Liceo Scientifico Statale
“G. Galilei” Adria (RO)
Progetto Nazionale Lauree Scientifiche: Matematica
POLO 4
Gianpaolo Valente
Il Progetto Nazionale Lauree Scientifiche
per la Matematica
al Liceo “G. Galilei” di Adria:
diario di un’esperienza avvincente
Gianpaolo Valente
Presentazione
Il Liceo Scientifico Statale “G. Galilei” di Adria è stato scelto per l’Anno Scolastico
2005/2006 come scuola polo per il Progetto Nazionale Lauree Scientifiche per la
Matematica.
Si tratta di un’iniziativa nazionale di notevole importanza, come è dimostrato dagli attori in gioco: l’Ufficio Scolastico Regionale per il Veneto del Ministero
della Pubblica Istruzione, l’Università degli Studi di Padova, e con l’apporto di
Confindustria.
Lo scopo è rilanciare le iscrizioni ai corsi di laurea della Facoltà di Scienze, agendo
fin dalle Scuole Superiori, per rimotivare i giovani nei confronti di queste discipline.
Tale impegno risulta strategico per un Paese come il nostro, che ha raggiunto un
alto grado di sviluppo scientifico e tecnologico.
Gli studenti del Liceo “G. Galilei” hanno risposto positivamente al Progetto, aderendo in molti e con entusiasmo al laboratorio di matematica organizzato
nell’Istituto.
A questi ragazzi va il mio più vivo apprezzamento: hanno saputo avvalersi pienamente di questa importante occasione di arricchimento per la loro formazione
culturale.
Un ringraziamento va ai docenti dell’Università di Padova che hanno seguito i
lavori del polo di Adria e in particolare ai dottori Andrea Giacobbe ed Olga Bernardi,
che sono venuti nell’Istituto a condurre il laboratorio matematico. Sono riusciti a
coinvolgere i ragazzi e a trasmettere il loro entusiasmo di giovani ricercatori.
È da considerare anche il valido contributo del gruppo di docenti della scuola che hanno seguito l’iniziativa, i professori Beatrice Napolitano, Matteo Nicoli e
Gianpaolo Valente.
Quest’ultimo, come coordinatore, ha raccolto il materiale prodotto in questa
primo anno del P.L.S. ad Adria, tenendo un diario della loro esperienza.
Il Dirigente Scolastico
prof. ssa Joëlle Annibalini
Indice
Introduzione
7
1 L’insegnamento di Matematica e Fisica
8
2 Il P.L.S. al Liceo “G. Galilei”
2.1 Perché i sistemi dinamici . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 La progettazione didattica ed organizzativa del Laboratorio del P.L.S.
2.2.1 La dispensa preparatoria . . . . . . . . . . . . . . . . . . . . .
2.2.2 Il ruolo del supporto informatico . . . . . . . . . . . . . . . .
2.2.3 La comunicazione per promuovere l’adesione degli studenti . .
2.2.4 Gli incontri preparatori . . . . . . . . . . . . . . . . . . . . . .
2.3 L’attuazione dei laboratori . . . . . . . . . . . . . . . . . . . . . . . .
2.4 La fase finale: la verifica degli obiettivi raggiunti . . . . . . . . . . . .
2.4.1 Tipologia e contenuti della prova finale . . . . . . . . . . . . .
9
10
11
14
14
17
18
18
20
22
3 Ricadute del P.L.S. sull’attività curricolare
31
Conclusioni
33
Appendici
i
A La dispensa preparatoria per i ragazzi
A.1 Perché proprio i sistemi dinamici? . . . . . . . . . . . . . . . . . . .
A.2 Che cos’è un sistema dinamico? . . . . . . . . . . . . . . . . . . . . .
A.3 Sistema dinamici discreti: il conto in banca . . . . . . . . . . . . . .
A.4 Sistema dinamici continui: esempi dalla fisica . . . . . . . . . . . . .
A.4.1 Una palla lanciata verticalmente verso l’alto . . . . . . . . . .
A.4.2 L’oscillatore armonico semplice . . . . . . . . . . . . . . . . .
A.5 Altri esempi dalla fisica: sistemi dinamici continui lineari e non lineari
A.5.1 Il diagramma nello spazio delle fasi . . . . . . . . . . . . . . .
A.5.2 Dimensione e linearità; dipendenza esplicita dal tempo. . . . .
A.6 Sistemi dinamici continui 1-dimensionali . . . . . . . . . . . . . . . .
A.6.1 L’approccio geometrico: interpretazione di un’equazione differenziale come campo vettoriale . . . . . . . . . . . . . . . .
A.7 Analisi della stabilità . . . . . . . . . . . . . . . . . . . . . . . . . .
A.8 Sistemi dinamici lineari 1-dimensionali . . . . . . . . . . . . . . . . .
A.8.1 La caduta di un grave nell’atmosfera . . . . . . . . . . . . . .
A.8.2 La crescita di una popolazione . . . . . . . . . . . . . . . . . .
5
i
ii
iii
iii
v
v
vi
vii
viii
viii
ix
x
xii
xiv
xv
xvi
A.9 Ricerca degli zeri di una funzione . . . . . . . . . . . . . . . . . . . . xvii
A.10 Come ottenere un sistema dinamico discreto da uno continuo e viceversa xix
A.10.1 Un esempio di soluzione numerica . . . . . . . . . . . . . . . . xxi
A.11 Il metodo delle fasi per l’oscillatore armonico lineare . . . . . . . . . xxii
A.11.1 Il ritratto di fase . . . . . . . . . . . . . . . . . . . . . . . . . xxii
A.11.2 L’approccio geometrico per sistemi in 2 dimensioni . . . . . . xxiii
A.12 Dipendenza da parametri: biforcazioni e catastrofi . . . . . . . . . . xxiv
A.13 Sistemi dinamici discreti e mappe 1-dimensionali . . . . . . . . . . . xxv
A.13.1 Premessa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . xxv
A.13.2 Alcune definizioni . . . . . . . . . . . . . . . . . . . . . . . . xxvi
A.13.3 Analisi geometrica dell’iterazione di una funzione: il diagramma a ragnatela . . . . . . . . . . . . . . . . . . . . . . . . . . xxvii
A.13.4 Comportamento di un sistema lineare discreto 1-dimensionale xxviii
A.13.5 Sistemi dinamici discreti 1-dimensionale non lineari . . . . . . xxix
A.14 La nostra attività di laboratorio . . . . . . . . . . . . . . . . . . . . . xxxi
A.14.1 L’equazione logistica . . . . . . . . . . . . . . . . . . . . . . . xxxii
B I lavori dei ragazzi
B.1 Sistemi dinamici: discreti e continui . . . . . . . . . . .
B.2 Modelli matematici per la dinamica di una popolazione
B.3 Love Affairs . . . . . . . . . . . . . . . . . . . . . . . .
B.4 Sull’effetto farfalla . . . . . . . . . . . . . . . . . . . .
B.5 Crescita cellule tumorali . . . . . . . . . . . . . . . . .
B.6 Applicazioni di Feigenbaum . . . . . . . . . . . . . . .
6
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
I
III
XV
XXIII
XXXI
XXXIX
XLIV
Introduzione
In queste note intendo presentare l’esperienza condotta presso il Liceo Scientifico
Statale “G. Galilei” di Adria nell’ambito del Progetto Nazionale Lauree Scientifiche
per la matematica, nell’anno scolastico 2005/2006.
Il 12 ottobre 2005 ricevetti dall’Ufficio Scolastico Regionale l’incarico di coordinatore del gruppo di docenti che avrebbero partecipato alla prima annualità per il
polo di Adria. Il gruppo comprendeva i colleghi professori Beatrice Napolitano e
Matteo Nicoli.
Il Progetto Lauree Scientifiche rappresenta un’importante iniziativa curata dall’Ufficio Scolastico Regionale, realizzata unendo energie dal mondo della Scuola e
dell’Università e col sostegno dell’Impresa, per rilanciare nei giovani l’interesse per
le discipline scientifiche.
Potrebbe sembrare che tale opera risulti superflua per un Liceo Scientifico come
il nostro, in cui l’utenza che si iscrive è generalmente motivata nei confronti di queste
materie.
Al contrario, anche nella nostra realtà locale percepiamo un calo di motivazione
di molti ragazzi per lo studio delle scienze, che coincide con una diminuzione delle
iscrizioni a tali percorsi universitari.
In questo contesto, è, a mio avviso, inevitabile ripensare al ruolo delle discipline
scientifiche “dure”, in particolare della Matematica e della Fisica. Per noi insegnanti,
laureati in quest’area, forse è necessario fare un atto di umiltà e non ritenere automatico il fatto che uno studente, seppure di Liceo Scientifico, debba appassionarsi
alla Matematica e alla Fisica.
In questo diario, presentando il Progetto Lauree Scientifiche ad Adria, intendo
evidenziare come un’attività integrativa, assolutamente nuova, abbia saputo catalizzare l’interesse e l’impegno volontario di un gruppo di studenti del nostro Liceo
‘G. Galilei”.
Anche nella nostra scuola, rispettando le linee guida nazionali del progetto per la
Matematica, è stato realizzato un laboratorio matematico, destinato ad un gruppo
volontario di alunni, particolarmente motivati verso la disciplina. L’iniziativa ha
suscitato curiosità ed entusiasmo, sollecitando le doti migliori dei nostri studenti.
Come docente coinvolto nel progetto, sono oggi consapevole che tale attività ha
avuto ricadute sulla mia azione didattica complessiva.
Parlerò in questo diario delle problematiche legate alla scelta degli argomenti,
della necessità di pensare e strutturare il lavoro in laboratorio di Informatica, di
come sia stato utile rivedere in alcune parti la programmazione curricolare, per
affrontare argomenti che sono risultati poi utili non solo ai ragazzi direttamente
coinvolti nell’attività pomeridiana, ma a tutta la classe in cui erano inseriti.
7
Preziosi sono stati gli scambi professionali, il lavoro e le discussioni coi colleghi
Beatrice Napolitano e Matteo Nicoli; ho potuto approfittare della visione della Matematica del secondo (appassionato di analisi e teoria dei numeri) e dell’esperienza,
conoscenza e capacità di comprendere i ragazzi della prima, che mi ha aiutato a
commisurare l’approccio didattico alle esigenze e aspettative degli studenti.
Indispensabile è stata naturalmente la collaborazione coi giovani docenti ricercatori dell’Università di Padova, i dottori Andrea Giacobbe ed Olga Bernardi, che
hanno partecipato con competenza e dedizione al progetto, guidando il laboratorio
matematico di Adria. Desidero ricordare i preziosi consigli dei professori Franco
Cardin e Francesco Fassò, e naturalmente del coordinatore regionale del P.L.S. per
la Matematica, prof. Benedetto Scimemi, che ci ha sempre incoraggiato nel nostro
lavoro.
Come coordinatore locale, ho inoltre potuto apprezzare la competenza, pazienza
e sollecitudine del prof. Paolo Jacolino dell’Ufficio Scolastico Regionale, su cui abbiamo sempre potuto contare non solo per le questioni amministrative, ma anche
per il suo fattivo appoggio e sostegno.
Un sincero ringraziamento va al Dirigente Scolastico del Liceo Scientifico “G.
Galilei”, prof. ssa Joëlle Annibalini, a cui debbo il mio coinvolgimento nell’iniziativa
e che ha sempre appoggiato e creduto nell’impegno mio e dei colleghi del gruppo di
Adria.
Un grazie particolare va infine ai nostri ragazzi che hanno dato vita, col loro
entusiasmo, al nostro laboratorio matematico sui sistemi dinamici.
A tutti loro è dedicato questo libretto, che si conclude proprio con alcuni dei
lavori che hanno prodotto nell’ambito del progetto, raccolti nell’appendice B.
1
L’insegnamento di Matematica e Fisica
La necessità di rilanciare l’insegnamento della Matematica e della Fisica nella Scuola Superiore è un problema molto sentito in Italia da diversi anni. Nonostante la
situazione degli iscritti alle Facoltà scientifiche “dure” sia peggiorata da una decina d’anni a questa parte, sarebbe sbagliato dire che non è stato fatto nulla per
rispondere a questi bisogni.
Se è vero che nella Scuola liceale, pur essendo datati 1952, i programmi tradizionali di Matematica e Fisica sono sostanzialmente quelli della Riforma Gentile del
1923, già dagli anni Settanta ed Ottanta, nella Scuola Secondaria Superiore, si sono
diffuse varie sperimentazioni di tipo scientifico.
Nel 1985 venne iniziato dal Ministero della Pubblica Istruzione il Piano Nazionale per l’Informatica (P.N.I.) per l’aggiornamento degli insegnanti di Matematica
8
e Fisica, al fine di introdurre l’Informatica nella Scuola. Vennero elaborati nuovi
programmi di Matematica e Fisica, in cui (tranne nelle scuole tecniche ad indirizzo
informatico) si integrava l’insegnamento dell’Informatica. I nuovi programmi furono
dapprima formulati nel 1985, poi rivisti con la C.M. n. 24 del 6 febbraio 1991 e la
C.M. n. 615 del 27 settembre 1996, per il triennio dei Licei e il secondo biennio
dell’Istituto Magistrale (oggi soppresso).
Già dai primi anni novanta il Liceo Scientifico “G. Galilei” ha aderito al P.N.I.,
sia per Matematica che per Fisica, arricchendo cosı̀ la propria offerta formativa.
Anche oggi, la sperimentazione P.N.I. di Matematica, in particolare, riporta
buoni successi in termini di iscritti.
2
Il P.L.S. al Liceo “G. Galilei”
Dopo aver ricevuto ed accettato dal Dirigente Scolastico l’incarico di partecipare al
progetto, il gruppo locale si è concentrato sulla scelta degli argomenti, oggetto del
Laboratorio matematico. Ci eravamo dati questo compito in occasione delle due
riunioni organizzative di Settembre presso il Dipartimento di Matematica Pura ed
Applicata dell’Università di Padova.
Dopo una presentazione dell’iniziativa da parte del coordinatore scientifico prof.
Benedetto Scimemi e del responsabile per l’U.S.R. Preside prof. Paolo Jacolino,
furono illustrate varie proposte da parte degli Universitari coinvolti nel progetto. Le
tematiche presentate spaziavano dalla Crittografia, alla Matematica per l’Economia
(Ricerca operativa); dalla Psicologia della percezione, alla Matematica statistica e
stocastica.
Il denominatore comune di tutte, discusso dai partecipanti alle riunioni di Padova, era quello di offrire ai ragazzi argomenti di lavoro che rappresentassero veri e
propri problemi in cui i partecipanti ai laboratori potessero esercitare un ruolo da
protagonisti, fin dai primi incontri.
In sintesi, i laboratori di Matematica dovevano avere le seguenti caratteristiche:
a) essere rivolti a gruppi volontari di ragazzi, particolarmente motivati verso la
disciplina, delle classi Quarte o Quinte;
b) svolgersi in orario pomeridiano, al di fuori del normale impegno scolastico,
in cinque incontri di tre ore ciascuno, da effettuare in un periodo temporale
limitato (dell’ordine di un mese, un mese e mezzo);
c) privilegiare modalità didattiche alternative alla tradizionale lezione frontale,
in cui i ragazzi fossero protagonisti;
9
d) richiedere un bagaglio teorico di cui gli studenti fossero già in gran parte in
possesso, per limitare al massimo la necessità di istruirli con tecniche di lezione
frontale;
e) essere tali da promuovere la comunicazione ed il travaso di esperienze tra i
diretti partecipanti e gli altri studenti delle classi coinvolte.
Il nostro gruppo concordò che uno degli argomenti che potevano risultare più
vicini agli interessi degli studenti ed essere più affini ai nostri interessi erano i sistemi dinamici. Si decise allora di contattare il prof. Franco Cardin, ordinario di
Fisica Matematica presso il Dipartimento di Matematica Pura ed Applicata dell’Università di Padova, proponendo1 per il P.L.S. del polo di Adria “lo studio di sistemi
dinamici semplici, che ammettano flussi 1- o al più 2-dimensionali tali da costituire una
modellizzazione matematica nell’ambito della biologia, della fisica o della chimica. In
particolare, l’esame di sistemi iterativi (discreti) e l’eventuale applicazione a fenomeni
caotici o descrivibili tramite strutture frattali”.
Il prof. Franco Cardin, che aveva conosciuto il sottoscritto in occasione dell’esame da contro-relatore di una tesi di laurea in Fisica Matematica della quale ero
stato correlatore, si dimostrò disponibile ad aiutarci, facendoci conoscere due giovani e validi ricercatori, il dott. Giacobbe e la dott. ssa Bernardi, che insieme a noi
avrebbero guidato i ragazzi di Adria nei laboratori pomeridiani.
2.1
Perché i sistemi dinamici
Fin da subito, discutendo coi colleghi, ero convinto che non solo era necessario
rispondere ai requisiti esposti, ma che era importante motivare i nostri ragazzi a
partecipare all’iniziativa.
La mia principale preoccupazione era quella di non ridurre il laboratorio di Matematica ad una esperienza isolata, assolutamente slegata dalla normale programmazione curricolare.
Speravo che i ragazzi si rendessero conto che avrebbero fatto qualcosa di alternativo, forse anche con una dimensione ludica, ma che i contenuti che proponevamo
potevano essere utili per il loro corso di studi e per la loro formazione culturale.
Avevo ben presente, infatti, i principali obiettivi formativi ed educativi descritti
nel P.O.F. del nostro Istituto, specialmente “l’allargamento degli orizzonti socioculturali; l’accrescimento globale delle capacità progettuali; lo sviluppo armonico della personalità, del senso della responsabilità, della coscienza critica; la capacità di
1
Di seguito cito dal testo della lettera inviata al prof. Cardin, contattato dal nostro gruppo per
la consulenza scientifica.
10
valutare le situazioni e di prendere decisioni, soprattutto in riferimento alle scelte
scolastiche e professionali.”
Le motivazioni scientifiche della scelta da noi effettuata, cosı̀ come le abbiamo
esposte ai ragazzi, si possono leggere a pag. ii, nel paragrafo A.1 della dispensa
“Introduzione ai sistemi dinamici” che riporto in appendice a questo libretto.
Si tratta di alcune note preparatorie all’attività, destinate ai ragazzi, curate dal
gruppo locale, e messe a disposizione di tutti nel sito web del nostro Istituto2 .
2.2
La progettazione didattica ed organizzativa del Laboratorio del P.L.S.
L’attività progettuale per i laboratori del P.L.S. è avvenuta su due piani: uno scientifico ed uno didattico organizzativo. Il lavoro di coordinamento tra il gruppo locale
e la componente dell’Università di Padova è stato per me avvincente, impegnativo ma facilitato dalla disponibilità, competenza e passione dimostrata da tutti i
partecipanti.
Cercherò in questo diario di sintetizzare i vari momenti di quella che potrei
chiamare avventura, la quale è stata per me non solo occasione di arricchimento
professionale, ma soprattutto umano; molte sono infatti le emozioni e i ricordi che
vengono alla mia mente, ora che tento di trarre un bilancio di quanto è stato fatto.
Tali sentimenti derivano dall’aver lavorato in squadra non solo nella fase progettuale
con i membri locali ed universitari, ma dall’esperienza effettiva avuta con gli studenti.
Dopo il primo incontro a Padova col prof. Cardin in data 12 ottobre 2005, nel
quale discutemmo delle aspettative che avevamo sul lavoro da condurre e sulla possibilità di avvicinare i ragazzi al mondo della Fisica matematica, gli aspetti scientifici
presero forma con le proposte portate dal dott. Giacobbe nelle riunioni del 21 ottobre
e nell’ultimo incontro del 21 dicembre.
Nel frattempo, coi colleghi del gruppo locale, iniziammo ad esaminare in modo
puntuale alcune questioni chiave, tra cui i pre-requisiti necessari e le modalità per
promuovere l’adesione degli studenti.
Nel piano di lavoro preparato per il Dirigente Scolastico, il gruppo locale aveva individuato “cosa gli studenti dovevano conoscere e saper fare per svolgere proficuamente
l’attività:
1. La nozione di funzione reale di variabile reale f : R −→ R e le sue principali
proprietà.
2
L’indirizzo è http://www.galileiadria.it.
11
2. Cosa significa l’operazione di composizione di funzioni.
3. Il concetto di grafico di una funzione f : R −→ R.
4. Le Funzioni goniometriche.
5. La Funzione esponenziale.
6. Saper analizzare il cambiamento della natura qualitativa delle soluzioni di problemi
di geometria piana, solida o analitica dipendenti da parametri.
7. La nozione di successione e di limite di una successione.
8. Il significato della seconda legge di Newton e la sua applicazione per lo studio di
semplici sistemi dinamici, come l’oscillatore armonico semplice.
9. La nozione di condizione iniziale per la soluzione di un problema dinamico.
10. La nozione di funzione reale in più variabili (mappa) da Rn −→ Rn per n = 2, 3.
11. La nozione di trasformazione lineare (nel piano ed eventualmente nello spazio) e
la sua rappresentazione in termini di matrici.
12. La costruzione della tangente ad un punto del grafico di una funzione in termini
della funzione derivata.
13. I numeri complessi e la formula di Eulero.
14. L’Utilizzo di software matematico (e.g. DERIVE) e fondamenti di programmazione.
12
15. L’Utilizzo di software per la presentazione e condivisione dei risultati del progetto.”
Tali conoscenze ed abilità riguardano, tra gli altri, aspetti nodali dello sviluppo
dei programmi nelle classi Quarte e Quinte Liceo Scientifico.
Pur prevedendo una maggiore adesione di studenti dalle Quarte (sia ad ordinamento tradizionale che P.N.I) e sperando nella partecipazione di alcuni ragazzi di
Quinta, il gruppo locale scriveva nella progettazione: “l’argomento scelto (i sistemi
dinamici) si presta molto bene ad essere trattato secondo differenti livelli di complessità. Si intende allora dividere gli studenti in gruppi di lavoro ed affidare loro, dopo
un’introduzione generale sull’importanza della nozione di mappa per lo studio di un sistema dinamico, diversi compiti/attività di approfondimento, sotto forma di problemi da
risolvere. La suddivisione dovrebbe rispecchiare la provenienza (classe quarta o quinta,
indirizzo tradizionale P.N.I.) e l’interesse dei ragazzi.”
Veniva anche fornita una possibile suddivisione in argomenti, che riportiamo
nella Tabella 1:
Classe
4a
Argomento
Studio dell’iterazione di mappe e di sistemi dinamici discreti
(dinamica delle popolazioni): il modello logistico.
a
4 P.N.I. Studio dell’iterazione di mappe nel piano (insiemi di Julia)
5a
Analisi del comportamento tipico di una funzione reale
di variabile reale col metodo grafico.
a
5 P.N.I. Analisi della relazione tra sistemi dinamici continui e
sistemi discreti. Studio dei bacini di attrazione.
Tabella 1: Ipotesi di suddivisione per classi delle attività per il laboratorio sui sistemi
dinamici.
La fase di preparazione prevista dalla progettazione prevedeva i seguenti momenti:
• stesura di una dispensa sui sistemi dinamici, di cui mi sono incaricato, da presentare agli studenti prima dell’inizio del laboratorio pomeridiano;
• analisi degli strumenti informatici da adottare per l’attività, esame e potenziamento delle risorse dell’Istituto;
13
• predisposizione di iniziative di comunicazione del progetto per favorire l’adesione volontaria degli studenti;
• incontri preparatori per la formazione del gruppo di lavoro.
2.2.1
La dispensa preparatoria
Dopo aver analizzato la letteratura sui contenuti scelti ed alcuni precedenti lavori ed
esperienze didattiche sullo studio dei sistemi dinamici, ho curato una dispensa nella
quale ho cercato di inquadrare l’argomento nel bagaglio di conoscenze e competenze
che i nostri studenti sviluppano nel corso curricolare di Matematica e di Fisica.
In particolare, ho introdotto il metodo delle fasi per lo studio di un sistema
dinamico, ricorrendo a concetti che fanno parte anche del programma di Fisica
(fluidodinamica) e rivisto fenomeni studiati fin dalla classe terza, come evoluzioni
di particolari sistemi dinamici.
Stimolato da una discussione avuta al primo incontro col prof. Cardin, sapendo
che l’attività del laboratorio si sarebbe concentrata sui sistemi dinamici discreti
(teoria delle popolazioni), ho cercato di porre in evidenza le relazioni con i sistemi
dinamici continui. Nella dispensa è stato allora presentato il metodo delle tangenti
di Newton per la ricerca degli zeri di una funzione come strumento per la costruzione
di un sistema dinamico. In questo modo, sono stati inquadrati, in una visione più
generale, contenuti tipici del programma di Matematica P.N.I., a beneficio anche di
studenti dell’indirizzo tradizionale o delle classi Quarte.
Essenziale per la stesura della dispensa è stata la collaborazione del gruppo locale,
con il quale ho discusso, corretto e migliorato il lavoro, che alla fine è consistito in
una quarantina di pagine. Ci sono stati incontri e scambi informali, culminati nella
riunione del 13 gennaio, nella quale la dispensa è stata esposta e revisionata. Preziosi
sono stati i suggerimenti dei colleghi, che avendo un’ottima conoscenza del livello
dei nostri studenti e prevedendo le loro domande e perplessità davanti allo scritto,
mi ha consentito di migliorare il materiale per sintesi e chiarezza.
2.2.2
Il ruolo del supporto informatico
La possibilità di fuire del supporto dell’Informatica, utilizzando programmi orientati
alla Matematica è assolutamente fondamentale per la realizzazione di un laboratorio
matematico.
Questa terminologia potrebbe apparire contradditoria da un punto di vista logico
e metodologico. La Matematica è una scienza principalmente deduttiva; che senso
ha allora accostarle il termine laboratorio, che è proprio del metodo sperimentale
14
galileiano e, in generale, delle scienze naturali, in cui gioca un ruolo chiave l’aspetto
fenomenologico-osservativo?
Facendo anche riferimento ai suggerimenti metodologici contenuti nei programmi di Matematica P.N.I., è un risultato ormai accettato e condiviso della ricerca
didattica sulla Matematica, il valore irrinunciabile rappresentato dall’insegnamento
per problemi.
Il termine viene inteso nella sua accezione più ampia, cioè come questioni che
non solo scaturiscono dallo studio dei fenomeni naturali o della vita quotidiana,
ma anche dagli stessi problemi che nascono facendo matematica. Per questi, è
fondamentale che gli studenti possano fare esperienze e lavorare per congetture ed
ipotesi: il sussidio informatico non solo libera dal fardello dei calcoli, ma consente
di effettuare verifiche, solo fino a pochi anni fa, impensabili.
