
2
3
4
5
To
2
3
4
5
6
Distance
50.5000
135.4000
110.3000
78.3000
168.6000
StdErr
0.0300
0.0300
0.0300
0.0300
0.0300
Adjustment Statistical Summary
==============================
Convergence Iterations =
3
Number of Stations
=
8
Number of Observations = 11
Number of Unknowns
=
8
Number of Redundant Obs =
3
Observation
Angles
Distances
Count Sum Squares
of StdRes
Factor
6
8.17
2.23
5
14.02
3.21
Error
Total
11
22.18
2.72
Adjustment Failed the Chi Square Test at 5% Level
19
CONCETTI GEOMETRICI GENERALI
Adjusted Coordinates (Meters)
=============================
E
N
Description
-61.1000
89.0500
1591.6100
633.5400
91.4000
38.9000
602.3000
-6.2000
139.0923
55.7241
267.0703
11.4794
367.7663
56.6877
435.2802
17.0497
Station
A
B
1
6
2
3
4
5
Adjusted Observations and Residuals
Adjusted Angle Observations (DMS)
At
1
2
3
4
5
6
From
A
1
2
3
4
5
To
2
3
4
5
6
B
From
1
2
3
4
5
Angle
142-21-55.46
218-30-08.46
136-45-02.17
234-35-44.16
157-30-26.31
139-11-10.75
Residual StdErr StdRes
-0-00-12.54
7.00 1.8
-0-00-11.54
7.00 1.6
-0-00-07.83
7.00 1.1
-0-00-05.84
7.00 0.8
-0-00-03.69
7.00 0.5
0-00-00.75
7.00 0.1
Adjusted Distance Observations (Meters)
To
Distance
Residual StdErr StdRes
2
50.5728
0.0728 0.0300 2.4
3
135.4104
0.0104 0.0300 0.3
4
110.3787
0.0787 0.0300 2.6
5
78.2898
-0.0102 0.0300 0.3
6
168.6303
0.0303 0.0300 1.0
Adjusted Bearings (DMS) and Horizontal Distances (Meters)
(Relative Confidence of Bearing is in Seconds)
From
1
1
2
3
4
5
6
To
2
A
3
4
5
6
B
Bearing
N70-34-08.34E
N71-47-47.12W
S70-55-43.20E
N65-49-18.96E
S59-34-56.88E
S82-04-30.57E
N57-06-40.18E
Distance
Brg Dist
50.5728
160.5343
135.4104
110.3787
78.2898
168.6303
1178.1348
95% RelConfidence
PPM
40.61 0.1598 3160.5482
0.00 0.0000
0.0059
48.78 0.1671 1234.1236
51.08 0.1526 1382.8088
48.78 0.1518 1939.3118
39.39 0.1745 1034.5825
0.00 0.0000
0.0008
Traverse Closures of Unadjusted Observations
(Beginning and Ending on Adjusted Stations)
TRAVERSE 1
Error Angular = 40.70 Sec, 6 Angles, 6.78 Sec/Angle
Error Linear = 0.0771 S, 0.1736 W
Horiz Precision = 0.1899 Error in 543.1000, 1:2859, 349.72 PPM
From
1
1
2
3
4
5
6
20
To
A
2
3
4
5
6
B
Unadj Bearing Unadj Dist
N71-47-47.12W BS
N70-34-14.10E
50.5000
S70-55-32.69E
135.4000
N65-49-30.53E
110.3000
S59-34-46.25E
78.3000
S82-04-23.04E
168.6000
N57-06-40.18E FS
Error Propagation
=================
CONCETTI GEOMETRICI GENERALI
Station Coordinate Standard Deviations (Meters)
NOTE - Adjustment Failed the Chi-Square Test
Standard Deviations are Scaled by Total Error Factor
Station
E
N
A
0.00000
0.00000
B
0.00000
0.00000
1
0.00000
0.00000
6
0.00000
0.00000
2
0.06181
0.02146
3
0.08327
0.03246
4
0.07241
0.02856
5
0.07068
0.01603
Station Coordinate Error Ellipses (Meters)
NOTE - Adjustment Failed the Chi-Square Test
Error Ellipses are Scaled by Total Error Factor
Confidence Region = 95%
Station
A
B
1
6
2
3
4
5
Semi-Major Semi-Minor Azimuth of
Axis
Axis
Major Axis
0.00000
0.00000
0-00
0.00000
0.00000
0-00
0.00000
0.00000
0-00
0.00000
0.00000
0-00
0.15985
0.00983
71-08
0.20388
0.07930
91-28
0.18072
0.06035
101-57
0.17447
0.03218
97-32
21
CONCETTI GEOMETRICI GENERALI
1.4. LA SOLUZIONE DI UNA EQUAZIONE NON LINEARE
Molte volte in Topografia ci si trova ad operare con funzioni non lineari, quali
ad esempio la distanza tra due punti aventi coordinate note.
2
2
d AB = ( X B − X A ) + (YB − Y A )
Per trovare la soluzione di un'equazione non lineare conviene linearizzarla
troncando lo sviluppo di Taylor al primo membro procedendo poi in modo
iterativo.
Sia f(x)=0 l’equazione non lineare, ipotizzando di conoscere un valore
approssimato x0 della soluzione si ha:
f ( x) = f ( x 0 ) + f ' ( x 0 ) ⋅ ( x − x 0 ) + ... = 0
e, trascurando i termini non lineari, si ha:
f ( x) = 0 ⇒ f ( x0 ) + f ' ( x0 ) ⋅ ( x − x0 ) = 0
da cui:
( x − x0 ) = −
f ( x0 )
f ' ( x0 )
Calcolato (x-x0) si aggiorna x0 e si itera sino a raggiungere la convergenza, sino
cioè a quando (x- x0) è piccolo a piacere.
22
CONCETTI GEOMETRICI GENERALI
4. Determinare la soluzione della radice: 3 7 = x . Tale equazione può essere vista
3
come x − 7 = 0 . Sia x0 = 1 il punto di partenza, allora si avrà:
x3 − 7 6
= =2
3x 2
3
x1 = x 0 + 2 = 3 ⇒ x 1 = 3
∆x = −
x3 − 7
= −0,74
3x 2
x 2 = x1 − 0,74 = 2,26 ⇒ x 2 = 2,26
∆x = −
x3 − 7
= −0,296
3x 2
x3 = x 2 − 0,296 = 1,9635 ⇒ x 3 = 1,9635
∆x = −
23
CONCETTI GEOMETRICI GENERALI
1.5. LA SOLUZIONE DI SISTEMI DI EQUAZIONI NON LINEARI
Nel caso di misure topografiche (salvo il caso di reti di livellazione e pochi altri
casi) le equazioni:
f 1 ( x1 , x 2 ,..., x n ) − y 0 = 0
1
...
f ( x , x ,..., x ) − y 0 = 0
n
m
m 1 2
1
sono del tipo trascendente, mentre normalmente è possibile trovare soluzione
unica solo nel caso in cui le equazioni f siano lineari.
Si esce da questa fase di stallo facendo l’ipotesi che, in un piccolo intorno della
soluzione che si cerca, cioè nell’intorno delle stime dei parametri ( x1 , x 2 ,... x n ) ,
la funzione trascendente sia praticamente lineare (rispetto a quanto può
fluttuare in funzione della precisione delle misure y).
In questo caso possiamo linearizzare, senza sensibili errori, le funzioni f j
nell’intorno di valori approssimati ( x10 , x 20 ,... x n0 ) utilizzando lo sviluppo di
Taylor e trascurare il resto dal secondo ordine in poi (ipotizzando che R<v).
∂f 1
∂f1
∂f1
0 0 0
0
f 1 ( x1 , x 2 ,..., x n ) + ∂x δx1 + ∂x δx 2 + ... + ∂x δx n + R1 − y1 = 0
n
1
2
...
f 0 ( x 0 , x 0 ,..., x 0 ) + ∂f m δx + ∂f m δx + ... + ∂f m δx + R − y = 0
n
n
m
n
1
2
m 1 2
∂x1
∂x 2
∂x n
Trascurando dunque i resti R avremo:
∂ f1
∂ f1
∂ f1
0 0 0
0
f1 ( x1 , x 2 ,..., x n ) + ∂x δx1 + ∂x δx 2 + ... + ∂x δx n − y1 = 0
n
1
2
...
∂f m
∂f m
∂f m
0 0 0
0
f
(
x
,
x
,...,
x
)
+
δ
x
+
δ
x
+
...
+
δx n − y n = 0
m
n
1
2
1
2
∂
x
∂
x
∂
x
n
1
2
che in forma matriciale sarà:
f 10 ( x10 , x 20 ,..., x n0
..
..
f 0 ( x 0 , x 0 ,..., x 0
n
m 1 2
24
∂f
) 1
∂x1
+ ...
∂f
m
)
∂x1
∂f 1
∂x 2
∂f m
∂x 2
∂f1 δx1 y1
∂x n ... ...
⋅ ... = ... = 0
∂f m ... ...
...
∂x n δx n y n 1
...
2
CONCETTI GEOMETRICI GENERALI
Definita la matrice delle derivate parziali (matrice Jacobiana) Matrice Disegno
[A], la relazione anzi vista diverrà in notazione matriciale:
f 0 + [A ]⋅ δ x = y = 0
Infine la soluzione del sistema sarà:
δx = [A ] ⋅ f 0
−1
25
CONCETTI GEOMETRICI GENERALI
1.6. LINEARIZZAZIONE DELLE EQUAZIONI DI MISURE DI UNA RETE PLANIMETRICA
In una rete planimetrica prendiamo in considerazione quattro tipi di misure:
− distanze d ij tra due punti i e j
− direzioni azimutali t ij misurate dalla stazione i verso il punto j
− azimut ϑ ij misurati dalla stazione i sul punto j
− angoli azimutali α j ,i, k misurati sulla stazione i tra il punto indietro j ed
il punto avanti k.
Tutte queste equazioni non sono lineari nelle incognite coordinate dei punti (di
stazione ed osservati). Scriviamo dunque le equazioni generatrici di queste
misure e vediamo come si linearizzano per poter calcolare la matrice disegno
∂f
A = che serve a progettare la rete e a calcolare la soluzione ai minimi
∂x
quadrati.
DISTANZA dij
La distanza tra i punti i e j si esprime con il teorema di Pitagora:
d ij =
(x
j
− xi
) + (y
2
j
)
3
− d ij = 0
4
− yi
2
o, nella forma 1:
(x
j
− xi
) + (y
2
j
− yi
)
2
L’equazione si linearizza attorno ai quattro valori approssimati dei parametri
x0: (xi)0; (yi)0; (xj)0; (yj)0, vale a dire le derivate vanno calcolate utilizzando tali
valori approssimati.
Nelle formule che seguono i pedici zero (0) indicano questo.
x j − x i ∂f
y j − yi
∂f
;
= −
= −
d
∂x i
d ij 0 ∂yi
ij
26
0
5
CONCETTI GEOMETRICI GENERALI
x j − xi
y j − yi
∂f
∂f
;
=
=
∂x j d ij ∂y j d ij
0
0
6
il termine noto:
l = d ij −
(x
j
− xi
) + (y
2
j
)
2
− yi
0
7
AZIMUT ϑij
L'azimut è l’angolo azimutale misurato in Pi tra la direzione del nord
(geografico o cartografico a seconda dei casi) ed il punto Pj.
L’azimut tra i punti i e j si esprime, secondo la forma 1 con:
atn
x j − xi
y j − yi
− ϑij = 0
8
L’equazione si linearizza attorno ai quattro valori approssimati dei parametri
(delle coordinate). I parametri possono essere tutti incogniti o solo in parte.
y j − yi
∂f
= +
d2
∂x i
ij
x − xi
; ∂f = − j
∂y i
d2
ij
0
y j − yi
∂f
= −
d ij2
∂x j
0
∂f
x j − xi
;
= +
d ij2
0 ∂y j
9
0
10
27
CONCETTI GEOMETRICI GENERALI
il termine noto, calcolato anch’esso nei valori approssimati, vale:
x j − xi
l = ϑij − atn
y j − yi
0
11
Si può obiettare che l’equazione 8 o la 11 valgono solo nel primo quadrante.
Ciò è vero, ed il termine noto 11 va corretto di π nel II e III quadrante e di 2π
nel IV quadrante2, come mostra il grafico. Le derivate tuttavia non cambiano,
dunque le 9 e 10 sono sempre corrette.
2
N.B. Le equazioni angolari saranno espresse in seguito in radianti. 200 gon
esprime l’angolo piatto π.
28
CONCETTI GEOMETRICI GENERALI
DIREZIONI AZIMUTALI tij
Y
δi
0
tij
ϑij
Pj
Pi
X
La direzione azimutale è l’angolo azimutale misurato in Pi tra la direzione dello
zero del cerchio del teodolite ed il punto Pj.
La direzione azimutale differisce dall'azimut tra i punti i e j dell’angolo δ i detto
correzione d’orientamento.
Si esprime, secondo la forma 1 con:
atn
x j − xi
y j − yi
− (t ij + δ i ) = 0
12
L’equazione si linearizza attorno ai valori approssimati x0: ( xi , y i , x j , y j , δ i )0.
Come si vede l’equazione coinvolge cinque parametri, che possono essere tutti
od in parte incogniti.
y j − y i ∂f x j − x i
∂f
;
=
= −
2
2
y
∂
∂x i
d
d
i
0
ij
ij
0
13
∂f
= −1
∂δ i
14
y j − y i ∂f
x j − xi
∂f
;
=
=
−
∂x j d ij2 ∂y j
d ij2
0
0
15
il termine noto, calcolato anch’esso nei valori approssimati, vale:
x j − xi
l = t ij + δ i0 − atn
y −y
i 0
j
16
29
CONCETTI GEOMETRICI GENERALI
ANGOLI AZIMUTALI αijk
L’angolo azimutale misurato in Pj tra il punto indietro i ed il punto avanti k , si
ottiene come differenza tra le direzioni azimutali:
α ijk = t jk − t ji
17
(È positivo cioè se misurato in senso orario).
L’equazione 17 ha il vantaggio di essere indipendente dalla direzione dello zero
del cerchio, ma ha il noto svantaggio di essere una quantità correlata con gli
altri angoli azimutali misurati dalla stessa stazione.
Perciò (a meno che sia l’unico angolo misurabile da Pj) si evita di usare queste
equazioni generatrici e si preferisce usare le equazioni delle direzioni
azimutali.
Si esprime, secondo la forma 1 con:
atn
xk − x j
yk − y j
− atn
xi − x j
yi − y j
− α ijk = 0
18
L’equazione si linearizza attorno ai valori approssimati x0:
( xi , yi , x j , y j , x k , y k )0. Come si vede l’equazione coinvolge sei parametri, che
possono essere tutti od in parte incogniti.
yi − y j
∂f
= −
d ij2
∂xi
∂f y i − y j
=
∂x j d ij2
30
∂f xi − x j
;
=
∂y i d ij2
0
yk − y j
−
2
0 d kj
0
xk − x j
∂f
;
=
∂y
d2
j
kj
0
19
xi − x j
−
d2
ij
0
0
20
CONCETTI GEOMETRICI GENERALI
∂f xk − x j
=
∂y j d kj2
xi − x j
−
2
0 d ij
xk − x j
∂f
;
= −
∂y k
d kj2
0
0
21
il termine noto, calcolato anch’esso nei valori approssimati, vale:
xk − x j
x − xj
+ atn i
l = α ijk − atn
y −y
−
y
y
j 0
j 0
k
i
22
5. Note le coordinate dei punti 1, 2 e misurate le distanze 1P, 2P, determinare la
posizione del punto P sapendo il valore approssimato delle coordinate XP, YP.
P
1 = (1; 0)
2 = (8; 2)
d1 = 1P = 6,5 m
d2 = 2P = 7,8 m
P ≅ (2; 6)
L’equazione che lega la distanza tra i punti 1, 2, P e le rispettive coordinate è la
seguente3:
d i2 = ( x P − xi ) 2 + ( y P − yi ) 2
tale relazione può essere linearizzata mediante lo sviluppo di Taylor fermato al
primo ordine:
3
N.B. La formula della distanza deve essere linearizzata in genere non come segue ma con la
in quanto in tal modo l’equazione è lineare nella misura d ed è più consona al trattamento
automatico delle equazioni secondo il metodo dei minimi quadrati.
3,
31
CONCETTI GEOMETRICI GENERALI
δf
f = f 0 + ∆x
δx
che in forma matriciale può essere vista come:
a12 ∆x P
⋅
a 22 ∆y P
f 01 a11
2+ 1
f a
0 2
nella quale la matrice disegno è composta dai seguenti termini:
a11 =
∂f1
x − x1
= P
= 0,164
∂x P
d1
a12 =
∂f1
y − y1
= P
= 0,987
∂y P
d1
a12 =
∂f 2 x P − x2
=
= −0,832
∂x P
d2
a2 =
∂f1
y − y2
= P
= 0,555
∂y P
d2
2
d1, d2 rappresentano le distanze tra i punti 1, 2 e la posizione approssimata del
punto P:
d1 =
(xP − x1 )2 + (y P − y1 )2
d2 =
(x P − x2 )2 + (y P − y2 )2
= 6,08 m
= 7, 21 m
e f 01 , f 02 rappresentano la differenza tra la distanza calcolata e quella reale:
f 01 = d 1calcolato − d1dato = − 0,42 m
f 02 = d 2calcolato − d 2dato = −0,59 m
Lo sviluppo di Taylor in forma matriciale può essere scritto come:
( )
(∆x P ) = [A] ⋅ f 0i
−1
∆x
P 0,608
=
∆y 0,912
P
−1,082 − 0,42 0,383
⋅
=
0,180 − 0,59 − 0,489
si arriva così a determinare:
xp = 1,617 m; yp = 6,489 m
32
CONCETTI GEOMETRICI GENERALI
6. Note le coordinate dei punti A1, A2, A3, misurati gli angoli α1, α2 determinare la
posizione del punto P sapendo il valore approssimato delle coordinate XP, YP.
Y
α1
α2
X
Le coordinate dei punti noti valgono:
A1 = (-1876,56; 4262,18)
A2 = (-2814,93; 2931,65)
A3 = (-2623,68; 2139,28)
Le quantità misurate valgono:
α1 = 33,8511 gon
α2 = 21,0723 gon
I termini dellla matrice di disegno valgono:
∂f
1
a1 = ~1
∂X P
∂f
a12 = ~1
∂YP
∂f
1
a 2 = ~2
∂X P
∂f
2
a 2 = ~2
∂YP
=−
=
2
2P
X2 − XP
2
=−
=
Y2 − YP
2P
Y3 − YP
2
3P
X3 − XP
3P
2
+
−
+
−
Y1 − YP
2
1P
X1 − X P
2
1P
Y2 − YP
2
2P
X2 − XP
2P
2
33
CONCETTI GEOMETRICI GENERALI
Il valore approssimato delle coordinate è:
~
P ≡ (−4618; 3265) m
Con tali coordinate determiniamo dapprima gli angoli azimutali:
X 1-X P
= 1,221931 rad
Y1-Y P
X -X
( P 2) = arctg 2 P + π = 1,7536112 rad
Y2 -YP
X -X
( P 3) = arctg 3 P + π = 2,0846758 rad
Y3 -Y P
( P 1) = arctg
Gli angoli α1, α2 possono essere determinati per differenza tra gli angoli
azimutali:
α1 = ( P 2) - ( P 1) = 0,5316802 rad
α 2 = ( P 3) - ( P 2) = 0,3310646 rad
Otteniamo così il seguente sistema di equazioni:
X2 − XP
X1 − X P
f1 → arctg Y − Y + − arctg Y − Y − .1 = 0
P
P
2
1
X3 − X P
X2 − XP
f 2 → arctg
+ − arctg
− − .2 = 0
Y3 − YP
Y2 − YP
che linearizzato diverrà:
∂ f1
∂f1
~ ~
f1 ( X P , YP , α1 ) + ∂ ~ ∆X P + ∂ ~ ∆YP = 0
XP
YP
~ ~
∂f 2
∂f 2
f 2 ( X P , YP , α1 ) + ~ ∆X P + ~ ∆YP = 0
∂X P
∂YP
Procediamo ora al calcolo delle derivate parziali, dove i termini a denominatore
2
2
1 P , 2 P , ecc., indicano il quadrato della distanza tra i punti 1P, 2P,…
2
1 P = ( X 1 − X P ) 2 + (Y1 − YP ) 2 = 8 . 509 . 861,226 m 2
2
2 P = ( X 2 − X P ) 2 + (Y2 − YP ) 2 = 3 . 362 .183,648 m 2
2
3 P = ( X 3 − X P ) 2 + (Y3 − YP ) 2 = 5 . 244 . 557,781 m 2
34
CONCETTI GEOMETRICI GENERALI
Sostituendo i valori nelle espressioni precedenti si avrà:
a11 = 2,1631⋅10 −4 a12 = 2,1413 ⋅10 −4
a12 = 1,1549 ⋅10 − 4 a22 = −1,5601⋅10 −4
Una volta determinato il valore delle funzioni f1, f2, il sistema di equazioni
linearizzato in forma matriciale sarà:
1
f1 a1
+ 1
f 2 a2
a12 ∆X P
⋅
=0
a 22 ∆YP
− 5,158 ⋅ 10 −5 2,1631 ⋅ 10 − 4
2,1413 ⋅ 10 − 4 ∆X P
6,162 ⋅ 10 −5 + 1,1549 ⋅ 10 − 4 − 1,5601 ⋅ 10 −4 ⋅ ∆Y = 0
P
−5
∆X P 2689,83 3691,90 − 5,158 ⋅ 10
⋅
=
−5
1991
,
21
3729
,
66
Y
∆
−
6
,
162
10
⋅
P
∆X P 0,08875
=
∆YP − 0,33253
Le coordinate compensate risulteranno quindi:
P = (− 4618.089; 3265,333) m
35
CONCETTI GEOMETRICI GENERALI
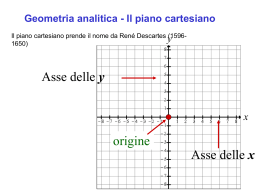
1.7. SISTEMI DI RIFERIMENTO
La rappresentazione analitica della misura dipende dal sistema di riferimento;
una sua scelta oculata può mettere in luce alcune peculiarità o particolari
proprietà della grandezza che si studia.
Sistemi di riferimento piani
I sistemi di riferimento piani si possono dividere in:
Sistema Cartesiano ortogonale
È costituito da una coppia di rette orientate ortogonali fra loro sulle quali è
fissata un'origine. Un punto è individuato nel riferimento R(O,X,Y) con le
coordinate cartesiane cioè le lunghezze con segno delle proiezioni ortogonali
OP1 e OP2. Viene spesso utilizzato nella fase di restituzione cartografica o nella
fase di calcolo più raramente queste coordinate sono oggetto di misura diretta.
Sistema Polare
È costituito da un polo e da una semiretta orientata con origine nel polo, sulla
quale è fissata un'unità di misura. Un punto P è individuato in un riferimento
R(O,ρ,ϑ) tramite la distanza ρ (lunghezza del tratto OP) e l'angolo di direzione
ϑ. Per come sono costruiti alcuni strumenti topografici, viene spesso usato
come naturale riferimento nelle operazioni di misura.
0
Fig.5 – Sistemi di riferimento.
Il passaggio tra i due sistemi si effettua mediante semplici relazioni
trigonometriche e geometriche.
