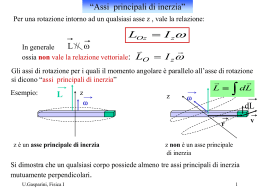
Dinamica dei moti rotatori F ma F Dinamica del punto materiale Asse di rotazione • a dipende dalla forza e dal punto in cui viene applicata (momento di F) • a dipende dalla distribuzione rispetto all’asse di rotazione (momento di inerzia) a 0 a 0 a 0 1 Momento torcente FT Fsen F Agisce sulla rotazione attorno all’asse z. L’accelerazione angolare dipenderà da FT e dalla distanza r. FR F cos rFsen Non ha alcun effetto sulla rotazione 2 Momento torcente r F F [Nm] rFsen 3 Esempio momento forza peso O L m Si determini momento torcente rispetto ad O se m si trova a destra o sinistra. 4 Momento di inerzia La massa è una caratteristica univoca di un corpo. Il momento di inerzia dipende da come è distribuita la massa del corpo rispetto all’asse di rotazione. Massa vicino all’asse di rotazione…minore inerzia …minore resistenza alla rotazione Viceversa massa in media in regioni più lontane dall’asse di rotazione…maggiore inerzia …maggiore resistenza alla rotazione 5 Momento di inerzia di una particella F// asse di rotazione non ha effetto sul moto F T Fsen maT Fsen ma z r rFsen ma z r 2 z mr a z 2 I mr 2 Momento di inerzia z Ia z 6 Momento di inerzia di sistema di particelle F y r1 m 1 T1 Sistema costituito da m1 e m2 libere di ruotare attorno all’asse z. r1 ,r2 e r sbarre di massa trascurabile T1r T2 r m2 T2 r2 T1r T2 r x F1 P T1 T1r F2 T2 T2r Momento torcente z z1 z 2 FT 1 r1 FT 2 r2 7 Momento di inerzia di sistema di particelle z (m1a1T )r1 (m2 a2T )r2 (m1a z r1 )r1 (m2a z r2 )r2 (m r )a z (m2 r 2 )a z 2 1 1 2 (m r m2 r 2 )a z Ia z 2 1 1 2 I m r m2 r Momento di inerzia del sistema I m r m2 r 2 1 1 2 1 1 2 2 n 2 2 .. mi r 2 i i 1 8 Momento di inerzia di sistema di particelle y F r1 m 1 T1 T1r T2 r m2 r2 T2 x z Ia z Momento delle Forze esterne Espressione rotazione della II Legge di Newton. F ma 9 Momento di inerzia dei corpi rigidi n I mi r i 1 2 i Corpo rigido: distribuzione continua di massa, suddivisa in infiniti elementi di massa infinitesima m n I lim mi r m 0 i 1 2 i I r dm 2 10 Tabella Momenti di inerzia 11
Scarica