Sulla questione riporto quanto scritto nel paragrafo A.13, pag. xxv, delle dispense preparatorie: “In effetti, lo studio delle mappe è interessante in sé, poiché le mappe
costituiscono un formidabile laboratorio per analizzare fenomeni caotici. Le mappe sono capaci di comportamenti molto più imprevedibili delle equazioni differenziali; negli
ultimi 25 anni si sono fatti straordinari passi avanti nel loro studio, grazie soprattutto
alla crescente disponibilità dei computer e della grafica computerizzata. Forse vi potrà
sorprendere il fatto che oggi, grazie all’attrezzatura informatica del nostro Istituto, saremmo in grado di ripercorrere con relativa facilità di calcolo alcune delle più affascinanti
scoperte sul caos ottenute da scienziati come May, Lorenz od Hénon.”
Per il nostro laboratorio, ci siamo subito resi conto che era necessario disporre
di uno strumento in grado di realizzare la ripetizione dell’azione di funzioni su spazi
numerici, per un numero molto grande di volte.
Durante la normale attività curricolare, gli studenti (del P.N.I e non solo), imparano ad utilizzare due principali software orientati alla Matematica: Cabri Géomètre e Derive. Il primo è la scelta più diffusa ed avanzata, a disposizione
nel mercato, per lo studio dinamico della geometria. Il secondo è un utile assistente, con interfaccia amichevole per l’utente, per fare matematica col calcolatore.
Nelle ultime versioni DERIVE, nato essenzialmente come tutti i C.A.S. (Computer Algebra System)3 per fare calcolo simbolico, implementa anche un linguaggio di
programmazione che parzialmente estende quello funzionale. Per queste ragioni è
il primo candidato che abbiamo preso in considerazione per svolgere l’iterazione di
mappe e funzioni.
Bisogna ammettere che l’utilizzo di questo o quel software è, in qualche misura,
frutto di preferenze personali, spesso dettate dall’abitudine. Nonostante il fatto che
i membri universitari del gruppo conoscessero bene Mathematica (il dott. Giacob3
Si tratta di programmi che consentono
al calcolatore di svolgere calcoli simbolici e maneggiare
√
in modo esatto espressioni come 2 o ln 5, ad esempio.
15
be era quest’anno titolare del corso di Matematica computazione per la laurea in
Matematica in cui si utilizza il software Mathematica), e che io stesso abbia utilizzato tale software dal 1991, ci siamo posti seriamente il problema su una possibile
alternativa. Ne è scaturito un documento, col quale abbiamo proposto l’acquisto di
alcune licenze di Mathematica per il nostro Istituto.
Nonostante tale documento potrebbe essere poco interessante per i non addetti ai lavori4 , ritengo tuttavia che tocchi una questione rilevante: la questione del
ruolo della programmazione nell’insegnamento curricolare della Matematica con lo
strumento informatico5 .
Lo riporto allora qui di seguito: “ I sistemi di computer algebra hanno rivoluzionato l’uso del calcolatore nella ricerca e stanno attualmente estendendo tale rivoluzione al curriculum
di studi universitario e pre-universitario. Nella nostra scuola è ormai da anni utilizzato proficuamente il software DERIVE nella versione 6 per l’insegnamento di Matematica curricolare e
P.N.I. Tale programma ha come vantaggio principale un’interfaccia utente molto amichevole,
che dovrebbe consentire ai ragazzi di utilizzare le funzionalità di tale assistente di matematica,
anche senza imparare comandi specifici del suo linguaggio. Tali comandi vengono introdotti
tramite l’interfaccia. Ciò nonostante, molto spesso il docente deve perdere tempo ad illustrare
agli studenti l’utilizzo di moltissimi pulsanti e comandi a tendina, che per di più tendono a
variare da una versione alla successiva (si pensi ad esempio alla dichiarazione della modalità
di utilizzo delle variabili tra la versione 5 e la versione 6). Effettivamente, però, il maggiore e
principale ostacolo di DERIVE (solo in parte superato nelle ultime uscite) è, a nostro avviso, la
limitatezza e rigidità del linguaggio di programmazione in esso implementato. Tale linguaggio
ha una struttura principalmente funzionale; sono stati recentemente introdotte istruzioni procedurali semplici (i cicli). Tuttavia, risulta evidente come per lo studente si tratti di utilizzare
un mezzo con due logiche assolutamente differenti e contrapposte: se da un lato (e per la
maggior parte del tempo) si pretende che il DERIVE scriva per noi le istruzioni, nel momento
in cui vogliamo automatizzare una procedura, siamo costretti a convincere lo studente che
deve imparare dei comandi, che per lo più risultano rigidi e, in qualche modo, nascosti. Tali
procedure risultano poi molto complicate o addirittura non implementabili quando si vuole automatizzare l’ambiente grafico, che in DERIVE è separato dall’ambiente di calcolo algebrico.
L’unica lodevole eccezione e il comando SLIDER BAR, che tuttavia risulta ancora poco stabile
e talvolta poco affidabile.
Per contrasto, il software MATHEMATICA della Wolfram Research si presenta come un
sistema completamente integrato in cui il calcolo interattivo (numerico e simbolico, presente
anche in DERIVE) si integra perfettamente con strumenti di visualizzazione avanzata e con un
ambiente completo di programmazione. Ciò che conta di più, è, inoltre, che tale ambiente di
4
Mi scuso con loro, e li invito a pazientare oppure a saltare la parte riprodotta in caratteri
piccoli.
5
Bisogna ricordare che i programmi del P.N.I., nonostante siano validissimi ancor oggi, furono stilati in un momento in cui il panorama della diffusione dell’informatica e dei PC era
completamente diverso da quello attuale; allora si era appena agli albori!
16
programmazione offre allo studente la possibilità di avvicinarsi alla programmazione utilizzando
indifferentemente i 3 principali paradigmi (funzionale, procedurale e ad oggetti) ad un livello
molto vicino all’utente. Certamente si debbono imparare dei comandi e delle istruzioni, ma
per svolgere quello che fa DERIVE, questi risultano molto semplici, e per di più rimangono
gli stessi nelle varie versioni, costituendo essi stessi a buon titolo un linguaggio. L’acquisto
di MATHEMATICA consentirebbe di risolvere il problema dell’integrazione tra Matematica
curricolare e programmazione (esigenza fortemente sentita dalla nostra utenza) e di offrire un
prodotto molto diffuso nel mondo accademico e tecnico, che lo studente ritroverà nei suoi
studi all’Università. Si segnalano inoltre le potenzialità di Mathematica anche per la computer
graphics e la possibilità di redigere documenti interattivi anche in formato HTML. Inoltre,
rispetto a DERIVE, che risulta sostanzialmente un valido prodotto di nicchia (principalmente
educational), il MATHEMATICA offre una sterminata bibliografia di testi, in cui viene esposto
il suo utilizzo nelle scienze fisico - matematiche ed in applicazioni ingegneristiche. Segnaliamo
tra tutti solo un titolo: COMPUTER SCIENCE with MATHEMATICA di Roman E. Maeder,
Cambridge University Press, (2000) ISBN: 0-521-66395-4.”
Tale richiesta fu appoggiata dai colleghi del Dipartimento di Matematica e Fisica
e sostenuta dal Dirigente Scolastico. Venne approvata dal Consiglio di Istituto e
soddisfatta in tempo per l’avvio del laboratorio.
2.2.3
La comunicazione per promuovere l’adesione degli studenti
Presupposto essenziale della realizzazione effettiva del Progetto era, naturalmente,
l’adesione degli studenti all’attività. Con lo scopo di acquisire visibilità all’interno
del vasto panorama di iniziative del Liceo, realizzammo il 16 febbraio 2006 un incontro di presentazione presso l’aula magna di via Aldo Moro, destinato ai circa 160
studenti delle classi Quarte e Quinte.
Divisi in due turni, nelle due ultime ore di lezione della mattina, i ragazzi hanno
assistito alla presentazione del P.L.S., da parte dei docenti universitari dottori Giacobbe e Bernardi. In quell’occasione, si sono fatti conoscere i giovani ricercatori che
avrebbero partecipato ai Laboratori pomeridiani, assieme al gruppo locale.
La raccolta delle adesioni è avvenuta in modo, per certi versi, sorprendente.
Hanno inizialmente risposto 26 studenti, tutti, tranne una ragazza, appartenenti
alle classi Quarte del nostro Liceo (5 di 4a A, 2 di 4a B, 6 di 4a C, 12 di 4a D, 1
di 5a C). La deludente risposta delle classi Quinte, forse, era dovuta al fatto che
i ragazzi dell’ultimo anno di corso erano, in gran parte, proiettati verso l’impegno
rappresentato dall’Esame di Stato. Ho verificato poi a posteriori, discutendo coi
colleghi del P.L.S. di altre scuole polo, che tale tendenza si era manifestata anche
nei loro Istituti.
Sul versante opposto, va sottolineato come, forse per effetto delle dinamiche di
17
gruppo, avevano aderito all’iniziativa anche studenti che avevano rendimenti medi
in matematica e che, forse per curiosità od emulazione, avevano deciso di partecipare. Dico fin da ora che alcuni si sono rivelati delle vere sorprese (in positivo,
naturalmente).
2.2.4
Gli incontri preparatori
Come previsto dal nostro piano di lavoro, abbiamo effettuato in orario pomeridiano
due incontri preparatori, di carattere prettamente organizzativo, che abbiamo svolto
alla sola presenza della componente locale, nei pomeriggi del 1 e del 6 marzo. Con
l’intento di favorire la partecipazione di tutti, e tenendo conto delle classi di appartenenza dei partecipanti, abbiamo riaggiustato i nostri programmi di lavoro. Tra
l’altro, negli incontri, abbiamo presentato le potenzialità del nuovo software (Mathematica) acquistato dall’Istituto e abbiamo avvertito i ragazzi che avrebbero potuto
lavorare con esso o con gli altri supporti informatici a disposizione della Scuola, in
particolare DERIVE e le calcolatrici grafico-simboliche TEXAS TI-89.
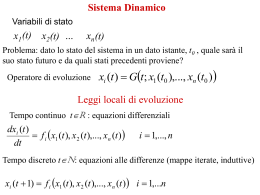
Nella fase preparatoria era stato elaborato un manifesto per l’iniziativa che serviva ad identificare le aule in cui si svolgevano le riunioni e che riportiamo nella
figura 1.
Soggetto del manifesto era la famosa (per i studiosi di sistemi dinamici) farfalla
di Lorenz6 , di cui parliamo nella dispensa nel paragrafo A.1, e che ho scelto pure
per la copertina di questo libretto.
Tutte le informazioni sugli incontri, cosı̀ come le dispense preparatorie, furono
inserite nel sito web di Istituto.
Sono stati approntati poi dei cartellini di riconoscimento, coi nomi e cognomi
dei partecipanti ai laboratori. Si trattava di piccoli segni, ma che avevano tutti
l’obiettivo di costruire l’appartenenza ad un gruppo, in questo caso di apprendisti
matematici.
2.3
L’attuazione dei laboratori
Spiego ora la metodologia e l’organizzazione dei laboratori, che si sono svolti nel
periodo 13 marzo - 12 aprile 2006, strutturati in cinque appuntamenti pomeridiani
di tre ore ciascuno.
Nel primo incontro, dopo una breve introduzione comune sull’oggetto dell’at6
Si tratta della rielaborazione di una figura da me ottenuta al calcolatore col software Mathematica 5.2 acquistato dal nostro Istituto. Ringrazio il collega prof. Tieghi, che cura il corso di
grafica nel nostro Istituto, per la realizzazione del manifesto.
18
Figura 1: Il manifesto del P.L.S. per la Matematica del Liceo “Galilei”.
tività, si sono formati due aule di lavoro per affrontare le tematiche proposte,
utilizzando i seguenti supporti ed ausilı̂:
A. 1): Il software simbolico Mathematica (docenti impegnati: Giacobbe, Bernardi,
Valente). Hanno aderito a tale gruppo i ragazzi che frequentavano i corsi con
sperimentazione P.N.I. e, in generale, i più interessati all’Informatica.
A. 2): Le calcolatrici Texas TI-89 (docenti impegnati: Nicoli e Napolitano). Hanno partecipato principalmente i ragazzi del Liceo scientifico ad ordinamento
tradizionale.
In entrambe le aule gli studenti sono stati divisi in gruppi di lavoro.
Nell’ultima mezz’ora, si è fatto un primo incontro comune per favorire un primo
scambio delle impressioni/esperienze da parte dei ragazzi.
Potendo sfruttare una maggiore immediatezza di utilizzo, il secondo gruppo (di
circa 10 persone) si è potuto concentrare da subito su alcuni risultati generali sui
sistemi dinamici lineari ed affini. Il primo gruppo, invece, ha familiarizzato col
nuovo programma di calcolo simbolico. Va sottolineato che gli studenti già conoscevano il software DERIVE e che si era insistito con loro nel fornire un metodo
di utilizzo in cui venivano evidenziate anche le istruzioni specifiche del linguaggio
(e.g.: SOLVE([eqn1,eqn2],[var1,var2], Real) direttamente da linea di comando oltre
che utilizzando l’aiuto dei menù a tendina) e i primi rudimenti di programmazione
funzionale.
19
Tale approccio è stato impiegato anche nel secondo incontro. Si è completato il
lavoro sulle popolazioni non interagenti con le stesse modalità della prima riunione,
in particolare nell’aula 1 è stato effettuato lo studio della dipendenza dai parametri
del modello logistico col software Mathematica. Nell’aula 2 si è effettuato lo studio di una successione tramite il diagramma a ragnatela, utilizzando la funzione
predisposta sulle calcolatrici Texas TI-89.
Dalla seconda parte della seconda riunione abbiamo lavorato tutti assieme: i
ragazzi delle due aule hanno iniziato a confrontare e discutere i risultati ottenuti.
Da quel momento, i ragazzi hanno accettato tutti di lavorare in un’unica aula,
con l’utilizzo del software Mathematica. Sono state eseguite le proposte di lavoro
sviluppate nei notebooks7 dai dott. Giacobbe e Bernardi. Spontaneamente, si sono
formati nuovi gruppi misti, con ragazzi che hanno lavorato nelle Aule 1 e 2 dei
precedenti incontri.
Le ragioni psicologiche dell’approccio seguito sono chiare: avevamo costruito
due gruppi, uno più sicuro sull’aspetto informatico, l’altro che non poteva soffrire
di complessi di inferiorità, disponendo prima degli altri di un certo bagaglio teorico, sviluppato in modo più rapido con le calcolatrici grafico-simboliche nell’attività
condotta dai proff. Napolitano e Nicoli.
L’obiettivo raggiunto è stato quello di stimolare lo scambio di esperienze e/o
competenze acquisite; l’analisi dei modelli proposti veniva condotto sfruttando le
nozioni generali apprese dagli uni e le competenze informatiche degli altri.
Solo nell’ultima parte del terzo incontro, il dott. Giacobbe ha guidato una discussione sui risultati ottenuti dai ragazzi. Io, invece, ho iniziato ad accennare alla
relazione tra sistemi dinamici discreti e sistemi continui, richiamando i contenuti
delle note preparatorie.
Gli ultimi due appuntamenti sono stati dedicati alle tematiche più interessanti,
che hanno portato a definire il comportamento caotico di un sistema dinamico.
I ragazzi sono stati in grado di lavorare autonomamente, all’interno dei loro
gruppi, per rispondere alle domande poste nei fogli di lavoro di Mathematica preparati dai dott. Giacobbe e Bernardi. A beneficio dei lettori ricapitolo gli argomenti
oggetto dei vari laboratori nella Tabella 2.
2.4
La fase finale: la verifica degli obiettivi raggiunti
Rispetto alle tematiche scientifiche che avevamo sperato di affrontare in fase di
progettazione, ci siamo resi conto di aver dovuto ridimensionare le nostre attese.
Ciò nonostante, tutti abbiamo avuto chiara la sensazione, specialmente negli ultimi
7
Fogli di lavoro di Mathematica.
20
Data incontro
13 marzo
20 marzo
31 marzo
3 aprile
12 aprile
Argomento
Studio di popolazioni isolate. Successioni definite per
ricorrenza: sistemi dinamici lineari ed affini.
Studio di popolazioni isolate:
modello di Verhlust (anche con variazioni stagionali).
successioni definite per ricorrenza con diagrammi
a ragnatela: il caso non lineare.
Studio di popolazioni interagenti: modello predatore–preda
con termine logistico sulle prede. Sistemi dinamici
non lineari in dimensione > 1.
Studio della mappa logistica.
Progettazione di un programma in Mathematica
per i diagrammi a ragnatela.
Comportamento caotico della mappa logistica.
Analisi del diagramma di biforcazione.
Tabella 2: Scansione dei contenuti dei laboratori del P.L.S..
incontri, che avevamo raggiunto l’obiettivo di formare un gruppo affiatato e coeso,
che affrontava con entusiasmo il lavoro. In particolare i ragazzi erano in grado di:
• studiare un problema autonomamente;
• confrontare varie strategie e strumenti informatici (pro e contro);
• formare congetture e porre spontaneamente domande volte ad una generalizzazione delle soluzioni ottenute;
• formarsi un’idea propria, anche se talvolta euristica, di nozioni anche complesse
(dinamica caotica).
A questo punto eravamo pronti per la sfida finale.
Abbiamo richiesto ai nostri studenti, lasciando un tempo congruo con gli impegni della parte finale dell’anno scolastico, di approfondire autonomamente i temi che
più li avevano interessati, magari scegliendo tra quelli proposti nelle dispense. Va
sottolineato che abbiamo suggerito loro di leggerle solo dopo aver completato l’attività sperimentale. Abbiamo inoltre incoraggiato i ragazzi a formare dei gruppi per
studiare gli argomenti scelti e stendere delle relazioni, che potevano anche riferirsi
direttamente all’attività svolta in laboratorio. Tale compito era richiesto al fine del
riconoscimento del laboratorio per l’attribuzione dei crediti formativi di Istituto.
21
L’appendice B è dedicata ad alcuni lavori fatti dai ragazzi; in positivo va notato
che alcuni di loro si sono impegnati ad approfondire temi, prendendo spunto dalla
letteratura citata nelle dispense. Con il sostegno del Dirigente Scolastico, il nostro
Istituto ha infatti acquistato alcune copie di volumi scientifici divulgativi, in particolare le opere [5, 8, 10, 11] che appaiono nella bibliografia della dispensa preparatoria
(App. A, pag. xxxvi).
Le dispense preparatorie presentate nell’appendice A, invece, sono state considerate una sorta di programma in vista di una verifica finale per l’attribuzione dei
crediti universitari. Il coordinatore scientifico di Padova, prof. Scimemi, mi aveva
infatti informato sulla possibilità, offerta agli aderenti al P.L.S., di fruire di crediti
Universitari spendibili nel caso di iscrizione al Corso di laurea in Matematica di
Padova. Mi aveva anche affidato l’incarico di preparare una prova finale sotto forma
di test a scelta multipla.
Per dare alcuni numeri: dei 26 studenti partecipanti ai laboratori, 17 hanno
deciso di affrontare la prova finale e l’hanno superata come illustrerò tra breve. La
quasi totalità, 22, ha risposto presentando (in maggioranza in gruppo) gli elaborati
per l’assegnazione dei crediti di Istituto.
2.4.1
Tipologia e contenuti della prova finale
La prova finale di accertamento per l’attribuzione dei crediti universitari è stata
effettuata il 22 maggio 2006. Ho costruito un test sfruttando le potenzialità di un
programma freeware, reperibile facilmente in internet8 , denominato QuizFaber.
I 17 ragazzi che hanno partecipato alla prova hanno risposto ai quesiti del test
direttamente da PC, nell’aula di Informatica del Liceo. Il sistema forniva le domande in modo casuale, per minimizzare le possibilità di comunicazione tra le varie
postazioni. Al termine della prova, il programma ha automaticamente valutato le
risposte corrette.
Il test a scelta multipla era composto delle seguenti 25 domande9 , per cui era
previsto un tempo massimo a disposizione di 59 minuti:
1. Un sistema dinamico è definito da:
R1: un vettore di stato ed una legge di evoluzione temporale per il vettore di stato
R2: un vettore che rappresenta le condizioni iniziali del sistema ed una successione
di trasformazioni di tale vettore
8
9
Programma prelevabile dal sito dell’autore: http://www.lucagalli.net.
Forniamo in grassetto l’etichetta della risposta corretta tra le quattro proposte R1, R2, R3 ed
R4.
22
R3: qualsiasi cosa che evolva nel tempo
R4: un insieme di vettori di stato del sistema
2. Supponete di prendere in prestito da un amico 100 Euro, al tasso di interesse annuo
del 4%, senza spese. Per poter diminuire il debito dovrete restituire una somma
annua superiore a
R1: 12 Euro
R2: 4 Euro
R3: 20 Euro
R4: 3 Euro
3. Il sistema dinamico ẋ = sin x
R1: è lineare, continuo, 1- dimensionale
R2: è non lineare, continuo, 1- dimensionale
R3: è lineare, discreto, 2- dimensionale
R4: è non lineare, continuo, 2- dimensionale
4. Il modello di Verlhust o logistico
R1: è un modello che descrive la crescita di una popolazione in un ambiente con
risorse illimitate
R2: è un modello che descrive la crescita di una popolazione in un ambiente con
risorse limitate
R3: è un modello lineare di crescita di una popolazione
R4: descrive una popolazione la cui crescita è illimitata
5. Il sistema dinamico continuo di equazione ẋ = 2x − 1
23
R1: ammette come unico punto di equilibrio x = 1/2
R2: ammette due punti di equilibrio, tra cui x = 1/2
R3: non ammette punti di equilibrio
R4: ammette come unico punto di equilibrio x = 1
½
x0 = 5
6. La formula
xn+1 = 5xn 2 − 3xn
R1: definisce un sistema dinamico continuo
R2: definisce un sistema dinamico discreto non lineare
R3: non definisce un sistema dinamico
R4: definisce un sistema dinamico discreto lineare
7. La famosa figura talvolta chiamata albero di fico
Figura 2: Figura dell’albero di fico inserita alla domanda 7 della prova finale per i crediti
universitari.
R1: rappresenta il diagramma di biforcazione della mappa logistica
R2: rappresenta la mappa logistica
R3: descrive il comportamento del modello di Malthus
24
R4: descrive un sistema dinamico continuo
8. Considera il seguente sistema dinamico discreto xn+1 = f (xn ) =
2xn
:
1 + 3xn
R1: Esso ammette come punti di equilibrio x = 0 e x = 1/2
R2: Esso ammette come punti di equilibrio x = 0 e x = 1/3
R3: Esso ammette come punti di equilibrio x = 1/3 e x = 1/2
R4: Non ammette punti di equilibrio poiché è singolare per x = −1/3
9. Il modello che descrive l’andamento di due popolazioni non isolate ed interagenti
(tipo lepri-volpi)
R1: è lineare continuo, 2-dimensionale
R2: è non lineare, 2-dimensionale
R3: è lineare, 2-dimensionale
R4: è non lineare 1-dimensionale
è il carattere della successione definita per ricorrenza nel modo seguente
10. Qual
½
x0 = 3
, n ∈ N:
xn+1 = −xn
R1: è irregolare (oscillante), di periodo 2
R2: è irregolare (oscillante) di periodo 3
R3: è asintoticamente stabile
R4: è asintoticamente instabile
11. Un sistema dinamico continuo 1 - dimensionale è definito da un’equazione di evoluzione del tipo ẋ = f (x),
R1: dove il primo membro rappresenta il ritmo di variazione della variabile di stato
x(t)
25
R2: dove il primo membro si riferisce all’accelerazione del sistema dinamico
R3: dove il primo membro indica la velocità del sistema dinamico
R4: dove il primo membro è lo stato iniziale del sistema
12. Fissato il vettore di stato iniziale, il ritratto di fase per un oscillatore armonico
smorzato è costituito da
R1: una ellisse nel piano (x, v)
R2: una spirale nel piano (x, v)
R3: non esiste
R4: una retta nel piano (x, v)
13. Un conto in banca può essere considerato un sistema dinamico assumendo come
vettore di stato
R1: il saldo e la capitalizzazione
R2: la capitalizzazione
R3: il tasso di interesse
R4: il saldo (vettore 1-dimensionale)
14. L’oscillatore armonico semplice è un sistema dinamico
R1: periodico, continuo, 1-dimensionale
R2: periodico, discreto, 2-dimensionale
R3: periodico, continuo, 2-dimensionale
R4: lineare discreto
15. Un punto di biforcazione o catastrofe per un sistema dinamico (dipendente da
parametri) corrisponde a
26
R1: una situazione in cui il sistema si distrugge
R2: un valore dei parametri in corrispondenza del quale vi è un cambiamento repentino del comportamento del sistema
R3: una situazione in cui il sistema si divide (biforca) in due parti distinte
R4: un punto di equilibrio stabile o instabile per il sistema
16. Il metodo delle tangenti di Newton
R1: permette di costruire un sistema dinamico discreto a partire da una funzione
continua
R2: serve a determinare gli asintoti di una funzione
R3: serve a trovare i punti di massimo o minimo di una funzione
R4: non ha alcuna relazione coi sistemi dinamici
17. Che relazione c’è tra la dinamica come parte della fisica e i sistemi dinamici?
R1: Nessuna
R2: I sistemi dinamici sono tipi particolari di sistemi fisici
R3: Lo studio del moto dei corpi definisce particolari sistemi dinamici
R4: Sono la stessa cosa
18. Il diagramma a ragnatela viene utilizzato per
R1: analizzare il comportamento asintotico di un sistema dinamico discreto
R2: analizzare il comportamento asintotico di un sistema dinamico continuo
R3: studiare solo i sistemi dinamici non lineari
R4: studiare solo i sistemi dinamici continui
27
19. L’orbita di un sistema dinamico discreto generata da un certo stato iniziale
R1: è l’insieme delle immagini ottenute dall’iterazione della mappa di evoluzione
R2: è definibile solo per sistemi dinamici di tipo astronomico
R3: ha periodo pari all’ordine del sistema dinamico
R4: è continua
20. Che differenza c’è tra un sistema dinamico discreto ed uno continuo?
R1: un sistema discreto è costituito da sottosistemi, un sistema continuo non può
essere suddiviso in parti distinte
R2: il vettore di stato di un sistema discreto è noto solo in istanti di tempo determinati, separati uno dall’altro
R3: in un sistema continuo il tempo scorre con continuità, in uno discreto procede
a passi successivi, in modo che l’evoluzione del vettore di stato è definita da
una successione
R4: un sistema continuo cambia lentamente, uno discreto varia a salti
21. Il modello di Malthus per la crescita di una popolazione è descritto dall’equazione
xn+1 = xn + kxn ,
R1: dove k > 0 se il tasso di mortalità annuo supera quello di natalità
R2: dove k < 0 se il tasso di mortalità annuo supera quello di natalità
R3: dove k dipende dalla popolazione iniziale
R4: dove k non può mai essere nullo
22. La seguente figura rappresenta il ritratto di fase per un sistema di due popolazioni
interagenti, che vivono in un ambiente con risorse limitate
R1: Tale andamento è analogo a quello di un oscillatore armonico lineare
28
Figura 3: Figura inserita alla domanda 22 della prova finale per i crediti universitari.