36
CONCETTI GEOMETRICI GENERALI
Da Polare a Cartesiano
XP = ρ sen ϑ
YP = ρ cos ϑ
Da cartesiano a Polare
ρ=
X P2 + YP2
ϑ = arctan
XP
YP
Le operazioni di misura e quelle di calcolo e restituzione dell'elaborato
cartografico normalmente non sono eseguite negli stessi sistemi di riferimento,
occorre quindi eseguire le trasformazioni dirette e inverse tra questi. I problemi
della trasformazione tra sistemi nascono anche in quanto molto spesso è
necessario riferire l'elaborato, rappresentato in un riferimento puramente locale,
in un sistema globale (quale ad esempio il sistema di coordinate nazionale).
Esaminiamo allora alcuni problemi geometrici di trasformazione, rimandando
ai capitoli successivi le trasformazioni che fanno uso di sistemi geografici e
cartografici.
Si analizzano in particolare i seguenti casi:
− rototraslazione senza variazione di scala (trasformazione congruente)
− rototraslazione con variazione di scala isotropa (trasformazione affine
particolare)
Rototraslazione senza variazione di scala
Supponiamo di voler eseguire la trasformazione da un sistema locale (O, X, Y)
ad uno globale (O, E, N) e che gli assi di detti sistemi siano tra loro ruotati e
traslati. La trasformazione si può effettuare noti 3 parametri: la rotazione α e le
due traslazioni (E0, N0) dell'origine del sistema locale. Con riferimento alla
figura 6 le trasformazioni possono essere espresse mediante le formule:
X p X ' 0 cos α senα X ' P
Y = Y ' + − senα cos α Y '
P
P 0
o quelle inverse:
X 'p cos α − senα X P − X ' 0
' =
Y
P senα cos α YP − Y '0
37
CONCETTI GEOMETRICI GENERALI
‘
Fig.6 – Rototraslazione piana.
Rototraslazione con variazione di scala isotropa
La trasformazione è analoga a quella precedente ma contempla il caso che i
due sistemi di riferimento siano in una scala diversa. Per effettuare questa
trasformazione è allora necessario conoscere 4 parametri e, precisamente, i tre
precedenti più un fattore di scala λ. In notazione matriciale la trasformazione
da sistema locale a globale si può esprimere come:
X p X '0
cos α senα X ' P
Y = Y ' + λ − senα cos α Y '
P
P 0
e quella inversa (da sistema globale a quello locale):
X 'p
cos α − senα X P − X ' 0
' = λ−1
Y
senα cos α YP − Y ' 0
P
Molto spesso il fattore di scala risulta essere dovuto a deformazioni indotte
nell'elaborato cartografico dal tipo di rappresentazione, o da stiramenti del
supporto cartaceo o ancora dalla propagazione degli errori nelle misure. In
alcuni casi, è utile invece stimare i parametri della trasformazione, con una
procedura a ritroso, a partire da un numero sufficiente di punti noti nei due
sistemi di riferimento. Il sistema può essere riscritto:
X 0 + λX ' P cos α + λY ' P senα − X P = 0
Y0 − λX ' P senα + λY ' P cos α − YP = 0
38
CONCETTI GEOMETRICI GENERALI
Il sistema non è lineare nelle quattro incognite X0, Y0, λ e α, ma può essere
linearizzato con la sostituzione:
a = λ cosα
b = λ senα
In tale modo i quattro parametri incogniti sono X0, Y0, a, b:
X 0 + aX ' P +bY ' P − X P = 0
Y0 + aY ' P −bX ' P −YP = 0
È necessario disporre di almeno 4 equazioni, derivanti dalla conoscenza di
almeno due punti di coordinate note nei due sistemi di riferimento. Ricavati i 4
parametri si può risalire all'angolo α e al fattore di scala λ mediante le:
λ = a2 + b2
b
α = arctg
a
I modelli di trasformazione possono essere ulteriormente ampliati,
introducendo ulteriori parametri che modellizzano effetti più complessi di
cambio di sistema di riferimento e deformazioni eventuali. Non vengono in
questa sede affrontate le trasformazioni affini (a 5 e 6 parametri) e omografiche
(a 7 e 8 parametri).
7. Siano date le coordinate di 4 punti espresse in un sistema di riferimento locale:
X1= 120,37 m; X2 = 215,51 m; X3 = 150,14 m; X4 = 392,12 m
Y1= 85,95 m; Y2 = 321,07 m; Y3 = 412,30 m; Y4 = 49,75 m
Le coordinate dei punti 1 e 2 sono pure note in un sistema di riferimento globale:
E1 = 1214,17 m; E2 = 1338,59 m
N1 = 1417,61 m; N2 = 1638,56 m
Si vogliono ricavare i parametri della trasformazione da sistema locale a globale e le
coordinate dei punti 3, 4 nel sistema globale.
Possiamo portarci in un sistema di riferimento baricentrico sia per le coordinate
(X, Y) che per le coordinate (E, N); per fare ciò è sufficiente sottrarre a queste
coordinate le costanti (XG, YG), (EG, NG), dove:
XG = (X1+ X2 )/2; YG = (Y1+ Y2 )/2; EG = (E1+ E2 )/2; NG = (N1+ N2 )/2
39
CONCETTI GEOMETRICI GENERALI
Indicheremo queste coordinate baricentriche con (x, y) e con (e, n).
Nell’esempio si ha:
XG = 167,94; YG = 203,51; EG = 1276,38; NG = 1528,085
Il sistema può essere scritto in coordinate baricentriche nella forma:
e0 + ax + by − e = 0
n0 − bx + ay − n = 0
Con i due punti noti in entrambi i sistemi si può scrivere il sistema di quattro
equazioni in quattro incognite:
x1
x
2
y1
y2
y1
y2
− x1
− x2
1
1
0
0
0
0
1
1
a e1
b e2
e = n
0 1
n n
0 2
Ora osserviamo la prima e la seconda equazione, la terza e la quarta: nel
sistema baricentrico:
x1 = - x2; y1= - y2; e1= - e2; n1= - n2
La somma delle prime due equazioni e quella delle ultime due ci forniscono:
e0 = n0 = 0
Il sistema di quattro equazioni si è ridotto ad un sistema di due equazioni in
due incognite. Possiamo sfruttare le sole due equazioni indipendenti, ad
esempio la prima e la terza o la prima e la quarta:
x1
y2
y1 a e1
=
− x 2 b n2
e numericamente:
− 47,57 − 117,56
117,56 − 47,57
a − 62,21
=
b 110,475
Si può risolvere il sistema o invertire la matrice dei coefficienti e moltiplicarla
per il vettore dei termini noti. In ogni caso si ricavano i valori:
a = 0,99151367; b = 0,1279661
da cui si ricavano:
λ = 0,9997373; α = 8,17113 gon
40
CONCETTI GEOMETRICI GENERALI
Le coordinate dei punti 3 e 4 nel sistema globale sono ricavabili dalle:
e0 + ax + by − e = 0
n0 − bx + ay − n = 0
e a b x
=
n − b a y
da questa si ricava:
E EG a b X − X G
=
+
N N G − b a Y − YG
ed, inserendo i valori numerici:
E3 = 150,14 m; N3 = 412,30 m
E4 = 1478,98 m; N4 = 1346,94 m
N.B. Tale modo di risolvere il problema NON è più valido nel caso in cui il
numero di misure superi il numero di incognite, quando si hanno a disposizione
ad esempio tre o più punti di coordinate note in entrambi i sistemi. In tal caso
occorre seguire la tecnica statistica di risoluzione, basata sull’applicazione del
metodo dei minimi quadrati. Vedremo tuttavia che anche in quel caso sarà
comodo riferirsi ad un sistema baricentrico.
Sistemi di riferimento spaziali
I sistemi di riferimento spaziali si possono dividere in (fig. 7):
Cartesiano ortogonale spaziale
È analogo a quello trattato nel caso piano con la sola aggiunta della terza
coordinata Z. Un punto è individuato nel sistema di riferimento R mediante le
tre coordinate R(X, Y, Z).
Cilindrico
È analogo a quello polare piano. La terza dimensione viene rappresentata dalla
coordinata Z analogamente a quanto avviene nel riferimento cartesiano
ortogonale spaziale. Un punto è individuato nel sistema di riferimento R
mediante i parametri R(O, ρ0, ϑ, Z). Può essere utilizzato in sede di misura
qualora si desideri separare nel rilievo la parte altimetrica da quella
planimetrica (esempio: rilievo planimetrico condotto per coordinate polari e
altimetria misurata direttamente con livellazione geometrica).
41
CONCETTI GEOMETRICI GENERALI
Polare spaziale
In questo riferimento un punto viene individuato mediante un angolo di
direzione λ, una distanza spaziale σ ed un angolo ϕ, di cui deve ruotare in
senso orario l'asse Z per sovrapporsi alla direzione OP. Come detto
precedentemente, se l'asse Z coincide con la verticale, l'angolo ϕ è anche detto
angolo zenitale. Alternativamente è possibile usare il complementare angolo α
dell'angolo ϕ (se l'asse Z coincide con la verticale l'angolo α viene detto
angolo di altezza). Un punto viene determinato nel sistema di riferimento R
mediante i parametri R(O, σ, ϑ, ϕ). Esistono strumenti topografici (strumenti
integrati e stazioni totali) che possono misurare sia angoli (azimutali e zenitali)
che distanze. Il sistema polare spaziale risulta il loro naturale riferimento.
σ
λ
Fig.7 – Sistemi di riferimento spaziali.
Analogamente ai sistemi piani le trasformazioni possono essere espresse con
semplici relazioni trigonometriche e geometriche:
42
CONCETTI GEOMETRICI GENERALI
Da polare a cartesiano e viceversa
X = σ cos ϕ cos λ
Y = σ cos ϕsenλ
Z = σsenϕ
σ = X 2 + Y 2 + Z 2
Y
λ = arctan
X
ϕ = arccos Z
σ
Da polare a cilindrico e viceversa
ρ 0 = σsenϕ
Z = σ cos ϕ
ρ0
ϕ = arctan Z
σ = ρ 2 + Z 2
0
Da cartesiano a cilindrico e viceversa
X = ρ 0 senϑ
Y = ρ cos ϑ
0
2
2
σ = X + Y
X
ϑ = arctan Y
43
2. GEODESIA
8. Superga ha coordinate geodetiche:
(ϕ , ω , h ) = (45°04'48",308;
− 4°41'03" ,307; 310,764 m )
ricavare r, RN, (x, y, z) nel sistema di Hayford.
λ = λMM + ω
λ = 12°27'08" ,400 − 4°41'03" ,307 = 7°46'05" ,093
Nel sistema di Hayford si hanno le seguenti costanti:
a = 6378388,00m; α=1/297
c
⇒ c = (1 − α ) a = 6 356 911,946 m
a
c2
e 2 = 1 − 2 = 0,00672267
a
α = 1−
Sapendo che valgono le seguenti relazioni, otteniamo:
r=
RN =
a cos ϕ
1 − e sin ϕ
2
2
= 4 . 511. 502,791 m
r
= 6 .389 .165,17 m
cos ϕ
Infine possiamo determinare (x, y, z):
X S = ( RN + h ) cos ϕ cos λ = 4 470 319,469 m
YS = ( RN + h ) cos ϕ sin λ = 609 820,712 m
Z = R ⋅ (1 − e 2 )sin ϕ + h sin ϕ = 4 493 938,219 m
N
S
45
GEODESIA
9. Date le coordinate di un punto P = (ϕ ; λ ; h ) sull’ellissoide GRS 80:
(ϕ, λ , h ) = (45°03'48" ,1186;
7°39'40" ,6046; 310,764 m )
− passare da (ϕ ; λ ; h ) ⇒ (X, Y, Z ) ⇒ (ψ ; λ ; σ )
− passare da (ψ ; λ ; σ )⇒ (X, Y, Z ) ⇒ (ϕ ; λ ; h )
Determiniamo le coordinate (X , Y , Z ).
a = 6 378 137,00 m α =
1
c
α = 1 − ⇒ c = (1 - α ) ⋅ a
298,2572
a
c = 6 356 752,312 m
e2 = 1 −
RN =
c2
= 0,006694380518
a2
a
1 − e 2 sin 2 ϕ
= 6 388 862,021 m
X P = ( RN + h ) cos ϕ cos λ = 4 472 544,489 m
YP = ( RN + h ) cos ϕ sin λ = 601 634,185 m
Z = R ⋅ (1 − e 2 )sin ϕ + h sin ϕ = 4 492 545,117 m
N
P
Determiniamo le coordinate (ψ ; λ ; σ ) utilizzando le relazioni:
Yp
= 7° 39' 40" ,6046
λ P = arctg
X
P
ZP
= 44° 52' 15" , 4253
ψ P = arcsen
2
2
2
+
+
X
Y
Z
P
P
P
2
2
2
σ P = X P + YP + Z P = 6 367 776, 655 m
Determiniamo ora le coordinate (XP, Yp, Zp ) partendo dalle coordinate (ψ; λ;σ)
X P = σ cosψ cos λ = 4 472 544,489 m
YP = σ cosψ sin λ = 601 634,185 m
Z = σ sin ψ = 4 492 545,117 m
P
Ricaviamo ora le coordinate (ϕ; λ; h) utilizzando il metodo perturbativo:
46
GEODESIA
λ = arctg
Y
= 7°,661279
X
X 2 + Y 2 = ( RN + h ) cos ϕ = 4 512 828,148 m
r=
e 2 RN
Z
tgϕ
= 1 −
r
RN + h
⇒ ϕ = arctg
Z
= 44°,87095
r
avendo trascurato in prima approssimazione il secondo termine in parentesi. Si
procede quindi con il calcolo di RN utilizzando il ϕ appena calcolato:
RN =
a
1 − e 2 sen 2 ϕ
= 6 388 789,96 m
e quindi a partire dalla relazione r = ( RN + h) cos ϕ ricavo:
h=
r
− RN = −21 013,31 m
cos ϕ
e così procedo con successive iterazioni sino alla convergenza dei risultati:
ϕ = 45 ° ,0640
1°iteraz. R N = 6 388 862, 263 m
h = 382,778 m
ϕ = 45 ° ,0634
2°iteraz. RN = 6 388 862,020 m
h = 310,522 m
ϕ = 45 ° ,0634
3°iteraz. R N = 6 388 862,021 m
h = 310,765 m
ϕ = 45 ° ,0634
4°iteraz. RN = 6 388 862,021 m
h = 310,764 m
10. Date le coordinate di un punto P = (ϕ ; λ ; h ) sull’ellissoide GRS 80:
(ϕ, λ , h ) = (45°; 10°; 500 m ) ,
determinare il valore della gravità normale γ e stimare il potenziale di gravità W(P).
Le costanti dell’ellissoide GRS 80 sono:
47
GEODESIA
a = 6378137,00
α=
1
298,257224
c
c = (1 − α )⋅ a = 6356752,313
a
c2
2
e = 1 − 2 = 0,00669438
a
a
RN =
= 6 .388.838,3 m
1 − e 2 sin 2 ϕ
α =1−
GM = 398. 600,5 ⋅ 10 +9 m 3s − 2
ω = 7,29215 ⋅10 −5 rad s −1
mediante le quali otteniamo le coordinate geocentriche:
X P = ( R N + h) cos ϕ cos λ = 4 . 449 .306,7 m
.
YP = ( R N + h) cos ϕ sin λ = 784 532,8 m
Z = R ⋅ (1 − e 2 )sin ϕ + h sin ϕ = 4 . 487 . 701,9 m
N
P
passiamo alle coordinate polari utilizzando le relazioni:
Yp
= 10°
λ P = arctg
XP
ZP
= 44° 48' 27" ,33
ψ P = arcsen
2
2
2
X P + YP + Z P
2
2
2
σ P = X P + YP + Z P = 6 367 989,540 m
Si può ora procedere con il calcolo di γ e di W (in realtà il potenziale normale U è
la sola parte stimabile) dopo aver calcolato k:
ω2 a 3
k = α −
2GM
2a 2
= 4,4042072 ⋅ 1010 m 2
3
γ 0 = 9,780327 ⋅ (1 + 0,0053024 ⋅ sen 2 ϕ − 5,8 ⋅ 10 −6 ⋅ sen 2 2ϕ) = 9,80619988 ms −2
γ h = −0,30877 ⋅ (1 − 0,00142 ⋅ sen 2 ϕ) ⋅10 −5 ⋅ ∆h = −0,00154275 ms − 2
γ = γ 0 + γ h = 9,80465712 ms −2
U=
48
GM
σ
k
ω 2 σ 3 cos 2 ψ
2
1
1
3
sen
+
−
ψ
+
= 62 632 038 ms −2
2 2
GM
σ
(
)
GEODESIA
11. Il vertice IGM del 1° ordine Superga (asse cupola) ha le seguenti coordinate
geografiche (riferite all’ellissoide internazionale):
ϕ = 45°04’48,308”; λ = -4°41’03,307”; h = 310,764 m
Calcolare:
1. i raggi principali di curvatura ed il raggio della sfera locale;
2. il raggio di curvatura di una sezione obliqua di azimut α = 45° ed inclinata di
β = 30° rispetto alla normale n’;
3. il raggio del parallelo.
L' ellissoide internazionale di Hayford è caratterizzato dalle seguenti costanti:
a = 6378388 m
e2 = 0,006722670022
Il raggio minimo di curvatura ρ sarà:
ρ=
(
)
ϕ)
a ⋅ 1 − e2
(1 − e
2
sin 2
3/ 2
= 6 367 676,651 m
Il raggio massimo di curvatura RN sarà:
RN =
(1 − e
a
2
sin 2 ϕ
)
= 6 389 165,170 m
Il raggio della sfera locale sarà:
R = ρ ⋅ RN = 6 378 411,861 m
Di seguito calcoleremo il raggio di curvatura della sezione obliqua.
Mediante le formule di Eulero si verrà ad avere:
1
cos 2 α sin 2 α
=
+
Ra
ρ
RN
Ra = 6 378 402,812 m
Il raggio di curvatura della sezione obliqua sarà:
r = Rα ⋅ cos β = 5 533 179,346 m
Il raggio del parallelo vale:
r = RN ⋅ cos ϕ = 4 511 502,791 m
49
GEODESIA
12. Si considera la geodetica uscente con azimut α = 40° da un punto di latitudine
ϕ = 44° , λ = 9°.
Calcolare l’azimut della geodetica in P’ e P” di latitudine ϕ’ = 45° e ϕ” = 46° con i
parametri dell’ ellissoide di Hayford.
a = 6378388,00 m; α = 1/297
c
⇒ c = (1 − α) ⋅ a = 6 .356 .911,946 m
a
c2
e 2 = 1 − 2 = 0,00672267
a
α =1−
Si utilizza la relazione di Clairaut:
r ⋅ sin α = cost =K
Si avrà:
r=
a ⋅ cos ϕ
(1 − e
2
sin ϕ
2
)
⇒K=
a ⋅ senα ⋅ cos ϕ
(1 − e
2
sin 2 ϕ
)
= 2954051,737
Da cui si otterranno le seguenti relazioni:
a ⋅ cos ϕ '
⋅ senα ' = K
2
2
'
1 − e sin ϕ
a ⋅ cos ϕ "
⋅ senα " = K
1 − e 2 sin 2 ϕ "
(
)
(
)
Mediante le quali si avrà:
(
)
(
)
1 − e 2 sen 2 ϕ '
= 40°,83398
α ' = arcsen
⋅
K
a ⋅ cos ϕ '
1 − e 2 sen 2 ϕ ''
"
= 41°,72436
arcsen
α
=
⋅
K
''
cos
a
⋅
ϕ
13. Verificare i teoremi della geodesia operativa.
A partire dal vertice IGM di Superga considerare una geodetica uscente avente azimut
α=100° e una lunghezza di 100, 500, 1000, 10000, 20000 km.
50
GEODESIA
L' ellissoide internazionale è caratterizzato dalle seguenti costanti:
a = 6378388 m
e2 = 0,006722670022
Le coordinate di Superga sono:
ϕ = 45°04'48" ,308
λ = −4°41'03" ,307
h = 310,764 m
Viene di seguito determinato l'errore ε:
ε=
1
s' − s
s4
=
⋅
360 R N 2 ⋅ Rα 2
s'
e2
⋅
2
1 − e
⋅ sen 2 2α cos 4 ϕ
I raggi di curvatura massimo e minimo saranno:
RN =
(1 − e
a
2
sin 2 ϕ
)
= 6389165,170 m ; ρ =
a ⋅ (1 − e 2 )
(1 − e
2
⋅ sin 2 ϕ)
3/ 2
= 6367676,65 m
da cui si avrà:
1
cos 2 α sen 2α
=
+
= 0,156530897 ⋅ 10 − 6
Rα
ρ
RN
∆α = Az − α =
s2
12 R N Rα
e2
2
1− e
sen 2α cos 2 ϕ
Di seguito viene proposta una tabella riassuntiva con i risultati.
s
0
.
-14
100 km
3,28165· 10
500 km
2,0510· 10
1000 km
3,28165· 10
-11
¨.
-8
100° -2,3564· 10
-7
100° -5,891· 10
-10
100° -2,3564· 10
10000 km 3,28165· 10
-6
100° -2,3564· 10
-5
100° -9,4256· 10
20000 km 5,2506· 10
-6
-4
-4
51
GEODESIA
14. Del punto P di coordinate ellissoidiche (ellissoide GRS80): latitudine = 45°15’,
longitudine = 9°, h = 200 m; deviazione della verticale ξ = 30”, η = -20”, ondulazione
N = 42,2 m, calcolare le coordinate naturali.
Calcolare inoltre le coordinate di un secondo punto Q che nel riferimento cartesiano
locale con origine in P dista x=1000 m , y=-500 m, z=-0,5 m.
L’ellissoide GRS80 è caratterizzato dalle seguenti costanti:
a = 6 378 137,00
α=
1
298,2572
c
c = (1 − α ) ⋅ a = 6 356 752,313
a
c2
e 2 = 1 − 2 = 0,00669438
a
a
RN =
= 6 388 931,913 m
1 − e 2 sin 2 ϕ
α =1−
GM = 398 600,5 ⋅ 10 −9 m 3s -2
ω = 7,29215 ⋅ 10 −5 rad s -1
A20=1082,63· 10-6
Le relazioni che legano le coordinate (ϕ, λ, h) alle coordinate naturali (Φ,Λ,H)
sono le seguenti:
ξ = Φ − ϕ
η = (Λ − λ ) cos ϕ
h = H + N
da cui si ottiene:
φ = ϕ = 30' '+45°15'+ξ = 45°15'30' '
η
− 20' '
Λ=
+λ =
+ 9° = 8°59'31' ' ,59
cos ϕ
cos 45°15'
H = h − N = −42,2 + 200 = 157,8
52
GEODESIA
Calcolo delle coordinate XP, YP, ZP in funzione delle coordinate naturali
(φH)
X P = ( RN + Η ) cos φ cos Λ = 4 442 664,57 m
YP = ( RN + Η ) cos φ sin Λ = 703 648,94 m
Z = R ⋅ (1 − e 2 ) sin φ + Η sin φ = 4 507 093,46 m
N
P
si procede ora con il calcolo delle coordinate XQ, YQ, ZQ.
cos Λ
0 X Q − X P
x − sin Λ
y = − sin φ cos Λ − sin φ sin Λ cos φ ⋅ YQ − YP
z cos φ cos Λ
cos φ sin Λ sin φ Z Q − Z P
X Q = 4 442 858,510 m
YQ = 704 692,124 m
Z Q = 4 506 741,102 m
Con il metodo perturbativo si calcolano le coordinate del punto Q:
Λ = arctg
r=
YQ
XQ
= 9°,012737
X Q2 + YQ2 = 4 498 397,796 m
e 2 RN
Z
tgφ
= 1−
r R N + h
⇒ φ = arctg
ZQ
r
= 45°,0531
avendo trascurato in prima approssimazione il secondo termine in parentesi. Si
procede quindi con il calcolo di RN utilizzando il valore di φ appena calcolato:
RN =
a
1 − e 2 sen 2 φ
= 6 388 858,171 m
e quindi a partire dalla relazione r = ( R N + h) cos φ si ricava:
h=
r
− R N = −21 260,657 m
cos φ
e così si procede con successive iterazioni sino alla convergenza dei risultati:
53
GEODESIA
φ = 45° ,2462
1°iteraz. RN = 6 388 930,472 m
þ = 272,539 m
e, dopo altre iterazioni
φ = 45° ,2455
4°iteraz. RN = 6 388 930,228 m
þ = 199,601 m
15. Dal punto P di coordinate ellissoidiche (GRS80): latitudine = 45°15',
longitudine = 9°, h = 200 m; si misurano azimut e distanza ad un secondo punto Q:
azimut = 60°15'20'' distanza = 12135,3 m.
Si desiderano ricavare le coordinate geografiche di Q.
Si desiderano le coordinate geografiche rettangolari di Q.
Si desiderano i due raggi di curvatura in P e Q.
L'ellissoide (GRS80) è caratterizzato dalle seguenti costanti geometriche:
a = 6378137 m
1
298, 2572
c
c
α = 1 − ⇒ = 1 − α = 0,996647189
a
a
2
c
e 2 = 1 − 2 = 6,694380517 ⋅10 −3
a
α=
Essendo s = 12135,3m < 100 km, allora si può risolvere direttamente il
problema sulla superficie dell'ellissoide a mezzo degli sviluppi di Legendre.
ϕQ = ϕ P +
−
s ⋅ cos α P s 2 ⋅ sin ϕ P
−
ρP
2ρ P
s 3 ⋅ sin 2 α P ⋅ cos α P
λQ = λP +
6ρ P
3
(1 + 3tg
sin 2 α P
3e 2 ⋅ cos ϕ P ⋅ cos 2 α P
⋅
+
+
ρ P 1 − e 2 sin 2 ϕ P
RN P ⋅ cos ϕ P
(
2
)
ϕ P = 45°18 '14" ,741
s ⋅ sin α P
s 2 ⋅ sin 2α P ⋅ sin ϕ P
s3
+
+
⋅
2
RN P ⋅ cos ϕ P
6 RN P ⋅ cos 2 ϕ P
2 RN P ⋅ cos 2 ϕ P
sin 2α P ⋅ cos α P 2tg 2 ϕ P ⋅ 3 sin α P
°
'
⋅
+
= 9 08 03" ,639
ρP
RN P
54
)
GEODESIA
Dove ρP e RNP sono stati calcolati dalle seguenti relazioni:
ρP =
(
a ⋅ 1− e2
(1 − e
RNP =
2
(1 − e
)
⋅ sin 2 ϕ P
)
3/ 2
a
2
)
1/ 2
⋅ sin ϕ P
2
=
635439,324
= 6 367 661,744 m
0,994939678
=
6378137
= 6 388 931,913 m
0,998310372
Si determinano ora le coordinate geografiche rettangolari di Q.
3ε =
s 2 ⋅ sin α P ⋅ cos α P
2 ⋅ ρ P ⋅ RN P
⇒
ε = 0°0' 0'' ,0536
Calcolo delle coordinate del punto Q rispetto al polo P
X Q = s ⋅ sen (α P − ε ) = 10 536,435 m
YQ = s ⋅ cos(α P − 2ε ) = 6 020,720 m
I raggi di curvatura in Q saranno:
ρQ =
(1 − e
R NQ =
(
a ⋅ 1− e2
2
(1 − e
)
⋅ sin ϕ Q
2
)
a
2
⋅ sin 2 ϕ Q
3/ 2
)
1/ 2
= 6 367 722,315 m
= 6 388 952,170 m
16. Due punti P e Q hanno coordinate ellissoidiche (GRS80):
P: ϕ = 45°15’, λ = 9°, h = 200 m;
Q: ϕ = 45°35’, λ= 9° 15’, h = 400 m
Si desiderano ricavare le coordinate polari di Q rispetto a P (azimut e lunghezza della
geodetica).
Si desiderano le coordinate geografiche rettangolari di Q.
Si calcolino i due raggi di curvatura in P e Q.
Per il triangolo rettangolo che ha ipotenusa PQ si calcolino gli angoli
sull’ellissoide e sul piano con l’uso del Teorema di Legendre.
L' ellissoide (GRS80) è caratterizzato dai seguenti parametri:
a = 6 378 137 m
55
GEODESIA
1
298, 2572
c
c
α = 1 − ⇒ = 1 − α = 0,996647189
a
a
2
c
e 2 = 1 − 2 = 6,694380517 ⋅10 −3
a
α=
Si determinano ora i raggi di curvatura in P:
(
)
a ⋅ 1− e2
ρ
=
= 6 367 661,743 m
P
3/ 2
1 − e 2 ⋅ sin 2 ϕ P
a
R =
= 6 388 931,913 m
1/ 2
2
2
NP
1
sin
−e ⋅
ϕP
(
)
(
)
E in Q:
(
)
a ⋅ 1− e2
= 6 368 034,976 m
ρ Q =
3/ 2
1 − e 2 ⋅ sin 2 ϕ Q
a
R =
= 6 389 056,737 m
1/ 2
2
2
NQ
1
sin
e
− ⋅
ϕQ
(
)
(
)
Si calcolano ora XQ e YQ:
X Q = RN ,Q ⋅ cos ϕ Q (λ Q − λ P ) = 19 510,671 m
YQ = ρ m ⋅ (ϕ 3 − ϕ P ) = 37 078,129 m
dove:
(λ Q − λ P )2 ⋅ R N ⋅ senϕ Q ⋅ cos ϕ Q
Q
ϕ3 = ϕ Q +
2 ⋅ ρQ
e
ρm =
(1 − e
con ϕ m =
56
(
a ⋅ 1 − e2
2
)
⋅ sin 2 ϕ m
)
(ϕ3 + ϕ P )
2
3/ 2
GEODESIA
Si determina ora l' eccesso sferico ε
3ε =
X Q ⋅ YQ
2 ⋅ ρ medio ⋅ RNmedio
= 0°00'01" ,834
dove il raggio ρ medio e RNmedio sono stati calcolati utilizzando
ϕ medio =
ϕ P + ϕQ + ϕ3
3
Verranno successivamente calcolati αP ed s
X Q + ε ⋅ YQ
α P = arctg
YQ − 2ε ⋅ X Q
s=
(X
+ ε ⋅ YQ ) + (YQ − 2ε ⋅ X Q ) = 41 898,087 m
2
Q
= 27°45'13" ,482
2
Sull'ellisoide si avranno:
α elliss . = α P = 27°45'13" ,482
β elliss . = 90°
γ
elliss . = 90° + 3 ⋅ ε − α P = 62°14'48" ,352
e sul piano:
α piano = α P − ε = 27°45'12" ,870
β piano = 90° − ε = 89°59'59" ,389
γ
piano = 90° − α P + 2ε = 62°14'47" ,741
57
3. CARTOGRAFIA
17. Siano date le coordinate geografiche di un punto P, nel sistema Roma 40:
ϕ = 45°26’32,243”; λ’ = -4°39’13,491”
Determinare le coordinate cartografiche Gauss-Boaga. Eseguire poi il passaggio
inverso.
La longitudine riferita a Greenwich si ottiene dalla λ = λ’ + λ0, dove λ0 è la
longitudine del meridiano origine.
I coefficienti delle formule dirette e inverse di Hirvonen, calcolati in funzione
dell’ellissoide di Hayford e WGS84 valgono:
A1=
A2=
A3=
A4=
c=
ε2=
e1=
WGS84
0,998324298453
0,002514607060
0,000002639047
0,000000003418
WGS84
6356752,314
0,006739496742
0,001679220386
Hayford
0,998317208078
0,002525251575
0,000002661455
0,000000003462
Hayford
6356911,946
0,006768170197
0,001686340641
B1=
B2=
B3=
B4=
WGS84
0,00251882658434
0,00000370094904
0,00000000744781
0,00000000001704
Hayford
0,00252950691487
0,00000373240109
0,00000000754296
0,00000000001733
59
CARTOGRAFIA
Sistema geodetico-cartografico
nazionale
Parametri
ellissoide
DATUM
Origini
longitud. λ
Ampiezza
fusi
Denominazione fuso
Meridiano
centrale λ0
Falsa
origine x0
Falsa
origine y0
Sistema geodeticocartografico internazionale
UTM
WGS84: a=6378137 m
e2 = 0,006694379990
WGS84
Hayford: semiasse equatoriale a = 6378388 m
Eccentricità quadratica e2 = 0,006722670022
Roma 1940
ED50
Roma Monte Mario (MM)
Sistema geodeticocartografico
UTM WGS84
Greenwich (GW)
6° per tutti i fusi
Ovest
-3°27’08,40”
Est di MM
Est
2°32’51,60”
Est di MM
1.500 km
2.520 km
0 km
Modulo
contraz. CR
32
9°
Est di GW
33
15°
Est diGW
32
9°
Est di GW
33
15°
Est
diGW
500 km per tutti i fusi
0 km per l’emisfero Nord
10000 km per l’emisfero Sud
0,9996 per tutti i fusi
Tab. 1 – Convenzioni dei sistemi geodetici e cartografici, nazionale e internazionale.
Per il punto richiesto si ha:
v=
z=
v1 =
Trasformazione diretta
-0,02096863 rad
λ'=
x=
-94000,365 m
y=
5034895,366 m
Est=
1406037,235 m
Nord=
5032881,407 m
1,0016645351017
0,7932278572047
1,0016641625634
Trasformazione inversa
x=
-94000,365 m
y=
5034895,365 m
0,790698579 rad
ϑ=
0,793227857 rad
ξ=
-0,020968633 rad
λ'=
45°26’32,243”
ϕ=
-4°39’13,491”
λ=
18. Prendere in considerazione tre particolari naturali indicati alla mappa di cui si
possa misurare la quota su un foglio di cartografia 1:100000 (1:50000 / 1:25000).
Tali punti (vertici trigonometrici, cime di monti, incroci, ecc.) siano disposti
grossomodo a triangolo equilatero e abbraccino buona parte del foglio.
Determinare (ϕ, λ, H) di ciascun punto nel sistema Roma 40.
Determinare le coordinate (E,N)GAUSS BOAGA di ogni punto scelto.
Determinare le coordinate (E,N)UTM di ogni punto scelto.
Il modulo di deformazione nei punti A (mA), B (mB), C (mC), e il modulo di
deformazione lineare nei tratti AB (mAB), BC (mBC), AC (mAC).
L’azimut α da A verso B, da B verso C e da C verso A.
60
CARTOGRAFIA
Le variazioni ∆E e ∆N delle coordinate UTM nel passaggio a coordinate GaussBoaga.
La distanza AB sull’ellissoide (de) e la distanza AB inclinata (di).
Gli angoli BAC, CBA, ACB sull’ellissoide.
Cartografia utilizzata:
− FOGLIO 45 (MILANO) scala 1:100 000
− ∆E = 999945m
− ∆N = 178m
Punti scelti:
− GERENZANO
− OPERA
− MELZO
Calcolo le coordinate geografiche, Gauss-Boaga e UTM nei punti A, B, C.
GERENZANO
Ricavo dalla carta, mediante semplici proporzioni le coordinate geografiche:
þ
= 226 m
ϕ A = 45° 40' − 1' 39' ' = 45° 38' 21' '
ω A = - 3° 30' + 2' 37' ' = - 3° 27' 23' '
λ A = 12° 27' 08" ,40 − 3° 27' 23' ' = 8° 59' 45" ,39
Utilizzando le coordinate Gauss-Boaga dei vertici della carta riportate sulla
carta stessa, ricavo mediante semplici proporzioni le coordinate E, N nel
sistema Gauss-Boaga:
E AGB = 1 496 369 + 3 500 = 1 499 869 m
N AGB = 5 057 058 − 3 100 = 5 053 958 m
Utilizzando ora il reticolato chilometrico riportato sulla carta, ricavo sempre
con le stesse proporzioni le coordinate E, N nel sistema UTM:
E UTM
= 500 000 − 100 = 499 900 m
A
N UTM
= 5 050 000 + 4 150 = 5 054 150 m
A
Note le costanti per il passaggio dalle coordinate Gauss-Boaga alle coordinate
UTM del foglio 45 è possibile valutare lo scarto con cui abbiamo determinato
le coordinate UTM sulla carta:
61
CARTOGRAFIA
= 1 499 869 − 999945 = 499 924 m
E UTM
A
∆ E = 24 m
= 5 053 958 + 178 = 5 054 136 m
N UTM
A
∆ N = 14 m
Si riporta a fine capitolo la tabella fornita dall’IGM che permette il passaggio
al metro tra le coordinate Gauss Boaga e le coordinate UTM all’interno di un
foglio in scala 1:100000.
OPERA
Utilizzando lo stesso procedimento si ricavano le coordinate geografiche di
Opera (punto B):
ϕ B = 45° 20' + 2' 55" ,08 = 45° 22' 55" ,08
ω B = - 3° 00' + 14' 42" ,27 = - 3° 14' 42" ,27
λ B = 12° 27' 08" ,40 − 3° 14' 42" ,27 = 9° 12' 26" ,12
Si stima inoltre H = 101m.
Le coordinate E, N nel sistema Gauss-Boaga lette graficamente sono:
E B = 1 535 518 − 19 220 = 1 516 298 m
GB
N B = 5 020 126 + 5 160 = 5 025 286 m
GB
Le coordinate E, N nel sistema UTM:
UTM
EB
UTM
NB
= 520 000 − 3 680 = 516 320 m
= 5 030 000 − 4 550 = 5 025 450 m
Le coordinate E, N di Opera nel sistema UTM, calcolate a partire da quella
Gauss Boaga, valgono:
= 1 516 928 − 999945 = 516 353 m
E UTM
B
N
62
UTM
B
= 5 025 286 + 178 = 5 025 464 m
∆ = 33 m
∆ = 14 m
CARTOGRAFIA
MELZO
Utilizzando lo stesso procedimento si ricavano le coordinate geografiche di
Melzo (punto C):
ϕ C = 45° 20' + 9' 512" ,89 = 45° 29' 51" ,89
ω C = - 3° 00' − 1' 43" ,85 = - 3° 1' 43" ,85
λC = 12° 27' 08" ,40 − 3° 1' 43" ,85 = 9° 25' 24" ,54
þ = 117 m
Le coordinate E, N nel sistema Gauss-Boaga valgono:
ECGB = 1 535 518 − 2 350 = 1 533 168 m
N CGB = 5 020 126 + 18 230 = 5 038 356 m
Le coordinate E, N nel sistema UTM:
ECUTM = 530 000 + 3 200 = 533 200 m
N CUTM = 5 040 000 − 1 450 = 5 038 550 m
Le coordinate E, N di Melzo nel sistema UTM, calcolate da quelle di Gauss
Boaga, sono:
ECUTM = 1 533 168 − 999945 = 533 223 m
N CUTM = 5 038 356 + 178 = 5 038 534 m
∆ = 23 m
∆ = 16 m
Calcolo del modulo di deformazione nei punti A, B, C
Si utilizzerà come ellissoide di riferimento quello di Hayford avente come
costanti:
a = 6378388,00 m; α = 1/297
c
⇒ c = (1 − α) ⋅ a = 6 .356 .911,946 m
a
c2
e 2 = 1 − 2 = 0,006722670022
a
α =1−
Calcolo del modulo di deformazione nel punto A
x A2
mA = 1 +
=1
2ρRN
63
CARTOGRAFIA
dove:
E AGB − E0
= −131,052 m
CR
CR = 0,9996
xA =
ρ=
a ⋅ (1 − e 2 )
= 6 368 305,327 m
(1 − e 2 sen 2 ϕ A ) 3 / 2
RN =
a
= 6 389 375,429 m
(1 − e sen 2 ϕ A )1 / 2
2
Analogamente per il punto B:
mB = 1 +
x B2
= 1,000003267
2ρRN
dove:
E BGB − E0
= 16 304,522 m
CR
CR = 0,9996
xB =
a ⋅ (1 − e 2 )
= 6 368 016,117 m
(1 − e 2 sen 2 ϕ B ) 3 / 2
a
= 6 389 278,705 m
RN =
2
(1 − e sen 2 ϕ B )1 / 2
ρ=
e per il punto C:
2
mC = 1 +
xC
= 1,00001353
2 ρRN
dove:
ECGB − E0
= 33 181,272 m
CR
CR = 0,9996
xC =
ρ=
2
a ⋅ (1 − e )
= 6 368 146,310 m
(1 − e 2 sen 2 ϕ C ) 3 / 2
RN =
64
a
= 6 389 322,248 m
(1 − e sen 2 ϕ C )1 / 2
2
CARTOGRAFIA
Calcolo del modulo di deformazione lineare lungo i tratti AB, BC, AC
Per il tratto AB avremo:
m AB = 1 +
x A2 + x A x B + x B2
6 ρR N
= 1,00000108
µ AB = m AB ⋅ CR = 0,99960108
dove:
E GB
A − E0
= −131,052 m
CR
E GB − E0
xB = B
= 16 304,522 m
CR
a ⋅ (1 − e 2 )
ρ=
= 6 368 160,725 m
(1 − e 2 sen 2ϕ ) 3 / 2
a
RN =
= 6 389 327,069 m
2
(1 − e sen 2ϕ )1 / 2
xA =
ϕ =
ϕ A + ϕB
= 45°30' 38'' ,04
2
Per il tratto BC avremo:
m BC = 1 +
x B2 + x B x C + x C2
6 ρR N
= 1,000007815
µ BC = m BC ⋅ CR = 0,999607812
dove:
E BGB − E 0
xB =
= 16 304,522 m
CR
E GB − E 0
xC = C
= 33 181,273 m
CR
a ⋅ (1 − e 2 )
= 6 368 081,214 m
(1 − e 2 sen 2ϕ ) 3 / 2
a
RN =
= 6 389 300,477 m
2
(1 − e sen 2ϕ )1 / 2
ρ=
ϕ =
ϕ B + ϕC
= 45°26' 23'' ,48
2
65
CARTOGRAFIA
Per il tratto AC avremo:
m AC = 1 +
x A2 + x A x C + x C2
6 ρR N
= 1,000004492
µ AC = m AC ⋅ CR = 0,99960449
dove:
E AGB − E0
= −131,052 m
CR
E GB − E0
= 33 181,273 m
xC = C
CR
CR = 0,9996
xA =
a ⋅ (1 − e 2 )
= 6 368 225,819 m
(1 − e 2sen 2ϕ ) 3 / 2
a
= 6 389 348,839 m
RN =
2
(1 − e sen 2ϕ )1 / 2
ϕ + ϕC
ϕ = A
= 45°34' 06'' ,44
2
ρ=
Calcolo delle distanze AB BC e CA sull’ellissoide (de) e le stesse distanze
inclinate (di)
Noto il modulo di deformazione lineare è possibile ricavare la distanza
sull’ellissoide:
µ AB =
s carta
AB
s ellissoide
AB
⇒
s
ellissoide
AB
carta
s AB
=
= d eAB = 33 058,581 m
µ AB
dove:
= ( E AGB − E BGB ) 2 + ( N AGB − N BGB ) 2 = 33 045,357 m
s carta
AB
) 2 + ( N UTM
) 2 = 33 045,357 m
= ( E UTM
− E UTM
− N UTM
s carta
AB
A
B
A
B
e quindi la distanza inclinata:
2
Q
∆Q AB
∆Q AB
+
d iAB = d eAB + d eAB ⋅ B +
2
2 ⋅ de
2R
R
66
= 33 059,664 m
CARTOGRAFIA
Nello stesso modo si procede per la distanza BC:
ellissoide
=
s BC
carta
s BC
= d eBC = 21 349,154 m
µ BC
dove:
carta
= ( E BGB − ECGB ) 2 + ( N BGB − N CGB ) 2 = 21 340,614 m
s BC
carta
= ( E BUTM − ECUTM ) 2 + ( N BUTM − N CUTM ) 2 = 21 340,614 m
s BC
e quindi la distanza inclinata vale:
d
BC
i
=d
BC
e
+d
BC
e
2
QC ∆Q BC
∆QBC
⋅
+
+
2
2 ⋅ de
2R
R
= 21 349,524 m
E in ultimo la distanza AC vale:
=
s ellissoide
AC
s carta
AC
= d eAC = 36 787,610 m
µ AC
dove:
= ( E AGB − ECGB ) 2 + ( N AGB − N CGB ) 2 = 36 772,895 m
s carta
AC
= ( E UTM
− ECUTM ) 2 + ( N UTM
− N CUTM ) 2 = 36 772,895 m
s carta
AC
A
A
e quindi la distanza inclinata:
d
AC
i
=d
AC
e
+d
AC
e
2
QC ∆Q AC
∆Q AC
⋅
+
+
2
2 ⋅ de
2R
R
= 36 788,761 m
Calcolo dell’azimut α da A verso B, da B verso C e da C verso A
α AB = γ A + ϑ 'AB − ε AB = 150°11'09' ' ,84
dove:
67
CARTOGRAFIA
x
x A2
= −0°0'04' ' ,33
γ A = arctg A ⋅ tgϕ A ⋅ 1 +
3 ⋅ RN2 ⋅ cos 2 ϕ A
RN A
A
E − EA
= 150°11'14' ' ,55
ϑ'AB = arctg B
NB − N A
ε AB =
(y A − y B )(2 x A + x B )
6 ⋅ ρ AB ⋅ RN AB
= 0°0'0' ' ,39
α BC = γ B + ϑ 'BC − ε BC = 52°22'54' ' ,16
dove:
x
γ B = arctg B ⋅ tgϕ B
RN B
E − EB
ϑ'BC = arctg C
NC − N B
ε BC
x B2
⋅ 1 +
3 ⋅ RN2 ⋅ cos 2 ϕ B
B
= 0°08'53' ' ,42
= 52°14'00' ' ,01
y
y
x
2
( − C )( B + xC ) 0 0'0' ' ,73
= B
=− °
6 ⋅ ρ BC ⋅ R N BC
α CA = γ C + ϑ'CA − ε CA = 295°24'29' ' ,17
dove:
xC
xC2
γ C = arctg
⋅ tgϕ C ⋅ 1 +
3 ⋅ RN2 ⋅ cos 2 ϕ C
RN C
C
E − EC
= 295°06'18' ' ,33
ϑ'CA = arctg A
N A − NC
ε CA =
( yC − y A )(2 xC + x A )
6 ⋅ ρCA ⋅ R N CA
= 0°18'09' ' ,97
= −0°0'0' ' ,87
Calcolo degli angoli CÂB, AB̂C, BĈA sull’ellissoide
CAˆ B = A = ϑ 'AB − ϑ 'AC − ε AB + ε AC = 35°04'56' ' ,27
ABˆ C = B = ϑ 'BC − ϑ'BA + 2π − ε BC + ε BA = 82°02'45' ' ,39
BCˆ A = C = ϑ' − ϑ' − ε + ε = 62°52'20' ' ,11
CA
68
CB
CA
CB
CARTOGRAFIA
dove gli angoli mancanti sono stati calcolati con le relazioni:
E − EA
= 115°06'18' ' ,33
ϑ'AC = arctg C
N
N
−
C
A
y
y
x
2
( − C )( A + xC ) = 0°0'0' ' ,43
ε AC = A
6 ⋅ ρCA ⋅ RN CA
E − EB
= 330°11'14' ' ,55
ϑ'BA = arctg A
N
N
−
A
B
y
y
x
2
( − A )( B + x A ) 0 0'0' ' ,79
ε BA = B
=− °
6 ⋅ ρ AB ⋅ RN AB
E − EC
= 232°14'0' ' ,01
ϑ'CB = arctg B
N
N
−
B
C
y
y
x
2
( − B )( C + x B ) = 0°0'0' ' ,91
ε CB = C
6 ⋅ ρ BC ⋅ RN BC
Si ha che l’eccesso sferico 3ε vale:
3ε = ε AC − ε AB + ε CB + ε CA + ε BA − ε BC = 1,76"
come è anche verificabile sulla sfera locale con il teorema di Legendre:
3ε =
S
R2
D’altra parte, ciò che compare al numeratore della sommatoria delle correzioni
angolari alle corde delle trasformate, non è nient’altro che tre volte la
superficie del triangolo espressa con la formula di camminamento di Gauss.