R2: Tale andamento è analogo a quello di un pendolo semplice
R3: Tale andamento è analogo a quello di un oscillatore smorzato
R4: Tale andamento è simile a quello del modello logistico
23. Gli zeri del campo vettoriale ẋ = sin x
R1: sono interpretabili come punti di equilibrio stabile del sistema dinamico
R2: sono interpretabili come punti di equilibrio instabile del sistema dinamico
R3: sono punti critici del sistema dinamico
R4: sono punti di equilibrio del sistema dinamico
24. Il ritratto di fase per un oscillatore armonico semplice è costituito da
R1: una famiglia di ellissi nel piano (x, v)
R2: una famiglia di parabole nel piano (x, v)
R3: una famiglia di iperboli nel piano (x, v)
R4: una famiglia di circonferenze nel piano (x, v)
25. Il sistema dinamico di equazione xn+1 = 2xn − 1
R1: ammette come unico punto di equilibrio x = 1/2
29
R2: ammette due punti di equilibrio, tra cui x = 1/2
R3: non ammette punti di equilibrio
R4: ammette come unico punto di equilibrio x = 1
Il risultato della prova, commentato a caldo al termine della stessa, è stato
giudicato sorprendente dai ragazzi. I partecipanti si sono meravigliati di essere stati
in grado di rispondere correttamente a buona parte dei quesiti utilizzando le idee
che avevano interiorizzato durante la loro pratica di laboratorio. Infatti, molti di
loro ammettevano di non aver avuto tempo di effettuare uno studio puntuale dei
contenuti della dispensa. Le risposte date alle singole domande sono presentate
nella Figura 4.
Figura 4: Riepilogo delle risposte fornite ai quesiti del test.
30
3
Ricadute del P.L.S. sull’attività curricolare
Concludo questo diario accennando alle positive ricadute del Progetto Lauree Scientifiche sulla mia attività didattica curricolare.
Il P.L.S., per la sua particolare valenza, mi ha invitato a riflettere su alcune
questioni, che ritengo fondamentali, relative all’insegnamento di Matematica e Fisica
(classe A049) nella Scuola Superiore.
La prima è contenuta in una domanda che ogni insegnante certamente si pone
nel suo lavoro: come posso interessare i ragazzi ai contenuti che propongo?
In effetti, però, sono convinto che questa domanda assuma una prospettiva ed
un’urgenza diversa se ciò che viene proposto ai ragazzi è su base volontaria.
Per un’attività integrativa come il P.L.S., ciò ha significato, come ho descritto,
l’individuazione di tematiche che fossero contemporaneamente accattivanti e con
valenza scientifica; ha determinato la comunicazione del valore della nostra proposta
per l’adesione degli studenti, ed un lavoro puntuale di programmazione per garantire
la continuità della partecipazione del gruppo.
Nelle riunioni fatte col Comitato scientifico a Padova, il coordinatore regionale
prof. Scimemi, ricordava spesso che il momento più delicato sarebbe stato il secondo
incontro di laboratorio. Era fondamentale non solo che gli studenti scegliessero di
venire al P.L.S., ma che pure ci ritornassero.
Devo affermare, con un pizzico di orgoglio, che abbiamo superato questa prova.
I docenti dell’Università, dottori Giacobbe e Bernardi, sono riusciti ad instaurare un
ottimo rapporto coi ragazzi. Hanno lavorato con gli studenti, avendo il coraggio di
uscire dalla tradizionale prospettiva della didattica universitaria, che come è noto,
avviene “ex cathedra”. Non solo: hanno comunicato la loro passione di giovani
ricercatori ai nostri ragazzi, che, incontro dopo incontro, hanno saputo sempre più
apprezzarli dal punto di vista scientifico ed umano.
Credo che, in questa situazione, siano contenuti tutti gli “ingredienti” per interessare i ragazzi: validità della proposta, fiducia dei ragazzi in chi la presenta
e capacità di comunicazione. Specialmente al triennio è infatti, secondo me, molto utile presentare il percorso didattico che si intende attuare e motivarlo, anche
nell’ottica dei futuri impegni universitari.
Per quanto attiene al modo di intendere l’insegnamento della Matematica, a mio
parere è fondamentale, specialmente a livello di Scuola superiore, non tralasciare
gli aspetti applicativi della disciplina, e i collegamenti disciplinari con le Scienze
fenomenologiche, in particolare con la Fisica.
Anche in questo il P.L.S. si è dimostrato molto utile: un conto, infatti, è presentare applicazioni come semplici corollari, magari in modo frettoloso, un altro è individuare ambiti applicativi vitali e collocarli nella loro giusta dimensione scientifica.
31
Fondamentale, per questo, è stato l’apporto al Progetto del mondo universitario, che
ha portato nelle nostre Scuole se non la ricerca, certamente lo spirito di ricercatori
appassionati del loro lavoro.
Il secondo problema, su cui il P.L.S. ha fornito alcune indicazioni, è la questione
dell’insegnamento dell’Informatica abbinata alla Matematica.
Se da un lato ritengo auspicabile che il legislatore preveda l’insegnamento dell’Informatica come disciplina a sé stante nei nuovi curricola anche liceali, certamente
bisogna ripensare come intendere l’utilizzo delle nuove tecnologie per l’insegnamento
di Matematica e Fisica.
Aggiungo alcune considerazioni generali sull’insegnamento dell’Informatica, fatte
da semplice fruitore, certamente non da culture, della materia.
Realizzare l’insegnamento dell’Informatica nella Scuola superiore è, a mio avviso, complicato. Si tratta di una disciplina in rapidissima evoluzione, per cui gli
stessi paradigmi di programmazione sono mutati in modo radicale negli ultimi anni.
Basta pensare che, ad esempio, quando furono stilati i programmi del P.N.I. i PC
funzionavano con un sistema operativo10 chiamato DOS; al giorno d’oggi, invece, la
piattaforma MicroSoft si è allineata da qualche anno all’interfaccia amichevole del
mondo Macintosh, per cui i nuovi PC utilizzano come sistema operativo Windows.
Per questo, il moderno paradigma di programmazione è ormai divenuta la programmazione ad oggetti. In questo contesto, insegnare i rudimenti della programmazione procedurale, magari il PASCAL, risulta obsoleto. Quello che è più grave, inoltre, è che il prodotto11 di un programma in Pascal è un file eseguibile, assolutamente
privo di quell’interfaccia grafica alla quale i ragazzi sono ormai abituati.
Pertanto hanno preso sempre più piede, nell’insegnamento della Matematica
P.N.I., i pacchetti applicativi, in particolare CABRI e DERIVE. Essi divengono
utilissimi mediatori nell’insegnamento della disciplina, avendo però un’interfaccia
utente moderna ed amichevole.
In questa situazione, che si potrebbe definire in continua evoluzione, si innesta
anche la rapida diffusione dei programmi Open source, e di un sistema operativo
alternativo, chiamato Linux. Dopo che Linux si è ampiamente diffuso in Italia in
ambiente accademico e delle ricerca, si inizia a discutere sul suo impiego nelle Scuole.
Ecco allora come il P.L.S. sia stato un utile banco di prova per studiare l’utilizzo
di nuovi ausilı̂ informatici per l’insegnamento della Matematica ai nostri ragazzi.
Abbiamo verificato come un programma leader, utilizzato nella ricerca in moltissimi
Dipartimenti di Matematica e di Fisica a livello internazionale, il Mathematica della
Wolfram Research, potesse essere insegnato anche a ragazzi della Scuola superiore
10
Per i non addetti ai lavori, potremmo scrivere, con relativo abuso di linguaggio, parlavano il
DOS.
11
L’output, direbbe un informatico.
32
con esperienza nell’uso di Derive. Come spiegato a pag. 16, tale programma potrebbe
essere un valido ausilio per l’introduzione dei rudimenti dei diversi paradigmi di
programmazione, procedurale, funzionale e ad oggetti.
Il terzo elemento di influenza del P.L.S. sull’attività didattica curricolare è stata
la scelta di alcuni contenuti, o il diverso taglio con cui proporli nelle classi.
Per citare i più importanti, lo studio delle successioni e l’analisi del loro comportamento asintotico diviene certamente più stimolante se si affrontano alcuni esempi,
presi dalla dinamica delle popolazioni o dall’economia. Ho visto che trattare il problema dell’ammortamento di un debito contratto o l’andamento di un conto corrente
con interessi e spese fisse risulta un buon tema di discussione per gli studenti, anche
per coloro normalmente poco motivati nei confronti della matematica. Alcuni ragazzi hanno addirittura approfondito la questione, discutendone anche coi genitori
che lavorano in banca.
D’altro canto, per Fisica, approfondire i collegamenti tra la dinamica dei fluidi
(anche secondo il punto di vista euleriano) e lo spazio delle fasi di un sistema dinamico, consente di rivedere ed inserire in un quadro concettuale coerente la dinamica di
sistemi, quali l’oscillatore armonico semplice ed il pendolo semplice. Questo approccio, normalmente non sviluppato nei testi, consente di trattare in modo adeguato
nella classe Quinta i fenomeni transitori in elettrodinamica, come carica e scarica di
un condensatore od extracorrenti di apertura e chiusura di un circuito.
Conclusioni
In questo diario ho tentato di tracciare un bilancio della nostra attività nell’ambito
del Progetto Lauree Scientifiche per la Matematica al Liceo “G. Galilei” di Adria.
Mi rendo conto che forse non è possibile raccontare tutte le sollecitazioni intellettuali, le emozioni, l’impegno e le soddisfazioni che sono scaturite da questa
esperienza.
Per questo ringrazio il gruppo di colleghi e gli universitari con cui ho avuto la
fortuna di collaborare, ma soprattutto i nostri giovani partecipanti, che sono stati
davvero i protagonisti dell’iniziativa.
Il mio auspicio è che molti di loro prendano in considerazione la possibilità, che
abbiamo voluto rappresentare con la farfalla di Lorenz, di spiccare il volo verso
gli studi scientifici e, in particolare, si avvicinino alla matematica, per studiarla o
semplicemente utilizzarla, per la loro professione.
33
Appendici
A
La dispensa preparatoria per i ragazzi
Introduzione ai sistemi dinamici
a cura del gruppo locale del Liceo “G. Galilei”
Sommario
In queste note presentiamo alcune idee sui sistemi dinamici che ti potranno risultare
utili per affrontare il laboratorio di matematica per il Progetto Lauree Scientifiche.
Lo scopo del progetto è convincerti che fare matematica non è solo un semplice esercizio intellettuale, destinato a poche persone; è molto di più. Al giorno d’oggi, tale
disciplina risulta essenziale per una comprensione profonda della realtà; ragionare in
linguaggio matematico consente di descrivere e studiare moltissimi fenomeni, dalla
fisica all’ingegneria, dalla biologia all’economia. La potenza della descrizione matematica della realtà diviene evidente ogni qual volta la teoria diviene predittiva. In
fisica fondamentale vi sono molti esempi di ciò, tra cui la scoperta dei bosoni vettori
W e Z che valse a Carlo Rubbia il premio Nobel per la Fisica. Più semplicemente, chi
tra noi non vorrebbe essere in grado di predire terremoti o inondazioni disastrose?
Abbiamo scelto di parlare di sistemi dinamici, di dinamica deterministica e caotica, poiché siamo convinti che sarà possibile ragionare insieme su questioni interessanti e delicate come queste, che riteniamo intellettualmente stimolanti. In particolare,
vorremmo esaminare se una descrizione matematica della realtà consenta comunque di conoscere in anticipo l’evoluzione temporale di un sistema, noto il suo stato
iniziale.
Al termine della nostra attività di laboratorio, speriamo vorrai rendere partecipi
della tua esperienza i tuoi compagni di classe.
i
A.1
Perché proprio i sistemi dinamici?
Al giorno d’oggi la dinamica è un argomento interdisciplinare, anche se essa era
originariamente una parte della fisica, e come tale tu l’hai studiata nel terzo e quarto
anno del Liceo Scientifico.
La dinamica si occupa di tutto ciò che è soggetto ad un cambiamento, tratta
sistemi che evolvono nel tempo. Per stabilire se il sistema in questione si dispone
all’equilibrio, ripete il proprio comportamento in cicli o fa qualcosa di più complicato,
è necessaria la dinamica.
Esistono due tipi di sistemi dinamici: quelli la cui evoluzione è descritta da una
variabile tempo continua, e quelli per cui il cambiamento avviene in tappe, divise
l’una dall’altra da intervalli di tempo finiti. I primi sono rappresentati da equazioni
differenziali (equazioni che hanno come incognite funzioni e/o derivate di funzioni),
i secondi vengono studiati attraverso l’azione ripetuta (detta iterazione) di mappe,
dette anche equazioni alle differenze.
In questo laboratorio ci occuperemo di questioni matematiche connesse allo
studio della dinamica.
In effetti, fu proprio un matematico, Poincaré, che per primo, con un approccio
geometrico, intuı̀ la possibilità dell’insorgere del caos, cioè il fatto che un sistema, in
particolari condizioni, dimostri un comportamento aperiodico dipendente in modo
sensibile dalle condizioni iniziali, e tale da rendere pertanto impossibile qualsiasi
previsione a lungo termine. L’idea di caos rimase in secondo piano per tutta la prima
metà del ‘900, fino a che, con l’avvento dei primi calcolatori, già dagli anni ‘50 fu
possibile fare esperienze con equazioni che prima di allora erano inaffrontabili. Negli
anni ’60 gli studi di Lorenz [1] sui moti convettivi nell’atmosfera portarono all’ormai
ben nota conoscenza sulla impossibilità di predire il tempo atmosferico al di là di
pochi giorni. Lorenz fu il primo a rendersi conto che se le soluzioni caotiche delle sue
equazioni venivano rappresentate in 3 dimensioni, esse si disponevano su un insieme
di punti a forma di farfalla12 ; il caos aveva quindi una sua struttura geometrica,
che oggi chiameremmo frattale. Anche persone poco appassionate di matematica
risultano attratte dalla infinita regolarità di schemi che appare nei frattali. In realtà,
caos e frattali sono una parte di un argomento più esteso noto oggi col nome di
dinamica. Gli anni del boom per lo studio del caos furono gli anni ‘70 dello scorso
secolo. Nacquero teorie sull’insorgere della turbolenza nei fluidi (Ruelle e Takens);
si scoprirono esempi di caos nelle mappe iterate che nascono nella dinamica delle
popolazioni in biologia [3] (May), poi un fisico (Feigenbaum) scoprı̀ che esistono certe
leggi universali che governano la transizione di un sistema da un comportamento
regolare ad uno caotico. Successivamente, Mandelbrot codificò e rese popolari i
12
È proprio la figura che abbiamo scelto per il manifesto del P.L.S. per il nostro Istituto.
ii
frattali; con essi produsse bellissimi esempi di grafica computerizzata [5] e dimostrò
come potessero venire impiegati in una grande varietà di situazioni.
I sistemi dinamici quindi rappresentano un terreno ideale nel quale anche noi
possiamo fare esperienze di matematica, aiutati anche dal calcolatore e da opportuni
softwares orientati alla matematica13 .
In questa dispensa desideriamo richiamarti alla memoria alcune conoscenze che
hai certamente acquisito nel corso dei tuoi studi. Cercheremo tuttavia di riordinarle; ti invitiamo a segnalarci eventuali imprecisioni o semplicemente aspetti che
vorresti ampliati o approfonditi. Dove possibile, cercheremo (anche col tuo aiuto)
di completarli coi riferimenti ai tuoi testi in adozione e di fornirti una bibliografia
essenziale.
A.2
Che cos’è un sistema dinamico?
Come possiamo definire un sistema dinamico? Un modo potrebbe essere quello di
affermare che un sistema dinamico è una funzione che ha un certo modo di comportarsi, una sua “condotta”14 . Potremmo anche affermare che un sistema dinamico
sa sempre quello che sta per fare. Direte che le definizioni date finora sono vaghe:
in effetti ciò è dovuto al fatto che, almeno in linea di principio, qualsiasi cosa evolva può essere pensata come un sistema dinamico. Cercheremo allora di illustrare
degli esempi che vi possono essere familiari, attirando la vostra attenzione sugli elementi fondamentali che costituiscono un sistema dinamico. Anticipiamo che sono
essenzialmente due:
a): Un vettore di stato che descrive completamente lo stato del sistema.
b): Una funzione, cioè una legge, che ci dica, dato lo stato del sistema in un certo
istante, quale sarà lo stato del sistema negli istanti di tempo successivi.
A.3
Sistema dinamici discreti: il conto in banca
Consideriamo il caso del vostro conto in banca. Se ci pensate, lo stato di questo
sistema dinamico è determinato da un solo numero, il valore del saldo, oggi espresso
in Euro. Diremo allora che il vettore di stato è 1-dimensionale, od anche, che è un
vettore ad una sola componente. Per conoscere lo stato del vostro conto in banca è
poi necessario conoscere la regola con cui tale stato cambia col tempo. Supponiamo
13
Proveremo in particolare ad utilizzare anche il software Mathematica 5.2; con esso uno di noi
(G.V.) ha ottenuto la famosa farfalla di Lorenz del nostro manifesto.
14
In lingua inglese diremmo una funzione con una certa “attitude”.
iii
che la capitalizzazione degli interessi del vostro conto avvenga a scadenza annuale15 .
È chiaro che per questo sistema il tempo deve essere considerato una variabile discreta, cioè una successione di istanti, separati l’uno dall’altro da un intervallo di un
anno. Noto l’interesse annuo del nostro conto, diciamolo r%, è facile scrivere come
la funzione di evoluzione agisce sullo stato. Indicando con xk ≡ x(k), k ∈ N, il saldo
all’istante k, abbiamo subito il saldo all’istante successivo:
³
r ´
xk .
(1)
xk+1 = 1 +
100
Quindi, per completare la descrizione del sistema, oltre all’equazione (1), serve la
condizione iniziale del conto, quella relativa all’istante t = 0, che indicheremo con:
x0 = D ,
(2)
dove avrete capito che D è il vostro deposito iniziale.
In questo semplice esempio è facile calcolare l’ammontare del saldo alla fine
dell’n-esimo anno. Sarà sufficiente iterare (cioè ripetere) l’azione della funzione di
evoluzione (1) a partire dallo stato inziale (2); si ottiene:
³
r ´
x1 = 1 +
D;
100
³
³
r ´
r ´2
x2 = 1 +
x1 = 1 +
D;
100
100
³
³
r ´
r ´3
x3 = 1 +
x2 = 1 +
D;
100
100
...
.³. .
r ´n
xn = 1 +
D;
(3)
100
Avrete riconosciuto che in questo modo i saldi xi sono una successione definita per
ricorrenza16 , e che l’ultima espressione ottenuta fornisce la soluzione dell’equazione
di evoluzione del nostro conto in banca.
Esercizio 1: Ricavate la soluzione per il saldo del vostro conto in banca, supponendo, oltre alle ipotesi appena introdotte (interesse annuo percentuale pari ad r,
capitale iniziale pari a D) che ogni anno siate in grado di depositare una somma
pari a b euro, frutto dei vostri risparmi.
Esercizio 2: Discutete una situazione simile al caso precedente, nella quale il vostro
conto in banca parte in rosso. Basterà porre D < 0 per studiare un piano di
ammortamento del vostro debito.
15
Nel nostro esempio, per semplicità non teniamo conto delle spese, del bancomat, delle carte di
credito, delle imposte ecc.
16
Vedi il paragrafo A.13.2 oppure il tuo libro di testo L. Lamberti, L. Mareu, A. Nanni, Corso
di Matematica vol. 1A, parag. 2.12, pag. 52.
iv
A.4
Sistema dinamici continui: esempi dalla fisica
I conti in banca sono esempi tipici di sistemi dinamici in cui il tempo procede a passi,
in modo discreto. Tuttavia, molti sistemi dinamici sono descritti meglio supponendo
che il tempo trascorra in modo continuo. È il caso dei sistemi della fisica classica, tra
cui, una palla lanciata verticalmente verso l’alto e l’oscillatore armonico semplice.
A.4.1
Una palla lanciata verticalmente verso l’alto
Il suo stato ad un certo istante è in questo caso descritto da una coppia di numeri
reali, che costituiscono un vettore 2-dimensionale. Si tratta dell’altezza h (ad esempio) dal suolo e della componente della velocità in direzione verticale v della palla,
che assumiamo come positiva se essa sta allontanandosi da terra.
Supponendo che voi conosciate da quale altezza h(0) lanciate la palla e con
quale velocità iniziale v(0), ora è evidente che non ha senso chiedersi cosa avviene
all’istante successivo v(1), poiché la variabile tempo qui scorre in modo continuo.
La fisica allora ci viene in aiuto, definendo i concetti di velocità istantanea v(t) = v
e accelerazione istantanea a(t) = a.
Grazie ad essi, possiamo scrivere17 v = ḣ e a = v̇, da cui la legge che regola il
sistema dinamico è:
½
½
h(0) = h0
ḣ = v
,
(4)
v(0) = v0
v̇ = −g
dove g = 9, 8 ms−2 è il ben noto valore per l’accelerazione di gravità. Sempre dalla
Fisica, conosciamo la soluzione dell’equazione di evoluzione, data da:
(
1
h(t) = h0 + v0 t − gt2 ,
(5)
2
v(t) = v0 − gt .
Esercizio 3: Rappresentate nel piano cartesiano il luogo di punti descritto dalle
equazioni parametriche (5) considerando x1 = h per l’asse delle ascisse e x2 = v per
l’asse delle ordinate. Di che curva si tratta?
17
Per una spiegazione matematica si veda il tuo libro di testo L. Lamberti, L. Mareu, A. Nanni,
Corso di Matematica vol. 3A.
v
A.4.2
L’oscillatore armonico semplice
Vogliamo ora ricordare uno dei sistemi dinamici più importanti per la fisica18 : si
tratta dell’oscillatore armonico semplice. Consideriamo una massa m, appoggiata
su un piano orizzontale, privo di attrito, ed attaccata ad una parete da una molla
ideale, di costante elastica k. Supponiamo che quando la coordinata orizzontale x è
nulla, la molla risulti a riposo.
Figura 5: L’oscillatore armonico semplice.
Se il blocco viene spostato verso destra rispetto alla sua posizione di equilibrio
(x > 0), la molla risultando allungata, lo richiama verso sinistra. Viceversa, se il
blocco è posto a sinistra della sua posizione di equilibrio (x < 0), allora la molla è
compressa e spinge il blocco verso destra. In entrambi i casi possiamo scrivere la
componente lungo l’asse x della forza dovuta alla molla: Fx = −kx. Dalla seconda
legge della dinamica, possiamo ricavare la componente dell’accelerazione lungo x:
k
ax = − x. Indicando con v̇ = ax il ritmo di variazione della velocità e con ẋ = v
m
la velocità, otteniamo l’analogo delle equazioni di evoluzione ottenute per la palla
k
nel parag. A.4.1; posto ω 2 = − si ha, infatti:
m
½
½
ẋ = v
x(0) = x0
,
(6)
v̇ = −ω 2 x
v(0) = v0
Anche in questo caso sono note le soluzioni di queste equazioni19 :
(
v0
x(t) = x0 cos ωt + sin ωt ,
ω
v(t) = v0 cos ωt − x0 ω sin ωt .
18
(7)
Dal corso di fisica avrete visto come gli stessi atomi possono, in molti casi, essere schematizzati
come degli oscillatori armonici lineari. Va anche ricordato che l’oscillatore armonico è uno dei
pochi sistemi la cui descrizione quantistica ammette una soluzione analitica esatta, che non fa uso
di metodi perturbativi.
19
I ragazzi del Quinto anno potranno facilmente verificarne la correttezza.
vi
A.5
Altri esempi dalla fisica: sistemi dinamici continui lineari e non lineari
Considerate una particella di massa m, connessa da una molla ideale di lunghezza
trascurabile e costante elastica k all’origine di un sistema di riferimento, e in moto
lungo l’asse x soggetta ad una forza di attrito viscoso linearmente proporzionale alla
sua velocità. È facile rendersi conto che la seconda legge della dinamica F~ = m~a,
una volta proiettata lungo l’asse x diventa: −γvx − kx = max . Se indichiamo con
ẋ e ẍ rispettivamente le componenti della velocità istantanea vx e dell’accelerazione
istantanea ax , otteniamo:
mẍ + γ ẋ + kx = 0 ;
(8)
tale equazione si dice differenziale ordinaria del secondo ordine, poiché contiene come
dx
d2 x
incognite la funzione x(t) e le sue derivate ẋ(t) =
e ẍ(t) = 2 , tutte dipendenti
dt
dt
dal tempo t, pensato come variabile continua.
Pensate ora ad un pendolo semplice; si tratta di una particella di massa m,
connessa da un filo inestensibile di massa trascurabile e lungo L ad un punto O, ed
in grado di muoversi in un piano verticale, soggetta alla forza peso P~ = m~g ed alla
tensione T~ della fune. Proiettando la seconda legge della dinamica lungo un versore
tangente τ̂ alla traiettoria della particella stessa, indicato con x l’angolo che il filo
forma con la verticale, si ottiene l’equazione: −mg sin x = maτ . Ricordando che
aτ = Lẍ si ricava l’equazione:
g
ẍ + sin x = 0 .
(9)
L
Qual è la differenza tra le equazioni (8) e (9)? Per coglierla è utile rappresentarle
geometricamente grazie ad un semplice espediente: introduciamo due nuove funzioni
x1 = x(t) e x2 = ẋ(t); ricordando20 che ẋ2 = ẍ(t), otteniamo la seguente forma
equivalente per l’oscillatore armonico smorzato:
(
ẋ1 = x2
,
(10)
k
γ
ẋ2 = − x2 − x1
m
m
per il pendolo semplice invece si ha:
(
ẋ1 = x2
g
.