69
CARTOGRAFIA
Tab.3.1 – Correzioni in metri da aggiungere alle coordinate dei punti
nella rappresentazione Gauss-Boaga (Roma 1940), per ottenere le
coordinate degli stessi punti nel sistema UTM ED50.
FOGLIO N° COORDINATA NORD
FUSO
1
1A
2
3
4
4A
4B
4C
5
5A
6
7
8
9
10
11
12
13
14
14A
3269
15
16
17
18
19
20
21
22
23
24
25
26
26A
27
28
29
30
31
32
33
34
35
36
37
38
39
40
70
+171
171
175
174
173
173
172
179
179
178
177
176
175
175
174
174
179
179
178
177
177
176
175
175
175
181
181
180
179
179
178
178
177
177
176
176
176
32
FUSO
+167
168
168
169
169
169
168
167
170
170
170
169
168
171
171
170
COORDINATA EST
33
FUSO
32
-999948
949
945
946
947
948
949
944
944
945
945
945
946
947
948
948
944
944
944
945
946
946
947
948
948
945
945
945
945
945
945
945
946
946
947
948
948
FUSO
33
-2019936
936
936
935
935
934
934
933
935
934
934
933
933
935
935
934
(continua)
CARTOGRAFIA
FOGLIO N° COORDINATA NORD
FUSO
(continua)
40A
40B
41
42
43
44
45
46
47
48
49
50
51
52
53
53A
53B
53C
54
55
56
57
58
59
60
61
62
63
64
65
65A
65B
66
67
68
69
70
71
72
73
74
75
76
77
77A
77B
78
79
32
FUSO
COORDINATA EST
33
FUSO
32
169
169
+181
180
179
179
178
178
178
177
177
177
176
182
181
180
180
180
179
179
179
178
178
178
177
182
182
181
181
181
180
180
180
180
179
179
179
183
182
+172
171
171
170
170
170
173
172
171
175
174
173
FUSO
33
-2019934
934
-999946
946
945
945
945
945
946
947
947
948
948
947
946
946
945
945
945
946
946
947
947
948
949
947
946
946
945
945
946
946
946
947
947
948
948
935
935
935
935
935
935
936
936
936
936
936
936
947
947
71
CARTOGRAFIA
Tab.3.1
FOGLIO N° COORDINATA NORD
FUSO
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125
126
127
128
129
72
181
181
181
181
+181
181
181
181
180
180
182
182
181
181
181
181
181
181
181
181
181
182
181
182
182
182
182
182
183
184
183
183
183
184
184
184
184
184
184
184
184
32
FUSO
+176
177
177
177
178
177
178
178
178
178
179
179
180
180
COORDINATA EST
33
FUSO
32
-999946
946
946
946
946
946
947
948
948
949
947
947
946
946
946
946
946
946
947
948
949
947
947
947
948
948
948
949
948
949
949
949
949
948
949
948
949
948
948
948
948
FUSO
33
-2019936
936
936
936
936
937
936
936
937
938
936
936
938
939
(continua)
CARTOGRAFIA
FOGLIO N° COORDINATA NORD
FUSO
(continua)
130
131
132
133
134
135
136
137
138
139
140
141
142
143
144
145
146
147
148
149
150
151
152
153
154
155
156
157
158
159
161
162
163
164
165
166
167
168
169
170
171
172
173
174
175
176
177
178
179
180
185
185
185
185
+186
186
187
32
FUSO
180
181
181
181
182
181
+181
182
182
183
182
182
183
183
184
184
183
183
184
184
185
185
185
185
185
184
185
185
185
185
185
186
n.d.
n.d.
n.d.
n.d.
COORDINATA EST
33
FUSO
948
948
949
948
949
949
FUSO
33
-2019936
936
937
938
940
936
936
937
938
940
936
937
938
938
940
940
936
937
938
938
939
940
941
940
940
937
938
939
940
941
941
941
n.d.
n.d.
n.d.
n.d.
186
186
186
186
186
186
186
186
187
n.d.
n.d.
32
-999949
938
938
939
940
940
941
941
942
942
n.d.
n.d.
73
CARTOGRAFIA
Tab.3.1
FOGLIO N° COORDINATA NORD
FUSO
181
182
183
184
185
186
187
188
189
190
191
192
193
194
195
196
197
198
199
200
201
202
203
204
205
206
207
208
209
210
211
212
213
214
215
216
217
218
219
220
221
222
223
224
225
226
227
228
229
230
74
32
FUSO
n.d.
n.d.
COORDINATA EST
33
FUSO
32
FUSO
33
n.d.
n.d.
187
186
186
186
186
186
187
187
188
n.d.
n.d.
n.d.
n.d.
-2019938
939
940
941
941
941
942
942
941
n.d.
n.d.
n.d.
n.d.
187
187
187
186
186
186
187
188
+189
n.d.
n.d.
n.d.
n.d.
939
940
942
942
942
942
941
941
940
n.d.
n.d.
n.d.
n.d.
187
187
186
186
188
189
190
n.d.
n.d.
n.d.
n.d.
942
943
942
943
940
940
939
n.d.
n.d.
n.d.
n.d.
186
186
186
186
n.d.
n.d.
n.d.
n.d.
943
943
943
943
n.d.
n.d.
n.d.
n.d.
186
186
186
943
943
944
(continua)
CARTOGRAFIA
FOGLIO N° COORDINATA NORD
FUSO
231
232
233
234
235
236
237
238
239
240
241
242
243
244
245
246
247
248
249
250
251
252
253
254
255
256
257
258
259
260
261
262
263
264
265
266
267
268
269
270
271
272
273
274
275
276
277
32
FUSO
COORDINATA EST
33
FUSO
185
n.d.
n.d.
n.d.
n.d.
32
FUSO
33
-2019944
n.d.
n.d.
n.d.
n.d.
187
186
186
n.d.
n.d.
944
945
945
n.d.
n.d.
188
187
186
190
189
188
188
195
195
+195
194
193
191
190
190
197
197
196
195
195
194
193
191
191
198
197
196
195
195
195
196
195
195
194
195
195
194
945
945
946
942
945
946
946
935
937
938
940
942
944
946
946
934
935
937
939
941
942
944
946
946
936
938
940
941
942
942
940
942
943
943
943
943
943
75
4. STATISTICA
19. Della variabile statistica non ordinata rappresentata dai valori: (3 3 2 4 5 6 4 5 3 4
3 5 6 4 2 5 ) calcolarne media, sqm, radici cubiche e quarte dei momenti del terzo e
quarto ordine della variabile scarto.
Viene di seguito riportata una tabella in cui sono indicati i valori ordinati con
accanto le relative frequenze.
Ni
2
4
4
4
2
xi
2
3
4
5
6
fi
1/8
1/4
1/4
1/4
1/8
Verranno ora calcolate la media e lo scarto quadratico medio.
m = M [x ] =
∑x
i
1
1
1
1
1
⋅ f i = 2 ⋅ +3 ⋅ + 4 ⋅ + 5 ⋅ + 6 ⋅ = 4
8
4
4
4
8
sqm = S 2 (x )
dove:
S 2 (x ) =
1
⋅
N
(∑ N
i
)
⋅ xi2 − m 2 =
(
)
1
⋅ 2 ⋅ 2 2 + 4 ⋅ 3 2 + 4 ⋅ 4 2 + 4 ⋅ 5 2 + 2 ⋅ 6 2 − 16 = 1,5
16
sqm = S 2 (x ) = 1,5 = 1, 225
Sono ora determinate le radici cubiche e quarte dei momenti del terzo e quarto
ordine della variabile scarto:
[
]
M (x − m ) =
3
2 ⋅ (2 − 4 ) + 4 ⋅ (3 − 4) + 4 ⋅ (5 − 4) + 2 ⋅ (6 − 4)
=0
16
3
3
3
3
77
STATISTICA
[
2 ⋅ (2 − 4 ) + 4 ⋅ (3 − 4 ) + 4 ⋅ (5 − 4 ) + 2 ⋅ (6 − 4 )
= 4,5
16
]
4
M (x − m ) =
4
4
4
4
e quindi la radice cubica del momento del III ordine è pari a zero mentre quella
di quarto risulta pari a:
( [
])
4 M (x − m )4 / n = 1,4565
20. Calcolare la media e lo scarto quadratico medio della variabile continua f(x)=e-x
definita nel semiasse positivo dei reali, scrivere la variabile z standardizzata e
verificare il teorema di Tchebycheff per λ=2 e λ=3.
Per definizione la media vale:
+∞
M [x ] = µ x = ∫ x ⋅ f (x )dx
0
+∞
a
µ x = ∫ x ⋅ e − x dx = lim a→+∞ ∫ x ⋅ e − x dx =
0
0
[
[e (− 1 − x )] =
− e ] = lim
[e (− 1 − a ) − e (− 1 − 0)] = 1
= lim a→+∞ − x ⋅ e
= lim a→+∞
−x
−x a
0
−a
a → +∞
−x
a
0
0
Verrà di seguito calcolato lo scarto quadratico medio
σ 2 (x ) = ∫
+∞
0
2
(x − µ x )
= lim a → +∞
⋅ f (x )dx = ∫
0
2
∫ (x − 1) e
a
0
+∞
−x
2
2
+∞
(x − µ x ) e − x dx = ∫0 (x − 1) e − x dx =
[
dx = lim a → +∞ − (x − 1) e − x − 2(x − 1)e − x − 2e − x
2
]
a
0
=1
σ = σ 2 (x ) = ±1
La variabile standardizzata z vale:
z=e
− x −µ x
σ
x
=e
− x −1
1
Verifichiamo in ultimo il teorema di Tchebycheff per λ=2 e λ=3:
Questo teorema afferma che P ( x − x ≤ 1 x ) ≥ 1 −
x − µ x ≤ 2σ x
⇒
78
⇒
1
− 2σ x ≤ x − µ x ≤ 2σ x
µ x − 2σ x ≤ x ≤ 2σ x + µ x
⇒
−1 ≤ x ≤ 3
2
e quindi per λ=2 si ha:
STATISTICA
ovvero deve essere:
P(−1 ≤ x ≤ 3) ≥ 1 −
1
λ2
poiché f(x) è definita nel semiasse positivo, la probabilità P sarà:
3
P( x) =
∫e
−x
[
dx = − e − x
]
3
0
= −e − 3 + 1
0
e quindi la condizione di verifica dovrà essere:
1−
1
1
≥ 1−
3
4
e
⇒
0,95 ≥ 0,75
teorema verificato
0,98 ≥ 0,88
teorema verificato
analogamente per λ=3 si avrà:
1−
1
1
≥1−
4
9
e
⇒
21. Sia data una variabile statistica i cui valori sono raggruppati in classi:
10 − 12 12 − 15 15 − 20 20 − 30 30 − 50
0,18
0,40
0,20
0,18
0,04
Si riportino in una tabella le ampiezze degli intervalli, le densità di frequenza e le
frequenze cumulate.
Si disegnino l’istogramma e la funzione cumulativa di frequenza.
Si calcolino valore medio e scarto quadratico medio.
Si calcoli il momento del terzo ordine rispetto ad m.
Xi
10-12
12-15
15-20
20-30
30-50
fi
0,04
0,18
0,40
0,20
0,18
fi cumulate
0,04
0,22
0,62
0,82
1,00
Verrà di seguito determinato l'istogramma.
h1 =
0,04
0,18
0,40
= 0,02 ; h2 =
= 0,06 ; h3 =
= 0,08
2
3
5
79
STATISTICA
h4 =
0,20
0,18
= 0,02 ; h5 =
= 0,009
10
20
Il diagramma riportato è qualitativo.
0.08
0.06
0.02
0.02
0.009
10
12
20
15
50
30
Verranno ora calcolate la media e lo scarto quadratico medio
m = M [x ] = ∑ xi ⋅ f i =[(10 + 12)/ 2]⋅ 0,04 + [(15 + 12 )/ 2]⋅ 0,18 + [(15 + 20)/ 2]⋅ 0,4 +
+ [(30 + 20) / 2]⋅ 0,2 + [(50 + 30 )/ 2]⋅ 0,18 = 22,07
σ = S 2 (x ) = ±9,277
dove:
[
S 2 ( x ) = M (x − m )
2
] = ∑ (x
− M [x ]) ⋅ f i
2
i
S 2 ( x) = (11 − 22,07 ) ⋅ 0,04 + (13,5 − 22,07 ) ⋅ 0,18 + (17,5 − 22,07 ) ⋅ 0,4 + (25 − 22,07 ) ⋅
2
2
2
2
⋅ 0,2 + (40 - 22,07) 2 ⋅ 0,18 = 86,0601
Calcoliamo infine il momento del terzo ordine rispetto ad m:
[
]
M (x − m ) = 0,04 ⋅ (11 − 22,07 ) + 0,18 ⋅ (13,5 − 22,07 ) + 0,4 ⋅ (17,5 − 22,07 ) +
3
3
3
+ 0,2 ⋅ (25 − 22,07 ) + 0,18 ⋅ (40 − 22,07 ) = 836,85
3
3
22. Considerando il fenomeno che ai tempi t = 1,2,3....10 vale:
x = 2,4,5,7,8,9,12,10,14,17
ed il fenomeno che per gli stessi tempi vale:
y = -4,-2,-1,-1,0,1,2,4,4,6
80
3
STATISTICA
si chiede di calcolare l’indice di correlazione lineare.
1
2
-4
t
x
y
2
4
-2
3
5
-1
4
7
-1
5
8
0
6
9
1
7
12
2
8
10
4
9
14
4
10
17
6
Per verificare se fra i due fenomeni esiste correlazione lineare bisogna
calcolare l’indice di correlazione lineare ricordando che se tale indice assume
un valore uguale a zero i due fenomeni sono incorrelati mentre se assume
valore ± 1, i due fenomeni si dicono perfettamente correlati linearmente.
L’indice di correlazione lineare è definito dalla seguente formula:
ρ xy =
σ xy
σ x ⋅ σy
Si calcolano allora in primo luogo le medie delle due variabili:
n
µx =
∑x
=
2 + 4 + 5 + 7 + 8 + 9 + 12 + 10 + 14 + 17
= 8,8
10
=
− 4 − 2 −1 −1+ 0 +1 + 2 + 4 + 4 + 6
= 0,9
10
i
i =1
n
n
µy =
∑y
i =1
n
i
Successivamente si calcolano le varianze e quindi gli scarti quadratici medi
delle rispettive variabili.
Volendo costruire la tabella che descrive la variabile doppia occorre considerare che
fij = 0 per i diverso da j.
x
2
4
5
ecc.
y
0
0
0
− 4 1 / 10
0 1 / 10
0
0
−2
0
0 1 / 10 0
−1
0
0
0
−1
ecc.
Per i =j si ha fij = 1/n.
σ x2 =
1 n
2
⋅ ∑ ( yi − µ x ) = 19,4 ⇒ σ x = σ x2 = 4,4
n i =1
σ 2y =
1 n
2
⋅ ∑ (y i − µ y ) = 8,69
n i =1
81
STATISTICA
σ y = σ y2 = 2,948
Infine si calcola la covarianza fra le due variabili con la formula:
1 n
⋅ ∑ (xi − µ x )(y i − µ y ) = 12,38
n i =1
σ xy =
Dai singoli passaggi si sono ottenuti i valori riporatati in tabella:
t
(x-Mx)^2
(y-My)^2
(x-Mx)· (y-My)
1
2
3
46,24
24,01
33,32
23,04
8,41
13,92
14,44
3,61
7,22
4
5
6
3,24
3,61
3,42
0,64
0,81
0,72
0,04
0,01
0,02
7
10,24
1,21
3,52
8
1,44
9,61
3,72
9
10
Tot.
27,04
9,61
16,12
67,24
26,01
41,82
193,6
86,9
123,8
Infine:
ρ xy =
σ xy
σx ⋅ σy
= 0,954461
Dal risultato ottenuto si può dedurre che i due fenomeni sono fortemente
correlati poichè il valore assunto dall’indice di correlazione è prossimo ad 1.
23. Di un appezzamento triangolare si misurano le coordinate con un digimetro: le
coordinate in metri valgono A(-3, 2); B(-3, 4); C(6, -2).
Sapendo che entrambe le coordinate (e per tutti i punti) lo scarto quadratico medio di
acquisizione e’ di ± 0,05 m:
valutare con la formula di Gauss la superficie media dell’appezzamento;
valutare lo scarto quadratico medio della superficie;
ricavare l’espressione dello scarto quadratico medio di una qualunque superficie
misurabile attraverso le coordinate dei suoi vertici.
Y
C
A
X
B
82
STATISTICA
Numerando i vertici dell’appezzamento e percorrendoli in senso orario la
formula del camminamento di Gauss è la seguente:
1 3
∑ yi ( xi−1 − xi+1 )
2 i =1
1
S = ( y A ⋅ ( x B − xC ) + yC ⋅ ( x A − x B ) + y B ⋅ ( xC − x A ))
2
1
S = (2 ⋅ ( −3 − 6) − 2 ⋅ ( −3 + 3) + 4 ⋅ (6 + 3)) = 9 m 2
2
S=
Si valuta ora lo scarto quadratico medio della superficie:
2
2
2
2
∂S 2
∂S 2
∂S 2
∂S 2
∂S
σ x A +
σ y A +
σ x B +
σ y B +
σ 2 s =
∂x A
∂y A
∂xB
∂yB
∂xC
2
2
σ xC
∂S
+
∂yC
2
2
σ y C
2
2
2
2
2
1 ( yC − y B ) + ( xB − xC ) + ( y A − yC ) + ( xC − x A ) + ( y B − y A ) + 2
σ =
⋅σ
4 + ( x A − x B ) 2
2
S
= 0,13625 m 4
σ S = ±0,37 m 2
S = (9,0 ± 0,37) m 2
Prendiamo ora una figura chiusa qualsiasi, la superficie, secondo la formula del
camminamento, vale:
1 n
S = ∑ y i ( xi −1 − x i +1 )
2 i =1
Y
2
3
1
4
6
5
X
Le derivate parziali secondo yi valgono:
83
STATISTICA
∂S 1
1
= (x i − 1 − x i + 1 ) = − ∆x
2
∂y i 2
Con un poco più di attenzione è facile ricavare le derivate rispetto alle variabili
xi che valgono:
∂S 1
1
= ( y i + 1 − y i − 1 ) = ∆y
∂x i 2
2
La varianza della superficie si ricava dalla formula di propagazione:
σ S2 =
1 n
1 n
∑ ∆x 2σ x2 + ∑ ∆y 2σ 2y
4 i =1
4 i =1
σ S2 =
σ2 n
∑ ∆x 2 + ∆y 2
4 i =1
ma
σx =σy =σ
cioè:
σS =
σ
2
∑l
2
i
σ
2
∑l
2
i
cioè:
σS =
avendo chiamato li le lunghezze dei lati del perimetro del poligono.
24. Di un campo triangolare si sono misurati con una bindella metrica (nastro
d’acciaio) i tre lati. Questi valgono: a = 29,52m; b = 39,64m; c = 49,77m; tutte le
misure hanno sqm di ± 1 cm.
Ricavare il valore della superficie media del campo.
Ricavare lo sqm della superficie precedentemente ricavata.
a
b
c
84
STATISTICA
La formula di Erone per l’area di un triangolo qualunque dati i tre lati può
essere scritta:
p( p − a )( p − b)( p − c)
S=
dove:
p=
a+b+c
2
Applicando la formula ai valori medi, per il teorema della media si ha:
S = 585,0236 m2
L’espressione di Erone può anche essere scritta:
(a + b + c ) (a + b + c − 2a ) (a + b + c − 2b) (a + b + c − 2c )
S=
2
2
2
(a + b + c ) (b + c − a ) (a + c − b) (a + b − c )
2
2
2
2
S=
S=
2
(ab + ac − a 2 + b 2 + bc − ab + bc + c 2 − ac )
⋅
16
(a 2 + ab − ac + bc + ac − c 2 − ab − b 2 + bc)
⋅
16
(b 2 − a 2 + c 2 + 2bc)(a 2 − b 2 − c 2 + 2bc )
S=
16
2a 2 b 2 + 2a 2 c 2 + 2b 2 c 2 − a 4 − b 4 − c 4
S=
S=
16
1
4
2a 2 b 2 + 2a 2 c 2 + 2b 2 c 2 − a 4 − b 4 − c 4
Ponendo:
2
A = ( 2a b
2
+ 2a 2 c 2 + 2b 2 c 2 − a 4 − b 4 − c 4 )
derivando si ottiene:
∂S 1 1 1
= ⋅ ⋅
⋅ (4ab 2 + 4ac 2 − 4a 3 ) = 20,0382
∂a 4 2 A
85
STATISTICA
∂S 1 1 1
= ⋅ ⋅
⋅ (4a 2 b + 4bc 2 − 4b 3 ) = 15,0518
∂b 4 2 A
∂S 1 1 1
= ⋅ ⋅
⋅ (4a 2 c + 4b 2 c − 4c 3 ) = −0,3647
∂c 4 2 A
e quindi:
2
2
2
∂S
∂S
∂S
σ = σ 2a + σ b2 + σ 2c = 0,06282 m 4
∂a
∂b
∂c
2
S
σ S = ±0,25065 m 2
Il valore della misura S si scrive in questo modo:
S = (585,0 ± 0,25) m 2
25. Di un triangolo ABC si conoscono:
i vertici A ≡ (4, 5) e B ≡ (11, 2);
gli angoli corrispondenti a questi vertici α = 90 gon ± 0,1 gon e β = 40 gon ± 0,1 gon.
Tracciare il grafico del triangolo e ricavare:
1. le coordinate del vertice C;
2. la matrice di varianza covarianza delle coordinate del punto C;
3. lo scarto quadratico medio delle due coordinate di C;
4. i semiassi principali dell'ellisse d'errore sul punto C;
5. lo scarto quadratico medio della superficie del triangolo ABC.
Punto 1
Per calcolare le coordinate del punto C sono necessari alcuni dati facilmente
ricavabili tramite delle osservazioni sulla figura. In modo particolare valutiamo
l’ampiezza dell’angolo δ: soltanto dopo aver ricavato l’equazione della retta
passante per i punti A e B tramite la nota formula:
y −Y A =
Y B −Y A
(x − X A )
XB −X A
dalla quale appunto si ricava che:
y =
(2 − 5)
(2 − 5)
⋅4+5
x−
(11 − 4 ) (11 − 4)
= −
3
7
x+
47
7
A questo punto, noto il coefficiente angolare di questa retta, risulta semplice
calcolare l’angolo cercato:
86
STATISTICA
3
δ = arctg − = −25,77621 gon
7
Per calcolare la lunghezza del segmento AB è invece sufficiente applicare il
teorema di Pitagora per cui:
AB =
( X B − X A ) 2 + (Y B − Y A ) 2 =
58
Infine si ricorda che:
γ
g
= 200 g − (α g + β g )
Ora, prendendo in considerazione il triangolo ABC ed applicando il teorema
dei seni, si ha che:
AB
AC
=
senγ senβ
da cui:
AC =
AB
AB
senβ =
senβ
g
senγ
sen[200 − (α + β)]
e per note proprietà dei seni:
AC =
AB
senβ
sen (α + β)
Riferendoci ora al triangolo AHC si osserva che:
X C = X A + AC cos(α − δ ) = X A +
AB
senβ cos(α − δ ) = 6,68
sen (α + β)
Analogamente per calcolare l’ordinata del punto C:
YC = YA + AC sen (α − δ ) = Y A +
AB
sen β sen (α − δ ) = 9, 25
sen (α + β)
Per i calcoli che dovremo fare in seguito è utile esprimere le stesse relazioni nel
seguente modo:
Ricordando inoltre che:
cos δ cot α + sen δ
AB
(cos α cos δ + sen δ senα) = X A + AB ⋅
senα cot β + cos α
cot β + cot α
cos δ − sen δ cot α
AB
YC = YA +
(senα cos δ − sen δ cos α) = YA + AB ⋅
senα cot β + cos α
cot β + cot α
XC = X A +
avendo utilizzato le relazioni:
87
STATISTICA
cos(α −|δ|) = cos α cos|δ|+ sen α sen|δ|
sen(α + β) = sen α cos β + sen β cos α
sen(α −|δ |) = sen α cos|δ |− sen|δ |cos α
N.B. Per avere una conferma dei risultati trovati si può procedere per un’altra
via, utilizzando le equazioni cartesiane delle rette.
Per quanto riguarda la retta passante per i punti A e C consideriamo la sua
espressione generale nella forma:
y = mx + q
Il coefficiente angolare m è facilmente ricavabile dopo aver calcolato l’angolo
δ; si ha infatti:
m = tan(α − | δ |) = 1,59
che, sostituito nell’espressione generale sopra riportata, fornisce il parametro q:
5 = (1,59)4 + q da cui q = −1,35
Si ha dunque che l’equazione della retta passante per i punti A e C è:
y = (1,59) x − 1,35
Analogamente per la retta passante per i punti B e C si ha l’espressione
generale:
y = m' x + q'
e seguendo lo stesso procedimento poc’anzi descritto si ha che:
m' = tan[200 g − (β+ | δ |)] = −1,68
2 = (−1,68)11 + q ' da cui q' = 20,45
Si ha perciò che l’equazione della retta passante per i punti B e C è:
y = (−1,68) x + 20,45
A questo punto le coordinate del punto C sono facilmente ricavabili tramite
l’intersezione delle rette appena trovate:
y = (1,59) x − 1,35
y = (−1,68) x + 20,45
88
y = (1,59) x − 1,35
(1,59) x − 1,35 = (−1,68) x + 20,45
STATISTICA
X C = 6,68
YC = 9,25
Punto 2
Per semplicità si definiscono con fX(α,β) e fY(α,β) le funzioni in α e β che
danno rispettivamente l’ascissa e l’ordinata del punto C, le cui espressioni sono
state ricavate al punto precedente. Inoltre noto che σα2 = σβ2 = σ2 = 0,01gon2 =
1,57 ⋅ 10-4rad2, definisco:
X
α
ε = C ; µ =
β
Y C
con ε = g (µ ) , dove la funzione g è rappresentata dalle espressioni delle
coordinate XC ed YC precedentemente trovate.
Essendo α e β statisticamente indipendenti avremo che la loro covarianza è
nulla, mentre la matrice di varianza covarianza sarà:
C µµ
σ 2 0
=
0 σ 2
Per potere calcolare la matrice di varianza covarianza delle coordinate del
punto C definisco la matrice disegno:
∂f X (α , β )
∂g
∂α
A = =
∂
f
∂µ Y (α , β )
∂α
∂f X (α , β )
∂β
∂f Y (α , β )
∂β
dove:
cos | δ |
1
−
(cot α + cot β ) + (cos | δ | cot α + sen | δ |)
2
∂f X (α , β )
sen 2α =
= AB sen α
2
(cot α + cot β )
∂α
AB (sen | δ | − cos | δ | cot β )
=
= −2,89
sen 2α (cot α + cot β ) 2
− (cos | δ | cot α + sen | δ |)
1
sen 2 β
∂f X (α , β )
= AB
=
∂β
(cot α + cot β ) 2
AB (cos | δ | cot α + sen | δ |)
=−
= −5,05
sen 2 β (cot α + cot β ) 2
89
STATISTICA
1
sen | δ |
(cot α + cot β ) + (cos | δ | − sen | δ | cot α )
2
∂f Y (α , β )
sen 2α =
= AB sen α
2
(cot α + cot β )
∂α
AB (sen | δ | cot β + cos | δ |)
=
= 4,84
sen 2α (cot α + cot β ) 2
− (cos | δ | − sen | δ | cot α )
1
sen 2 β
∂f Y (α , β )
= AB
=
(cot α + cot β ) 2
∂β
AB (cos | δ | −sen | δ | cot α )
=−
= −8,02
sen 2 β (cot α + cot β ) 2
Si ha pertanto che la matrice di varianza covarianza delle coordinate del punto
C è data da:
− 2,89 − 5,05 σ 2 0 − 2,89 4,84
T
=
C εε = AC µµ A =
2
4,84 − 8,02 0 σ − 5,05 − 8,02
− 2,89σ 2 − 5,05σ 2 − 2,89 4,84
=
=
2
2
5
,
05
8
,
02
−
−
4
,
84
8
,
02
σ
−
σ
(−2,89) 2 σ 2 + (−5,05) 2 σ 2
=
2
2
(−2,89)(4,84)σ + (−5,05)(−8,02)σ
(−2,89)(4,84)σ 2 + (−5,05)(−8,02)σ 2
(4,84) 2 σ 2 + (−8,02) 2 σ 2
In definitiva si ha che:
5,32 ⋅ 10 −3 4,16 ⋅ 10 −3
C εε =
−3
−3
4
,
16
10
13
,
78
10
⋅
⋅
Punto 3
Per calcolare lo scarto quadratico medio delle coordinate del punto C si può
usare la matrice di varianza covarianza appena ricavata.
Le varianze delle coordinate x ed y sono riportate nella diagonale principale.
Basta eseguirne la radice quadrata.
σ X C = ±7.29 ⋅ 10 −2 m ; σ YC = ±11,74 ⋅ 10 −2 m
Per calcolare lo scarto quadratico medio delle coordinate del punto C era anche
sufficiente applicare la formula:
2
∂f 2
∂f ∂f
σ = ∑
σ x2ij
σ x i + 2∑ ∑
i ∂x i
i
j ∂x i ∂x j
2
y
90
STATISTICA
Essendo nel nostro caso, come già affermato in precedenza, statisticamente
indipendenti le variabili α e β, il secondo addendo risulta nullo.
L’espressione per trovare la varianza dell’ascissa del punto C risulta perciò:
2
∂f (α , β ) 2 ∂f X (α , β ) 2
= X
σ +
σ
∂α
∂β
2
σ
2
XC
Quella per trovare la varianza dell’ordinata del punto C invece è:
2
∂f (α , β ) 2 ∂f Y (α , β ) 2
= Y
σ +
σ
∂α
∂β
2
σ
2
YC
Le derivate parziali all’interno di queste due espressioni sono già state risolte al
punto 2 e quindi è possibile ricavare:
σ 2X C = (− 2,89) (1,57 ⋅ 10 −4 ) + (− 5,05) (1,57 ⋅ 10 −4 ) = 5,32 ⋅ 10 −3
2
2
da cui:
σ X C = ±7,29 ⋅ 10 −2
σ Y2C = (4,84) (1,57 ⋅ 10 −4 ) + (− 8,02) (1,57 ⋅ 10 −4 ) = 13,78 ⋅ 10 −3
2
2
da cui:
σ YC = ±11,74 ⋅ 10 −2
Punto 4
Una volta note le varianze e la covarianza delle coordinate del punto C, per
calcolare i semiassi d’ellisse di errore riferito a questo punto è sufficiente
applicare le seguenti formule:
(
)
(
)
a2 =
1 2
σ X C + σ Y2C + (σ Y2C − σ 2X C ) 2 + 4σ 2XY = 15,48 ⋅ 10 −3
2
b2 =
1 2
σ X C + σ Y2C − (σ Y2C − σ 2X C ) 2 + 4σ 2XY = 7,23 ⋅ 10 −3
2
dove σXY è la covarianza delle coordinate del punto C.
91
STATISTICA
Punto 5
Per calcolare l’area del triangolo ABC, dati due angoli e un lato si utilizza:
A A BC
| A B |2 sen α sen β
=
2 sen(α + β )
Indicando con Ψ(α,β) la funzione appena trovata e ricordando ancora che le
variabili α e β sono statisticamente indipendenti, la varianza della superficie
del triangolo ABC si può ricavare applicando la formula:
2
∂Ψ (α, β) 2 ∂Ψ (α, β) 2
σ =
σ
σ +
∂α
∂β
2
2
A
Calcolate le derivate parziali ed inserendole all’interno di questa espressione si
ottiene:
2
2 | AB |2 cos αsenβsen (α + β ) − 2(| AB |2 senαsenβ ) cos(α + β ) 2
σ =
σ +
4sen 2 (α + β )
2
A
2
2 | AB |2 senα cos βsen (α + β ) − 2(| AB |2 senαsenβ ) cos(α + β ) 2
+
σ =
4sen 2 (α + β )
4
2
| AB | σ
=
[senβ (cos αsen (α + β ) − senα cos(α + β ) )]2 +
4
4sen (α + β )
{
}
+ [senα (cos βsen (α + β ) − senβ cos(α + β ) )] =
2
=
| AB | σ
{[senβ (− sen(α − α − β ))]2 + [senα (− sen ( β − α − β ))]2 }=
4
4 sen (α + β )
4
2
| AB |4 σ 2
(sen 4α + sen 4 β )
=
4
4 sen (α + β )
Sostituendo i valori noti di |AB|, α, β e σ2 si ottiene che:
σ 2A = 0,22 da cui σ A = ±0,47 m2
92
5. IL PROGRAMMA DI COMPENSAZIONE CALGE
CALGE
− simula una rete e consente di valutare a priori la precisione ottenibile
con un dato schema di misure
− compensa a «minimi quadrati» la più generale rete topografica
(planimetrica, altimetrica, plano – altimetrica e fotogrammetrica)
fra le misure topografiche elaborabili troviamo:
− direzioni azimutali
− azimut
− distanze inclinate o ridotte
− distanze zenitali
− dislivelli
L’ambito di applicazione del programma è il «campo topografico» perchè si
assume come superficie di riferimento:
il piano tangente per la planimetria
la sfera locale per l’altimetria
Descrizione dei dati di INPUT
L’Input del programma CALGE è costituito dai seguenti files:
file nomefile. U01 contiene le misure topografiche
file nomefile. U02 contiene i valori approssimati delle incognite
file nomefile. U05 contiene i parametri generali
93
IL PROGRAMMA DI COMPENSAZIONE
nomefile.U01-misure topografiche
Ogni record è formato da 132 caratteri e contiene in sequenza:
variabile
nI nII
unità di misura
θI
gon
σθ
cc
θII
gon
σθ
dI
cc
I
s.q.m. della misura θI
direzione azimutale misurata con stazione in nII
m
mm, mm/km
s.q.m. della misura θII
distanza misurata dalla stazione nI
costanti del distanziometro ad onde
m
distanza misurata dalla stazione nII
σdII
mm, mm/km
costanti del distanziometro ad onde
ζ
gon
distanza zenitale misurata in nI
σζ I
cc
s.q.m. della distanza zenitale ζI
ζII
gon
distanza zenitale misurata in nII
σζ II
hI
hII
aI
cc
aII
T
m
II
σd
dII
I
I
V
94
significato
nomi dei punti a cui si riferisce la misura
(devono essere numeri interi)
direzione azimutale misurata con stazione in nI
m
m
m
s.q.m. della distanza zenitale ζII
altezza strumentale misurata in nI
altezza strumentale misurata in nII
altezza del segnale collimato da nI
altezza del segnale collimato da nII
opzione (spiegata oltre) può valere:
: = misura di un azimut
* = distanza da ridurre con ζ
+ = dist. da ridurre con ∆q
# = altro
= = altro
opzione può valere:
A = vincolo di un azimut
B = vincolo di una base (distanza piana)
C=A+B
D = vincolo di un dislivello
IL PROGRAMMA DI COMPENSAZIONE
Esempio
Tipo di variabile e colonne impegnate da ciascuna variabile
nI
nII
θI
σθI
1 – 5 6 – 10 11 – 20
21 – 25
41 – 50
σdI
[mm/km]
σdI
[mm]
dI
51 – 55
56 – 60
all. DX all. DX
(.)=col. 15 (.)=col. 24
1
1
2
3
252,4670 2,0
331,4213 2,0
1
4
356,2752 2,0
3
5
7
8
6373,596 5,0
9276,155 5,0
1,0
1,0
5
6
8472,386 5,0
1,0
T
V
131 132
(.)=col. 46 (.)=col. 54 (.)=col. 59
Per le livellazioni geometriche:
variabile
unità di
misura
nI nII
∆q’
σ∆q’
∆q’’
σ∆q’’
d
V
m
mm
m
mm
km
significato
nomi dei punti a cui si riferisce la misura (devono essere
numeri interi)
dislivello misurato da nI a nII
s.q.m. chilometrico di ∆q’
dislivello misurato da nII a nI
s.q.m. chilometrico di ∆q’’
sviluppo lineare del tratto nI nII
opzione (spiegata oltre) può valere : ‘ ‘ o ‘D’
Esempio
Tipo di variabile e colonne impegnate da ciascuna variabile
nI
1 – 5
nII
∆q’
6–10 11 – 25
all. DX
all. DX (.)=col. 20
1
2
3
2
3
1
3,2550
-2,1430
-1,1150
σ∆q’
26 – 30
∆q’’
31 - 45
d
σ∆q’’
46 - 50 51 – 60
(.)=col. 57
1,0
1,0
1,0
0,5
1,0
1,0
95
IL PROGRAMMA DI COMPENSAZIONE
nomefile.U02-valori approssimati delle incognite
variabile
unità di
misura
significato
nome
nome del punto
vincolo
X
0 = da compensare
1 = fisso in quota
2 = fisso in planimetria
valore approssimato della coordinata X
se specificato è lo s.q.m. di X
m
mm
σX
Y
m
σY
Z
valore approssimato della coordinata Y
mm
se specificato è lo s.q.m. di Y
σZ
m
mm
valore approssimato della coordinata Z
se specificato è lo s.q.m. di Z
∆
gon
valore approssimato dell’orientamento della stazione
Eempio
Tipo di variabile e colonne impegnate da ciascuna variabile
nome vincolo
X
σX
Y
σY
Z
σZ
∆
1 – 5 6
all. DX
11 – 25
26-35
36 – 50
51-60
61 – 75
76 – 85 86 – 95
(.)=col. 21 (.)=col. 34 (.)=col. 46 (.)=col. 59 (.)=col. 70 (.)=c.83 (.)=c. 90
1
0
24310.
4994590.
0,00
2
0
19620.
4990270.
335,00
3
2
16159.
4999013.
265,00
4
0
18960.
5001160.
30,00
5
0
13450.
5005145.
365,00
6
0
17550.
5010520.
60,00
96
IL PROGRAMMA DI COMPENSAZIONE
nomefile.U05-parametri generali
Contiene 6 record da 80 caratteri
n° record variabile
1
TITOLO
2
ISCRI
IFILE
IMATR
ISIMU
3
ITIPO
ITOPO
IFOTO
ISOLU
4
5
6
valore
=0
=1
=1
=0
=0
=1
=2
=0
=1
=1
=2
=3
=1
=2
=3
=0
=1
=0
=1
C0
C1
C2
C3
C4
C5
C6
C7
RA
RF
K0
LS
descrizione
stringa di intestazione del lavoro
stampa standard
stampa anche i dati di input
salva i risultati nei files .U11 .U12 .U13 .U14 .U15 .U16
non salva
input/output standard
legge dall’unità 10
scrive sull’unità 10
compensazione standard
calcolo di simulazione
rete topografica
blocco fotogrammetrico
rete altimetrica
rete planimetrica
rete plano - altimetrica
blocco a modelli indipendenti
blocco a stelle proiettive
calcolo della soluzione con Cholesky
calcolo con gradiente coniugato
sigma zero a priori della compensazione in [cc o mm/√km]
s.q.m. a priori delle direzioni azimutali in [cc]
parte fissa dello s.q.m. delle distanze in [mm]
parte proporzionale alla distanza (C3 * D ) in [mm/km]
s.q.m. a priori delle distanze zenitali in [cc]
s.q.m. a priori dei dislivelli in [mm/√km]
s.q.m. a priori delle misure fotogrammetriche in [µmm]
s.q.m. a priori delle coordinate dei punti in altri sistemi di rif.
raggio terrestre
indice di rifrazione
origine della numerazione dei vertici
passo di numerazione
I dati di questo file sono IN FORMATO LIBERO.
Esempio
RETE DEL FREJUS - RILIEVO
0
1
0
1
2
0
10
1
5
6374972.867
0
1
0
0
1
0.14
10
10
1
999
97
6. MINI-SERIE DI ISTRUZIONI PER L'USO DI CALGE
AL LAIB DI VERCELLI
All'ingresso del LAIB il calcolatore dovrebbe essere già acceso ed impostato
sul disco W:\>; se ciò non fosse occorre accendere l'interruttore e seguire le
richieste che appaiono sul video; in seguito battere W: (comparirà W:\>).
1. Creare la directory TOPOCIV con il comando MD TOPOCIV (ogni
comando presuppone di battere INVIO).
2. Inserirsi nella directory precedente con il comando CD\TOPOCIV.
3. Spostarsi sull'area di lavoro E:\topo con i comandi:
E:
cd\topo
4. Copiare in W: alcuni files con i comandi:
W:
COPY
E:CALGE.EXE
COPY
E:RUN386.EXE
Anche se non direttamente necessari sono ultili altri files da copiare con i
comandi:
COPY E:LIST.*
COPY E:CALGE2XF.EXE COPY E:*.EER
5. Crearsi il file di nome CALGE.INI che contiene il «luogo di lavoro» con
l'editor di sistema e cioè con:
EDIT
CALGE.INI
In questo file deve essere presente la linea: W:\TOPOCIV\
Per uscire battere ALT F, E, SI, INVIO.
Un suggerimento è copiare tale file dal disco E: e poi modificarlo (COPY
E:CALGE.INI).
6. Crearsi il file di nome NOMELAV con l'editor del sistema, cioè con:
EDIT
NOMELAV
In questo file deve essere presente il nome dei files di estensione U01, U02,
U05 dati al lavoro.
99
MINISERIE DI ISTRUZIONI PER L’ USO DI CALGE AL LAIB DI VERCELLI
Se si è deciso ad esempio di chiamare il lavoro «COSENZAE»; deve essere
presente la linea:
COSENZAE
Uscire dal file come al punto 5.
1. Se i files di lavoro di estensione U01, U02 e U05 non sono stati creati
prima (misure, coordinate e parametri) occorre usare come canovaccio i
files COSENZAE.UO* i quali possono essere copiati battendo: COPY
E:\topo\dati\COSENZAE.u0* (ad esempio per il lavoro
COSENZAE). Se il nome del lavoro è, ad esempio «PIPPO», battere REN
COSENZAE.* PIPPO.*; modificare poi i files di estensione U01, U02 e
U05 per inserire le misure, le coordinate e le costanti corrette. Alla fine di
ogni file accertarsi che esista una riga vuota (bianca).
7a. Se si desidera lavorare in ambiente Windows battere WIN e poi entrare in
finestra DOS (DOS prompt). In tal caso occorre ritornare nella directory
W:\TOPOCIV. Questa scelta ha il vantaggio di permettere l’esecuzione più
rapida di CALGE e, nel caso non esista AUTOCAD in versione DOS, si è
già nell’ambiente di lavoro successivo alla compensazione o al progetto
della rete.
2. Battere CALGE, o, eventualmente, nell'esempio citato al punto 6
CALGE>COSENZAE.U06.
In tal modo si ridirige l'output di CALGE sul file COSENZAE.u06.
Per visualizzare l'output nel caso di ridirezione si può usare l'editor di sistema o
il comando LIST.
PER CREARE IL FILE GRAFICO PER IL DISEGNO DELLA RETE
1. Battere W:CALGE2XF
2. Inserire il nome del lavoro (ad esempio COSENZAE)
3. Opzione 4: battere W:\TOPOCIV\
battere W:\ TOPOCIV \
alle due domande del programma
4. Opzione 2: battere ad esempio 0,1 (1m=0,1mm di sqm per ellissi)
5. Opzione 3: battere ad esempio 1, cioè le altezze delle scritte sono 1m in
scala
6. Opzione 1, cioè esegui il programma.
PER VISUALIZZARE E STAMPARE IL DISEGNO CON AUTOCAD
Se esiste Autocad versione MSDOS:
1dos. Battere ACAD e tre volte INVIO
100
MINISERIE DI ISTRUZIONI PER L’ USO DI CALGE AL LAIB DI VERCELLI
2dos. Battere 1 (creazione di un nuovo disegno) ed, alla richiesta del nome,
battere ciò che si era inserito in «NOMELAV», cioè ad esempio
W:\TOPOCIV\COSENZAE
3dos. Battere DXFIN e, alla richiesta del nome del file, scegliere quello che il
programma propone di default battendo INVIO.
4dos. Per stampare sulla stampante laser battere PLOT PLOTTER e 2 volte
INVIO
− N.B. NON verrà stampato direttamente, ma solo dopo l'uscita da
Autocad.
5dos. Dare i vari comandi di Autocad e, alla fine, battere END (INVIO) e 0
(zero) (INVIO) per finire.
6dos. Per tornare in TOPOCIV battere:
CD\TOPOCIV
7dos. Per stampare battere il comando:
COPY/B NOMELAV.PLT
punti precedenti)
LPT3: (NOMELAV è la variabile di cui ai
Se esiste Autocad versione Windows
1win. Cercare l’icona di Autocad (LT o meno) e dare la partenza ad Autocad.
2win. Nel menu FILE, APRI (creazione di un nuovo disegno), selezionare il
file *.DXF (alla richiesta del nome battere ciò che si era inserito in
«NOMELAV», cioè ad esempio W:\TOPOCIV\COSENZAE).
3win. Per stampare sulla stampante si useranno i comandi di Autocad.
4win. Dare i vari comandi di Autocad e, alla fine, battere END (INVIO) e 0
(zero) (INVIO) per finire.
5win. Per tornare in TOPOCIV rientrare in finestra MSDOS e battere
CD\TOPOCIV.
PER SALVARE I LAVORI
In W: battere: Copy NOMELAV.* A:
101
7. GPSEDIT & TURBO TOPAS: MINI-ISTRUZIONI DI AVVIO
Per fare funzionare al LAIB GPS-EDIT e TURBOTOPAS:
Parte preparatoria
Assicurarsi che nel path ci sia la directory c:\windows\command
In ogni caso sarebbe bene dare il comando:
path=c:\windows\command
oppure:
path=%path%+c:\windows\command;
spostarsi sulla radice del disco W:
cd w:\
Crearsi una directory di nome tt con il comando MD tt
Spostarsi su questa directory con il comando CD \tt
Copiare le directory presenti sul disco E: nella directory tt
xcopy e:\topo\tt\*.*/s
TOPAS
Funziona in finestra DOS di Windows 95.