ẋ2 = − sin x1
L
20
(11)
Costruendo il grafico Gv della velocità in funzione del tempo, è facile rendersi conto che l’accelerazione è costruita, o meglio, derivata da tale grafico. Infatti, l’accelerazione ad un certo istante
t coincide con la pendenza della retta tangente a Gv nel punto di coordinate (t, v(t)).
vii
Il sistema (10) è detto lineare, poiché tutte le equazioni di destra appaiono alla
potenza 1, mentre il sistema (11) è detto nonlineare. Normalmente, il pendolo
semplice viene affrontato al Liceo introducendo l’approssimazione di piccolo angolo
sin x
x. Dal limite fondamentale21 limx→0
= 1 si deduce che, per piccoli angoli x
x
(espressi in radianti) è lecito sostituire sin x con x ed ottenere l’equazione del pendolo
linearizzata. Il difetto di tale trattazione è che descrive le piccole oscillazioni del
pendolo attorno alla posizione di equilibrio. Non è tuttavia in grado di fornire una
trattazione di moti nei quali la massa m raggiunga la sommità della sua traiettoria.
In realtà il pendolo semplice può essere risolto analiticamente in modo esatto (lo
vedrete all’Università). Tuttavia deve esserci una via più semplice ... dopo tutto è
facile descrivere il moto di un pendolo: a bassa energia si hanno oscillazioni avanti
ed indietro, mentre ad alta energia possono esserci volteggi per il punto più alto.
A.5.1
Il diagramma nello spazio delle fasi
L’idea base è abbastanza semplice: supponiamo di conoscere una soluzione del sistema pendolo per una particolare condizione iniziale22 . Tale soluzione sarebbe
costituita da una coppia di funzioni x1 (t) e x2 (t) che rappresentano la posizione e
la velocità del pendolo ad ogni istante successivo. Se rappresentiamo in uno spazio
astratto, detto Spazio delle fasi tali coppie (x1 , x2 ) di valori dipendenti dal parametro tempo t, otterremo una particolare traiettoria nello spazio delle fasi. È facile
anche rendersi conto che tale spazio è completamente riempito di traiettorie, poiché
ciascun punto può rappresentare una condizione iniziale e quindi l’inizio di un moto
possibile.
In realtà l’importanza dell’utilizzo dello spazio delle fasi è che vedremo come,
dato il sistema, sia possibile disegnare le traiettorie e da queste trarre informazioni
sulla natura della soluzione dell’evoluzione.
A.5.2
Dimensione e linearità; dipendenza esplicita dal tempo.
Osserviamo infine che gli esempi (10) e (11), il primo lineare e il secondo non lineare,
sono entrambi 2-dimensionali, in quanto lo spazio delle fasi è descritto da coppie di
21
I ragazzi di Quinta avranno certamente già parlato della questione. I ragazzi di Quarta probabilmente avranno riflettuto sul fatto che, in una circonferenza di raggio unitario, se un angolo al
centro x viene misurato in radianti, allora esso fornisce anche la lunghezza dell’arco corrispondente.
Tale valore si confonde con la misura della corda intercettata da x se l’angolo al centro è molto
piccolo.
22
Per condizione iniziale intendiamo lo stato iniziale rappresentato dal vettore 2-dimensionale
(x1 (0), x2 (0)).
viii
numeri reali (posizione e velocità della particella). Un ultimo esempio particolarmente istruttivo è quella dell’oscillatore armonico forzato; si tratta di una situazione
simile a (8), in cui è presente una forza che, dall’esterno, stimola il sistema; nel caso
periodico si ha:
mẍ + γ ẋ + kx = F cos Ωt .
(12)
Anche in questo caso si può ottenere una descrizione nello spazio delle fasi, al prezzo
dell’introduzione di una nuova funzione x3 = Ωt. Il corrispondente sistema (detto
non autonomo) diventa:
ẋ1 = x2
γ
k
F
(13)
ẋ2 = − x2 − x1 + x3 ,
m
m
m
ẋ3 = Ω
In questo modo la traiettoria nello spazio delle fasi (questa volta 3–dimensionale),
risulterebbe non dipendere dal tempo. Ora le condizioni iniziali sono tre numeri x,
ẋ e t, necessari a predire il futuro dal presente.
Ma a cosa è dovuto il vantaggio dei sistemi lineari su quelli non lineari? I sistemi
lineari possono essere divisi in parti; ciascuna parte può essere risolta separatamente
e le soluzioni possono essere combinate per avere la risposta finale. Tuttavia, quando
parti di un sistema interferiscono o cooperano o competono23 , nascono interazioni
non lineari. In Fisica la non linearità è vitale nel funzionamento di un laser, nella
formazione della turbolenza in un fluido, o nelle superconduttività in una giunzione
Josephson.
Durante il Liceo tu hai studiato o studierai, per la maggior parte, sistemi lineari. In ottica ondulatoria ed in elettromagnetismo hai più volte sentito parlare di
principio di sovrapposizione degli effetti. Il fondamento matematico di tale principio
risiede nella linearità dei sistemi dinamici che descrivono i fenomeni elettromagnetici.
Vedremo che sistemi lineari in n = 1 dimensioni manifestano crescita o decadimento
o equilibrio. Sono necessari sistemi lineari in almeno n = 2 dimensioni per avere
oscillazioni, come vedremo nel parag. A.11.
Anticipiamo anche che, nel caso discreto di mappe iterate, vedremo pure casi
non lineari, che evidenzieranno fenomeni ancor più interessanti.
A.6
Sistemi dinamici continui 1-dimensionali
Consideriamo il sistema dinamico descritto dalla seguente equazione differenziale:
ẋ = f (x) ,
23
(14)
Ciò avviene anche in dinamica delle popolazioni, quando due specie, di tipo preda-predatore
vivono in uno stesso territorio; studieremo tale situazione nel nostro laboratorio.
ix
in cui x(t) è una funzione a valori reali del tempo t, e f (x) è una funzione liscia
(i.e. continua e derivabile quanto si vuole) a valori reali di x. Tale sistema dinamico
viene detto 1-dimensionale. Per evitare confusioni, si ricordi che per noi la parola
sistema verrà intesa sempre nel senso di sistema dinamico. Pensiamo inoltre che il
nostro sistema sia autonomo, cioè che la funzione f (x) non dipenda esplicitamente
dal tempo.
A.6.1
L’approccio geometrico: interpretazione di un’equazione differenziale come campo vettoriale
Cerchiamo ora di condurre per mano il lettore verso un’interpretazione geometrica
dell’equazione (14); all’inizio forse qualcuno avrà l’impressione si tratti di una costruzione artificiosa. In realtà, siamo convinti che se il nostro lettore avrà un po’
di pazienza, dopo poco si renderà conto dei vantaggi di tale costruzione. Questo
è uno di quei casi in cui un disegno è molto più utile di una formula per capire
come vanno le cose (nel nostro caso, quali siano le caratteristiche della soluzione del
nostro sistema). Illustriamo questo fatto con un semplice esempio: consideriamo
come funzione f (x) la funzione non lineare sin x. Studiamo cioè il sistema
ẋ = sin x .
(15)
In effetti il nostro esempio è motivato dal fatto che si tratta di uno dei pochi casi
non lineari che possono essere risolti direttamente; la soluzione x(t) che corrisponde
alla condizione iniziale x = x0 per t = 0 è abbastanza complicata:
¯
¯
¯ csc x0 + cot x0 ¯
¯;
t = ln ¯¯
(16)
csc x + cot x ¯
certamente, tale soluzione è di interpretazione non immediata. L’abbiamo scritta
non per far spaventare il nostro lettore, ma per cercare di convincerlo che forse vale
la pena che continui a leggere le nostre note e vedere che c’è una via più conveniente
(che si applica anche nei casi in cui non è affatto immediato o addirittura impossibile
ricavare l’analogo di (16)).
Pensiamo allora a t come al tempo, ad x come la posizione di una immaginaria
particella in moto lungo l’asse reale omonimo all’istante t, ad ẋ come la velocità
di tale particella al medesimo istante. In questo caso diremo che l’equazione (15)
fornisce un campo vettoriale sulla retta: esso determina infatti il vettore velocità ẋ in
ogni punto x. Per avere un’idea del campo vettoriale, possiamo allora fare il grafico
di ẋ in funzione di x, e tracciare delle frecce sull’asse delle x per rappresentare il
vettore velocità in ciascun punto x. Naturalmente, le frecce punteranno verso destra
quando ẋ > 0 e verso sinistra quando ẋ < 0.
x
Figura 6: Esempio di rappresentazione del sistema dinamico 1-dimensionale ẋ = sin x.
Lo stesso campo vettoriale può essere introdotto anche con un’analogia che ci
viene dalla fisica: pensate ad un fluido ideale in regime stazionario, che scorre lungo
l’asse x con una velocità che varia da punto a punto, secondo la legge (15). Nei punti
in cui la velocità si annulla, non c’è flusso; tali punti sono detti allora punti fissi per
il campo vettoriale24 . È facile rendersi conto che nel nostro caso si hanno due tipi di
punti fissi: i punti fissi stabili (detti anche attrattori o pozzi), e i punti fissi instabili
(detti anche repulsori o sorgenti); la differenza diviene manifesta guardando al verso
delle frecce nella figura 6.
Adesso che abbiamo a disposizione questa visione geometrica o fisica del sistema,
possiamo capire la natura delle soluzioni di (15). Basterà pensare alla posizione
iniziale x0 di una particella di fluido ed immaginare come essa sia trascinata dalla
corrente descritta dal nostro campo vettoriale. Se all’inizio la nostra particella ha
velocità positiva, cioè se si ha per t = 0 la condizione ẋ > 0, allora si sposta a
destra e per tempi lunghi (diremo asintoticamente) si avvicina al più vicino punto
fisso stabile. Allo stesso modo, se a t = 0 si ha ẋ < 0, la particella si avvicina al più
vicino punto fisso stabile alla sua sinistra. Se invece ẋ = 0, allora la particella resta
nella posizione x. La forma qualitativa delle soluzioni del sistema dinamico dato,
corrispondente a diverse condizioni iniziali è riassunta nella figura 7.
Tale ragionamento può naturalmente essere esteso a qualsiasi sistema del primo
ordine con campo delle velocità f (x). Il fluido immaginario è detto fluido di fase e
l’asse delle x, lo spazio delle fasi. Il flusso va verso destra se f (x) > 0, verso sinistra
se f (x) < 0. Per trovare la soluzione di (14) a partire dalla condizione iniziale x0 ,
basta porre una particella immaginaria (che diremo punto di fase) in x0 e guardare
come viene trasportata dalla corrente. Al passare del tempo, il punto fase si muove
lungo l’asse x secondo la funzione x(t), che diremo traiettoria con punto base x0 .
Una figura come la (7), che mostra tutte le traiettorie qualitativamente differenti
del sistema, verrà detta ritratto di fase. L’aspetto del ritratto di fase è controllato
dai punti fissi del campo vettoriale x∗ , definiti dalla condizione f (x∗ ) = 0. In termini della equazione differenziale di partenza, tali punti fissi rappresentano soluzioni
24
Vedremo, nel caso di sistema dinamico discreto, la definizione di punto fisso per un’equazione
di evoluzione nel parag. A.13.2.
xi
Figura 7: Ritratto di fase per il sistema dinamico nonlineare di Fig. 6.
x
2Π
3Π
2
Π
Π
2
4
2
t
Π
-
2
-Π
3Π
-
2
-2 Π
all’equilibrio, poiché se all’inizio la particella si trova in x = x∗ , allora resterà sempre
in tale posizione: x(t) = x∗ , ∀t > 0.
Un punto di equilibrio si dice stabile se perturbazioni sufficientemente piccole a
partire dallo stesso tendono a smorzarsi nel tempo. Viceversa, gli equilibri instabili sono tali per cui, col passare del tempo, tali perturbazioni divengono sempre
maggiori. Notiamo che la definizione appena data ha una natura locale, poiché si
riferisce a perturbazioni abbastanza piccole. Se le perturbazioni a partire da un
punto di equilibrio tendono comunque a smorzarsi, indipendentemente da quanto
grandi siano, allora il punto di equilibrio si dirà globalmente stabile.
A.7
Analisi della stabilità
Dobbiamo ammettere che l’analisi geometrica che abbiamo appena cercato di esporre
fornisce solo un buon quadro qualitativo dell’andamento di un sistema dinamico.
Non ci dice ad esempio, l’istante in cui la velocità è maggiore, oppure la scala di
tempo caratteristica in cui avviene un fenomeno di crescita o di calo, come quello
descritto nel ritratto di fase della Fig. 7.
xii
Tuttavia, con semplici ragionamenti che fanno uso delle derivate, è possibile
capire come vanno le cose25 .
Consideriamo un punto fisso x∗ per il campo vettoriale f (x), definito, come
abbiamo visto, dalla condizione f (x∗ ) = 0. Ci chiediamo se è possibile capire dall’andamento della Fig. 6 se tale punto fisso è stabile oppure instabile per il sistema.
Seguendo l’analogia idrodinamica che abbiamo spiegato, forse vi siete accorti che
nelle vicinanze di un pozzo (punto fisso stabile, pallino nero in figura) il grafico è
decrescente, mentre vicino ad una sorgente (punto fisso instabile, pallino bianco in
figura) il grafico è crescente. Da ciò segue subito che in tali punti fissi, la derivata
prima di f (x) è rispettivamente negativa o positiva26 .
Questa informazione può essere utilizzata per studiare il comportamento della
soluzione dell’equazione (14) nelle vicinanze27 di un suo punto fisso x∗ . Indichiamo
con z = x − x∗ una piccola perturbazione attorno a x∗ ; se deriviamo rispetto al
tempo otteniamo subito28
ż =
dz
d(x − x∗ )
=
= ẋ .
dt
dt
Allora l’equazione (14) può essere scritta come:
ż = ẋ = f (x) = f (x∗ + z) .
(17)
A questo punto facciamo un’approssimazione, che sarà tanto più buona quanto stiamo vicini al punto fisso x∗ o, equivalentemente, tanto più piccolo rimane z. Sostituiamo la nostra funzione f (x) con una nuova funzione g(x) che abbia la proprietà
di avere per grafico la retta tangente al grafico di f (x) nel punto P ∗ . Tale funzione
è proprio:
g(x) = f (x∗ ) + f 0 (x∗ )(x − x∗ ) .
(18)
Riesprimendo l’equazione sopra in termini della variabile z che rappresenta la perturbazione, otteniamo allora29 :
g̃(z) = f (x∗ ) + f 0 (x∗ )z = f 0 (x∗ )z ,
25
(19)
Per i ragazzi del Quarto anno: non spaventatevi! Siamo sicuri che anche voi sarete in grado
di capire le idee che vi stiamo proponendo.
26
Sempre per i ragazzi di Quarta: la derivata prima di una funzione reale di variabile reale f (x),
calcolata in un punto x del suo dominio, è la pendenza della retta tangente al grafico della funzione
nel punto P ≡ (x, f (x)). In un sistema monometrico, la pendenza è la tangente trigonometrica
dell’angolo formato tra tale retta tangente e il semiasse positivo delle x.
27
Per i ragazzi di Quinta: in un intorno di x∗ .
28
Infatti la derivata della funzione costante x∗ è nulla.
29
Per i pignoli: abbiamo chiamato la funzione della nuova variabile con un nome diverso, g̃.
xiii
dove l’ultima uguaglianza deriva dal fatto che x∗ è punto fisso per il sistema.
Finalmente, siamo in grado di riscrivere l’equazione (14) sostituendo f con g:
ż = f 0 (x∗ )z .
(20)
Abbiamo ottenuto un’equazione lineare; vedremo nel paragrafo successivo esempi di tali sistemi dinamici lineari, alcuni dei quali siamo sicuri avete studiato o
studierete qui al Liceo.
A.8
Sistemi dinamici lineari 1-dimensionali
Iniziamo dall’esempio che tutti i ragazzi del Quinto anno avranno già visto o studieranno tra breve: il processo di carica di un condensatore. Come sapete, un
condensatore è un sistema fisico in cui si realizza il fenomeno dell’induzione elettrostatica completa; serve ad immagazzinare una certa quantità di carica elettrica,
che indichiamo con Q. Quando il condensatore è carico, ai suoi capi si realizza una
differenza di potenziale, che indichiamo con V . La capacità C di un condensatore è
Q
data dal rapporto costante C = . Per caricare un condensatore, esso viene norV
malmente collegato in serie ad una resistenza e ad una batteria, in grado di fornire
un d.d.p. costante V0 . Il circuito è rappresentato in figura 8, assieme con il grafico
che descrive l’analisi geometrica del sistema dinamico. Notate che il processo di
carica avviene chiudendo l’interruttore.
Figura 8: Carica di un condensatore e grafico per lo studio del processo.
.
Q
R
C
V0
Q
Scrivendo l’equazione per l’unica maglia di cui è costituito il circuito otteniamo:
−V0 + RI +
Q
= 0.
C
(21)
Poiché durante la carica del condensatore, ad un certo istante t, la corrente che
fluisce nel circuito è uguale alla variazione istantanea della carica accumulata sulle
xiv
armature, vale la ben nota relazione
I(t) = lim
t→t
Q(t) − Q(t)
= Q̇(t) ,
t−t
(22)
è facile ottenere l’equazione che descrive la dinamica del sistema, in termini della
funzione Q(t):
V0
1
Q+
≡ f (Q) .
(23)
Q̇ = −
RC
R
In Fig. 8 si vede a destra il diagramma che rappresenta l’evoluzione temporale del
sistema. Vi invitiamo ora a verificare che il sistema ha un unico punto fisso stabile
Q∗ = CV0 . Se preferite esprimere il tutto in termini di perturbazioni rispetto a tale
punto fisso, ponendo z = Q − Q∗ ottenete l’equazione (l’analoga della (20)):
ż = −
z
τ
τ = RC ;
(24)
dove abbiamo introdotto quella che i fisici chiamano la costante di tempo τ del
circuito. La soluzione dell’equazione corrispondente alla condizione iniziale di carica
nulla (Q0 = 0) ci è nota dalla fisica30 :
t
−
(25)
Q(t) = Q0 1 − e τ ,
ed è rappresentata nella figura 9.
A questo punto invitiamo i lettori a ricercare, nel ritratto di fase del sistema
non lineare mostrato in figura 7, un andamento simile a quello della carica del
condensatore; sarà interessante confrontare la condizione iniziale di quel caso con
quella di condensatore scarico, in riferimento alla posizione del più vicino punto fisso
stabile per la funzione sin x.
A.8.1
La caduta di un grave nell’atmosfera
Ma è necessario scomodare l’elettrostatica per ritrovare un sistema dinamico lineare
del primo ordine? In effetti, già durante lo studio della meccanica i ragazzi del
Quarto anno avranno studiato il caso del moto di caduta di un grave soggetto anche
ad una forza di attrito viscoso, direttamente proporzionale alla velocità. In quel
30
I ragazzi di Quinta potranno facilmente verificare che si tratta della soluzione giusta. Va
comunque sottolineato che per comprendere il messaggio che vorremmo dare, questi sono solo
dettagli tecnici.
xv
Figura 9: Quantità di carica Q presente sulle armature di un condensatore in funzione del tempo
t durante il processo di carica.
Q
t
d~v
caso, dalla seconda legge della dinamica, F~ = m~a = m
proiettata lungo un asse
dt
x, diretto come la verticale discendente, si ottiene:
mg − γv = mv̇ ,
(26)
dove g = 9, 8 ms−2 è l’accelerazione di gravità e γ è una costante, dipendente dal
mezzo (aria) in cui si muove il corpo e dalla sua forma31 . L’equazione (26) può
facilmente essere posta nella forma:
v̇ = −
γ
v+g.
m
(27)
Lasciamo a voi il compito di trovare la soluzione; provate prima a pensare alla fisica
del problema. Esiste una velocità limite: quanto vale? Provate ora a fare la stessa
costruzione geometrica che abbiamo fatto per la carica del condensatore. Anche
qui trovate un diagramma lineare, con un punto fisso stabile. Sareste in grado di
indovinare qual è il ritratto di fase in questo caso?
A.8.2
La crescita di una popolazione
In effetti, non è neppure necessario studiare la fisica per trovare esempi di sistemi
dinamici lineari del primo ordine. Partiamo da lontano: vi siete mai chiesti perché
il numero e di Nepero è cosı̀ caro ai matematici? Provate a riprendere in mano il
vostro testo del quarto anno e cercate di vedere come è introdotto tale numero. I
31
Ovviamente lasciar cadere un pallone da rugby con l’asse verticale od orizzontale determina
coefficienti diversi. Quando vi aspettate sia maggiore?
xvi
ragazzi di quinta sapranno già la definizione più rigorosa di limite di una successione:
µ
¶n
1
e = lim 1 +
.
(28)
n−>∞
n
Tutto molto bello... ma come è possibile inventarsi una cosa tanto strana ... Non
diamo volutamente la risposta qui, perché vorremmo che foste voi a farvi un’idea
della questione. Tuttavia richiamiamo un problema molto famoso in biologia, che
studieremo anche nel nostro laboratorio. Si tratta del modello più semplice possibile
per la crescita di una popolazione di organismi32 , di cui vogliamo studiare il numero
N (che chiameremo popolazione come funzione del tempo t). Detto r il ritmo di
crescita, il sistema dinamico è descritto dall’equazione:
Ṅ (t) = rN (t) .
(29)
Ormai avrete capito che questo modello predice una crescita esponenziale. Dal punto
di vista della biologia, si tratta di un approccio assolutamente non soddisfacente,
ma vedremo nel corso del nostro laboratorio come si possono migliorare le cose.
A.9
Ricerca degli zeri di una funzione
In questo paragrafo, intendiamo costruire un sistema dinamico discreto a partire da
un problema che fa parte integrante del programma dei ragazzi delle Classi Quinte con sperimentazione P.N.I.. Si tratta della soluzione numerica approssimata di
un’equazione, col metodo delle tangenti di Newton. Partiamo, come sempre, da un
esempio: risolvere nel campo reale l’equazione
x − cos x = 0 .
(30)
In effetti, anche i ragazzi delle Quarte sono in grado di dare un’interpretazione grafica del problema. Tuttavia, per determinare le coordinate (in particolare l’ascissa)
dell’intersezione tra il grafico della prima bisettrice y = x e della funzione y = cos x,
il metodo grafico è decisamente insoddisfacente.
Poniamo allora la questione in modo generale. Intendiamo cercare gli zeri contenuti in un intervallo I = [a, b] ⊂ R di un’equazione del tipo:
g(x) = 0 ,
32
(31)
Diamo qui la versione a tempo continuo del problema; nelle dispense tratteremo la versione
discreta fra breve; tale versione risulterà altrettanto importante.
xvii
essendo g una funzione reale di variabile reale, che soddisfa all’ipotesi g 0 (x) 6= 0, per
tutti gli x ∈ I 33 .
Il metodo inizia cercando di indovinare una soluzione per lo zero della funzione34 :
sia x0 il nostro primo tentativo per fornire la soluzione dell’equazione (31). Nel caso
fossimo incredibilmente fortunati, potremmo trovare35 g(x0 ) = 0 e il nostro lavoro
sarebbe finito. In caso contrario, possiamo usare una ben precisa procedura per
trovare una soluzione “migliore”. Noto x0 , abbiamo calcolato g(x0 ) 6= 0. Costruiamo
la retta tangente al grafico della funzione g nel punto P0 di coordinate (x0 , g(x0 )).
Troviamo l’equazione:
y = g(x0 ) + g 0 (x0 ) (x − x0 ) ;
(32)
notate che il coefficiente angolare della tangente è uguale al valore della derivata
prima della funzione g, calcolata nel punto di tangenza. Sappiamo bene che, sfortunatamente, la curva si discosta dalla tangente (32), tuttavia possiamo trovare
l’intersezione di tale retta con l’asse delle x, di equazione y = 0. Ricaviamo allora il
valore
g(x0 )
.
(33)
x1 = x 0 − 0
g (x0 )
Se ora consideriamo questa una migliore scelta per la nostra soluzione, possiamo
ripetere la costruzione della retta tangente al grafico di g, questa volta nel punto P1
di coordinate (x1 , g(x1 )). La intersezione della nuova tangente con l’asse delle x è
ora:
g(x1 )
.
(34)
x2 = x 1 − 0
g (x1 )
Credo ora sia chiaro che in questo modo abbiamo costruito un sistema dinamico
discreto, con funzione di evoluzione X cosı̀ definita:
xn+1 = xn −
g(xn )
≡ xn + X(xn ) .
g 0 (xn )
(35)
Osserviamo inoltre che x∗ è uno zero per g se e solo se x∗ è un punto di equilibrio
per il sistema dinamico discreto36 che abbiamo costruito tramite il metodo delle
tangenti di Newton.
33
Sarà interessante studiare le condizioni a cui deve soddisfare g affinché la soluzione dell’equazione esista e sia unica. Con riferimento ad I, considerate per ora che sia g(a)g(b) < 0 e g 00 (x) 6= 0,
∀x ∈ I. Per le persone interessate, la questione viene approfondita nel volume 3B del Libro di
testo di Matematica.
34
In lingua inglese si dice un guess, una supposizione.
35
Ma ciò è decisamente improbabile!
36
Per la definizione di punto di equilibrio per un sistema discreto, si veda il parag. A.13.2.
xviii
A.10
Come ottenere un sistema dinamico discreto da uno
continuo e viceversa
Ritorniamo ora al sistema dinamico continuo 1-dimensionale, descritto dall’equazione di evoluzione (14), e supponiamo che sia noto lo stato iniziale x(t0 ) = x0 . Se
decidiamo di calcolare le sue soluzioni in modo approssimato, possiamo sostituire
alla variabile continua indipendente t ∈ R una variabile discreta n ∈ Z. Fissiamo ora
un incremento finito, abbastanza piccolo h = ∆t della variabile tempo. Possiamo
allora definire per ricorsione la successione
xn+1 − xn
= f (xn ) ,
h
x 0 = x0 .
(36)
Ricordiamo ora che si può pensare che l’equazione (14) si riferisca al moto stazionario di un fluido lungo l’asse x, con velocità pari a f (x) nel punto x del condotto.
Immaginiamo ora di viaggiare assieme ad un punto dello spazio delle fasi, trasportati
dalla corrente. Se inizialmente ci troviamo in x0 , e la velocità locale è f (x0 ), se ci
muoviamo per un breve intervallo di tempo h = ∆t, ci sposteremo approssimativamente di una distanza f (x0 )∆t. Naturalmente stiamo facendo un’approssimazione,
perché è ragionevole che, seppur di poco, la velocità cambi durante lo spostamento.
Tuttavia, per h piccoli, la nostra approssimazione è buona, per cui avremo per la
nuova posizione raggiunta:
x(t0 + h) ≈ x1 = x0 + f (x0 )h .
(37)
A questo punto basta ripetere il ragionamento. L’approssimazione ci ha condotto ad
una nuova posizione x1 ; la nostra nuova velocità è qui f (x1 ); un nuovo spostamento
in avanti, per un tempo nuovamente uguale ad h ci farà avanzare a x2 = x1 +f (x1 )h,
e cosı̀ via. Abbiamo cosı̀ esposto il più semplice schema di integrazione numerica
dell’equazione differenziale (14). Esso è noto anche col nome di metodo di Eulero.
Visualizziamo il metodo di Eulero rappresentando in grafico x verso t.
Nella figura 10, la curva mostra la soluzione esatta x(t), i pallini bianchi i valori x(tn ) = xn , calcolati ai tempi discreti tn = t0 + nh, mentre i pallini neri sono
i valori approssimati ottenuti dal metodo di Eulero. Come si vede, in poco tempo l’approssimazione peggiora, a meno che h sia molto piccolo. In effetti, esistono
diverse versioni migliorate del metodo di Eulero; ciò nonostante, il caso semplice
che abbiamo esposto contiene già le idee essenziali dell’approssimazione numerica.
Le formule normalmente utilizzate sono tuttavia più complicate. A titolo di esempio, riportiamo solo la successione ottenuta col metodo di Runge–Kutta; dopo aver
xix
Figura 10: Metodo di Eulero: soluzione esatta ed approssimata a confronto.
definito le seguenti quantità:
k1 = f (xn )h ,
µ
k 2 = f xn +
µ
k 3 = f xn +
µ
k 4 = f xn +
¶
1
k1 h ,
2
¶
1
k2 h ,
2
¶
1
k3 h ,
2
un buon valore (anche per h = ∆t non troppo piccoli) di xn+1 è dato da:
xn+1 = xn +
1
(k1 + 2k2 + 2k3 + k4 ) .
6
(38)
Concludiamo il paragrafo, riconsiderando la discretizzazione (36) dell’equazione
(14). Sia Ψ un qualche cambiamento (sufficientemente regolare) della variabile tempo t, cioè s = Ψ(t). Il cambio di variabile trasforma la (14) in un’equazione del tipo
ẋ = ζf (x), con ζ > 0. Se siamo solo interessati ai valori della x che determinano
la successione (36), non è restrittivo allora porre, fin dall’inizio, h = 1. A questo
punto, se data la funzione reale di variabile reale37 g(x) dalla quale abbiamo scritto
37
Tali risultati si estendono al caso di funzioni g : Rm → Rm , o a campi vettoriali f in n > 1
dimensioni, ma qui non li tratteremo.
xx
la successione di Newton (35), ci poniamo il problema di trovare il campo f (x) di
cui la successione è la riduzione discreta, è sufficiente scegliere:
fNEW (x) = −
g(x)
.
g 0 (x)
(39)
Da ciò si vede che x∗ è uno zero per g se e solo se x∗ è un punto di equilibrio per
il campo vettoriale fNEW .
A.10.1
Un esempio di soluzione numerica
Un esempio di sistema dinamico continuo 1-dimensionale che esamineremo nella sua
variante discreta (la mappa logistica) è dato dall’equazione non lineare:
ẋ = x(1 − x) .
(40)
Per determinare numericamente la soluzione, possiamo rappresentare il campo delle
pendenze del sistema nel piano (t, x).
Figura 11: Campo delle pendenze per il modello logistico continuo (a sinistra) e soluzione ottenuta
col metodo di Runge-Kutta con passo h = ∆t = 0.1, per diverse condizioni iniziali (a destra).
x
2
1.5
1
0.5
x
2
1.5
1
0.5
2
4
6
8 10 t
2
4
6
8 10 t
In figura 11, a sinistra, si vede un modo nuovo di interpretare l’equazione (40):
dx
della soluzione del moto
per ogni punto (t, x), l’equazione fornisce la pendenza
dt
che passa per quel punto; tali pendenze sono rappresentate da piccoli segmenti. La
determinazione della soluzione si riduce allora al problema di disegnare la curva che
è localmente sempre tangente al campo delle pendenze. Nella figura 11 si vedono
alcune possibili soluzioni che partono da diverse condizioni iniziali nel piano (t, x).
xxi
A.11
Il metodo delle fasi per l’oscillatore armonico lineare
A.11.1
Il ritratto di fase
Ritorniamo all’esempio da noi introdotto nel paragrafo A.4.2. In quel caso, è nota
la forma analitica delle soluzioni; pertanto il problema di determinare il ritratto di
fase del sistema, si riduce a rappresentare la curva parametrica descritta dalle (7)
nel piano (x, v). Lasciamo a voi come esercizio di ricavare l’equazione cartesiana per
la curva; si trova:
ω 2 x2 + v 2 = ω 2 x0 2 + v 0 2 ,
(41)
che riconoscerete essere un’ellisse, rappresentata in figura 12, per v0 = 0 e x0 < 0.
Figura 12: Ritratto di fase per l’oscillatore armonico semplice.
v
HbL
HaL
HcL
x
HdL
Dalle figure 13 e 12 è facile convincersi che quando x ha valore minimo (negativo)
x0 , corrispondente alla situazione iniziale di massima compressione della molla, la
velocità è nulla. Nell’istante successivo, mentre il punto di fase viaggia lungo l’orbita,
la massa m è portata in punti dove x aumenta e la velocità v è ora positiva: la massa è
spinta verso la sua posizione di equilibrio. Ma quando la la massa raggiunge x = 0,
essa ha la massima velocità positiva (posizione b in figura), per cui la oltrepassa
(x > 0). La massa ora rallenta e si arresta nell’istante in cui raggiunge l’altra
estremità dell’oscillazione, dove x è massima e v = 0. A questo punto la massa è
tirata nuovamente verso sinistra e completa il ciclo. Lasciamo a voi ora di rispondere
alle seguenti domande:
Esercizio 4: Supponete che il vostro oscillatore armonico ad un certo punto inizi
a dissipare energia, si comporti cioè come un sistema reale. Cosa vi aspettate per il
suo ritratto di fase?
Esercizio 5: Forti della interpretazione fisica data nell’esercizio precedente, dimostrate che la condizione ω 2 x2 + v 2 = ω 2 x0 2 + v0 2 = costante è equivalente alla
conservazione dell’energia meccanica.
xxii
Figura 13: Fasi del moto dell’oscillatore armonico semplice.
A.11.2
L’approccio geometrico per sistemi in 2 dimensioni
A questo punto qualche lettore forse si chiederà se è possibile utilizzare l’approccio
geometrico introdotto nel paragrafo A.6.1 per sistemi dinamici 2-dimensionali, come
l’oscillatore armonico. Ciò risulta fondamentale per studiare i sistemi dinamici 2dimensionali non lineari, per i quali in generale non esistono soluzioni analitiche
come nel caso dell’oscillatore armonico semplice. Tale esempio tuttavia ci è ancora
molto utile, per cercare di dare la risposta.
Anche nel caso 2-dimensionale, è utile visualizzare il campo vettoriale in termini
del moto di un fluido ideale immaginario. Sarà sufficiente considerare il caso di un
fluido in moto stazionario sul piano di fase, con velocità vettoriale avente componenti
(ẋ, v̇) = (v, −ω 2 x). Allora, per trovare la traiettoria che parte dallo stato iniziale
(x0 , v0 ), basta porre una particella immaginaria o punto di fase e guardare come è
trasportata dalla corrente. La situazione è descritta in figura 14.
La corrente, come si vede, gira attorno all’origine; questo è un punto particolare,
xxiii
Figura 14: Interpretazione geometrica per il campo di fase dell’oscillatore armonico.
che assomiglia all’occhio di un ciclone: un punto di fase posto in quella posizione
vi rimarrebbe per sempre, poiché (ẋ, v̇) = (0, 0) quando (x, v) = (0, 0). Pertanto
l’origine è un punto fisso. Ciò nonostante, un punto di fase che partisse da qualsiasi
altra posizione, si metterebbe a girare attorno all’origine e ritornerebbe ad un certo
momento nella posizione iniziale. Tali traiettorie formano delle cosiddette orbite
chiuse. Ma che relazione c’è tra le orbite chiuse e i punti fissi e il problema fisico
di partenza, cioè la massa attaccata ad una molla ideale? La risposta è semplice. I
punti fissi corrispondono ad punti di equilibrio statico per il sistema; le orbite chiuse
corrispondono a moti periodici, cioè ad oscillazioni della massa.
A.12
Dipendenza da parametri: biforcazioni e catastrofi
Con l’esempio appena studiato abbiamo visto che aumentando le dimensioni dello spazio delle fasi la dinamica del campo vettoriale diventa più ricca, appaiono
infatti soluzioni periodiche, che abbiamo chiamato cicli. Nel caso di sistemi dinamici continui in una dimensione38 , come abbiamo visto, o le soluzioni si dispongono
all’equilibrio o tendono a ±∞. Ciò nonostante, i sistemi 1-dimensionali risultano
interessanti non appena il campo vettoriale dipende da dei parametri. In particolare, i punti fissi possono essere creati o distrutti o cambiare la loro stabilità. In altre
parole, cambiando la struttura del campo vettoriale, varia la natura qualitativa della
soluzione del nostro problema dinamico, cioè il tipo di moto che si determina a partire da un certo stato iniziale39 . Nello studio della dinamica, molto spesso appaiono
38
Facciamo qui riferimento a situazioni generiche, strutturalmente stabili; non consideriamo i
casi marginali corrispondenti al passaggio tra regimi dinamici differenti; si veda, a proposito, il
paragrafo A.13.5.
39
In effetti, nel vostro corso di studi avete certamente studiato esempi di problemi di secondo
grado (di geometria sintetica od analitica) dipendenti da un parametro. Tipicamente, allora eravate
interessati a contare le soluzioni reali del problema, al variare di un parametro, che descriveva una
xxiv
dei parametri, che hanno una precisa interpretazione fisica. Un fenomeno molto
interessante, noto col nome di biforcazione od anche catastrofe si ha quando una
variazione continua del parametro determina un cambiamento repentino e discontinuo delle proprietà del sistema. Per darvi un’idea di questo fenomeno guardate la
figura 15. Essa contiene una serie di 8 famose40 figure sviluppate da Fisher (1967) (si
Figura 15: Un esempio di catastrofe nella percezione visiva.
veda ad esempio [9], pag. 11), legate ad un repentino cambiamento nella percezione
visiva. La prima figura in alto a sinistra rappresenta una faccia, mentre l’ultima in
basso a destra si riferisce certamente ad una donna. Se guardiamo le figure una dopo
l’altra da sinistra e destra e dall’alto in basso, ci accorgiamo che, pur cambiando di
poco, ad un certo momento la nostra percezione cambia all’improvviso: da faccia a
donna.
A.13
Sistemi dinamici discreti e mappe 1-dimensionali
A.13.1
Premessa
Nel paragrafo A.3 abbiamo già parlato di sistemi dinamici discreti. Si tratta di
casi in cui il tempo è visto come una variabile discreta anziché continua. In alcuni
classe di casi geometricamente possibili.
40
Lavoro originale: G.H. Fisher, Preparation of ambiguous stimulus material in Perception and
Psychophysics, 2 pag. 421–422, 1967.
xxv
contesti scientifici risulta naturale considerare il tempo discreto: si pensi ad esempio
all’elettronica digitale, ad alcune parti delle scienze economiche e delle finanze, e
nello studio di certe popolazioni animali nelle quali le generazioni successive non si
sovrappongono. In particolare, nel nostro laboratorio di matematica voi studierete,
tra l’altro, modelli matematici (in particolare l’equazione logistica) che si applicano
allo studio delle popolazioni. Per fare ciò richiamiamo la vostra attenzione su alcuni
semplici concetti relativi all’iterazione di mappe.
In effetti, lo studio delle mappe è interessante in sé, poiché le mappe costituiscono
un formidabile laboratorio per analizzare fenomeni caotici. Le mappe sono capaci
di comportamenti molto più imprevedibili delle equazioni differenziali; negli ultimi
25 anni si sono fatti straordinari passi avanti nel loro studio, grazie soprattutto alla
crescente disponibilità dei computer e della grafica computerizzata. Forse vi potrà
sorprendere il fatto che oggi, grazie all’attrezzatura informatica del nostro Istituto,
saremmo in grado di ripercorrere con relativa facilità di calcolo alcune delle più
affascinanti scoperte sul caos ottenute da scienziati come May [3], Lorenz [1] od
Hénon [2].
Vi anticipiamo che quello che vi chiederemo di fare non sarà di studiare nuovi
concetti. Quello che vi inviteremo a fare sarà di sperimentare da voi l’affascinante
e, per alcuni versi, imprevedibile comportamento delle mappe. Grazie a questa
attività, siamo convinti che intuirete molte cose e sarete poi in grado di ragionare
su concetti difficili ed affascinanti come il rapporto tra comportamento caotico e
deterministico.
A.13.2
Alcune definizioni
Considerate una mappa 1-dimensionale, cioè una funzione continua F : R ⊇
I −→ I, di un sottoinsieme I della retta reale in sé stessa. Possiamo definire
una successione nel modo seguente:
½
x0 ∈ I
(condizione iniziale)
(42)
xn+1 = F (xn ) , ∀n ≥ 0 (legge di ricorrenza)
Le successioni del tipo (42) si dicono definite per ricorrenza o induzione e la funzione
F si chiama funzione generatrice.
I punti della successione {x0 , x1 = F (x0 ), x2 = F 2 (x0 ), . . . , xn = F n (x0 ), . . . , } costituiscono l’orbita, Ω(x0 ), generata dal valore assegnato x0 . Notiamo che con la
scrittura F n , intendiamo l’iterata n-esima della funzione F , cioé:
F n = |F ◦ F {z
◦ . . . ◦ F}
n volte
xxvi
(43)
Per lo studio del sistema dinamico discreto risultano fondamentali gli elementi x ∈ I
che soddisfano all’equazione:
F (x) = x ;
(44)
essi si dicono punti fissi o di equilibrio della funzione F . Avrete già capito che la
ragione del loro nome risiede nel fatto che l’orbita generata da un punto fisso x, si
riduce al punto stesso, cioè Ω(x0 = x) = {x}. Da un punto di vista geometrico, le
soluzioni dell’equazione (44) possono essere interpretate come le ascisse degli eventuali punti di intersezione tra il grafico di F e delle funzione identità y = x. Avendo
in mente l’analogia col sistema continuo oscillatore armonico, è naturale ora definire
la nozione di orbita periodica come una successione del tipo:
x0 , x1 , x2 , . . . , xp−1 , xp = x0 , x1 , x2 , xp−1 , x0 , x1 . . .
(45)
con x0 6= x1 6= . . . 6= xp−1 e xp = x0 . L’intero p si dice il (minimo) periodo dell’orbita
e i punti della stessa sono periodici di periodo p.
Esercizio 6: Dimostrate che i punti x0 , x1 , . . . , xp , di un’orbita periodica di periodo
p sono fissi per l’iterata p-esima di F .
A.13.3
Analisi geometrica dell’iterazione di una funzione: il diagramma
a ragnatela
Nel caso di mappe 1-dimensionali è possibile ricorrere ad un metodo grafico molto
utile, detto diagramma a ragnatela41 , per studiare l’iterazione. Consideriamo il
grafico di F e, partendo da x0 , ricaviamo x1 . Esso è l’ordinata del punto sul grafico
di F che ha ascissa x0 . Per trovare ora x2 è necessario riportare sull’asse delle ascisse
tale valore. per farlo, è sufficiente muovere parallelamente all’asse delle ascisse il
punto del grafico (x0 , x1 ), fino ad incontrare la prima bisettrice. Individuato in
figura il punto di coordinate (x1 , x1 ) basta ora spostarlo parallelamente all’asse delle
ordinate fino ad incontrare il grafico di F nel punto (x1 , x2 ). A partire da tale
punto, ripetendo il procedimento appena descritto, possiamo ottenere x3 , e cosı̀
via. Si osservi che nella figura la successione di punti sul grafico tende al punto di
intersezione tra la retta y = x e y = F (x).
Le equazioni del tipo (42) definiscono un sistema dinamico discreto 1-dimensionale.
Come nel caso continuo, tale sistema si dirà lineare o non lineare a seconda della
natura della funzione F .
41
È denominato cobweb diagram nei testi in lingua inglese.
xxvii
Figura 16: Il diagramma a ragnatela per la funzione F = x−1/2 .
1.75
1.5
1.25
1
0.75
0.5
0.25
0.25
A.13.4
0.5
0.75
1
1.25
1.5
Comportamento di un sistema lineare discreto 1-dimensionale
Vogliamo ora analizzare il comportamento di un generico sistema lineare discreto
1-dimensionale, di cui abbiamo fornito un esempio particolare nel paragrafo A.3.
Consideriamo il sistema la cui funzione di evoluzione è f (x) = ax + b, con a, b ∈ R.
Dalla definizione ricorsiva:
xn+1 = axn + b ,
(46)
lasciamo a voi come esercizio42 di provare che il termine n-esimo della successione
(di valore iniziale x0 ) può essere scritto come:
µ n
¶
a −1
n
a x0 +
b
se a =
6 1
.
(47)
xn =
a−1
x0 + nb
se a = 1
Durante la nostra attività di laboratorio, avrete modo di “intuire sperimentalmente”, usando il calcolatore, quale sia il comportamento asintotico di un sistema
dinamico lineare come quello dell’eq. (47), cioè il limite a cui tende xn per n → +∞.
I ragazzi del Quinto anno potranno facilmente dimostrare i risultati, che per tutti
riassumiamo nella tabella 3, in cui risulta essenziale distinguere tre casi, a seconda
42
Vi sarà utile ricordare l’espressione della somma dei primi n termini di una progressione
geometrica di ragione a e termine iniziale 1.
xxviii
che sia |a| < 1, oppure |a| = 1, oppure |a| > 1. Nel risultato esposto, un ruolo
b
particolare è assunto dal punto x̃ =
. Si tratta del punto fisso per la funzione
1−a
F (x), cioè del valore per cui F (x̃) = x̃. Anche nel caso discreto vale quindi una
nozione di stabilità del tutto simile a quella introdotta nel paragrafo A.6.1 per i
sistemi dinamici continui. Ricordiamo tuttavia che l’unica differenza sta nel fatto
che, nel caso di un’equazione di evoluzione continua del tipo ẋ = f (x), i punti fissi
per il campo f (x) sono quelli per cui f (x) = 0.
Naturalmente, la costruzione geometrica del diagramma a ragnatela si applica
anche al caso lineare. Potrete allora comprendere il contenuto della tabella, applicando tale tecnica per il grafico di F , che, come ben sapete, rappresenta una retta
nel piano cartesiano.
A.13.5
Sistemi dinamici discreti 1-dimensionale non lineari
Nel paragrafo A.7 avevamo trattato il problema della stabilità nel caso 1-dimensionale
continuo. Avevamo utilizzato una procedura di linearizzazione. Una tecnica analoga
si può applicare anche nel caso discreto. Supponete che x̃ sia un punto fisso per F ,
cioè che si abbia F (x̃) = x̃. È ormai chiaro che se xn = x̃, allora l’orbita rimarrà
in x̃ per tutte le successive iterazioni. Per studiare la stabilità di x̃, consideriamo
un’orbita vicina, che indicheremo con xn = x̃ + ηn e chiediamoci se tale orbita viene
attratta o respinta da x̃. In altre parole, la deviazione ηn aumenta o diminuisce al
crescere di n? Basterà sostituire:
x̃ + ηn+1 = xn+1 = F (x̃ + ηn ) = F (x̃) + F 0 (x̃)ηn + O(ηn 2 ) ,
(48)
dove col simbolo O(ηn 2 ) intendiamo43 che nello sviluppo in serie di Taylor di f
trascuriamo i termini quadratici in η. Ricordando che x̃ è un punto fisso, si ottiene
l’equazione discreta linearizzata:
ηn+1 = F 0 (x̃)ηn
(49)
Se è lecito trascurare i termini quadratici in η, l’equazione linearizzata dipende dal
moltiplicatore (detto anche autovalore) λ = F 0 (x̃), che rappresenta la pendenza della
retta tangente al grafico di f nel suo punto fisso x̃. Si tratta allora di un sistema
1-dimensionale, per cui possiamo applicare l’analisi della tabella 3 per a = λ e b = 0.
Se |λ| = |F 0 (x̃)| < 1 allora ηn → 0 per n → ∞, e il punto fisso x̃ è linearmente
stabile. Viceversa, se |λ| = |F 0 (x̃)| > 1 il punto fisso è instabile. Sebbene queste
43
Per i ragazzi di V PNI! Per gli altri, si tratta sempre di approssimare il grafico della funzione
con una retta, come descritto nel caso continuo.
xxix
a
b
x0
|a| < 1
→
|a| > 1
a=1
a = −1
Comportamento di xn per n → +∞
b
1−a
6=
b
1−a
diverge
=
b
1−a
rimane fisso in
b
1−a
b 6= 0
diverge
b=0
rimane fisso in x0
6=
b
2
oscilla: x0 , b − x0 , . . .
=
b
2
rimane fisso in
b
2
Tabella 3: Comportamento asintotico del sistema discreto 1-dimensionale xn =
axn−1 + b, e condizione iniziale x0 , in dipendenza dei parametri reali a e b. Nel caso
in cui una casella è vuota si intende “nessuna ulteriore condizione”.
.
xxx
conclusioni circa la stabilità locale siano basate sulla linearizzazione, si potrebbe
provare che valgono44 per la mappa non lineare F . È comunque necessario osservare
che la linearizzazione non dice nulla a proposito del cosı̀ detto caso marginale, per cui
|λ| = 1. Sono proprio i termini trascurati di tipo O(ηn 2 ) che determinano la stabilità
locale45 . Concludiamo il paragrafo introducendo un’importante definizione: dato
un punto fisso attrattivo x̃ per un sistema dinamico, diciamo bacino di attrazione
l’insieme delle condizioni iniziali x0 per le quali xn → x̃ se n → ∞.
A.14
La nostra attività di laboratorio
Vorremmo ora parlare dell’oggetto principale della nostra attività di laboratorio di
matematica connessa al Progetto Lauree Scientifiche. Queste brevi note si proponevano, tra l’altro, di farvi riflettere sui collegamenti che il tema dei sistemi dinamici
naturalmente instaura tra molti contenuti dei nostri corsi istituzionali di matematica e di fisica. Come avete visto, si va dalle applicazioni della seconda legge di
Newton, alla dinamica dei fluidi ideali; dalle successioni definite in modo esplicito
a quelle definite per ricorrenza; dallo studio di argomenti del calcolo differenziale,
come derivate e limiti, a problemi di analisi numerica, come la determinazione approssimata degli zeri di una funzione. Il filo rosso che collega tutte queste nozioni,
apparentemente molto diverse tra loro, è l’idea di evoluzione temporale di un sistema. Se queste dispense sono riuscite a farvi pensare che varrà la pena investire un
po’ del vostro tempo a studiare i sistemi dinamici, allora avremo raggiunto lo scopo.
Se, viceversa, dopo averle lette (più o meno frettolosamente) penserete “Ma siamo
matti? È troppo difficile per noi! Ci sarà troppo da lavorare...” allora vi chiediamo
di ripensarci. Vi assicuriamo che non dovrete assolutamente sapere tutto ciò che qui
sta scritto, per affrontare il Progetto. Al contrario, noi speriamo che cammin facendo, dopo esservi divertiti durante la nostra attività, vi verrà voglia (o la curiosità)
di leggere, magari in parte, queste note. Se non credete a noi, vorremmo concludere
questa dispensa riportando quanto scrisse Robert M. May nel suo famoso lavoro [3]
pubblicato sulla rivista Nature46 : In spite of the practical problems which remain to
44
È necessario ipotizzare che la funzione F abbia derivata continua, sia cioè di classe C 1 .
Anche nel caso continuo, la situazione in cui F 0 (x∗ ) = 0 risulta determinata dalle derivate di
ordine successivo. Essa risulta significativa in teoria delle biforcazioni, quando il sistema dinamico
dipende da un parametro di controllo. I casi marginali corrispondono a situazioni critiche, nelle
quali si ha un repentino cambiamento della dinamica del sistema; si veda il paragrafo A.12.
46
Ecco la nostra libera traduzione: A dispetto dei problemi pratici che rimangono da essere risolti, le idee sviluppate in questa rassegna hanno ovvie applicazioni in molte aree. Le applicazioni
più importanti, tuttavia, possono essere nell’insegnamento. [...] Vorrei insistere affinché la gente
fosse, diciamo, introdotta allo studio dell’equazione (3) molto presto nella sua formazione matematica. Questa equazione può essere studiata fenomenologicamente iterandola su un calcolatore, o
45
xxxi
be solved, the ideas developed in this review have obvious applications in many areas.
[...] I would therefore urge that people be introduced to, say, equation (3) early in
their mathematical education. This equation can be studied phenomenologically by
iterating it on a calculator, or even by hand. Its study does not involve as much
conceptual sophistication as does elementary calculus. Such study would greatly enrich the student’s intuition about nonlinear systems. I più attenti avranno subito
pensato: ma cosa intendeva May con equazione (3)? Si tratta di una famosissima
equazione che descrive l’evoluzione di un sistema dinamico discreto, nota col nome
di equazione logistica:
xt+1 = axt (1 − xt ) .
(50)
Non intendiamo qui svelarvi tutto su di essa, visto che sarà anch’essa esaminata nel
nostro laboratorio del Progetto Lauree Scientifiche, però pensiamo valga decisamente
la pena anticipare qualcosa47 ...
A.14.1
L’equazione logistica
La dinamica della popolazione di molte specie animali è caratterizzata dal fatto che
non vi è sovrapposizione tra generazioni successive, cosı̀ la crescita della popolazione avviene in tappe discrete. Per gli organismi primitivi queste tappe possono
essere molto brevi, in tal caso un modello dinamico con tempo continuo, può essere
un’approssimazione ragionevole. Tuttavia, la durata delle varie tappe può cambiare
molto, da specie e specie. Per la nascita di un moscerino della frutta da una pupa basta un giorno, per delle cellule sono sufficienti delle ore, mentre per virus e
batteri addirittura molto meno. L’equazione (50) mette in relazione la popolazione
all’istante t + 1-esimo con la popolazione all’istante precedente, t-esimo. Per semplicità, assumiamo nella nostra descrizione che la popolazione venga descritta alla
distanza temporale di un anno.
Ciò porta ad un sistema dinamico discreto, in cui la funzione da iterare è non
lineare, cioè proprio F (x) = ax(1 − x). In realtà, risulta più comodo pensare che
un certo ambiente abbia una certe popolazione massima sostenibile di una data
specie, rappresentata dalla variabile adimensionale xt . Tale variabile rappresenta il
rapporto tra la popolazione reale e la popolazione massima alla t-esima generazione. Possiamo pertanto pensare che dobbiamo iterare la funzione F (x) sull’intervallo
[0, 1]. Il numero a denota il tasso di crescita relativo della popolazione, che supponiamo non dipendere dal tempo. Esso viene chiamato capacità biologica specifica.
perfino a mano. Il suo studio non richiede concetti cosı̀ sofisticati come il calcolo differenziale. Un
tale studio arricchirebbe enormemente l’intuizione dello studente sui sistemi non lineari.