Occorre spostarsi nella directory w:\tt\ e modificare topas.bat con il
comando:
Edit Topas.bat
Nella prima linea la directory di lavoro diventa:
set topas=W:\TT
Uscire dall’editor salvando il file.
Battere TOPAS
Per il planning può essere recuperata una stazione di nome VERCELLI.STA
103
GPSEDIT & TURBO TOPAS: MINI ISTRUZIONI DI AVVIO
GPS-EDIT
Eseguire la parte preparatoria.
Il programma funziona in DOS VERO e quindi occorre battere i bottoni:
Avvio/Chiudi sessione/Riavvia in modalità MS-DOS
Spostarsi in w:\tt con i comandi:
cd w:
cd tt
Occorre inserire prima il driver del mouse con il comando:
MOUSE.EXE
Alcune volte potrebbe essere necessario comunicare il tipo di display. In tal
caso occorre battere:
SET FG_DISPLAY=29H (oppure ad esempio 6AH. I valori si ricavano
battendo: fgmodes)
Nella directory w:\tt battere: GPS-EDIT
Selezionare con il mouse Project e due volte il nome della subdirectory con i
dati.
Battere Project ed Exit per uscire.
104
8. ISTRUZIONI OPERATIVE PER L’USO DI STARNET AL LAIB
All'ingresso del LAIB il calcolatore dovrebbe essere già acceso. Per lanciare il
programma di compensazione di rete topografica STARNET (o di rete di
livellazione STARLEV) selezionare dalla barra degli strumenti di WINDOWS:
Programmi > Starnet Demo (oppure Programmi > Starlev per programma
compensazione rete livellazione).
Viene copiato il programma sul PC locale: il programma si trova ora nella dir:
f:\starnet\
e i dati nella dir:
f:\starnet\starexample\
1. Crearsi il file delle misure e delle coordinate con un nome appropriato.
L’estensione del file deve essere «DAT».
Ciò può essere fatto con l'editor del sistema; in una finestra DOS battere i
comandi :
EDIT FREJUS.DAT
In questo file inserire tutto ciò che serve secondo le istruzioni che seguono.
Per uscire dall’editor di DOS (EDIT), occorre battere ALT F, E, SI,
INVIO.
2. Occorre selezionare le icone: File > New Project ed inserire un nome
identico al file .DAT creato, ad esempio, FREJUS.
3. Occorre selezionare l’editor con File > Set Editor. Di solito si sceglie
Notepad di Windows.
4. Selezionare Input > data file > selezionare FREJUS.DAT ed eventualmente
editarlo se si devono effettuare delle modifiche.
105
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
1. Selezionare le opzioni di progetto (vedi figura seguente) con Option >project: 2D,
le unità metriche e quelle angolari, il sistema locale di coordinate.
2. Selezionare con Options > General, (vedi figura seguente) l’ordine (Est
prima e Nord poi) con cui vengono lette le coordinate.
3. Selezionare con Options > Instruments, (vedi figura precedente) le costanti
di precisione degli strumenti: le due costanti del distanziometro, gli sqm
degli angoli, delle direzioni e degli azimut. È anche possibile inserire un
errore di centramento della stazione e della mira.
106
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
4. Sempre con Options > Listing file, (vedi figura seguente) è possibile
selezionare l’insieme degli elementi che si possono ottenere in fase di
stampa.
5. Alla fine occorre con Run > Adjust Network, (vedi figura seguente)
compensare la rete o, in alternativa, simularla con Preanalysis.
6. L’output alfanumerico è visibile con Output >Listing. Questo output può
essere stampato su una qualunque stampante di sistema o di rete.
7. Il grafo della rete è visibile con Output >Plot. Le dimensioni delle ellissi e le
altre opzioni sono selezionabili agendo sul tasto destro del mouse.
8. Per esportare il grafo in formato DXF occorre selezionare: Tools > DXF
exporter e, dopo aver scelto le dimensioni dei simboli e la scala delle ellissi,
battere Export!.
107
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
Il programma STARNET è in grado di:
− simulare il rilievo di una rete e di valutare a priori la precisione
ottenibile secondo lo schema delle misure previste
− compensare a «minimi quadrati» la più generale rete topografica
(planimetrica, plano – altimetrica o GPS)
Fra le misure topografiche elaborabili troviamo:
− direzioni azimutali
− azimut
− distanze inclinate o ridotte
− distanze zenitali
− basi GPS
Per le reti planimetriche l’ambito di applicazione del programma è il «campo
topografico» perché si assume come superficie di riferimento:
− il piano tangente per la planimetria
− la sfera locale per l’altimetria
Descrizione dei dati di INPUT
L’Input del programma STARNET è costituito da un solo file di estensione
.DAT che contiene le misure topografiche e le coordinate (almeno dei punti
noti) della rete.
I record sono a formato libero, vale a dire non importa come i dati siano
incolonnati e non importa neppure che le misure precedano le coordinate o
viceversa.
Prendiamo come esempio una rete eseguita per il traforo del Frejus visibile
nella figura seguente.
,PERFFR
108
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
A questa rete fa riferimento il file dei dati sottostante (FREJUS.DAT).
La colonna numerica di sinistra non deve essere presente nel file. Qui è stata
riportata solo per facilitarne la comprensione.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
C 1
24310.
4994590.
C 2 19620.
4990270. ' Imbocco
C 3
16159.
4999013.
! !
C 4
18960.
5001160. 0.02 0.02
C 5
13450.
5005145.
C 6
17550.
5010520.
B 3-4 193.1883 !
DB 1 # questo comando indica che iniziano le direzioni
DN 2 252.4670 2.0
DN 3 331.4213 2.0
DN 4 356.2752 2.0
DE
DB 2
DN 3 40.7686 2.0
DN 4 60.9461 2.0
DN 1 117.4699 2.0
DE
DB 3
DN 5 108.1541 2.0
DN 6 142.1903 2.0
# riga di misura tolta DN 4 193.1883 2.0
DN 1 266.4275 2.0
DN 2 310.7721 2.0
DE
DB 4
DN 1 126.2719 2.0
DN 2 165.9408 2.0
DN 3 228.1789 2.0
DN 5 309.6164 2.0
DN 6 359.9843 2.0
DE
DB 5
DN 6 76.0532 2.0
DN 4 174.6229 2.0
DN 3 208.1509 2.0
DE
DB 6
DN 4 129.9963 2.0
DN 3 147.1932 2.0
DN 5 181.0585 2.0
DE
D 1-2
6373.596 0.005
D 1-3
9276.155 0.005
D 1-4
8472.386 0.005
D 2-3
9396.078 0.005
D 2-4
10902.251 0.005
D 4-3
3531.752 0.010
D 6-5
6760.670 0.010
109
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
Coordinate
Nelle righe che vanno da 1 a 6 sono presenti le coordinate dei punti della rete:
coordinate approssimate per tutti i punti tranne che per il punto 3.
Non è necessario che le coordinate precedano le misure: queste e quelle
possono essere sparse in qualunque ordine. Per evitare errori grossolani è
opportuno però che siano riunite in un unico gruppo.
La codifica che descrive una coordinata è la lettera C a cui seguono le
coordinate X (EST) e Y (NORD) e gli eventuali s.q.m. X e Y espressi nelle
stesse unità di misura (si veda ad esempio la riga 4).
Come si vede dall’esempio non è richiesto alcun incolonnamento tranne che
per la lettera C che va editata in prima colonna.
Un punto fisso dovrà essere indicato con due punti esclamativi (!) dopo le
coordinate.
I punti possono avere nome numerico o alfanumerico. Nell’esempio è solo un
caso che tutti abbiano nome numerico. Se si vuole inserire un commento da
riportare sul disegno a fianco del nome del punto, si può inserire tale
commento dopo le coordinate preceduto da un apice (‘) come a riga 2.
Non è necessario in compensazione inserire le coordinate approssimate dei
punti in quanto il programma stesso è in grado di calcolarle.
Tali coordinate sono invece necessarie in fase di simulazione (il programma la
chiama preanalisi) in quanto, senza misure, non sarebbe in grado di calcolarle.
In questo esempio le righe 1, 2, 4, 5 e 6 non sarebbero necessarie.
Se si desidera commentare una riga o si desidera togliere una misura o un
punto è sufficiente usare il tasto cancelletto (#) come è visibile in riga 21 o in
riga 8.
Misure
Le misure planimetriche possono essere: angoli, distanze, azimut, direzioni
azimutali.
Sono inserite attraverso un codice di inserimento (A, D, B, DB/DN/DE)
seguito dal nome delle stazioni coinvolte, dalla misura e dal relativo eventuale
s.q.m..
Se tutti i gruppi di misure hanno la stessa precisione è possibile tralasciare il
valore di s.q.m. per ciascuna misura ma inserirlo, una volta per tutte, nelle
opzioni del lavoro.
Se la maggioranza delle misure ha la stessa precisione, sarà conveniente
imporla nelle opzioni e per le poche misure con precisione diversa si farà
seguire alla misura stessa il valore particolare dello s.q.m..
Quando si vuole imporre una misura, cioè si vuole fare in modo che venga
rispettata senza scarto, occorre inserire il carattere punto esclamativo (!) dopo
la misura.
110
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
Quando si desidera che venga calcolato solo lo scarto, ma non venga utilizzata
nel calcolo di compensazione, occorre far seguire alla misura il carattere e
commerciale (&).
Azimut (B)
Il codice degli azimut è la lettera B seguita dai nomi dei due punti separati dal
carattere meno (-) e dal valore dell’angolo.
Se l’azimut ha un suo s.q.m. segue il valore in dmgon (oppure in secondi
sessagesimali). Se l’azimut è da imporre come una condizione rigorosa da
rispettare, deve seguire il carattere punto esclamativo (!) come è visibile in
riga 7. Ciò avviene quando si vuole stabilire un datum (sistema di riferimento)
per una rete planimetrica di angoli e distanze a minimi vincoli. In questo caso
si fissano un punto e un azimut come nell’esempio illustrato.
Direzioni azimutali (DB DN DE)
Le righe 9, 10, 11 e 12 riportano un esempio.
Tutte le direzioni iniziano con DB, seguite dal nome della stazione su cui si
misurano le direzioni azimutali.
Seguono le righe che iniziano con DN seguite dal nome del punto collimato, la
direzione azimutale ed eventualmente il valore dell’s.q.m. della misura o il
vincolo (! oppure &).
Al termine delle direzioni misurate dalla stessa stazione segue il comando DE
senza altri parametri.
Distanze (D)
Il codice delle distanze è la lettera D a cui seguono i due nomi delle stazioni
coinvolte separate dal carattere meno (-), il valore della misura ed
eventualmente lo s.q.m. e il tipo di vincolo imposto.
Angoli (A)
Conviene utilizzare questo codice quando da un vertice si misura un solo
angolo azimutale.
Il codice degli angoli è A a cui seguono i tre punti coinvolti separati dal
carattere meno (-), il valore della misura ed eventualmente il valore dello
s.q.m. e il vincolo imposto.
La convenzione angolare di percorrenza può essere scelta nelle opzioni nelle
seguenti forme:
At, From, To (Su, Da, Verso) cioè: punto di stazione punto indietro e punto
avanti
From, At, To (Da, Su, Verso) cioè: punto indietro, punto al centro e punto
avanti
111
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
Esempio di dati predisposti per la simulazione (preanalysis)
C 1 24310. 4994590.
C 2 19620. 4990270. Imbocco
C 3 16159. 4999013. ! !
C 4 18960. 5001160.
C 5 13450. 5005145.
C 6 17550. 5010520.
B 3-4 58.3660
!
DB 1
DN 2
DN 3
DN 4
DE
DB 2
DN
DN
DN
DE
DB
DN
DN
DN
DN
DN
DE
DB
3
4
1
La riga qui a sinistra può servire
per fissare il datum ma non è
affatto obbligatoria
Seguono
le
misure
che
si
intendono
eseguire SENZA la misura stessa.
La precisione dei gruppi di
misure
si presuppone che sia stata data
nelle opzioni
3
5
6
4
1
2
4
1 5.0
DN 1
DN 2
DN 3
1 5.0
1 5.0
1 5.0
DN 5 1 5.0
DN 6 1 5.0
DE
DB 5
DN 6
DN 4
DN 3
DE
DB 6
DN 4
DN 3
DN 5
DE
D 1-2
D 1-3
D 1-4
D 2-3
D 2-4
D 4-3
D 6-5
112
Come si vede il file contiene le
coordinate di tutti i punti.
In questo caso sono obbligatorie
Nel caso in cui la precisione
della
misura sia diversa da quella
indicata nelle opzioni, bisognerà
inserire una misura fasulla (1) e
a
fianco il valore dello s.q.m.
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
26. Compensazione di una intersezione mista di distanze e direzioni azimutali
1
δ
Y
t
t
13
12
2
3
Y0= 100
X0= 100
ASSE X
Sono note le coordinate (x,y) dei punti:
2 ≡ (690,60; 300,50) m
3 ≡ (200,10; 160,20) m
Dalla stazione 1 verso questi punti sono state misurate le distanze:
d12 = 519,15m ±1cm;
d13 = 650,20m ±1cm;
Inoltre, orientando il teodolite verso il punto 2, si sono misurati:
t1 = α213 = 55,7956 gon ±7⋅10-4 gon;
t12 = 0 gon ±7⋅10-4 gon;
Date le coordinate approssimate del punto 1 ricavate per via grafica: 1≡(450,0; 760,6)
m, si desidera ricavare la stima delle coordinate del punto 1 e la loro precisione.
In questo caso, essendo l’angolo α213 l’unico angolo misurato dal punto 1, è
equivalente risolvere il problema con l’equazione dell’angolo azimutale, senza
correlazioni oppure con le due equazioni alle direzioni.
113
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
Si noti anche che nel primo caso si deve scrivere un sistema di tre equazioni
(due distanze ed un angolo) nelle due coordinate incognite (x1, y1). Nel secondo
caso un sistema di quattro equazioni (due distanze e due direzioni azimutali)
nelle tre incognite: le coordinate del punto 1 e la correzione d’orientamento δ.
In entrambi i casi la ridondanza globale vale r = m-n = 1, così che il metodo
dei minimi quadrati è applicabile con profitto.
I programmi di calcolo e compensazione più evoluti scelgono in questo caso,
per generalità, il metodo delle direzioni.
Le equazioni angolari nella forma si scrivono:
x − x1
atn 3
+ π − t13 − δ = v1
y3 − y1
x − x1
atn 2
+ π − t12 − δ = v 2
y 2 − y1
Le equazioni nelle distanze sono:
( x 3 − x 1 ) 2 + ( y 3 − y 1 ) 2 − d 13 = v 3
( x 2 − x1 ) 2 + ( y 2 − y1 ) 2 − d12 = v 4
Si noti che, essendo le direzioni verso 2 e 3 nel secondo e terzo quadrante, si è
sommato ad entrambe le equazioni il valore π.
Per calcolare i termini noti ci manca un valore approssimato della correzione δ.
Essendo il cerchio azimutale orientato a zero sul punto 2, la correzione è il
valore dell’angolo di direzione (12), che è possibile misurare graficamente. Si
ha δ =170 gon (=2,670354 rad).
I termini noti l1, l2, l3 ed l4 valgono:
249,9
l1 = 0,876435 + 2,670354 − atn
− π − = 0,010784 (rad )
600,3
240,6
l2 = 0,0 + 2,670354 − atn
− π = 0,010584 ( rad )
− 460,0
l3 = 650,20 − 249,9 2 + 600,32 = −0,1308 m
l4 = 519,15 − 240,6 2 + 460 2 = −0,0613 m
Formiamo ora la matrice disegno A. Sarà di quattro righe (m=4) e di tre
colonne (n=3), quante sono le incognite δx1, δy1, δ(δ). La prima riga esprime le
114
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
derivate rispetto alla prima misura, la seconda le derivate rispetto alla seconda
ecc.
Prima riga:
a11 =
∂f
x −x
∂f
y −y
∂f 1
= − 3 2 1 ; a12 = 1 = 3 2 1 ; a13 = 1 = −1
∂y1
d13
∂δ
∂x1
d13
Sostituendo i valori si ottiene:
a11 =
600,3
− 249,9
; a12 =
; a13 = −1
2
2
650,238
650, 238
per la seconda riga (e misura) si ha:
a12 =
460,0
240,6
∂f 2
y −y
∂f
x −x
; a 22 = 2 = 2 2 1 =
; a 23 = −1
=− 2 2 1 =
2
519,123
519,123 2
∂x1
∂y1
d 12
d12
per la terza misura:
a13 =
∂f 3
x − x1
∂f
y − y1
249,9
600,3
; a32 = 3 = − 3
; a33 = 0
=− 3
=
=
650,238
650,238
∂x1
d13
∂y1
d 13
per la quarta ed ultima misura:
a14 =
x − x1 − 240,6
y − y1
460,0
∂f 4
∂f
; a 42 = 4 = − 2
; a 43 = 0
=− 2
=
=
519,123
519,123
∂x1
d 12
∂y1
d12
in definitiva:
1,41979 ⋅ 10 −3
1,70694 ⋅ 10 −3
A=
0,38432
− 0,46347
− 0,59105 ⋅ 10 −3
0,89280 ⋅ 10 −3
0,92320
0,88611
− 1
− 1
0
0
Occorre ora pesare ciascuna equazione in proporzione inversa alla varianza di
ogni misura. Ricordando la forma della matrice dei pesi e assumendo σ 20 = 1
pj =
1
;
σ 2j
2
7 ⋅ 10 −4
; σ 32 = σ 24 = (0,01 m )2
σ = σ =
63,6620
2
1
2
2
115
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
e si ottiene così:
8,27 ⋅ 10 9
P=
8,27 ⋅ 10 9
1 ⋅ 10 4
1 ⋅ 10 4
Calcoliamo ora la matrice normale N come: N = AT PA
4,4397 ⋅ 10 4
N =
Simmetrica
5,1052 ⋅ 10 3
2,5857 ⋅ 10 4
− 2,5682 ⋅ 10 7
− 2,4959 ⋅ 10 6
1,6542 ⋅ 1010
e la sua inversa N-1
N −1
2,5580 ⋅ 10 −4
=
Simmetrica
− 1, 2080 ⋅ 10 −5
3,9816 ⋅ 10 −5
3,9809 ⋅ 10 −7
− 1,2878 ⋅ 10 −8
6,8086 ⋅ 10 −10
Il termine noto normale vale:
2,7581 ⋅ 10 5
b = AT Pl = 2,3676 ⋅10 4
− 1,7673 ⋅ 10 8
ed infine, la soluzione è:
δx1
− 0,0807 m
−1
δxˆ = δy1 = N b = − 0,0113 m
δ(δ)
− 0,01083 rad
I valori compensati delle coordinate del punto 1 e della correzione
d’orientamento sono:
1≡(449,919; 760,489) m; δ=(170-0,01083*63,6620) gon =169,3105 gon
Ricaviamo ora il vettore degli scarti v dopo la compensazione, secondo la
− 4,5108 ⋅ 10 −6 rad
4,5108 ⋅ 10 − 6 rad
vˆ = Aδxˆ − l =
− 0,0046 m
− 0,0015 m
116
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
Ed ora, secondo la 19, calcoliamo la stima σ 20
m
σˆ 02 =
∑ p vˆ
j
j =1
2
j
m−n
=
vˆ T Pvˆ
= 0,5677 (è adimensionale)
m−n
Si noti che σ 20 < σ 20 fissato a priori =1.
Ora ricaviamo la matrice di varianza covarianza delle coordinate:
Cxx = σ 20 N −1;
σ 2x
σ xy
σ 2y
C xx =
Simmetrica
σ xδ 1,4464 ⋅ 10 −4
σ yδ =
σ δ2 Simmetrica
− 6,8301 ⋅ 10 −6
2,2513 ⋅10 −5
− 2, 2509 ⋅ 10 −7
7, 2813 ⋅ 10 −9
3,8497 ⋅ 10 −10
e, in definitiva
σ x = ±0,0121 m ; σ y = ±0,0048 m ; σ δ = ±12,52 ⋅ 10 −4 gon
Si può infine valutare a posteriori la precisione delle misure dopo la
compensazione, o meglio, la stima della precisione degli scarti dopo la
compensazione, attraverso le 22 che esprime la matrice di varianza covarianza
degli scarti:
[
Cvv = σ 20 P −1 − AN −1 AT
Cvˆvˆ
2,034 ⋅ 10 −11
=
Simmetrica
]
− 2,026 ⋅10 −11
2,034 ⋅ 10 −11
2,054 ⋅ 10 −8
− 2,054 ⋅ 10 −8
2,0915 ⋅ 10 −5
6,6556 ⋅ 10 −9
− 6,6556 ⋅ 10 −9
6,7496 ⋅10 −6
2,1862 ⋅10 −6
ricavando così:
σ v1 = σ v 2 = ±2,86 ⋅ 10 −4 gon
σ v 3 = ±4,56 mm;
σ v 4 = ±1,48 mm;
Si noti che gli sqm angolari sono migliori (più piccoli) degli sqm delle misure
angolari ipotizzate a priori di ±7· 10-4 gon ed anche gli sqm degli scarti delle
due distanze sono diversi fra loro e più piccoli degli sqm a priori delle distanze
ipotizzati di ±10 mm.
117
ISTRUZIONI PER L’ USO DI STARNET AL LAIB
Infine ricaviamo la matrice di ridondanza, definita dalle relazioni:
S=
1 n
∑ yi ( xi −1 − xi +1 )
2 i =1
R=
1
P Cvv
σˆ 02
R = I − PAN −1 AT
Evitando i complessi conti matriciali si può ricavare:
rii =
pi σ vi2
;
σ 20
r11 = r22 = 0,2965 ;
r33 = 0,367 ;
r44 = 0,040 .
Si verifica che r11 + r22 + r33 + r44 = 1 , che è la ridondanza globale r (r=1 in
questo esempio). Questi valori indicano il contributo di ogni misura alla
rigidità complessiva della rete.
Come si nota dalla forma 23b questi valori possono essere calcolati senza
bisogno delle misure l.
Nel nostro caso possiamo affermare che la quarta misura ha pochissima
influenza sulla rigidità della rete. Ciò era progettabile in anticipo, prima di
eseguire le misure. In questo caso d’altra parte non possiamo permetterci il
lusso di progettare reti con ridondanza nulla e quindi senza controllo interno
alcuno. In altre circostanze, da un progetto preliminare di una rete, se una
misura risulta avere bassa ridondanza locale, si decide di solito di non
eseguirla.
Qui di seguito è riportato il listato dell’uscita di un programma automatico di
calcolo e progettazione di reti, denominato CALGE (del Politecnico di
Milano), eseguito con i dati di questa piccola rete di esempio.
118
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
Esempio eseguito con CALGE:
UNITÀ DI MISURA:
MISURE ANGOLARI in gon
MISURE LINEARI
in m
CORREZIONI E PARAMETRI ANGOLARI
CORREZIONI E COORDINATE LINEARI
gon
m
RESIDUI E SQM ANGOLARI
dmgon
RESIDUI E SQM LINEARI
mm
PRECISIONE A PRIORI DELLA RETE TOPOGRAFICA
SIGMA ZERO (CC) 100.
SQM DELLE OSSERVAZIONI TOPOGRAFICHE:
ANGOLI AZIMUTALI dmgon 10.
DISTANZE
(mm)
10.+10.*D (km)
DISLIVELLI
(mm)
1.*SQRT(D) (km)
PRECISIONE A PRIORI DELLE COORDINATE DI PUNTI
DATE IN ALTRI SISTEMI DI RIFERIMENTO:
RETE TOPOGRAFICA
MISURE DI ANGOLI E DISTANZE
N.