47
Questa breve introduzione è ripresa dal paragrafo I moscerini della frutta e il caos in [8], pag.
170.
xxxii
La forma della funzione F che dà luogo all’equazione logistica (50) si basa sull’idea
che, quando in un dato ambiente la popolazione è scarsa e non vi è competizione
per lo spazio vitale o la ricerca del cibo, allora ogni generazione cresce rispetto alla
precedente di un fattore a, secondo una progressione geometrica. Tuttavia, al crescere della popolazione, le risorse di cibo tendono ad esaurirsi, pertanto aumenta la
competizione, che riduce il tasso di crescita di una quantità ax2 , sempre più rilevante
al crescere della popolazione. Nel 1976, l’ecologo matematico R. May osservò che
l’apparente semplicità della funzione F (x) è ingannevole.
Essa presenta infatti ogni sorta di comportamento dinamico complicato, al variare della capacità biologica specifica a. La dipendenza sensibile della natura della
soluzione della (50) dal parametro a è un esempio di biforcazione, del tipo di quella
che abbiamo descritto nel paragrafo A.12. Nel nostro laboratorio, esplorerete sperimentalmente tale varietà di comportamenti. In particolare vi renderete conto, che
per valori particolari del parametro a, nasceranno orbite aperiodiche: ciò vorrà dire
che, ad esempio, se in un certo anno la popolazione sarà piccola, i cinque anni seguenti sarà grande, seguirà poi un anno di popolazione media e quindi alcuni anni di
popolazione piccola, seguita da un anno di boom demografico e via dicendo. Saremo di fronte a sequenze arbitrarie di alti e bassi, senza alcuna regolarità apparente,
come quelli descritti in figura 17.
Figura 17: Un esempio di soluzione aperiodica dell’equazione logistica per a = 3.9.
xt
0.8
0.6
0.4
0.2
10
20
30
40
50
t
Questo è un esempio di caos deterministico. Quel che sorprese May non fu
il fatto che le popolazioni reali siano imprevedibili, ma il fatto che un modello cosı̀
semplice come l’equazione logistica (dopo tutto la funzione F (x) = ax(1−x) ha come
grafico una parabola!) abbia un comportamento tanto selvaggio. I tipi di dinamica
delle popolazioni che sono possibili nell’equazione logistica sono descritti dal famoso
xxxiii
diagramma di biforcazione, divenuto ormai un’icona del caos. Il diagramma riporta
in ascissa i valori del parametro a ed in ordinata alcuni valori di x quando, per un
numero abbastanza grande di iterazioni, la dinamica si stabilizza.
Figura 18: Il diagramma di biforcazione dell’equazione logistica per valori del parametro di
controllo 3.4 < a < 4.
Figura 19: Il diagramma di biforcazione dell’equazione logistica per valori del parametro di
controllo 3.847 < a < 3.857.
Riportiamo da ultimo due figure, dalle quali si può vedere che il diagramma
di biforcazione ha inaspettate proprietà di autosimilarità. Osservate che lo stesso
diagramma per valori diversi del parametro di controllo a ha una struttura che si
ripete (Fig. 18 e 19).
A questo punto molte sono le domande che ci possiamo porre: come è possibile
che una semplice equazione di evoluzione come quella logistica, la cui natura è
xxxiv
intrinsecamente deterministica, non consenta di rispondere alla domanda per la quale
è stata introdotta, cioè risulti incapace di predire l’andamento della popolazione della
nostra specie?
Può avvenire qualcosa di simile in Fisica, nel senso che la seconda legge di Newton
per la dinamica classica, pur essendo deterministica, possa risultare in taluni casi
incapace di predire l’evoluzione del nostro sistema dinamico? O posta altrimenti,
esiste una dipendenza non banale dell’evoluzione del sistema dallo stato iniziale dello
stesso?
E che significato ha la struttura di autosimilarità del diagramma di biforcazione
esposto nelle due ultime figure? Si tratta di frattali?
Se siete curiosi di rispondere a solo una di queste domande allora è proprio il
caso per voi di partecipare al P.L.S.!
xxxv
Riferimenti bibliografici
[1] E. N. Lorenz, Deterministic nonperiodic flow, J. Atm. Sci. 20, 130 (1963).
[2] M. Hénon, A two-dimensional mapping with a strange attractor, Comm. Math.
Phys. 50, 69 (1976).
[3] R. M. May, Simple mathematical models with very complicated dynamics,
Nature 261, 459 (1976).
[4] P. Collet e J-P. Eckmann, Iterated maps on the interval as dynamical systems,
Birkhäuser editore, Boston, 1980 (ISBN: 3-7643-3026-0).
[5] H.-O. Peitgen e P.H. Richter, La bellezza dei frattali, Bollati Boringhieri, 1987
(ISBN: 88-339-0420-2).
[6] S. H. Strogatz, Nonlinear Dynamics and Chaos, Perseus Book Publ.,
Cambridge Mass., 1994 (ISBN: 0-7382-0453-6).
[7] E. R. Scheinermann, Invitation to Dynamical Systems, Prentice Hall College
Div., New Jersey, 1995 (ISBN: 0-1318-5000-8).
[8] I. Stewart e M. Golubitsky, Terribili simmetrie, Dio è un geometra?, Saggi
Scientifici Bollati Boringhieri, 1995 (ISBN: 88-339-0914-X).
[9] J. D. Murray, Mathematical Biology I: An introduction III ed. Springer Verlag,
N.Y., Berlin, Heidelberg, 2001 (ISBN: 0-387-95223-3)
[10] J. Gleick, Caos, La nascita di una nuova scienza, R.C.S. Libri, BUR Scienza,
V ed., 2005 (ISBN: 88-17-25875-X).
[11] A. Vulpiani, Determinismo e Caos, Carocci editore, Roma, 2005 (ISBN: 88430-3216-X).
xxxvi
B
I lavori dei ragazzi
In questa seconda appendice presento gli elaborati svolti autonomamente dai ragazzi
del P.L.S. per la Matematica al Liceo “G. Galilei” di Adria. Si tratta di lavori che gli
studenti erano stati invitati a produrre a conclusione del loro impegno nei laboratori
pomeridiani dedicati allo studio dei sistemi dinamici.
Fu lasciata loro la più ampia libertà, sia per quanto riguarda la formazione dei
gruppi di lavoro, sia sul taglio da dare al loro approfondimento.
Come si vedrà, alcuni (i primi due contributi) hanno svolto una relazione sull’attività svolta nel laboratorio pomeridiano, riorganizzando ed ordinando il materiale prodotto. Di questi, il secondo ha posto maggiore attenzione sugli aspetti
computazionali (programmazione in Mathematica).
Alcuni studenti hanno invece preferito lavorare singolarmente, sviluppando alcuni argomenti particolari, tra cui un modello dinamico che descrive il corteggiamento (Love affairs) e lo studio dei fenomeni caotici nell’accrescimento delle cellule
tumorali.
Altri studenti hanno attinto alla letteratura consigliata, sviluppando alcuni argomenti esposti nel testo classico di Gleick (l’effetto farfalla e l’universalità delle
applicazioni di Feigenbaun).
Seppur di natura compilativa, questi elaborati dimostrano interesse, impegno e
sono a mio avviso un buon risultato, soprattutto perché sono stati sviluppati in
completa autonomia da studenti di classe quarta Liceo Scientifico.
A parte qualche minimo cambiamento (essenzialmente di formattazione) sono
riprodotti qui di seguito nella forma in cui sono stati presentati.
Si noteranno caratteri diversi da quelli di questo scritto48 , poiché per facilitare i
ragazzi, li abbiamo incoraggiati a produrre gli elaborati con il pacchetto commerciale
OFFICE, a disposizione nel laboratorio di informatica del nostro Istituto.
Desidero infine nominare, uno per uno, tutti i partecipanti al laboratorio matematico del Liceo Galilei. In ordine alfabetico: Alessi Filippo, Andriotto Daniele, Barbuiani Marco, Belluco Rita, Bertasi Federico, Casellato Francesco,
Cassari Francesco, Cisotto Luca, Crestale Claudia, Donolato Luca, Ferro
Sara, Forzato Giacomo, Frigato Mauro, Girardi Marco, Lunardi Giada,
Marzolla Alberto, Melis Federico, Paganin Paola, Passerella Valentina,
Pilotto Maria Chiara, Pilotto Michele, Ragaglia Isidoro, Rossi Matteo,
Siviero Laura, Tomasi Alessandro, Zerbin Andrea, Zerbin Matteo.
48
Per il quale ho utilizzato LaTeX2e.
I
Progetto Lauree Scientifiche
INTRODUZIONE AI SISTEMI DINAMICI
Nei giorni 13/03/06, 21/03/06, 31/03/06, 03/04/06, 12/04/06 si sono svolti gli
incontri del laboratorio di matematica per il Progetto Lauree Scientifiche, coordinato dai
professori B. Napolitano, M. Nicoli e G. Valente con la collaborazione di due docenti
dell’Università di Padova.
Durante queste riunioni abbiamo affrontato, in particolare, l’argomento relativo ai
sistemi dinamici, il cui scopo è quello di studiare un fenomeno in relazione alla sua
evoluzione nel tempo. Definendo il concetto di sistema dinamico, possiamo evidenziare
due elementi costitutivi fondamentali:
1. un vettore di stato che descrive completamente lo stato del sistema
2. una funzione, cioè una legge che ci dica, dato lo stato del sistema in un certo
istante, quale sarà lo stato del sistema negli istanti di tempo successivi, ovvero
un’equazione di evoluzione con la quale si possa predire il “futuro” del sistema.
Abbiamo studiato due tipi di sistemi: quelli discreti, nei quali il tempo è considerato una
variabile discreta, cioè una successione di istanti separati da intervalli regolari (per
esempio il saldo di un conto in banca, valutato ogni mese). Nei sistemi continui, invece,
il tempo di evoluzione del fenomeno deve essere considerato una variabile che scorre in
modo continuo (esempi di sistemi continui vengono della fisica classica: il pendolo e
l’oscillatore armonico).
Per comprendere il meccanismo dei sistemi dinamici non ci siamo limitati a studiarne
solo la teoria, ma grazie all’utilizzo del programma “Mathematica” abbiamo potuto
constatare l’ importanza che la matematica riveste nella realtà. Questa, infatti, è in grado
di descrivere molti fenomeni
con i quali quotidianamente veniamo a contatto: dal campo della ingegneria a quello
della biologia, dalla medicina alla fisica e alla economia. Il “Mathematica” si è rivelato
uno strumento utile a tale scopo, permettendoci di comprendere facilmente la natura di
fenomeni complessi come l’andamento della crescita della popolazione e l’interazione
fra popolazioni differenti. Valutiamo globalmente positiva l’esperienza che abbiamo
vissuto e ne offriamo un breve resoconto nelle pagine che seguono.
1. I SISTEMI DISCRETI
IL MODELLO MALTHUSIANO E DI VERLHUST
Il modello di Malthus e di Verlhust possono essere considerati due esempi di sistemi
lineari discreti unidimensionali.
Durante il primo incontro di “PLS” è stato studiato il modello maltusiano, indicandolo
in questo modo:
III
f(x)=(1+k )x
(1)
Attraverso questo successione (definita per ricorsione) e per mezzo del Mathematica
abbiamo potuto studiare come, data una popolazione iniziale x[0] = x0, questa si
comporti al variare del parametro k, denominato coefficiente di accrescimento.
Se k è molto piccolo, ovvero tende a zero, allora la funzione diventa f(x) = x, quindi la
popolazione non cresce; mentre se k è molto grande, la popolazione tende a crescere in
maniera esponenziale, senza mai arrestarsi.
7000
6000
5000
4000
3000
2000
1000
10
20
30
40
50
=Figura1=
IN SINTESI:
• Se k→ + ∞ => la popolazione esplode (cresce all’infinito);
• Se k→ 0 => la popolazione non cresce.
Durante il secondo incontro abbiamo, invece, preso familiarità con il modello di
Verlhust, il quale, pur essendo apparentemente simile a quello precedente, si comporta
in certe situazioni in modo differente. Lo abbiamo definito in questo modo:
f(x)=(1+k) x-h x2
(2)
L’elemento h x2 rallenta la crescita della popolazione, essendo h è chiamato coefficiente
logistico.
Tale funzione è stata analizzata al variare di h. Se h = 0 allora ritroviamo il modello
maltusiano; se h è molto piccolo, ovvero vicino allo zero, allora la popolazione cresce in
maniera esponenziale; se, invece, h è molto grande la popolazione cresce fino ad un
certo punto, poi tende a stabilizzarsi, raggiungendo quindi il livello di saturazione
(“equilibrium”).
1000
80000
300000
250000
200000
150000
100000
50000
800
60000
600
40000
400
20000
20
40
60
80 100
200
20
40
60
80 100
20
40
60
80
100
=Figura2=
IV
Anche se in maniera alquanto approssimativa, si può vedere come nel primo grafico la
popolazione cresca all’infinito (h=0); nel secondo h tende allo zero, quindi la funzione
cresce in maniera esponenziale; nell’ultimo la popolazione cresce, ma , dopo poco, si
stabilizza e raggiungendo il livello di saturazione. Nelle ascisse sono stati riportati gli
anni e nelle ordinate il numero di individui.
IN SINTESI:
• Se h→ + ∞ => la popolazione cresce e raggiunge il livello limite;
• Se h→0 => modello di Malthus.
Si può inoltre vedere che, data xn = (k+1) xn-h x2
se xn = x tale che x = kx + x-hx2
kx-hx2=0 quindi x(k-hx)=0
=>
le cui soluzioni sono:
(s1)
x=0
e
(s2)
x = k/h
IN SINTESI
• Se h→ + ∞ => nella s2 , al crescere di h, x ≈ 0;
• Se h→0 => s2 perde di significato.
100000
80000
60000
40000
20000
25
50
75
100
125
150
175
200
=Figura3=
Questo grafico rappresenta lo studio di più popolazioni secondo il modello di Verlhust
(con h>0), il quale è stato integrato con il diagramma di campo vettoriale.
Successivamente, abbiamo considerato h e k al variare del tempo ed abbiamo notano
che, se h >0, la funzione tende sempre all’equilibrio, l’unica differenza consiste nella
presenza di piccole oscillazioni, quasi impercettibili.
V
1000
800
600
400
200
20
40
60
100 Figura4=
80
DINAMICA DI DUE POPOLAZIONI INTERAGENTI
Durante il terzo incontro abbiamo abbandonato i sistemi lineari e ci siamo avventurati
con quelli non lineari in due dimensioni.
Abbiamo preso in considerazione due popolazioni di animali (lepri e volpi) non isolate,
ma che interagiscono tra di loro e definito tale funzione:
f[{x_,y_}]:={ ax-h x2-bxy , cy+dxy}
(3)
dove ax-hx2 è l’equazione di evoluzione delle lepri; -bxy indica l’incontro tra lepri e
volpi in cui le lepri muoiono; cy indica le volpi e dxy le volpi che crescono dopo
l’incontro con le lepri.
Studiando tale funzione, abbiamo potuto notare che le due popolazioni interagendo
raggiungono un punto di equilibrio, ovvero centro di equilibrio (il puntino nero al centro
della spirale nel disegno 5).
964
963
962
1110
1111
1112
=Figura5=
Se h varia o se una delle due popolazioni iniziali (oppure entrambe) varia, il grafico
risultante non cambia in maniera significativa. Si può affermare che il grafico non è
VI
sensibile alle variazioni e che quindi il livello di saturazione limite non cambia.
Parliamo dunque di sistema non sensibile alle variazioni.
Grazie all’utilizzo del Mathematica siamo stati in grado di realizzare il grafico vettoriale
dell’interazione fra le due popolazioni di animali. Prima abbiamo creato un grafico
costituito da soli vettori, poi lo abbiamo sovrapposto all’immagine 5.
Questo è il risultato che abbiamo ottenuto.
5000
4000
3000
2000
1000
500
1000
1500
2000
2500
3000
=Figura6=
Successivamente, abbiamo studiato l’andamento del grafico delle singole popolazioni
(questa volta non interagenti fra di loro) al variare del tempo ed abbiamo notato che
ognuna delle due varia in maniera significativa al trascorrere degli anni. Aumentando il
tempo, però, entrambe le popolazioni tendono all’equilibrio, ovvero non cresco e non
calano, ma si stabilizzano su un determinato valore.
3000
2500
2000
1500
1000
500
50
100
150
200 =Figura7=
Il sistema di equazioni che ci permette di studiare tale fenomeno è così definito:
x = ax-hx2-bxy
y = cy+dxy
(4)
VII
2. Sistemi dinamici continui
DEFINIZIONE
Come per gli altri sistemi dinamici, anche i sistemi continui sono funzioni
definite da una condizione iniziale ben precisa e da una legge che indica in ogni istante
quale sia lo stato del sistema, permettendo anche di prevedere quale sarà l'andamento
futuro del sistema stesso negli istanti di tempo successivi. Tuttavia, mentre nei sistemi
dinamici discreti il tempo procede "a passi" (ovvero si considerano blocchi di tempo
uno dopo l'altro), nei sistemi continui il tempo trascorre in modo, come dice il nome,
continuo. Infatti consideriamo istante per istante, secondo per secondo, l'evolversi del
sistema continuo.
DIFFERENZA TRA SISTEMI CONTINUI LINEARI E NON
LINEARI
I sistemi dinamici continui possono essere divisi in due differenti tipi: quelli
lineari e quelli non lineari. I sistemi lineari possono essere considerati uniformemente,
senza che le parti del sistema possano interagire tra di loro (è il caso della popolazione
isolata che cresce in maniera esponenziale secondo il modello di Maltus). Questo tipo di
sistemi può essere diviso in parti, e ciascuna parte può essere risolta separatamente per
ottenere poi la risposta finale.
In molti casi, tuttavia, possono nascere iterazioni non lineari: queste sono solite
comparire quando le parti di un sistema continuo interferiscono, cooperano o
competono fra di loro. In questi casi, si possono ottenere alla fine numerosi effetti, e in
natura ve ne sono molti esempi, sia in ambito fisico sia per quanto riguarda la dinamica
delle popolazioni.
LA FISICA E I SISTEMI DINAMICI CONTINUI LINEARI
La maggior parte dei casi in cui il tempo trascorre in maniera continua è
descritta dalla fisica classica, sia per quanto riguarda i casi lineari che per quelli non
lineari (questi ultimi rientrano ad esempio nel meccanismo di funzionamento dei laser).
Sistemi continui lineari sono ad esempio l'oscillatore armonico, il moto di una palla
lanciata verticalmente e il moto di un pendolo.
In tutti questi casi, il tempo viene considerato in maniera continua, ovvero viene
considerato istante per istante: si ricorre infatti ai concetti di velocità istantanea e
accelerazione istantanea.
Nel caso della palla lanciata verticalmente verso l'alto il sistema dinamico è descritto in
ogni istante da una coppia di numeri reali che costituiscono un vettore a due dimensioni
(l'altezza h e la componente della velocità v in direzione verticale della palla).
In questi esempi non ha senso chiedersi cosa avvenga ad un istante successivo t(1)
(come invece possiamo fare per sistemi dinamici discreti ), perché il tempo trascorre in
maniera continua. Come in tutti i sistemi dinamici è indispensabile definire la
condizione iniziale del sistema.
Per descrivere il moto di una palla lanciata verticalmente verso l'alto, abbiamo come
configurazione iniziale:
VIII
h(0) = h0
v(0) = v0
Mentre le equazioni che ci descrivono il moto sono:
h(t) = h0 + v0 t -(1/2) g t2
v(t) = v0 - g t
Per quanto riguarda l'oscillatore armonico la configurazione iniziale é data:
x(0) = x0
v(0) = v0
Le leggi che descrivono l'evoluzione del sistema sono:
x(t) = x0 cos w t + (v0 /w ) sin w t
v(t) = v0 cos w t - x0 w sin w t
Abbiamo qui descritto due casi di sistemi dinamici ad andamento continuo della fisica
classica. Anche per essi è possibile descrivere il diagramma nello spazio delle fasi.
IL DIAGRAMMA NELLO SPAZIO DELLE FASI
Supponiamo di conoscere il sistema che descrive il moto di un pendolo semplice.
In ogni istante, le soluzioni sono date della coppia di funzioni x1(t) e x2(t) che
rappresentano la posizione e la velocità del pendolo in ogni istante successivo.
Se rappresentiamo le coppie ( x1, x2) in uno spazio astratto (detto appunto spazio delle
fasi), otteniamo una particolare traiettoria che descrive l'evolversi del sistema dinamico.
E' evidente che le coppie siano valori dipendenti dal tempo, che noi immaginiamo
trascorra all'infinito in maniera continua.
Ammesso ciò, ci si rende conto che lo spazio delle fasi è completamente riempito di
traiettorie, poiché ogni punto può rappresentare una condizione iniziale, cioè l'inizio di
un moto possibile. L'importanza del diagramma delle fasi é che, data una certa
traiettoria, è possibile trarre da questa informazioni sulla natura del sistema che essa
rappresenta.
LA MAPPA LOGISTICA
Durante il quarto incontro del Progetto Lauree Scientifiche abbiamo trattato sistemi
discreti costruendo di essi una rappresentazione utile a capirne l’andamento asintotico.
Abbiamo preso in considerazione una parabola di equazione y = m x (1-x), e la retta y =
x bisettrice del primo e del terzo quadrante; inizialmente abbiamo posto m = 3 e preso
un punto (x0; 0) e lo abbiamo iterato, ovvero lo abbiamo riportato, modificandone le
coordinate di conseguenza, dalla parabola alla retta, e dalla retta di nuovo alla parabola
per un certo numero di iterazioni. Si è venuta a creare una costruzione a ragnatela.
1
0.8
Questo
è
il
disegno
preparatorio
della parabola e della retta.
0.6
0.4
=Figura 8=
0.2
0.2
0.4
0.6
0.8
1
IX
1
0.8
0.6
0.4
0.2
0.2
0.4
0.6
0.8
1
=Figura9=
In questo grafico abbiamo iterato il nostro punto iniziale e posto m un po’ più grande di
3, quindi notiamo che la ragnatela non raggiunge un punto fisso, ma si crea una sorta di
buco attorno al quale saltella. Successivamente abbiamo preso m un po’ più piccolo di
3: in questo caso la ragnatela tende ad un punto di equilibrio.
IN SINTESI
Se m < 3 allora la costrizione tende ad un punto fisso (“equilibrium”);
Se m > 3 allora nella costruzione si crea un “buco”.
1
0.8
0.6
0.4
0.2
0.2
0.4
0.6
0.8
1
=Figura 10=
Questo è il risultato che abbiamo ottenuto ponendo m < 3.
Successivamente, abbiamo studiato altri casi in cui la soluzione di equilibrio attrae
orbite di ordine 2, poi di ordine 4 e abbiamo visto che si creano varie biforcazioni.
Abbiamo capito, quindi, che il sistema può avere infinite biforcazioni , ma dopo un
X
certo valore limite (ovvero per m = 3.75 nel nostro caso; N.B.: m = 3 è un valore
assolutamente generico) si crea una situazione caotica.
Riportiamo quindi i vari grafici che abbiamo ottenuto e la mappa logistica finale in cui
si possono notare le varie biforcazioni del nostro sistema e la zona in cui, dopo quel
determinato valore limite, si crea il caos.
1
Questa è una
delle
varie prove
che
abbiamo fatto
0.8
0.6
0.4
=Figura 11=
0.2
0.2
0.2
0.4
0.4
0.6
0.8
1
0.6
0.8
1
0.9
0.8
0.7
=Figura 12=
0.6
0.5
0.4
0.3
1
=Figura 13=
0.8
0.6
=Figura 12=
=Figura 13=
0.4
0.2
0.2
0.4
0.6
0.8
XI
1
La mappa logistica
Proponiamo il metodo per ricavare gli zeri di una funzione tramite il metodo delle
tangenti di Newton che può essere usato durante lo studio di un sistema dinamico.
=Figura14=
Metodo delle tangenti di Newton
Esistono, all’interno dell’analisi matematica, diversi metodi per determinare gli zeri di
una funzione, ovvero dove essa si annulla.
Analizziamo qui di seguito quello delle tangenti di Newton, che permette, inoltre, di
costruire un sistema dinamico discreto a partire da una funzione continua.
Prendiamo in considerazione l’equazione f ( x ) = 0 (continua e derivabile in un
intervallo [a, b] , con f ′( x ) ≠ 0 ) e supponiamo di aver accertato graficamente l’esistenza
e l’unicità di una radice r in tale intervallo [a, b] .
y
5
L’idea è di costruire una successione {x n } che sia
convergente ad r affinché ogni xn possa essere considerato 4
un’approssimazione di r stessa.
3
Si parte da x0 = a [in fig. x0 = 0.3 ] e “si linearizza
l’equazione f ( x ) = 0 in quel punto”; si sostituisce cioè a 2
y = f (x) l’equazione della retta tangente al grafico di f
1
nel punto ( x0 , f ( x0 )) , ovvero y = f ( x 0 ) + f ′( x0 )( x − x 0 ) e
0.5 1 1.5 2 2.5 3
anziché calcolare f ( x ) = 0 , si risolve l’equazione
-1
f ( x0 ) + f ′( x0 )( x − x0 ) = 0 la quale ammette come
f ( x0 )
[in fig.: x1 = 0.961192 ].
f ′( x0 )
Il procedimento si ripete con x1 al posto di x 0 risolvendo
radice x1 = x0 −
-2
-3
f ( x1 )
[in
f ′( x1 )
fig.: x2 = 2.04 ]. Iterando n-volte il procedimento, si giunge alla seguente successione
per ricorrenza:
cioè l’equazione f ( x1 ) + f ′( x1 )( x − x1 ) = 0 che ha come soluzione x 2 = x1 −
XII
x
3.5
4
f ( x n −1 )
f ′( x n −1 )
E’ intuitivo che nel caso rappresentato in figura per n → +∞ x n → r ; qui f (x ) è
convessa (ma potrebbe anche essere concava) in [a, b] e f ′(x ) non si annulla mai.