PUNTI
DIREZIONI AZIMUTALI
DISTANZE INCLINATE
IND. AV.
I-A
A-I
I-A
A-I
(gon)
(gon)
(m)
(m)
1
1
2
0.0000
2
1
3
55.7956
3
1
2
519.150
4
1
3
650.200
LATI
4
LATI RIGIDI
0
PUNTI E COORDINATE APPROSSIMATE
N.
PUNTO
1
2
3
PUNTI
FIX
1
2
3
0
2
2
3
LATI
LATI RIGIDI
COORD.X
(m)
450.000
690.600
200.100
PUNTI FISSI
4
0
VERTICI
VERTICI FISSI
COORD.Y
(m)
760.600
300.500
160.200
2
3
2
119
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
TERMINI NOTI ED SQM DELLE EQUAZIONI AGLI ANGOLI E ALLE
DISTANZE
N.
PUNTI
IND. AV.
1
2
3
4
1
1
1
1
2
3
2
3
DISTANZE
I-A
(mm)
61.3
130.8
SQM T. NOTO =
ITERAZIONE N.
ITERAZIONE N.
ITERAZIONE N.
DIREZIONI AZIMUTALI
I-A SQM
A-I SQM
(cc) (cc)
(cc) (cc)
-6737.9 7.0
-6865.1 7.0
79339.5
1
2
3
SIGMA ZERO =
SIGMA ZERO =
SIGMA ZERO =
58.0
57.9
57.9
CORREZIONI COORDINATE COMPENSATE E SQM
N. PUNTO FIX
COORD. COMPENSATA X
COORD. COMPENSATA Y
CORREZ.
VALORE
SQM CORREZ.
VALORE
SQM
(m)
(m)
(mm)
(m)
(m)
(mm)
1
2
3
1
2
3
0
2
2
-0.0833
0.0000
0.0000
449.9167
690.6000
200.1000
14.0 -0.1150
0.0 0.0000
0.0 0.0000
760.4850
300.5000
160.2000
4.8
0.0
0.0
CORREZIONI ORIENTAMENTI DELLE STAZIONI E SQM
N.
1
N.
3
3
1
120
MEDIA
(VAL)
-27.8
-38.3
-6895.4
PUNTO
CORREZ.
(gon)
-0.68954
1
SQM
48.1
66.4
0.0
VALORE
(gon)
169.31046
RMS
(SQM)
8.1
2.8
14.1
SQM
(CC)
14.1
MAX
14.0
4.8
14.1
COORD. X
COORD. Y
ORIENTAMENTO
ISTRUZIONI OPERATIVE PER L’ USO DI STARNET AL LAIB
SCARTI-RESIDUI DELLE EQUAZIONI ALLE MISURE DI ANGOLI E
DISTANZE
N.
PUNTI
IND. AV.
1
2
3
4
N.
2
2
MEDIA
(VAL)
0.0
-4.7
1
1
1
1
2
3
2
3
SQM
2.4
3.8
DIREZIONI AZIMUTALI
I-A SQM
A-I SQM
(CC) (CC) (CC) (CC)
1.7 1.7
-1.7 1.7
DISTANZE
I-A SQM
(mm) (mm)
-2.0
-7.4
RMS
(SQM)
1.7
5.4
2.0
7.4
MAX
1.7
7.4
SIGMA ZERO
57.9129
90.9694
(ANG. E LIN. A 1 KM)
EQUAZIONI
4
INCOGNITE
VINCOLO SISTEMA DI RIFERIMENTO:
VINCOLI DOVUTI A LATI RIGIDI
VINCOLI DOVUTI A PUNTI FISSI
RIDONDANZA
1
ITERAZIONI
DIREZIONI AZIMUTALI
DISTANZE
7
0
4
2
Fine esecuzione di Calge
121
9. ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA
ESTERNAMENTE
POLIGONALE ESEGUITA IL 27/04/2000
Le tabelle che seguono riportano i valori misurati in campagna. I simboli
adottati hanno il seguente significato:
C=Cerchio Destra o Sinistra (D/S)
Dridotta= distanza orizzontale
Stazione 1
Punti C
2
S
D
6
S
D
101 S
D
T
T
1,533
T
1,600
P
Stazione 2
Punti C
1
S
D
3
S
D
101 S
D
102 S
D
103 S
D
NB: ai prismi Nikon occorre aggiungere 3 mm
Hs=
H
1,491
T
T
1,600
P
1,600
P
1,600
P
ND
x
1,628
Azimut
212,9395
12,9395
309,4600
109,4550
196,2550
396,2515
Hs=
H
1,625
Pr=prisma Nikon o Leica (N/L)
T=Treppiede/Palina
Azimut
125,3380
325,3355
390,2075
190,2045
139,0325
339,0315
372,6200
172,6220
249,3890
49,3870
Zenit
97,6320
302,6400
100,2565
299,7445
100,0720
299,9295
D ridotte
77,213
Pr
N
30,373
L
35,892
35,888
L
L
Zenit
102,6440
297,3585
100,1095
299,8905
104,7390
295,2625
99,9665
300,0260
96,5355
303,4665
D ridotte
77,214
Pr
N
61,437
L
43,560
43,558
101,500
101,500
ND
L
L
L
L
Note
GPS
1,491
Palo luce
123
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
Tabella delle misure
Stazione 3
Punti C
4
S
D
2
S
D
102 S
D
103 S
D
Hs=
H
T
1,654 T
1,510 T
1,600 P
ND
x
Stazione 4
Punti C
5
S
D
3
S
D
H
T
1,544 T
1,491 T
Stazione 5
Punti C H
6
S 1,534
D
4
S 1,622
D
Stazione 6
Punti C H
5
S 1,510
D
1
S 1,659
D
104 S 1,600
D
124
1,495
Azimut
232,8150
32,8120
378,1125
178,1135
136,5715
336,5700
5,2860
205,2870
Hs=
T Azimut
T 189,2335
389,2320
T 71,8500
271,8485
P 231,7945
31,7925
Pr
L
L
N
N
L
L
Zenit
100,1145
299,8855
95,4075
304,5930
D ridotte
49,854
Pr
L
42,604
N
Zenit
99,9320
300,0710
99,8495
300,1485
D ridotte
77,174
Pr
L
49,849
N
Zenit
100,0485
299,9530
99,6205
300,3795
100,1380
299,8670
D ridotte
77,170
Pr
N
30,373
L
38,305
38,312
L
L
Palo luce
1,512
T Azimut
T 362,4645
162,4665
T 222,9115
22,9070
Hs=
D ridotte
42,608
42,608
61,431
61,431
45,588
45,591
ND
1,625
Azimut
278,1155
78,1160
323,3235
123,3215
Hs=
Zenit
104,5525
295,4475
99,7630
300,2365
99,6405
300,3585
98,0790
301,9240
1,502
Note
GPS
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
125
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
Files dei dati di CALGE:
Misure del giovedì 24/4/2000: file GIOVE.U01
1
1
1
2
2
2
2
2
3
3
3
3
4
4
5
5
6
6
6
1
1
1
2
2
2
2
3
3
3
4
4
5
5
6
6
6
2
6
101
1
3
101
102
103
4
2
102
103
5
3
6
4
5
1
104
2
6
101
1
3
101
102
4
2
102
5
3
6
4
5
1
104
212.94025
309.4575
196.25325
125.33675
390.2060
139.0320 15.0
372.62100
249.38800
232.81350
378.1130
136.57075
5.28650
278.11575
323.32250
362.46550
222.90925
189.23275
71.84925
231.79350
A
77.216
30.373
35.890
77.217
61.437
43.559
101.500
42.608
61.434
45.5895
49.854
42.607
77.174
49.852
77.173
30.373
38.3081
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
3.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
2.0
Coordinate approssimate relative alle misure del giovedì 24/4/2000: file
GIOVE.U02
1
2
3
4
5
6
101
102
103
104
0
2
0
0
0
0
0
0
0
0
6.5977
36.0000
-0.1097
-42.5694
-7.6010
-20.8146
28.3948
0.9952
88.7766
-39.0615
167.4010
96.0000
46.2993
42.7553
78.2872
154.3206
138.8894
0.7249
96.6782
120.6374
-37.80
-150.2060
61.88
171.30
26.58
-0.19
Parametri comuni alla rete relativa alle misure del giovedì 24/4/2000: file
GIOVE.U05
Rete planimetrica "POLIGONALE 2000"
1 , 1 , 0 , 0
1 , 2 , 0 , 0
10 ,15 , 3 , 2 , 0 , 0 , 0 , 0
6374972.867,0.14
0,1
126
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
OUTPUT DELLA COMPENSAZIONE CALGE
Dati del file w:\topociv\GIOVE.U05
Rete planimetrica "POLIGONALE 2000"
UNITA DI MISURA
MISURE ANGOLARI
MISURE LINEARI
MISURE MODELLI
O FOTOGRAMMI
GRAD
M
MICRON
CORREZIONI E PARAMETRI ANGOLARI
CORREZIONI E COORDINATE LINEARI
RESIDUI E SQM ANGOLARI
RESIDUI E SQM LINEARI
RESIDUI E SQM MODELLI
O FOTOGRAMMI
GRAD
M
CC
MM
MICRON
PRECISIONE A PRIORI DELLA RETE TOPOGRAFICA
SIGMA ZERO (CC)
10.
SQM DELLE OSSERVAZIONI TOPOGRAFICHE:
ANGOLI AZIMUTALI (CC)
15.
DISTANZE
(MM)
3.+ 2.*D (KM)
ANGOLI ZENITALI (CC)
0.
DISLIVELLI
(MM)
0.*SQRT(D) (KM)
PESO DEI VINCOLI0.1000E+09
RETE TOPOGRAFICA
MISURE DI ANGOLI E DISTANZE
N.
PUNTI
IND. AV.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
1
1
1
2
2
2
2
2
3
3
3
3
4
4
5
5
6
6
6
1
1
1
2
2
2
2
3
28
29
30
31
32
33
34
35
36
LATI
DIREZ. AZIMUTALI
I-A
A-I
(GRAD)
(GRAD)
2
6
101
1
3
101
102
103
4
2
102
103
5
3
6
4
5
1
104
2
6
101
1
3
101
102
4
DIST. INCLINATE
I-A
A-I
(M)
(M)
212.94025
309.4575
196.25325
125.33675
390.2060
139.0320
372.62100
249.38800
232.81350
378.1130
136.57075
5.28650
278.11575
323.32250
362.46550
222.90925
189.23275
71.84925
231.79350
ANG. ZENITALI H STRUMENTI
H SEGNALI TIPO VINCOLO
I-A
A-I
IND.
AV. IND.
AV.
(GRAD)
(GRAD)
(M)
(M)
(M)
(M)
(in colonna 132:) A
77.216
30.373
35.890
77.217
61.437
43.559
101.500
42.608
3
3
4
4
5
5
6
6
6
36
2
102
5
3
6
4
5
1
104
61.434
45.5895
49.854
42.607
77.174
49.852
77.173
30.373
38.3081
LATI RIGIDI
1
127
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
PUNTI E COORDINATE APPROSSIMATE
N.
PUNTO
FIX
COORD.X
SQM X
(M)
1
2
3
4
5
6
7
8
9
10
1
2
3
4
5
6
101
102
103
104
PUNTI
0
2
0
0
0
0
0
0
0
0
(MM)
10
6.5977
36.0000
-0.1097
-42.5694
-7.6010
-20.8146
28.3948
0.9952
88.7766
-39.0615
COORD.Y
SQM Y
(M)
(MM)
COORD.Z
(M)
SQM Z
ORIENTAMENTO
STAZIONE
(GRAD)
(MM)
167.4010
96.0000
46.2993
42.7553
78.2872
154.3206
138.8894
0.7249
96.6782
120.6374
PUNTI FISSI
-37.80
-150.2060
61.88
171.30
26.58
-0.19
1
RIORDINO DELLA NUMERAZIONE
LATI
LATI RIGIDI
36
1
VERTICI
VERTICI FISSI
10
1
BANDA
7
BANDA
3
PROFILO
(MAX)
3
(MED)
2
(PRIMA E DOPO IL RIORDINO DELLA NUMERAZIONE)
INDIETRO
42
27
AVANTI
35
29
FATTORE DI
RISPARMIO
1:
1
TERMINI NOTI ED SQM DELLE EQUAZIONI AGLI ANGOLI E ALLE DISTANZE
N.
PUNTI
IND. AV.
1
1
2
1
3
1
4
2
5
2
6
2
7
2
8
2
9
3
10
3
11
3
12
3
13
4
14
4
15
5
16
5
17
6
18
6
19
6
20
1
21
1
22
1
23
2
24
2
25
2
26
2
27
3
28
3
29
3
30
4
31
4
32
5
33
5
34
6
35
6
36
6
SQM T. NOTO =
DIREZIONI AZIMUTALI
I-A SQM
A-I SQM
(CC) (CC) (CC) (CC)
2
6
101
1
3
101
102
103
4
2
102
103
5
3
6
4
5
1
104
2
6
101
1
3
101
102
4
2
102
5
3
6
4
5
1
104
DISTANZE INCLINATE
SQM
A-I SQM
(MM)
(MM) (MM)
I-A
(MM)
-85.1
-10.6
-64.6
9.9
0.2
15.1 15.0
2.4
-0.4
50.9
70.2
61.4
72.1
754.2
760.9
2.9
19.2
30.4
-28.1
24.3
1.9
0.2
-0.9
0.9
-3.5
-0.5
2.1
-0.7
-0.5
-1.7
-1.2
0.3
-1.0
0.8
0.0
0.2
0.0
3.2
3.1
3.1
3.2
3.1
3.1
3.2
3.1
3.1
3.1
3.1
3.1
3.2
3.1
3.2
3.1
3.1
122.4
OCCUPAZIONE DI MEMORIA
PIENA
COMPATTA
FATTORE DI
RIEMPIMENTO
MATRICE DISEGNO
936
197
1:
5
MATRICE NORMALE
351
177
1:
2
(M. NORMALE A PROFILO = M. FATTORIZZATA A PROFILO = PROFILO M. INVERSA)
ITERAZIONE N.
1
SIGMA ZERO =
12.7
ITERAZIONE N.
2
SIGMA ZERO =
12.7
NUMERO DI CONDIZIONE ( CHI = MAX(ABS(C) / MAX(ABS(C**-1)) )
NUMERO DI RIGA CORRISPONDENTE DELLA MATRICE INVERSA
128
4.6E+02
1
ANGOLI ZENITALI
I-A SQM
A-I SQM
(CC) (CC)
(CC) (CC)
ESERCITAZIONI CON CALGE: POLIGONALE RILEVATA ESTERNAMENTE
RETE TOPOGRAFICA
CORREZIONI COORDINATE COMPENSATE E SQM
N. PUNTO FIX
COORD. COMPENSATA X
CORREZ.
VALORE
SQM
(M)
(M)
(MM)
1
1
0
0.0015
6.5992
2.5
2
2
2
0.0000
36.0000
0.0
3
3
0 -0.0003
-0.1100
1.3
4
4
0
0.0014
-42.5680
2.7
5
5
0
0.0020
-7.5990
2.6
6
6
0
0.0004
-20.8142
3.1
7
101
0
0.0000
28.3948
1.6
8
102
0 -0.0005
0.9947
2.1
9
103
0 -0.0045
88.7721
9.0
10
104
0
0.0021
-39.0594
3.4
COORD. COMPENSATA Y
CORREZ.
VALORE
SQM
(M)
(M)
(MM)
0.0010
167.4020
2.1
0.0000
96.0000
0.0
-0.0004
46.2989
1.8
-0.0001
42.7552
2.3
0.0010
78.2882
2.4
0.0003
154.3209
2.6
0.0004
138.8898
2.6
0.0002
0.7251
3.0
-0.0011
96.6771
2.0
-0.0007
120.6367
4.5
COORD. COMPENSATA Z
CORREZ.
VALORE
SQM
(M)
(M)
(MM)
CORREZIONI ORIENTAMENTI DELLE STAZIONI E SQM
N.
PUNTO
CORREZ.
VALORE
SQM
(GRAD)
(GRAD)
(CC)
1
1
-0.00404
-37.80404
24.9
2
2
0.00118
-150.20482
14.4
3
3
0.00626
61.88626
17.3
4
4
0.07570
171.37570
24.9
5
5
0.00021
26.58021
24.2
6
6
-0.00074
-0.19074
25.4
N.
MEDIA
(VAL)
0.2
0.0
131.0
10
10
6
SQM
RMS
(SQM)
3.6
2.6
22.3
1.9
0.7
308.5
MAX
9.0
4.5
25.4
COORDINATA X
COORDINATA Y
ORIENTAMENTO STAZIONI
SCARTI-RESIDUI DELLE EQUAZIONI ALLE MISURE DI ANGOLI E DISTANZE
N.
PUNTI
AV.
IND.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
N.
19
17
1
1
1
2
2
2
2
2
3
3
3
3
4
4
5
5
6
6
6
1
1
1
2
2
2
2
3
3
3
4
4
5
5
6
6
6
2
6
101
1
3
101
102
103
4
2
102
103
5
3
6
4
5
1
104
2
6
101
1
3
101
102
4
2
102
5
3
6
4
5
1
104
MEDIA
(VAL)
0.0
-0.1
DIREZIONI AZIMUTALI
I-A
SQM
A-I SQM
(CC)
(CC) (CC) (CC)
-30.0
26.7
3.3
12.9
-11.6
4.6
-5.9
0.0
-8.9
7.6
1.2
0.0
-6.7
6.7
-13.2
13.2
23.8
-23.8
0.0
DISTANZE INCLINATE
I-A SQM
A-I SQM
(MM) (MM)
(MM) (MM)
ANGOLI ZENITALI
I-A SQM
A-I SQM
(CC) (CC)
(CC) (CC)
11.1
8.4
7.6
11.3
12.6
9.2
12.2
0.0
7.2
8.1
5.4
0.0
8.6
8.6
6.0
6.0
7.5
7.5
0.0
2.2
1.5
-1.4
1.2
-3.0
-0.1
2.1
-2.4
0.0
-2.4
0.0
-1.4
-1.4
2.0
-0.4
1.5
0.0
SQM
RMS
(SQM)
8.1
3.0
14.3
1.7
SIGMA ZERO
12.7282
19.9934
(ANG. E LIN. A 1 KM)
EQUAZIONI
36
INCOGNITE
VINCOLO SISTEMA DI RIFERIMENTO:
VINCOLI DOVUTI A LATI RIGIDI
VINCOLI DOVUTI A PUNTI FISSI
RIDONDANZA
13
ITERAZIONI
3.4
3.0
2.8
3.4
3.3
2.9
2.8
3.0
3.3
2.6
3.1
3.0
3.2
3.1
3.2
3.0
0.0
MAX
12.6
3.4
DIREZIONI AZIMUTALI
DISTANZE
26
1
2
129
10. ESERCIZI DI TOPOGRAFIA
1.
Sull’ellissoide GRS80 calcolare il valore della gravità normale per un punto di
coordinate:
latitudine=45° 20’ 30”; altezza ortometrica=150m; ondulazione geoidica=45 m.
Calcolare le coordinate cartesiane geocentriche se il punto ha longitudine= 8° 05’.
Calcolare le coordinate polari geocentriche.
Calcolare il valore del potenziale sulla superficie dello sferoide.
2.
Del punto P di coordinate ellissoidiche (ellissoide GRS80):
latitudine=45°15’; longitudine=9°; h=200 m; deviazione della verticale ξ=30”; η =-20”;
ondulazione N=42,2 m;
calcolare le coordinate naturali.
Calcolare le coordinate geografiche di un secondo punto Q che nel riferimento
cartesiano locale con origine in P dista Dx=1000 m; Dy=-500 m; dZ =-0,5 m.
3.
Dal punto P di coordinate ellissoidiche (GRS80):
latitudine=45°15’; longitudine=9°; h=200 m;
si misurano azimut e distanza ad un secondo punto Q: azimut= 60° 15’ 20”;
distanza=12135,3 m.
Si desiderano ricavare le coordinate geografiche di Q.
Si desiderano le coordinate geografiche rettangolari di Q.
Si calcolino i due raggi di curvatura in P e Q.
131
ESERCIZI DI TOPOGRAFIA
4.
Da due punti A e B si osserva un punto C misurando gli angoli α=60,26134 gon e
β=69,75132 gon nei vertici A e B. I punti hanno coordinate:
A(ϕ=45°28’38,36”; λ=9° 13’ 39,57”); B(ϕ=45°38’2,86”; λ=9° 40’ 40,02”).
Calcolare le coordinate geografiche e cartografiche di C.
5.
Intersezione inversa distanziometrica. Si conoscono le coordinate di tre punti 1(0,0);
2(3,4); 3(9,4). Con un nastro centimetrato dal punto 4 si misurano le distanze:
a=1-4=5,0 m; b=2-4=5,1 m; c=3-4=4,98 m.
Tutte le distanze hanno ugual precisione.
Calcolare le coordinate del punto 4, la matrice di varianza covarianza delle cordinate, i
semiassi principali dell’ellisse d’errore.
6.
Rototraslazione piana con e senza variazione di scala: di tre punti A, B e C.
Sono note le coordinate in un sistema intrinseco [I] e nel sistema cartografico [C]. Tali
coordinate valgono:
Sistema
A
B
C
I: (X, Y)
(8082,82; 7562,26)
(5201,36; 3310,61)
(3296,16; 8339,53)
C: (E, N)
(8082,82; 7562,26)
(5201,01; 3310,14)
(3297,96; 8339,62)
Si sono ricavate nel sistema interno le coordinate dei punti D(6051,21; 9121,69);
E(5850,18; 6600,10); F(2713,02; 5700,99).
Ricavare i parametri di rototraslazione con variazione di scala nel caso dell’uso di sei
parametri (due traslazioni, due rotazioni, due fattori di scala, come nell’esempio delle
dispense).
Ricavare i quattro parametri di rototraslazione con variazione di scala (scala, due
traslazioni ed una rotazione).
Con i risultati precedenti ricavare le coordinate nel sistema cartografico di tutti i punti:
A, B, C, D, E, F.
Ricavare con i risultati precedenti gli scarti sulle coordinate del sistema cartografico.
Ricavare le coordinate dei punti A, B e C nel caso in cui si imponga un fattore di scala
λ=1.
7.
Di un appezzamento rettangolare si conoscono le dimensioni: a=30 m ±0,01 m;
b=40m ±0,01 m.
Si vogliono determinare la superficie media e lo scarto quadratico medio della
superficie.
132
ESERCIZI DI TOPOGRAFIA
8.
Della rete planimetrica compensata con CALGE alle esecitazioni:
− riordinare il libretto delle misure;
− ricavare per ogni strato per le direzioni azimutali la direzione media e lo sqm
della direzione.
Applicando queste misure e questi sqm compensare la rete con CALGE.
Eseguire la simulazione della stessa rete.
Commentare i risultati (tabulati e grafici).
9.
Dato un punto P di coordinate geodetiche:
ϕ= 45”; λ=10°; h=500 m
ricavare il potenziale normale in P e la gravità normale.
10.
Del punto P di coordinate ellissoidiche (ellissoide GRS80):
latitudine= 45°15’; longitudine= 9°; h=200 m; deviazione della verticale ξ=30”; η=-20”;
ondulazione N=42,2 m;
calcolare le coordinate naturali.
Calcolare le coordinate geografiche di un secondo punto Q che nel riferimento
cartesiano locale con origine in P dista Dx=1000 m; Dy=-500 m; dZ=-0,5 m.
11.
Due punti P e Q hanno di coordinate ellissoidiche (GRS80):
P: ϕ= 45°15’; λ= 9°; h=200 m;
Q: ϕ= 45°35’; λ= 9° 15’; h=400 m
Si desiderano ricavare le coordinate polari di Q rispetto a P (azimut e lunghezza della
geodetica).
Si desiderano le coordinate geografiche rettangolari di Q.
Si calcolino i due raggi di curvatura in P e Q.
Per il triangolo rettangolo che ha ipotenusa PQ si calcolino gli angoli sull’ellissoide e
sul piano con l’uso del teorema di Legendre.
12.
Il vertice IGM del 1° ordine Superga (asse cupola) ha le seguenti coordinate
geografiche (riferite all’ellissoide internazionale):
ϕ=45°04’48,308”; λ=-4° 41’ 03,307”; h=310,764 m.
Calcolare:
133
ESERCIZI DI TOPOGRAFIA
− i raggi principali di curvatura ed il raggio della sfera locale;
− il raggio di curvatura di una sezione normale di azimut α=45° e di una obliqua
inclinata di β=30° rispetto alla normale n’;
− il raggio del parallelo.
13.
Si consideri la geodetica uscente con un azimut α=40° da un punto di latitudine ϕ=44°;
λ=9°.
Calcolare l’azimut della geodetica in P’ e P” di latitudine ϕ’=45° e ϕ”=46° con i
parametri dell’ellissoide di Hayford.
14.
Verificare i teoremi della geodesia operativa.
A partire dal vertice IGM di Superga considerare una geodetica uscente avente azimut
α=100° e una lunghezza di 100, 500, 1000, 10000, 20000 km.
15.
Sia dato:
P: ϕ= 45°15’18”; λ= 9° 20’ 30”; sull’ellissoide di Hayford.
Determinarne le coordinate Gauss Boaga nel sistema Italiano RM 40.
Determinare il modulo di deformazione lineare puntuale.
Di un secondo punto:
Q : ϕ= 45°10’15”; λ= 9° 10’ 30”
determinare distanza cartografica e distanza ellissoidica passando attraverso le
coordinate cartografiche.
Determinare la distanza ellissoidica come problema geodetico.
Di un punto di coordinate cartografiche Gauss Boaga (E=1424458,59; N=4982934,37)
determinare le coordinate geografiche.
16.
Siano dati:
P: ϕ= 45°15’18”; λ= 9° 20’ 30”;
e un secondo punto:
Q : ϕ= 45°10’15”; λ= 9° 10’ 30” sull’ellissoide di Hayford.
Determinarne le coordinate Gauss Boaga nel sistema Italiano RM 40.
Determinare l’angolo di convergenza delle trasformate in P.
Determinare l’angolo alla trasformata della corda.
134
ESERCIZI DI TOPOGRAFIA
17.
Date le coordinate di Monte Bracco nella cartografia Italiana:
ϕ= 44°40’49,072”; λ=-5° 06’ 47,543”; longitudine riferita a Monte Mario,
calcolare le coordinate cartografiche ed il modulo di deformazione lineare.
Date le coordinate di Monte Pagliano:
ϕ= 44°32’21,594”; λ=-5° 0’ 11,276”;
calcolare il modulo di deformazione lineare per elementi finiti e la distanza
sull’ellissoide fra i due punti.
Data l’altezza h=1306,56 m di Monte Pagliano e h=988,77 m di Monte Pagliano,
calcolare la distanza reale fra i punti.
Calcolare l’azimut di Monte Pagliano rispetto a Monte Bracco.
18.
Della variabile statistica non ordinata rappresentata dai valori:
(3 3 2 4 5 6 4 5 3 4 3 5 6 4 2 5)
calcolarne media, sqm, le radici cubiche e quarte dei momenti del terzo e quarto
ordine della variabile scarto.
19.
Calcolare la media e lo sqm della variabile continua y = e
positivo dei reali e verificarne il teorema di Tchebycheff.
−x
definita nel semiasse
20.
Esiste correlazione lineare tra il fenomeno che ai tempi t =1,2,3...10 vale:
x= 2, 4, 5, 7, 8, 9, 12, 10, 14, 17
ed il fenomeno che per gli stessi tempi vale
y= -4, -2, -1, -1, 0, 1, 2, 4, 4, 6?
Qual è l’indice di correlazione lineare?
21.
Calcolo e compensazione empirica di una poligonale chiusa. Sono misurati gli angoli
(gon) e le distanze:
9 0 1 = 8,5128
9-0 = 5173,35 m
0 1 2 = 209,9230
0-1 = 659,09 m
1 2 3 = 267,3784
1-2 = 937,85 m
2 3 4 = 146,7091
2-3 = 779,45 m
3 4 5 = 179,2646
3-4 = 1234,80 m
135
ESERCIZI DI TOPOGRAFIA
4 5 6 = 173,8187
4-5 = 1119,23 m
5 6 7 = 163,4011
5-6 = 869,47 m
6 7 8 = 160,8309
6-7 = 672,22 m
7 8 9 = 166,5637
7-8 = 820,91 m
8 9 0 = 123,5993
8-9 = 468,5 3m
Si fissi l’origine nel punto 9 e l’asse X diretto verso il punto 0.
Si compensi rigorosamente con CALGE la stessa poligonale.
22.
Siano date le coordinate di quattro punti in un sistema locale:
1(120,37; 85,95); 2(215,51; 321,07); 3(150,14; 412,30); 4(392,12; 49,75).
Dei punti 1 e 2 sono note le coordinate nel sistema cartografico:
1’(1214,17; 1417,61); 2’(1638,56; 1338,59).
Si vogliono trovare i parametri della rototraslazione con variazione di scala (quattro
parametri) fra i due sistemi.
Si vogliono trovare le coordinate dei punti 3 e 4 nel sistema cartografico.
Fissato, (imposto cioè) un fattore di scala λ=1 determinare le coordinate dei punti 1, 2,
3 e 4 nel sistema cartografico.
23.
Sia data una variabile statistica i cui valori sono raggruppati in classi:
10 − 12 12 − 15 15 − 20 20 − 30 30 − 50
0,04
0,18
0,40
0,20
0,18
Si riportino in una tabella le ampiezze degli intervalli, le densità di frequenza e le
frequenze cumulate.
Si disegnino l’istogramma e la funzione cumulativa di frequenza.
Si calcolino valore medio e scarto quadratico medio.
24.
Sia data la variabile doppia:
x =1
x=2
x=3
y=4
0,1
0,1
0
y=5
0,2
0,2
0,1
y=9
0,1
0
0,1
x=4
0
0
0,1
136
ESERCIZI DI TOPOGRAFIA
ricavare le frequenze marginali, i valori medi, gli scarti quadratici medi, la covarianza e
l’indice di correlazione lineare.
25.
Di un triangolo ABC si conoscono:
A(4; 5); B(11; 2); α= 90 gon ±0,1 gon e β=40 gon ±0,1 gon.
Ricavare le coordinate del punto C.
Ricavare la matrice di varianza covarianza delle coordinate del punto C.
Ricavare lo scarto quadratico medio delle due coordinate di C.
Ricavare i semiassi principali dell’ellisse d’errore sul punto C.
Ricavare lo scarto quadratico medio della superficie del triangolo ABC.
26.
Su un punto di coordinate:
ϕ= 45”; λ=10°; h=500 m (ellissoide di riferimento: Hayford)
si sono misurati distanza inclinata l=1000 m e distanza zenitale z=60 gon.
Calcolare la distanza ridotta alla superficie di riferimento.
Calcolare la distanza sulla cartografia italiana in una carta in scala 1:2000.
27.
Si faccia l’ipotesi che per tre punti A(0; 1), B(2; 2) e C(4; 3,1) passi una retta di
equazione y=ax+b.
Ricavare i parametri a e b.
Ricavare gli sqm di questi parametri.
Ricavare la covarianza e l’indice di correlazione lineare tra a e b.
28.
Fra quattro punti: 1, 2, 3 e 4, si misurano sei dislivelli, tutti con la stessa precisione. Le
misure sono:
∆12=2,01 m; ∆23=1,01 m; ∆34=0,99 m; ∆41=-3,01 m; ∆13=3,00 m; ∆24=2,00 m.
Fissata la quota del punto 1: Q1=0 m,
calcolare le quote dei punti 2, 3 e 4;
calcolare gli sqm di queste quote;
calcolare gli sqm degli scarti;
calcolare le ridondanze locali.
137
ESERCIZI DI TOPOGRAFIA
29.
Si sono eseguite cinque misure angolari con tre strumenti diversi, che hanno sqm
intrinseco ±10 cc; ±15 cc; ±12cc. Si vuole conoscere il valore più probabile dell’angolo
misurato ed il suo sqm.
Le misure sono: 70,0010 ± 15 cc; 70,0000 ± 10 cc; 69,9990 ± 12 cc; 70,0003 ± 15 cc;
70,0004 ± 12 cc.
Ricavare il valore più probabile dell’angolo per un qualsiasi numero di misure yi che
abbiano sqm σi.
Ricavare il valore dello sqm angolare nel generico caso precedente.
30.
Fra i punti A e B, la cui distanza sull’ellissoide è di 3472,12 m, è stata eseguita una
livellazione trigonometrica reciproca con osservazioni contemporanee, impiegando un
teodolite.
Collimando i punti a terra si sono misurati gli angoli zenitali:
ϕ1= 90,4118 gon e ϕ2= 102,0173 gon.
Assumendo R=6377 m, calcolare la quota del punto B, sapendo che la quota di A è
356,96 m.
Assumendo sqm angolare di ± 15 cc e sqm della distanza di ± 0,15 m, calcolare la
precisione del dislivello.
31.
Facendo stazione con un teodolite di altezza strumentale h=1,49 m su un punto A su
di una collina, si è collimata, con visuale tangente, la superficie libera del mare
(l’orizzonte marino), effettuando le letture zenitali: φs=100,4148 gon e φd= 300,5150
gon. Ponendo il coefficiente di rifrazione K=0,15 e R=6378 km
− calcolare la quota del punto osservante, assumendo che la quota
dell’orizzonte sia uguale a zero
Assumendo sqm angolare di ± 15cc e sqm del coefficiente K=± 0,01,
calcolare la precisione della quota di A.
32.
Di un appezzamento triangolare si misurano le coordinate con un digimetro. Le
coordinate in metri valgono: A(-3, 2); B(-3, 4); C(6, -2). Sapendo che entrambe le
coordinate e per tutti i punti lo scarto quadratico medio di acquisizione è di ± 0,05 m;
− valutare con la formula di Gauss la superficie media dell’appezzamento
triangolare;
− valutare lo scarto quadratico medio della superficie;
− ricavare l’espressione dello scarto quadratico medio di una qualunque
superficie misurabile attraverso le coordinate dei suoi vertici.
138
ESERCIZI DI TOPOGRAFIA
33.
Di un campo triangolare si sono misurati con una bindella metrica (nastro d’acciaio) i
tre lati. Questi valgono: a=29,52 m; b=39,64 m; c=49,77 m; tutte le misure hanno sqm
di ± 1 cm:
− ricavare il valore della superficie media del campo;
− ricavare lo sqm della superficie precedentemente ricavata.
34.
Livellazione geometrica di precisione (pag. 45 eserciziario Monti Sansò). Si sono
misurati i dislivelli (espressi in mm):
Brera-P.Venezia
P.Venezia P. Ticinese
P. Ticinese Brera
P. Ticinese Baracca
Baracca Brera
Baracca P. Venezia
177,4 mm
5584,8 mm
-5763,3 mm
-4953,5 mm
-809,4 mm
-634,4 mm
1,74 km
4,40 km
3,25 km
2,43 km
2,49 km
4,65 km
Fissata la quota di Brera=-768,0 mm, ricavare le quote compensate di tutti i vertici
utilizzando CALGE.
Simulare la rete compensata in precedenza.
Descrivere il diverso risultato di compensazione e simulazione.
Calcolare l’errore quadratico medio chilometrico.
35.
Intersezione multipla diretta (pag. 50 eserciziario Monti Sansò).
Si sono misurati da quattro vertici 1, 2, 3 e 4, in direzione di un punto P, gli angoli
α1=[P 1 2]=114,35957 gon; α2 =[P 2 3]= 58,87423 gon; α3=[P 3 4]= 51,36738 gon;
α4=[3 4 P] =110,95636 gon.
Le coordinate dei vertici sono:
1(830,71; 1098,48); 2(1486,24; -46,09); 3(665,24; -282,45); 4(0; 0).
Ricavare le coordinate di P e la matrice di varianza covarianza delle coordinate.
Eseguire la simulazione e la compensazione con CALGE e descriverne i risultati.
Visualizzare le ellissi d’errore con CALGE2xf e Autocad.
36.
Risolvere il problema di intersezione in avanti semplice delle esercitazioni strumentali.
Trascrivere in pulito il libretto delle misure.
Ricavare le coordinate dei punti collimati.
Visualizzare in scala opportuna tali coordinate.
Commentare i risultati ottenuti.
139
ESERCIZI DI TOPOGRAFIA
37.
Intersezione multipla inversa (pag 61 eserciziario Monti Sansò).
Siano note le coordinate di quattro punti collimati con un teodolite da un quinto punto
P: 1(1512118,23; 5056867,02); 2(1511264,84; 5055271,79);
3(1510182,23; 5055934,36); 4(1510154,65; 5057244,30).
Le letture azimutali al teodolite valgono:
L1=0; L2=146,6244; L3=200,1318; L4=252,6461.
Nell’ipotesi che tutte le letture abbiano medesima precisione: σ=± 0,001 gon:
− ricavare le coordinate di P e la matrice di varianza covarianza delle coordinate.
Eseguire la simulazione e la compensazione con CALGE e descriverne i risultati.
Visualizzare le ellissi d’errore con CALGE2xf e Autocad.
38.
Intersezione inversa distanziometrica.
Si conoscono le coordinate di tre punti 1(0, 0), 2(3, 4), 3(9, 4).
Con un nastro centimetrato dal punto 4 si misurano le distanze:
a=1-4=5,0m; b=2-4=5,1m; c=3-4=4,98m.
Tutte le distanze hanno ugual precisione.
Calcolare le coordinate del punto 4, la matrice di varianza covarianza delle cordinate, i
semiassi principali dell’ellisse d’errore.
140
APPENDICE A
La relazione tra l'ellissoide di errore e la matrice di varianza covarianza
Partiamo da un esempio bidimensionale. Data la matrice di varianza covarianza:
σ 2y
N xy = n
− σ xy
− σ xy
σ 2x
A1
Il determinante di C è una costante che vale c = σ 2x σ 2y − σ 2xy
N xy = Cxy−1;
det( N xy ) = n = c −1
σ 2y
N xy = n
− σ xy
− σ xy
σ 2x
A2
A3
Fissato ∆χ2=1, l'equazione:
A4
x
( x, y )C xy−1 =1
y
A5
esprime l'equazione di una ellisse di «equiprobabilità». Svolgendo infatti i
prodotti si ha:
(x
σ 2y x − σ xy y
− 1 = 0
y )n
2
−
σ
x
σ
y
xy
x
A6
Essendo n≠0, dividendo per n si ottiene l'equazione della conica:
σ 2y x 2 − σ xy xy − σ xy xy + σ 2x y 2 − c = 0
A7
Si può dimostrare facilmente che questa conica è una ellisse.
Cerchiamo la proiezione della 7 sull'asse delle x, cioè cerchiamo la tangente
dell'ellisse con la retta x = cost = u
σ 2y u2 − 2σ xy uy + σ 2x y 2 − c = 0
A8
141
APPENDICE A
La soluzione in y deve essere unica, in quanto la retta che si cerca deve essere
tangente e non secante, deve cioè annullarsi il discriminante ∆=b2-4ac (oppure
(b/2)2-ac) rispetto alla variabile y.
In questo caso:
a = σ 2x ;
b = −2σ xy u;
c = σ 2y u − c
u 2 σ 2xy − σ 2y σ 2x u 2 + σ 2x c = 0
A9
u 2 (σ 2y σ 2x − σ 2xy ) = cσ 2x
A10
Notiamo che il termine in parentesi quadra rappresenta il determinante c di Cxy ;
dividendo allora entrambi i membri per c ed eseguendo la radice quadrata si
ottiene:
u = ±σ x
A11
Allo stesso modo si dimostra che la proiezione sull'asse y vale v = ± σ y .
Esempio numerico bidimensionale
Data:
3 1
1 2 − 1
c = det C xy = 5 ; N xy =
C xy =
5 − 1 3
1 2
Scomponendo in valori singolari si trova:
C xy = RΛR T
0,8507 − 0,5257
R =
0,5257 0,8507
0
3,618
Λ =
1,382
0
σ 2I = 3,618; σ I = ±1,902;
σ 2II = 1,382; σ II = ±1,176
Si nota la proprietà che la traccia tr(Cxy)=5 per qualunque rotazione, infatti
tr(Cxy)=d2 =cost dove:
d 2 = σ 2x + σ 2y =σ 2I + σ 2II
Essendo σx la proiezione dell'ellisse sull'asse x e σy la proiezione dell'ellisse
sull'asse y. Questa proprietà esprime geometricamente che è costante la
lunghezza della diagonale di qualunque rettangolo che circoscrive l'ellisse:
d 2 = ( 2 )2 + ( 3) 2 = 5
142
APPENDICE A
x
d
y
Si noti ancora che σ 2I = 3,168 ≠ 5 , che la direzione del semiasse principale σI
vale arcos(0,8507) = 31°,712 mentre la direzione della diagonale vale:
arctang( 2
3
) = 39°,232
Si noti che l'intersezione dell'ellisse con gli assi y=0 e x=0 vale:
± 1,581 ≠ 3 e ± 1,292 ≠ 2
Matrice di varianza covarianza tridimensionale (3D)
Per brevità indichiamo con σ ij i termini della matrice di varianza covarianza:
C xyz
σ11
= σ12
σ3
1
σ12
σ 22
σ 33
σ13
σ 32
σ 33
A12
con det C xyx = δ . Definita Nxyz la sua matrice inversa:
−1
N xyz = C xyz
n11
= n12
3
n1
n12
n 22
n 23
n13
n 23 ;
n33
det N =
1
=∆
δ
A13
L'equazione dell'ellissoide di «equiprobabilità», con ∆χ 2 = 1 si può scrivere:
143
APPENDICE A
( x y z) ⋅ C
−1
xyz
x
x
⋅ y - 1 = 0 cioè ( x y z ) ⋅ N xyz ⋅ y - 1 = 0
z
z
A14
e sviluppando i prodotti si ottiene:
n11 x 2 + n22 y 2 + n33 z 2 + 2n12 xy + 2n23 yz + 2n13 xz − 1 = 0
A15
Cerchiamo la proiezione nel piano xy, cioè cerchiamo il luogo dei punti su (x,y)
per cui l'ellissoide è tangente ad una retta parallela all'asse z: x=u=cost;
y=v=cost è l'equazione della retta che cerchiamo. Si avrà:
n33 z 2 + 2 z (n23 v + n13 u ) + (n11u 2 + n22 v 2 + 2n12 uv − 1) = 0
A16
La soluzione in z deve essere unica, in quanto la retta deve essere tangente e
non secante l'ellissoide, perciò si deve annullare il discriminante ( b ) 2 − ac
2
rispetto a z.
a = n33 ;
∆ =0⇒
b = 2( n23 v + n13u );
c = ( n11u 2 + n22 v 2 + 2n12 uv − 1)
(n 23v + n13u ) 2 − n33 ( n12 u 2 + n22 v 2 + 2n12 uv − 1) = 0
A17
Sostituendo ancora per comodità ad u→ x ed a v→ y e sviluppando
(n23 ) 2 y 2 + (n13 ) 2 x 2 + 2n 23n13 xy − n33n11 x 2 − n33n22 y 2 − 2n12 n33 xy + n33 = 0
A18
( n 3 ) 2 − n1 n 3
(n 3 ) 2 − n 2 n 3
n3n3 − n 2 n3
x 2 1 3 1 3 + y 2 2 3 2 3 + 2 xy 1 2 3 1 1 − 1 = 0
n3
n3
n3
A19
La 19 è l'equazione di una ellisse. Ritorniamo ora all'equazione A7 riscritta così:
[ ]
[ ]
[
]
x 2 σ 22 + y 2 σ11 + 2 xy − σ12 − det(C xy ) = 0
A20
det(C xy ) = (def.) c , cerchiamo di invertire N xyz per ricavare σ11 σ12 ... σ ij
σ11 = δ ⋅ (n22 n33 − (n 23 n 2 )
A21
σ 22 = δ ⋅ (n13 n33 − (n13 ) 2 )
A22
σ12 = δ ⋅ (n13 n 23 − n12 n33 )
A23
3
Sostituendo A21 A22 e A23 nella A19 si ha (δ = 1 / ∆) :
− σ2∆
− σ1 ∆
σ2∆
x 2 32 + y 2 31 + 2 xy 13 + 1 = 0
n3
n3
n3
che va confrontata con la 20:
144
A24
APPENDICE A
1
− σ 22
σ12
2 − σ1
2
+
+
x2
y
xy
+1 = 0
c
c
c
A25
Entrambe sono equazioni di una ellisse ma differiscono di una costante di scala
che vale:
∆
3 ⋅ c
n3
A26
Dimostriamo che tale costante vale 1, cioè:
n33 = c∆ =
c
δ
A27
Basta invertire la matrice 12 per il solo elemento σ 33 ; il suo inverso n33 vale
infatti:
n33 =
[
]
1 1 2
c
σ1σ 2 − (σ12 ) 2 =
δ
δ
C.V.D.
Nella A25 la costante c definita dopo la A20 vale c=n-1 , dunque la proiezione di
Cxyz sul piano xy individua una ellisse di equazione identica alla A6:
(x
σ 22
y )n
2
− σ1
− σ 12 x
−1 = 0
σ 11 y
A28
Naturalmente a pari probabilità le ellissi (a due dimensioni) estratte da Cxyz non
hanno la stessa scala, come pure σx ad una dimensione e a due dimensioni non si
equivalgono. Prendendo ad esempio una probabilità p=99% si ha:
∆χ (1) = 6,63
2
∆χ ( 2 ) = 9,21
2
∆χ (3) = 11,3
2
Partendo da una matrice tridimensionale Cxyz ed estraendo da questa solo σz
oppure (σx , σy) occorrerà moltiplicare questi valori per 11,3 . Allo stesso
modo, partendo da una matrice bidimensionale Cxy ed estraendo da questa solo
σx o σy occorrerà moltiplicare questi valori per 9,21 , mentre è noto che, ad
una dimensione, l'area sottesa dalla normale standard z vale erf(z)=0,99 per
z = ± 6,63 .
145
APPENDICE A
Esempio numerico tridimensionale
C xyz
C
−1
6 2 6
= 2 9 10 det C = δ = 16; tr C xyz = 29
6 10 14
2 − 2,125
1,625
1
1
3
= 0,0625
= N = −2
− 3 det N = =
16
δ
− 2,125 − 3 3,125
σ 2I = 23,832 ;
σ 2II = 5,0442 ;
σ 2III = 0,133 ; σ 2I + σ 2II + σ 2III = cos t = 29
6 2
0,18 − 0,04
C xy = det C xy = 50 N =
2 9
− 0,04 0,12
tr C xy = 15
2
0,4472 − 0,8944 σ I = 10 2
R=
σ + σ II = 15
0,4472 σ II 2 = 5 I
0,8944
σ x (99%) =
6 ⋅ 11,3 = ±8,23
σ y (99%) =
9 ⋅ 11,3 = ±10,08
σ I (99%) =
10 ⋅ 11,3 = ±10,63
σ II (99%) =
5 ⋅ 11,3 = ±7,52
α = −63, 435°
146
σ z = ± 11,3 ⋅ 14 = ±12,58
Scarica