Il processo di linearizzazione di f ( x ) = 0 può avvenire anche partendo da x0 = b ,
tuttavia la velocità di convergenza aumenta, nel caso appunto di funzioni concave o
convesse derivabili almeno due volte, a partire da un punto x 0 tale che f ( x 0 ) abbia lo
stesso segno di f ′′( x 0 ) .
x0 = a ;
x n = x n −1 −
Formalizziamo il procedimento fin qui analizzato:
sia f ∈ C 2 ([a, b]) tale che
• esiste un solo r ∈ ( a, b) tale che f ( r ) = 0
•• ∀x ∈ f ′( x ) ≠ 0 e f ′′( x 0 ) >0 oppure f ′′( x 0 ) <0
allora la seguente successione
x0 = a se f ( a ) f ′′( a ) >0
oppure
x0 = b se f (b) f ′′(b) >0
f ( x n −1 )
converge a r per n → +∞
f ′( x n −1 )
Dimostrazione
Esaminiamo il caso quando f (a ) e f ′′(a ) sono positive. Abbiamo dunque che
f ′′( x 0 ) >0 e f ′(x ) <0 , ∀x ∈ [ a, b] . Ne segue che ∀n ≥1, x n −1 < x n < r . La successione
{x n } , monotona crescente e limitata, è convergente al limite l ≤ r . Passando al limite di
f ( x n −1 )
f (l )
x n = x n −1 −
da cui
si ottiene, poiché f e f ′ sono continue, l = l −
f ′( x n −1 )
f ′(l )
f (l ) = 0 ⇒ l = r
Gli altri casi si dimostrano in modo analogo.
e x n = x n −1 −
Esercizio
Consideriamo l’equazione f ( x) = e − x − 2 x = 0 . Confrontando i grafici di y = e − x e
y = 2 x si ottiene che esiste un’unica radice r
y
compresa tra 0 e 1.
1.4
Abbiamo f ′( x) = −e − x − 2 <0 ∀x ∈ [0,1]
−x
f ′′( x) = e >0
∀x ∈ [0,1]
1.2
inoltre f (0) = 1 >0 e f (1) = 1 e − 2 <0.
1
Per il calcolo di r poniamo dunque:
0.8
e − xn −1 − 2 x n −1
x n = x n −1 +
x0 = 0
e − xn −1 + 2
0.6
Usando una comune calcolatrice troviamo,
0.4
considerando sei cifre decimali dopo la virgola:
x1 = 0,333333
0.2
x 2 = 0,351689
0.2 0.4 0.6 0.8
XIII
1
1.2 1.4
x
x3 = 0,351733
x 4 = 0,351733
Da x3 in poi le sei cifre si stabilizzano. Notiamo, quindi, che e − x − 2 x ≈ 1,922 ⋅ 10 −6 .
Un buon risultato solo dopo tre iterazioni.
OSSERVAZIONE: il calcolo delle approssimazioni x1 , x2 , x3 ,... , deve essere, in
generale, prolungato fino a che i decimali del risultato non variano più (conformemente
al grado di precisione dato).
f ( x n −1 )
può essere considerata come un sistema dinamico
f ′( x n −1 )
discreto, la cui funzione di evoluzione X è così definita:
xn = xn−1 + X ( xn−1 )
f ( xn−1 )
osserviamo che x * è una radice per f (x ) se e solo se x * è
dove X ( xn−1 ) = −
f ′( xn−1 )
un punto di equilibrio per il sistema dinamico discreto.
Si definisce punto di equilibrio (o punto fisso) di una funzione F quel numero che
viene trasformato in se stesso da F .
L’equazione x n = x n −1 −
Elaborato degli alunni:
Belluco Rita
Forzato Giacomo
Paganin Paola
Passerella Valentina
Pilotto Maria Chiara
Rossi Matteo
XIV
Zerbin Matteo, Melis Federico, Crestale Claudia
Modelli matematici per la dinamica di una popolazione
Introduzione
Il Liceo Scientifico "G. Galilei" è stato scelto come Scuola Polo al Progetto Nazionale
Lauree Scientifiche per la Matematica. Lo scopo dell’attività, rivolta ad un gruppo di
ragazzi volontari delle classi Quarte e Quinte è promuovere l’interesse degli studenti
verso le lauree delle Facoltà di Scienze Matematiche, Fisiche e Naturali, con particolare
attenzione, verso il corso di laurea in Matematica. Nei cinque incontri organizzati dalla
prof.ssa Beatrice Napoletano, dal prof. Matteo Nicoli e dal prof. Gianpaolo Valente, in
collaborazione con i professori universitari dott. Andrea Giacobbe e dott.ssa Olga
Bernardi, sono stati affrontati vari argomenti attinenti in certi casi ai sistemi dinamici e
alla dinamica deterministica e caotica. È stato possibile ragionare insieme su tali
questioni, e siamo riusciti a comprendere che una descrizione matematica della realtà
consente di conoscere in anticipo l’evoluzione temporale di un sistema, noto il suo stato
iniziale. Il gruppo di lavoro è stato suddiviso inizialmente in due parti, uno dedito al
campo teorico sotto la guida della prof.ssa Beatrice Napoletano e del prof. Matteo
Nicoli, l’altro indirizzato al campo pratico con l’aiuto del prof. Gianpaolo Valente, del
dott. Andrea Giacobbe e della dott.ssa Olga Bernardi. Prima della conclusione
dell’attività giornaliera ci si incontrava per discutere di quanto appena appreso, al fine di
poter unire la teoria con la pratica in maniera più rapida ed interessante attraverso la
partecipazione diretta degli studenti.
L’attività di laboratorio è stata concentrata sullo studio della crescita delle popolazioni
secondo vari modelli (Malthus, Verlhust, con variazioni stagionali, con popolazioni
interagenti,…) e sull’evoluzione di un sistema dinamico discreto,descritto attraverso
l’equazione logistica.
L’equazione logistica
Generalmente, quando si studia la dinamica della popolazione di molte specie animali,
si tende a utilizzare un modello dinamico con tempo continuo, considerando la
possibilità che vi sia la sovrapposizione tra generazioni successive. Tuttavia, la durata
delle tappe che determinano la crescita delle popolazioni può variare. Consideriamo, ad
esempio, l’equazione
x t+1 = a x t (1 – xt )
che mette in relazione la popolazione all’istante t+1-esimo con la popolazione
dell’istante precedente t-esimo, nella distanza temporale di un anno. Tutto ciò porta a
prendere in considerazione un sistema dinamico discreto, in cui la funzione da iterare
risulta avere la forma: F(x) = a x(1-x).
In realtà, può risultare più facile considerare che per una data specie, ci sia un valore
massimo della popolazione sostenibile in un certo ambiente; tale valore massimo può
essere rappresentato con la variabile dimensionale xM. Ponendo ora X t = x t / xM , la
nuova variabile adimensionale rappresenta il rapporto tra la popolazione reale alla tesima generazione e la popolazione massima.
A questo punto è sufficiente iterare la funzione F(X) sull’intervallo [0; 1]. Il numero a
rappresenta il tasso di crescita relativo della popolazione, che supponiamo non debba
dipendere dal tempo. Tale numero viene chiamato capacità biologica specifica. Tuttavia
XV
è necessario sottolineare che la forma della funzione F(X) che dà luogo all’equazione
logistica X t+1 = a X t (1 – Xt ), si basa sull’idea che, quando in un certo ambiente la
popolazione è scarsa e non vi è competizione, ad esempio per lo spazio vitale o la
ricerca del cibo, allora ogni generazione cresce rispetto alla precedente di un fattore a.
Tuttavia, crescendo la popolazione, le risorse di cibo tendono ad esaurirsi, di
conseguenza tende ad aumentare la competizione, che riduce il tasso di crescita di una
quantità a Xt2, sempre più rilevante al crescere della popolazione.
Ma la semplicità della funzione F(X) è ingannevole. Essa presenta infatti ogni sorta di
comportamento dinamico complicato, al variare della capacità biologica specifica a. La
dipendenza rilevabile della natura della soluzione dell’equazione logistica X t+1 = a X t
(1 – X t) dal parametro a è un esempio di biforcazione.
A supporto di tale considerazione, può essere utile aggiungere che, per particolari valori
del parametro a, potranno nascere orbite aperiodiche; ciò vorrà dire che, ad esempio, se
in un certo anno la popolazione sarà piccola, nei cinque anni seguenti sarà grande,
seguirà poi un anno di popolazione media e quindi alcuni anni di popolazione piccola,
seguita da un anno di un grande sviluppo demografico e via dicendo. Saremo di fronte a
sequenze arbitrarie di alti e bassi, senza alcuna evidente regolarità. Tutto ciò è un
esempio di caos deterministico.
In definitiva, dunque, sorprende l’imprevedibilità del modello (apparentemente
semplice) dell’equazione logistica, che tuttavia rappresenta in maniera concreta l’uguale
imprevedibilità che caratterizza la crescita delle popolazione reali.
Riportiamo di seguito il diagramma di biforcazione della mappa logistica nella variabile
adimensionale X, per diversi valori del parametro a:
Per ottenere questo grafico di biforcazione, sono state inserite le seguenti istruzioni del
programma Mathematica:
f[{a_,x_}]:={a,a x (1-x)};
pop[a_]:=Drop[NestList[f,{a,0.6},1000],900];
punti=Flatten[Table[pop[m],{m,2,4,0.001}],1];
XVI
ListPlot[punti,PlotStyle→{PointSize[0.001],RGBColor[1,0,0]},AxesLabel→{"Par.
a","X"}]
Il Modello di Verlhust
Nel 1837 il matematico-biologo olandese Verlhust propose di introdurre un termine che
tenesse conto della competizione fra individui della stessa specie.
Si utilizza un termine − h x2, dove h è una costante, dato che la media statistica del
numero di incontri fra due individui per unità di tempo è proporzionale a x2. Si
considera così come funzione da iterare :
F(x) = (1+k) x – h x2
In generale, la costante h sarà molto piccola rispetto a (1+k) x , in maniera tale che
quando (1+k) x non è troppo grande il termine − h x2, è trascurabile rispetto a (1+k) x, e
la popolazione cresce esponenzialmente. Quando (1+k) x diventa molto grande, il
termine − h x2 non è più trascurabile, e determina il rallentamento del rapido tasso di
crescita della popolazione.
Lo studio delle popolazioni è una branca della biologia che applica le conoscenze
matematiche e che consente, attraverso dei calcolatori, di poterne prevedere
l’evoluzione nel tempo. Il suo metodo di calcolo prevede dei dati iniziali e una funzione
che regoli l’evoluzione delle popolazioni. Un esempio di ciò è il modello di Verlhust.
La precedente funzione F(x) = (1+k) x – h x2 infatti mostra l’evoluzione di una
popolazione dopo aver assegnato determinati valori alle costanti. Di seguito sono
riportati esempi di come, variando k, varino gli andamenti della popolazione stessa,
passando da un’evoluzione semplice che porta all’equilibrio, oppure ad un andamento
periodico o addirittura al caos.
Pop.
1000
800
600
400
Anni
10
20
30
40
50
Esempio di andamento della popolazione a partire da 150 individui, con k=1 e h=0.001
XVII
Pop.
2100
2000
1900
1800
Anni
10
20
30
40
50
Esempio di andamento della popolazione a partire da 150 individui, con k=2 e h=0.001
Pop.
4000
3000
2000
1000
Anni
10
20
30
40
50
Esempio di andamento della popolazione a partire da 150 individui, con k=3 e h=0.001
Per ottenere i grafici appena riportati sono state inserite le seguenti istruzioni del
programma Mathematica:
<<Graphics`Colors`
F[ x_ ]:= (1+k) x – h x2
lista=NestList[F,150,50];
ListPlot[%,PlotStyle→Red, PlotJoined→True]
XVIII
Utilizzando gli stessi metodi, lo studio può essere allargato a due popolazioni
contemporaneamente. Per esempio Flores nel 1998 propose un modello di competizione
tra un’utopica convivenza tra l’uomo di Neanderthal e l’uomo moderno. Le funzioni che
indicano come evolvono le popolazioni sono queste:
f 1(x) = a x - h x 2 - s b x y,
f 2(x) = c y - k y 2 - d x y,
dove f 1 mostra come evolve la popolazione dei Neanderthal e f 2 quella dell’uomo
moderno. Si nota quindi che a, b, c, d, h, k, ed s sono i parametri.
I valori di a e c rappresentano il tasso di accrescimento delle due specie, h e k sono dei
coefficienti logistici che regolano l’aumento della crescita in modo che essa si stabilizzi
raggiunto un certo livello, b e d sono i coefficienti che descrivono l’incontro degli
uomini delle due popolazioni, s la differenza di mortalità delle stesse popolazioni.
In poche parole, con queste due funzioni si regola l’evoluzione delle singole
popolazioni non come se fossero isolate, ma interagendo tra loro. Stabilite le costanti,
che possono comunque variare stagionalmente nel tempo, e deciso il numero iniziale di
individui per specie, si può calcolare la loro l’evoluzione temporale.
Consideriamo dapprima il seguente caso, descritto nel linguaggio del Mathematica dal
codice:
a =1.3; c=0.95; h= 10^(-5); s = 0.1; b = 0.01; d= – 0.00001; k=0;
f[{x_,y_}]:= {a x - h x^2 – s b x y , c y - d x y};
listatutta=NestList[f,{7000,300},300];
ListPlot [ listatutta , PlotStyle→ {Red} , PlotJoined->True ,
AxesLabel->{"Neanderthal","Moderno"} ]
Moderno
270
260
250
240
Neanderthal
4500 4750 5000 5250 5500 5750
Per rappresentare l’andamento delle due popolazioni nei primi 150 anni basterà
considerare le istruzioni (in blu l’uomo di Neanderthal, in rosso l’uomo moderno):
XIX
neanderthal2=Table[listatutta[[i,1]],{i,300}];
moderno2=Table[listatutta[[i,2]],{i,300}];
MultipleListPlot[neanderthal2,moderno2,PlotStyle→{Blue,Red},
PlotJoined→True,SymbolShape→None, AxesLabel->{"Anni","Popolazione"}]
Popolazione
7000
6000
5000
4000
3000
2000
1000
Anni
50
100
150
200
250
300
I grafici precedenti indicano che, attribuendo determinati valori alle costanti, le
popolazioni evolvono, arrivando in un determinato momento ad una situazione di
equilibrio
In questo caso invece i grafici mostrano come una specie può portare l’altra
all’estinzione, con l’uso di altri valori per le costanti. Per esempio:
Neanderthal[0]=1500;
Moderno[0]=500;
a=3.00986;
b=0.885 ;
d=5 10^(-5);
c=0.355;
s=-2;
f[{x_,y_}]:={x (a-d (x+y)-b), y(c-d (x+y)-s b)}
lista=NestList[f,{1500,500},50000];
ListPlot[lista,PlotStyle→Red,PlotJoined→True]
XX
Se invece guardiamo l’andamento delle due popolazioni, otteniamo:
Il codice corrispondente è ora:
MultipleListPlot[{Neanderthal2,Moderno2},PlotStyle→{Blue,Red},PlotJoined→Tru
e,
SymbolShape→None,AxesLabel→{"Anni","Pop."},PlotLabel→" Neanderthal:
blu; Moderno: rosso"]
XXI
Alessandro Tomasi
LOVE AFFAIRS
INTRODUZIONE
Il Liceo Scientifico Statale “G. Galilei”, ha aderito nell’A.S. 2005/2006 al Progetto
Nazionale Lauree Scientifiche per la matematica, di cui codesta istituzione è Scuola
Polo per la provincia di Rovigo; l’attività è promossa dal MIUR, Ufficio Scolastico
Regionale del Veneto e dall’Università degli studi di Padova. All’interno del nostro
laboratorio di matematica per il Progetto Lauree Scientifiche, che si è svolto in cinque
incontri, abbiamo avuto la possibilità di analizzare esempi di sistemi dinamici, di
dinamica deterministica e caotica. In particolare, abbiamo discusso alcuni sistemi che
attraverso una descrizione matematica della realtà permettevano di conoscere in anticipo
l’evoluzione temporale dei sistemi stessi, noti i loro stati iniziali. Le nostre esperienze
sono state realizzate attraverso l’uso del calcolatore e del software Mathematica 5.2.
Un sistema dinamico è una funzione che ha un certo modo di comportarsi, una sua
“condotta” (dall’inglese “attitude”). I suoi principali elementi sono essenzialmente due:
a) Un vettore di stato che descrive completamente lo stato del sistema.
b) Una funzione, cioè una legge, che ci dica, dato lo stato del sistema in un certo
istante, quale sarà lo stato del sistema negli istanti di tempo successivi.
Più in generale, un sistema dinamico è una successione di eventi che ammette una
descrizione: una palla che rotola, un satellite che gira intorno alla terra, l’acqua che
scorre lungo un fiume. In linguaggio matematico, l’insieme degli eventi che possono
succedere si chiama spazio delle configurazioni Q, l’evento che si sta verificando si
chiama configurazione ed è un punto x di Q. Un sistema dinamico è una legge che
muove i punti di Q. Generalmente, i sistemi dinamici sono continui: il tempo fluisce in
modo continuo e le evoluzioni sono curve nello spazio.
Noi ci siamo occupati di sistemi dinamici discreti: la configurazione viene osservata
come se scattassimo istantanee al sistema ogni secondo. L’applicazione che, ad x0
(fotogramma 0) associa x1 (fotogramma 1) è una funzione f di Q in Q. In matematica f
si chiama funzione, o mappa. Quindi: la legge di evoluzione che regola il sistema
Q. Se x0 è una configurazione al tempo 0 allora f ( x0 ) =
dinamico è una mappa f : Q →→
x1 è la configurazione al tempo 1. Studiare il sistema dinamico vuol dire determinare gli
eventi futuri. Le mappe f potranno dipendere da parametri (agenti esterni come
variazioni stagionali…).
Nei nostri incontri abbiamo più precisamente trattato:
- dinamica delle popolazioni: abbiamo analizzato il modello Maltusiano e quello di
Verlhust, che trattano una sola popolazione. La legge f è una mappa di R in R dove un
numero reale è la popolazione ad un certo istante. Dato che le popolazioni non sono mai
isolate, abbiamo studiato anche i modelli di interazione tra popolazioni;
- mappa logistica: abbiamo preso il modello di Verlhust e agendo sui parametri,
abbiamo visto quanto si complica la situazione e si arriva al caos.
XXIII
Per poter studiare più agevolmente i sistemi dinamici l’ingrediente principale sono delle
configurazioni speciali: quelle di equilibrio. Una configurazione è di equilibrio se
f(x)=x. Se ci si trova in quella configurazione non ci si muove più. Gli equilibri possono
essere instabili, stabili od attrattivi. Se l’equilibrio è stabile si capisce cosa succederà
(dinamica delle popolazioni), se l’equilibrio è instabile si genera il caos.
Ciò che collega tutte queste nozioni, apparentemente molto diverse tra loro, è l’idea di
evoluzione temporale di un sistema e proprio per questo ho avuto l’occasione di
concentrare la mia attenzione su un particolare tipo di sistema lineare: il modello per le
dinamiche delle “relazioni amorose” (dall’inglese “love affairs”). Prima di affrontare
questo modello è utile una breve introduzione sui sistemi lineari.
SISTEMI LINEARI
Generalmente un sistema lineare in due dimensioni è un sistema nella forma:
x = ax + by ,
y = cx + dy ,
dove a ,b, c, d sono parametri. Ricordando il prodotto di una matrice per un vettore, il
sistema può essere scritto nella forma più compatta
x = A x ,
dove
⎛a b⎞
⎜
⎟
⎝c d⎠
A=
⎛ x⎞
ed x = ⎜ ⎟ .
⎝ y⎠
Così un sistema è lineare se x1 e x2 sono soluzioni e lo sono anche qualsiasi
combinazione lineare c1 x1 + c2 x2 . Osserviamo che x = 0 quando x = 0 , così x * = 0 è
sempre un punto fisso per ogni scelta di A. Le soluzioni di x = A x possono essere
⎛ x⎞
visualizzate come traiettorie che si muovono sul piano ⎜ ⎟ , chiamato piano di fase.
⎝ y⎠
Spieghiamo ora come trovare gli autovalori e gli autovettori.
Gli autovalori di una matrice A sono dati dall’equazione caratteristica det(A-λI)=0 ,
dove I è la matrice identità. Per una matrice 2 x 2:
A=
a
b
c
d
L’equazione caratteristica diventa:
det
a −λ
c
b
=0.
d −λ
XXIV
Espandendo i prodotti dei determinanti:
λ 2 − τλ + ∆ = 0
(1)
dove
τ = traccia(A) = a + d ,
∆ = det(A) = ad – bc ;
si ha inoltre:
λ1 =
τ + τ 2 − 4∆
2
,
λ2 =
τ − τ 2 − 4∆
2
.
(2)
Questi sono le soluzioni dell’equazione quadratica (1). In altre parole, gli autovalori
dipendono solo dalla traccia e dal determinante della matrice A.
La situazione tipica è, per gli autovalori, di essere distinti: λ 1 ≠ λ 2 . In questo caso, un
teorema dell’algebra lineare garantisce che i corrispondenti autovettori v 1 e v 2 sono
linearmente indipendenti e perciò descrivono tutto il piano (Figura 1). In particolare,
ogni condizione iniziale x 0 può essere scritta come una combinazione lineare di
autovettori: x 0 = c1v1 + c2 v2 .
Figura 1
XXV
CLASSIFICAZIONE DEI PUNTI FISSI
Ecco il tipo e la stabilità di tutti i differenti punti fissi in un singolo diagramma:
Verde: nodi instabili.
Azzurro: spirali instabili.
Viola: spirali stabili.
Giallo: nodi stabili.
Figura 2
Gli assi sono la traccia τ e il determinante ∆ della matrice A . Tutte le informazioni del
diagramma sono contenute nelle seguenti formule:
1
2
λ 1, 2 = (τ ± τ 2 − 4∆) ,
∆ = λ 1λ 2 ,
τ = λ1 + λ 2
La prima equazione è la (2). La seconda e la terza possono essere ottenute scrivendo
l’equazione caratteristica nella forma ( λ − λ 1 )( λ − λ 2 ) = λ 2 −τλ + ∆ = 0 . Riguardo la
Figura 2 possiamo fare le seguenti osservazioni:
- Se ∆ < 0 , gli autovalori sono reali e hanno segni opposti; perciò il punto fisso è un
punto sella.
- Se ∆ > 0 , gli autovalori sono o reali con lo stesso segno (nodi), o complessi coniugati
(spirali e centri). I nodi soddisfano al vincolo τ 2 −4∆ > 0 e le spirali soddisfano invece
alla condizione τ 2 − 4∆ < 0.
La parabola τ 2 −4∆ = 0 è la linea di confine tra i nodi e le spirali; i nodi stella e i nodi
degeneri giacciono su questa parabola. La stabilità dei nodi e delle spirali è determinata
da τ .
Quando τ < 0, entrambi gli autovalori hanno parti negative reali, cosi il punto fisso è
stabile. Nodi e spirali instabili hanno τ > 0 . I centri stabili si trovano sulla linea τ = 0 ,
dove gli autovalori sono puramente immaginari.
- Se ∆ = 0 , almeno uno degli autovalori è zero. Quindi l’origine non è punto fisso
isolato.
C’è anche un’intera linea di punti fissi, come la Figura 3, oppure un piano di punti fissi,
se A = 0 . La Figura 2 mostra i punti di sella, i nodi, e le spirali che sono i più importanti
tipi di punti fissi essi si trovano nella regione aperta del piano (∆,τ ) .
XXVI
Centri, stelle, nodi degeneri e punti fissi non isolati sono casi borderline che si trovano
lungo le curve nel piano (∆,τ ) .
Figura 3
Affari di cuore
La storia seguente illustra l’idea di un modello per le dinamiche delle relazioni
amorose, per l’appunto “love affaires” (Strogatz 1988).
Romeo è innamorato di Giulietta, ma nella nostra versione della storia, Giulietta è una
fidanzata incostante. Più Romeo la ama, più Giulietta vuole scappare e nascondersi. Ma
quando Romeo si scoraggia e ci ripensa, Giulietta comincia a trovare Romeo
stranamente attraente. Romeo, d’altro lato, si comporta in modo a lei simile: diviene
focoso quando lei lo ama, si raffredda quando lei lo odia.
Assegniamo:
R(t) = l’amore/odio di Romeo per Giulietta al tempo t
J(t) = l’amore/odio di Giulietta per Romeo al tempo t .
Valori positivi di R e J significano amore, valori negativi significano odio. Quindi il
modello per il loro romanzo trasversale è:
.
R=aJ
.
J =−bR
dove i parametri a e b sono positivi, per essere coerenti con la storia.
Il triste risultato della loro relazione è, ovviamente, un ciclo infinito di amore e odio; il
sistema dinamico che governa la situazione ha un centro in (R,J) = (0,0). Alla fine,
Romeo e Giulietta riescono ad ottenere l’amore simultaneamente per un quarto del
tempo (Figura 4).
Figura 4
XXVII
Adesso consideriamo le previsioni per gli innamorati governate del sistema lineare
generale:
.
R=aR+bJ
.
J=cR+dJ
dove i parametri a, b, c, d possono avere entrambi i segni. Una scelta dei segni specifica
gli stili romantici. Come è stata chiamata da uno studente di Strogatz, la scelta a > 0 , b
> 0 significa che Romeo è un “amante appassionato” (“eager beaver”), poiché egli si
emoziona per l’amore di Giulietta per lui, ed è inoltre stimolato dai suoi sentimenti
affettuosi per lei. È divertente assegnare un nome agli altri tre stili romantici e predire
gli esiti per la varie coppie. Per esempio, può un “cauto innamorato” (“cautious lover”)
(a < 0, b > 0) trovare un vero amore con un amante innamorato ?
Che cosa succede quando due identici “cauti innamorati” si mettono assieme ?
Soluzione: Il sistema è:
.
R = aR + bJ
.
J = bR + aJ
con a < 0 , b > 0 . Qui a è una misura di prudenza (entrambi cercano di evitare di
scaraventarsi l’uno sull’altra) e b è una misura di istintività (entrambi sono eccitati dalle
avances dell’altro).
Ci aspettiamo che l’esito dipenda dal peso relativo di a e b . Osserviamo che cosa
accade.
La matrice corrispondente è.
A=
a b
b a
che ha
τ = 2a < 0 ,
∆ = a 2 −b2 ,
τ 2 − 4∆ = 4b 2 > 0
Da questo momento, il punto fisso (R,J) = (0,0) è un punto di sella se a 2 < b 2 e un
punto stabile se a 2 > b 2 . Gli autovalori e i corrispondenti autovettori sono:
λ1 = a + b ,
λ 2 = a −b ,
v1 = (1,1)T ,
dove con T indico il trasposto del vettore (riga).
v2 = (1, −1)T ,
Dal momento che a + b > a – b , l’autovettore (1,1) , misura la varietà instabile quando
l’origine è un punto di sella. La figura 5 mostra il ritratto di fase per i due casi.
XXVIII
Figura 5
Se a 2 > b 2 , la relazione giunge sempre a conclusione con una reciproca indifferenza. La
lezione sembra essere che l’eccessiva cautela possa portare all’apatia.
Se a 2 < b 2 , gli innamorati sono più temerari, o forse più sensibili l’uno con l’altra.
In questo modo la relazione è esplosiva. A seconda dei loro sentimenti iniziali, la loro
relazione diventa o una festa d’amore, oppure una guerra. In entrambi i casi, tutte le
traiettorie si avvicinano alla linea R = J , così alla fine i loro sentimenti divengono
reciprocamente ricambiati.
XXIX
Progetto Lauree Scientifiche
Relazione di:
Barbuiani Marco, Frigato Mauro, Marzolla Alberto
Un sistema dinamico è un modello matematico di una situazione che
cambia, si muove (come espresso dalla parola dinamica, di origine greca).
Può trattarsi del moto orbitale della Terra, come del movimento di un
congegno meccanico. È sempre difficile introdurre un corso di matematica,
perché non si possono descrivere i contenuti senza fare uso di definizioni e
risultati che saranno spiegati in seguito. Noi vogliamo introdurre la nozione
più generale di sistema dinamico, senza presupporre le definizioni
dettagliate dei singoli casi; non sarà possibile dare le definizioni complete
di alcuni tipi di sistema dinamico (per esempio integrabile, conservativo)
che presuppongono altre nozioni.
Nel nostro percorso ci hanno aiutati e coordinati i prof. G. Valente, B.
Napolitano e M. Nicoli, supportati anche dall’aiuto di due docenti del
Dipartimento di Matematica Pura ed Applicata dell’università degli studi di
Padova, i prof. A. Giacobbe e O. Bernardi, che con la loro esperienza ci
hanno aiutato a fare nostri questi concetti.
Successivamente il gruppo formato da 25 persone all’incirca è stato
suddiviso in due sottogruppi, uno dei quali, lavorando con le calcolatrici
Texas TI-89, si è occupato dell’aspetto teorico di questi sistemi, mentre
l’altro, con l’aiuto dei computer, si è occupato dell’utilizzo del programma
di informatica Mathematica.
Nell’ultima fase del lavoro i due sottogruppi si sono riuniti, e attraverso la
loro fattiva collaborazione, si è giunti alla realizzazione di un lavoro
completo e ben organizzato.
XXXI
Questo è un resoconto degli apprendimenti teorici, basilari e necessari per
una miglior comprensione dei risultati ottenuti che altrimenti non avremmo
potuto interpretare al meglio comprendendoli a pieno.
Si è proceduti per gradi, partendo dalla nozione di successione e così via,
per riuscire a raggiungere il nostro obiettivo: la comprensione e
l’elaborazione dei grafici a ragnatela.
Si definisce successione una funzione o applicazione definita in un
sottoinsieme S dei numeri naturali N che ha valori in R:
ƒ: S N Æ R
n Æ ƒ(n) = an
essa viene definita come una funzione che ha per dominio un sottoinsieme
dei numeri reali e da un punto di vista grafico può essere rappresentata in
un piano cartesiano nel quale i punti hanno coordinate (n;an).
Ad esempio:
NÆR
N Æ an =n2
0Æ0
1Æ1
2Æ4
…
…
…
Y
.
2
1
.
0
1
2
x
E’ possibile descrivere una o più grandezze (sistema) che evolvono (un
sistema dinamico) a passi costanti della variabile temporale (un sistema
dinamico discreto) tramite una speciale legge ricorsiva.
a0 è assegnato
an+1 =ƒ (an)
a1 = ƒ (a0)
viene definita successione ricorsiva
è possibile conoscere ogni elemento della
successione sulla base della conoscenza
dell’elemento precedente
a2 = ƒ (a1)
a3 = ƒ (a3)
La formula che definisce il termine ennesimo nota la condizione iniziale x0
in una successione definita per ricorrenza è:
XXXII
xt = at x0
Si definisce sistema dinamico discreto del primo ordine una funzione del
tipo:
xt+1 = ƒ (xt)
Detta equazione alle differenze, dove:
t = 0,1,2,…
xt è una successione definita per ricorrenza mediante la funzione
generatrice ƒ
Una soluzione di un’equazione alle differenze è una successione di x, che
soddisfa, per ogni t ≥ 0, l’equazione alle differenze stessa.
Si definisce invece sistema dinamico discreto lineare una funzione
caratterizzata da una equazione alle differenze del tipo:
xt+1 = axt , con a ≠ 0
Il modello di Malthus è un esempio di sistema dinamico discreto lineare, il
quale è particolarmente utilizzato nello studio delle popolazioni.
Definiamo:
x0 la popolazione iniziale, con n il tasso di natalità e con m il tasso di
mortalità; possiamo notare che in assenza di fattori esterni:
xt+1 = xt + nxt - mxt
xt+1 = (1+n-m)xt
xt+1 = axt , con a = 1+n-m
• Se 0<a<1,cioè n<m, la popolazione si estinguerà esponenzialmente
• Se a >1,cioè n>m, la popolazione aumenta esponenzialmente
Un sistema dinamico discreto lineare affine è invece caratterizzato da
un’equazione alle differenze del tipo:
xt+1 = axt + b
Tra le infinite soluzioni esiste una e una sola soluzione che sia costante; in
questo caso l’equazione diventa
xt+1 = xt
XXXIII
quindi
x = ax + b
da cui
x = b / (1 – a)
Se si parte da tale valore, il sistema dinamico non evolve ma è stazionario.
Se a = 1
xt+1 =axt + b
xt+1 = xt + b , con b > 0
xt+1 = xt , per ogni t ≥ 0
xt + b = xt
in questo caso non ci sono punti di equilibrio.
Vogliamo ora dimostrare la stabilità di un punto di equilibrio:
xt = at (x0 – b/ (1 –a)) + b/ (1- a)
xt+1 = axt + b
x0 condizione iniziale
x1 = ax0 + b
x2 = ax1 + b = a (ax0 +b) + b
= a2x0 + a2b + ab + b
xt = atx0 + b (at – 1 + … + 1)
= atx0 + b/ (1 - a) – b/ (1 - a)
= at (x0 – b/ (1 - a)) + b/ (1 – a)
posto E = b/ (1 - a):
xt = at (x0 – E ) + E
• Se x0 = E la soluzione è una successione di valore costante
• Se a è compreso tra -1 e 1,allora at tende a 0 e il sistema converge a
E,comunque si fissi la condizione iniziale in questo caso si dice che
E è un punto di equilibrio stabile (oppure che è attrattore), perché
attrae successioni il cui valore iniziale è diverso da x0 = E. In questo
caso E è un attrattore globale, nel senso che qualunque sia la
condizione iniziale del sistema, il sistema evolve convergendo ad E
Se a > 1, il sistema volge esponenzialmente. Il punto di equilibrio si dice
instabile; se si parte da E il sistema rimane fermo, ma se vi è una piccola
perturbazione alla condizione iniziale vi è poi una catastrofe.
XXXIV
Successivamente abbiamo ritenuto importante soffermarci su un altro
concetto secondo noi importante, legato al concetto di caos incontrato nello
studio della dinamica dell’evoluzione di popolazioni. Di seguito se ne
riporta un piccolo resoconto.
Effetto farfalla
I fisici amano pensare che tutto ciò che si deve fare è dire:
“Queste sono le condizioni; e ora,che cosa accadrà subito dopo?”
Richard P.Feyman
La meteorologia fu probabilmente il campo in cui si svilupparono
inizialmente le prime e rudimentali idee a proposito del concetto di caos.
Edward Lorenz, studioso al M.I.T. (Massachussets Institute of Tecnology),
osservava le più diverse condizioni ambientali mutare continuamente,
senza riuscire comunque a seguirne o meglio anticiparne l’evoluzione
tramite l’ausilio del suo computer, un Royal McBee, e dei suoi modelli che
giravano dentro quell’insieme di circuiti e valvole elettroniche,
ingombrante quanto una stanza e rumorosissimo, e come se non bastasse
tanto delicato da rompersi quasi ogni settimana. Ma il limite più grande
probabilmente era la carenza di velocità e di memoria sufficienti per fornire
una simulazione realistica del comportamento dell’atmosfera e degli
oceani.
Tuttavia riuscì ad elaborare un modello composto di dodici equazioni che
descrivevano i rapporti tra pressione temperatura e velocità del vento, poco
realistico e troppo idealizzato, ma non ripetitivo: gli eventi potevano essere
descritti con scrupolosità matematica, ma non si ripetevano mai due volte
uguali.
Lorenz comprese che l’essenziale non erano le statistiche, come massime e
minime delle temperature, ma piuttosto il modo in cui le configurazioni
atmosferiche mutavano nel corso del tempo; e realizzò questo con l’aiuto
del Royal McBee, rappresentante di quell’ “universo macchina” di cui
Lorenz era il “dio”.
Gli scienziati erano concordi nel dire che le condizioni meteorologiche
erano decisamente più complicate di altri campi come lo studio dei moti dei
corpi celesti, nonostante fossero governate dalle stesse leggi. Forse un
computer più potente avrebbe potuto svolgere dunque il ruolo
dell’intelligenza suprema immaginata dal filosofo matematico
settecentesco Laplace.
Lorenz riuscì ad ottenere risultati sempre migliori con la sua opera di
programmazione e con l’evoluzione tecnologica dei computer: otteneva
modelli dalle caratteristiche sempre più ”terrestri”, sebbene ancora non
potessero essere assimilati alle reali condizioni. Il pregio di quei modelli
XXXV
era prevedere cambiamenti verosimili e di contenere l’imprevedibilità:
quando lo scienziato si accorse che immettendo quasi gli stessi dati iniziali
il proprio modello produceva grafici metrologici sempre più diversi mano a
mano che si allontanavano dall’istante iniziale pensò che ci fosse qualcosa
di sbagliato nel suo modello, ma si rese conto che quella scoperta aveva
qualcosa di enormemente importante che i suoi colleghi avrebbero
compreso più tardi. Benché le sue equazioni fossero parodie grossolane
della meteorologia terrestre, egli credeva che cogliessero l’essenza
dell’atmosfera reale. Da quel momento decise che la previsione
meteorologica a lungo termine fosse impossibile.
Tuttavia in quegli anni la scienza, trasportata da grande ottimismo si lanciò
verso imprese inverosimili dando per scontate cose assolutamente
imprevedibili.
Von Neumann notò che i sistemi dinamici complicati avevano punti di
instabilità. Da questo dedusse erroneamente di poter stimolare questi punti
critici del sistema dinamico “atmosfera”, pilotando in un certo senso il
tempo. Anche alcune commissioni di scienziati tentarono di perseguire
questo suo scopo, almeno per quanto riguarda la parte della predizione. Ciò
che indusse tutti in errore era la convinzione che solamente alcuni punti
fossero instabili, ignorando la condizione di caos, ossia l’instabilità di ogni
punto.
In quegli anni la creazione di modelli per mezzo di computer era riuscita a
trasformare la previsione del tempo da arte a scienza. Tuttavia le predizioni
al di là di due o tre giorni erano mere speculazioni, quelle di sei o sette
giorni pressoché inutili. Perché dunque accadeva questo? Ebbene la
risposta sta proprio nell’effetto farfalla. Ossia per piccoli fenomeni
meteorologici ogni previsione si deteriora rapidamente. Errori incertezze e
piccole imprecisioni si moltiplicano a cascata attraverso una catena di
elementi di turbolenza dai più piccoli ai più grandi, provocando una
catastrofe nel sistema, che raggiunge il caos. Anche le moderne previsioni
presentano in linea teorica gli stessi limiti anche se ora meno importanti,
tant’è vero che nemmeno oggi con satelliti e sensori terrestri saremmo in
grado di predire con assoluta esattezza i mutamenti dal momento che per
noi sarebbe impossibile anche la semplice rilevazione dei dati in modo
perfetto: e questo porta come già spiegato alla moltiplicazione delle
incertezze per l’effetto farfalla e a situazioni verosimili ma non certe. Per
questo motivo questo effetto è conosciuto più precisamente con il nome
tecnico di “dipendenza sensibile dalle condizioni iniziali”.
XXXVI
Una strofa molto semplice, quasi una sorta di filastrocca facente del
folklore è molto esemplificativa del concetto sopra citato:
Per colpa di un chiodo si perse lo zoccolo;
per colpa di uno zoccolo si perse il cavallo;
per colpa di un cavallo si perse il cavaliere;
per colpa di un cavaliere si perse la battaglia;
per colpa di una battaglia si perse il regno!
Furono utilizzati vari modelli, anche meccanici, per tentare di studiare le
situazioni in cui poteva crearsi il caos a causa dell’effetto farfalla, tra cui
uno per l’osservazione della convezione dei fluidi, ed una ruota meccanica
mossa dalla caduta di acqua.
Nel primo il fluido analizzato seguiva un determinato movimento circolare
generato dal calore trasferito dal basso verso l’alto; nel momento in cui
però il fluido veniva riscaldato maggiormente aveva inizio un’instabilità
originando un’oscillazione che procedeva avanti e indietro lungo le celle.
Con un calore ancora più elevato il sistema diveniva irregolare e
turbolento.
Il secondo invece era la famosa ruota di Lorenz, il primo vero e proprio
sistema caotico scoperto dallo studioso. Esso è costituito da una ruota con
agganciati dei secchi con un piccolo forellino sul fondo. Analogamente al
sistema precedente – si noti l’analogia tra la ruota e i moti circolari e tra
calore e quantità d’acqua, tra il primo e il secondo modello – il moto è
sorprendentemente complicato: richiede una certa quantità minima di
spinta per superare l’attrito e mettersi in moto (prima era necessario un
calore minimo per superare la viscosità), e la caduta dell’acqua costante
non porta, come ci si aspetta, ad una stabilizzazione a lungo andare.
Infatti se la caduta del liquido è veloce la rotazione diviene caotica, a causa
degli effetti non lineari intrinseci del sistema. Inoltre, i secchi, passando
sotto l’acqua si riempiono a seconda della velocità con cui si muove la
ruota (allo stesso modo un fluido che circola velocemente ha poco tempo
per assorbire calore). Di fronte a tutto questo Lorenz pervenne ad una
conclusione diversa da quella di un comune fisico che avesse presupposto
un flusso d’acqua regolare: egli anziché immaginare una condizione
stazionaria, inserì nel suo computer tre equazioni, con tre variabili che
descrivevano completamente il moto del sistema. Il computer stampò le
terne dei valori mutevoli delle tre variabili. Immaginando di identificare i
valori di ciascuna terna come le coordinate spaziali di punti, ottenne una
figura tridimensionale che divenne in seguito famosissima con il nome di
“attrattore d Lorenz”.
XXXVII
Questa sorta di doppia spirale consiste nel luogo dei punti identificati da
quelle terne di valori. Si ripete all’infinito, in traiettorie anche molto simili
ma mai due volte identiche. Era la prima vera rappresentazione grafica del
caos di un sistema. Proprio da questa forma simile alle ali di una farfalla
derivò il nome di questo fenomeno. Alcuni associarono questa
rappresentazione anche alla mascherina di un barbagianni.
Sarebbe bello poter approfondire ulteriormente l’argomento con altre
nozioni riguardo la storia della scienza che ha portato all’intuizione
dell’effetto farfalla, riguardo l’effetto farfalla stesso ed il concetto di caos
ma probabilmente i nostri strumenti non sono ancora così progrediti per
tale scopo. Il nostro intento in questo nostro “percorso” è stato quello di
esporre quelle che sono state le notizie e le nozioni più interessanti apprese
a seguito della lettura consigliata dal prof. G. Valente: un saggio di James
Gleick concernente questi e molti altri argomenti concatenati alle
medesime tematiche.
XXXVIII
“Progetto Nazionale Lauree Scientifiche”
Relazione di Luca Cisotto
Il Liceo Scientifico Galileo Galilei di Adria è stato scelto come polo per il Progetto
Nazionale Lauree Scientifiche nel campo della matematica.
Tale progetto, sostenuto dall’Università degli Studi di Padova, aveva innanzitutto il
desiderio di avvicinare gli studenti interessati alla Facoltà di Scienze della suddetta
Università ed inoltre lo scopo di riuscire a far conoscere agli alunni uno studio della
Matematica partendo da un approccio pratico invece di seguire la procedura “standard”
delle normali lezioni, che prevede un fondamento teorico per una successiva fase di
applicazione.
Grazie al contributo di due professori provenienti da Padova, il dottor Giacobbe e la
dottoressa Bernardi e dei nostri insegnanti è stato per noi possibile avvicinarsi ai sistemi
dinamici in modo curioso e divertente, e conoscere le equazioni logistiche che
descrivono l’evoluzioni di sistemi e popolazioni fra loro interagenti e non.
Inizialmente è stato fatto un lavoro divulgativo in cui agli studenti veniva fatta una
presentazione teorica dell’argomento per essere divisi poi in due gruppi: uno di questi
affrontava lo studio da un punto di vista maggiormente teorico e l’altro svolgeva calcoli
al computer tramite il programma “Mathematica” grazie al quale era possibile
rappresentare l’iterazione di due popolazioni per notare come degeneravano o
crescevano, procedendo man mano allo studio di fenomeni maggiormente complessi.
•
Crescita delle cellule tumorali e applicazione all’epilessia
Personalmente, ritengo che gli incontri effettuati siano stati molto interessanti e per
questo ho deciso di approfondire una tematica molto attuale sfruttando le conoscenze
apprese: lo sviluppo delle cellule tumorali, argomento che fu affrontato nel 1994 dagli
scienziati Cross e Cotton.
Essi intendevano descrivere queste cellule partendo dall’equazione di evoluzione:
Nt+1 = r Nt (1-Nt / k)
r > 0, k > 0,
dove “r” è il coefficiente di accrescimento mentre “k” definito coefficiente logistico,
venne da loro posto =1. La scelta della normalizzazione di Nt ad 1 significa che Nt deve
essere interpretato come la frazione di cellule della popolazione totale che possono
essere mantenute nella cultura.
Inoltre, gli studi fatti ci consentono di sapere che per r < 3 la popolazione Nt aumenta
fino a raggiungere una situazione stabile data da ( r-1 ) / r, tale fatto è ben visibile nella
figura 1 sottostante:
XXXIX
0.6
0.5
0.4
0.3
0.2
0
10
20
30
40
50
Per valori di r > 3 il grafico cambia in modo significativo ed appaiono soluzioni
periodiche dando origine al caos per r > rc ( r critico). Quando il parametro “r”, che
ricordiamo essere l’indice di crescita delle cellule tumorali, si trova nel regime caotico,
la popolazione di cellule, ad un qualsiasi istante t, dipenderebbe criticamente dalle
condizioni iniziali.
Nella figura 2 qui sotto, Nt si avvicina alla soluzione periodica ma nei primi periodi
esibisce una curva di crescita pressoché sigmoidea.
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0
10
20
30
40
50
Supponendo che il ritmo di crescita di tali cellule sia differente, ma che in tutte sia tale
da essere r > rc, esse mostrano un comportamento caotico; un notevole interesse dal
punto di vista dello studio patologico è nella dimensione totale del tumore, cioè nel
numero di cellule.
Cross e Cotton considerarono inizialmente 5 cloni e sommarono le loro popolazioni per
ottenere la popolazione totale, un esempio di quanto detto è dato da questo grafico:
XL
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0
10
20
30
40
50
In tale rappresentazione iniziamo a vedere l’inizio di una sorta di “appiattimento” del
comportamento caotico e il tentativo di apparizione di un regime simile a quello in
figura 1
Quest’ultimo effetto è ancora più chiaro se si esaminano 400 cloni, come possiamo
vedere dal grafico esso è ancora più evidente:
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0
10
20
30
40
50
Le clonazioni multiple sono molto comuni nella crescita dei tumori e gli esempi
precedenti ci hanno dimostrato come queste possano oscurare un comportamento di tipo
caotico, tuttavia è bene ricordare che nella dimostrazione di questi abbiamo considerato
valori alquanto insoliti come ad esempio una crescita del parametro “ r “ costante per
tutto il tempo di osservazione.
XLI
In effetti lo studio di modelli di crescita in cui il coefficiente di accrescimento non sia
costante sarebbe molto complicato in quanto, essendoci una struttura di età diversa, ogni
clone avrebbe un regime di crescita caotico.
La crescita delle cellule tumorali è solamente uno degli esempi di regime caotico, infatti
molti processi biologici sono di questo tipo, anche l’epilessia (patologia cronica del
sistema nervoso caratterizzata da crisi convulsive ricorrenti, nei quali gli attacchi
possono essere dovuti a un danno cerebrale provocato da differenti tipologie di traumi)
per esempio si comporta con uno sviluppo non determinato; un aspetto rilevante
consiste nel fatto che in molti sistemi caotici vi siano delle esatte intermittenze fra
regioni di caos e regioni ordinate, come mostrato in figura:
Questi sono iterazioni asintotiche per l’equazione discreta xt+1 = xt + r xt (1-xt) con 1,9 <
r < 3, e nella biforcazioni ottenute, è possibile vedere questa alternanza fra modello
deterministico e caotico, rilevando inoltre anche alcune inaspettate proprietà di
autosimilarità della stessa.
Alcuni scienziati hanno ipotizzato che l’epilessia possa essere un esempio di caos, con
tali considerazioni un ulteriore e più attenta analisi dell’elettroencefalogramma ha
fornito nuovi sviluppi all’interno del processo genetico epilettico, con un uso possibile
nella diagnosi e nel trattamento dell’epilessia.
Interessanti studi relativi al ruolo del caos nell’attività del nostro cervello dimostrano
come in condizioni di benessere il nostro sistema fisiologico si comporta in realtà con
un regime imprevedibile, questo perché il comportamento caotico consente dei vantaggi
funzionali e una maggiore flessibilità di quelli periodici e questo permetterebbe
all’organismo sano di rispondere ai diversi stimoli esterni senza subire danni.
In particolare, gli scienziati Iasemidis e Sackellares studiarono un migliaio di neuroni
che interconnettono e sottoposero il sistema di equazioni alla perturbazione per cercare
di capire come avvengono le comunicazioni fra parti del cervello ad andamento regolare
e caotico, quindi fra malato e sano, il loro scopo era quello di utilizzare i risultati per
cercare di curare i pazienti con parziali convulsioni.
Abbiamo visto come il caos influenzi molto la nostra vita anche in fatti del tutto
impensabili, non solo per quanto riguarda la crescita e lo sviluppo di popolazioni.
Lo studio di questi fenomeni è stato molto stimolante poiché sinceramente non pensavo
che la matematica potesse avere delle applicazioni così svariate e differenti, e sono
molto contento di aver avuto la possibilità di approfondire questi studi.
XLII
Liceo Scientifico Galileo Galilei, Adria
di
Giada Lunardi, Andrea Zerbin, Isidoro Ragaglia, Marco Girardi
Questo progetto è rivolto ai ragazzi del triennio per avvicinarli alle Facoltà
scientifiche. Nell’anno scolastico 2005/2006 il tema trattato in una serie di
cinque incontri (per un totale di quindici ore) è stato quello riguardante i
sistemi dinamici. Grazie all’aiuto di docenti interni all’istituto e al
contributo di due docenti universitari, si sono affrontate problematiche sia
relative all’aspetto teorico sia riguardanti l’utilizzo di un software, nel
nostro caso “Mathematica”.
Durante la prima lezione il gruppo degli alunni che partecipavano al
progetto si è diviso: una parte ha seguito una lezione prettamente teorica,
l’altra ha iniziato ad acquisire le informazioni di base per l’utilizzo del
Mathematica.
Nella lezione teorica, si sono date le definizioni di successione, ottenuta
anche con metodo ricorsivo, e di sistema dinamico, lineare e affine.
Nel frattempo, il gruppo che utilizzava il Mathematica cominciava lo
studio di popolazioni.
Nelle lezioni successive, i due gruppi si sono uniti, comunicandosi
vicendevolmente le competenze acquisite. Si sono viste varie tipologie di
grafici, tra cui il diagramma a ragnatela. Questo evidenzia la presenza di un
punto di equilibrio, che può fungere o da attrattore o da repulsore del
sistema.
In particolar modo, noi ci siamo interessati alla curva di Feigenbaum,
mediante le cui biforcazioni si evidenziano facilmente i raddoppiamenti del
periodo.
È interessante notare come per valori di k maggiori di 3.58, il sistema
degeneri nel caos.
XLIII
L’applicazione logistica ha la forma:
x 6 k x(1-x)
Tale funzione è definita per valori di x compresi tra 0 e 1 e per valori di k
compresi tra 0 e 4.
Fra i molti caratteri di questa applicazione, quella che ci interessa è la
cascata dei raddoppiamenti di periodo.
La rappresentazione grafica di tale funzione è una curva, il cui nome è
“fico”, in onore di Feigenbaum (in tedesco “albero di fico”).
Il vero e proprio grafico del fico compare per valori del parametro k
compresi tra 3 e 4: per tali valori infatti, la curva inizia a presentare dei
punti di biforcazione, al seguito dei quali la curva inizia a presentare 2
diramazioni per ogni punto.
Rappresentazione grafica della curva di Feigenbaum dove, per valori di k
uguali a 3 e 3.5, si ottengono le prime due biforcazioni.
XLIV
Un esempio di soluzione aperiodica dell’equazione logistica per k = 3.9.
Il diagramma riporta in ordinate i valori di x e in ascisse il tempo.
Se ingrandiamo il grafico nello spazio corrispondente ai valori di k
compresi tra 3.5 e 4, otteniamo delle copie approssimate dell’intero fico. Se
scegliamo pezzi sempre più piccoli e li ingrandiamo l’immagine che ci
risulta può stabilizzarsi, nel senso che versioni successive cominciano ad
apparire quasi identiche. Questo processo è la rinormalizzazione del
sistema. Ogni proprietà nella geometria infinitesimale dell’originale può
essere ritrovata nella geometria finita dell’oggetto rinormalizzato. Il
rapporto di scala tra una biforcazione e l’altra è di 4,6692016090.
L’intuizione di Feigenbaum fu che da qualsiasi applicazione si parta, sia
essa l’applicazione logistica, quella trigonometrica o qualsiasi altra, la
dinamica la porta ad avvicinarsi sempre più all’applicazione omonima.
Così le sue proprietà, che dipendono solo dagli stati avanzati del
procedimento di ingrandimento, vengono ad assomigliare sempre di più a
quelle dell’applicazione di Feigenbaum. Tutto ciò perché in questo sistema
dinamico di applicazione c’è un solo attrattore, cioè il numero
4,6692016090.
XLV
Scaricare