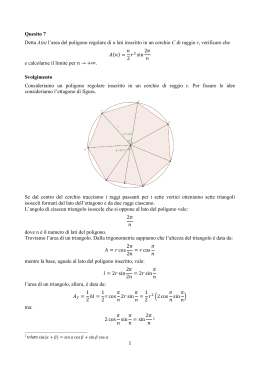
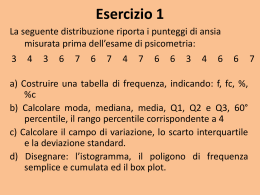
Homework 3 Tiro al Bersaglio Corso di Fondamenti di Informatica II BIAR2 (Ing. Informatica e Automatica) e BSIR2 (Ing. dei Sistemi Informatici) A.A. 2013/2014 Si vuole risolvere con un algoritmo efficiente il seguente problema: dato un bersaglio poligonale convesso, e data una sequenza di punti nel piano, determinare per ciascuno dei punti della sequenza se esso “colpisce” (interseca) il bersaglio, oppure no. Si ricordi che un poligono è detto convesso se il segmento di linea tracciato tra due qualunque suoi punti è interamente contenuto nel poligono stesso. La Figura 1 mostra due poligoni, di cui solo quello a sinistra è convesso. Il poligono convesso sarà fornito in input attraverso la sequenza antioraria dei suoi vertici, a partire dal vertice ad ordinata massima (vedi Figura 2). Figura 1: Il poligono di sinistra è convesso, quello di destra non lo è Un approccio inefficiente. È possibile risolvere il problema in maniera semplice, ma non molto efficiente, attraverso il seguente algoritmo. Sia P il poligono convesso di input, dato secondo la sequenza p0 , p1 , . . . , pN −1 dei suoi vertici, percorsi in senso antiorario e a partire dal vertice con coordinata y massima; per comodità definiamo anche pN := p0 . Osserviamo ora che se q è un qualunque punto contenuto nel poligono, allora tutte le terne ordinate (pi , pi+1 , q) con 0 ≤ i < N saranno ordinate in senso antiorario. Viceversa, se il punto q è al di fuori del poligono, allora esiste una terna (pi , pi+1 , q) 1 2 p0 p1 p4 p2 p3 Figura 2: Rappresentazione standard di un poligono convesso ordinata in senso orario. Si veda la Figura 3 per un’illustrazione. Questo dà luogo al seguente algoritmo: boolean contenutoIn(punto q, poligono P ): Per i = 0, 1, . . . , N − 1: Se (pi , pi+1 , q) è ordinata in senso orario, restituisci false Restituisci true. Decidere se una particolare terna (a, b, c) di punti è ordinata in senso orario oppure no è semplice: è sufficiente calcolare1 il determinante xa ya 1 DET(a, b, c) := det xb yb 1 xc y c 1 Tale determinante è negativo quando la terna è in senso orario, positivo quando la terna è in senso antiorario (e nullo quando i tre punti giacciono su un’unica retta). Ad esempio, se a = (0, 0), b = (1, 0), c = (0, 1) (dove la prima componente di ogni punto indica l’ascissa x e la seconda l’ordinata y), allora DET(a, b, c) = 1, a riprova del fatto che la terna (a, b, c) è orientata in senso antiorario. Si noti che i punti sul bordo del poligono sono considerati parte del poligono. Un algoritmo efficiente. L’algoritmo appena visto ha costo O(N ), dove N è il numero di vertici del poligono, a causa del ciclo principale, che itera su tutti i vertici. Se si volesse verificare l’appartenza o meno di Q punti al poligono, il costo totale sarebbe quindi O(Q · N ). Mostriamo invece come si possa preprocessare il poligono in tempo O(N ) in modo da poter rispondere al problema del contenimento in tempo O(log N ) per punto, per un tempo totale di O(N + Q log N ). 1 Chi disgraziatamente non sapesse calcolare il determinante di una matrice 3 × 3 può consultare http://it.wikipedia.org/wiki/Regola di Sarrus o un qualunque testo di algebra lineare. 3 p4 p4 q q p3 p3 Figura 3: La terna (p3 , p4 , q) è percorsa in senso antiorario nell’esempio a sinistra, e in senso orario nell’esempio a destra Si ricordi che il poligono è descritto in senso antiorario e a partire dal vertice con y massima. Ciò implica che, percorrendo la sequenza dei vertici, le coordinate y dei vertici prima decrescono e poi crescono (Figura 4). p0 p1 p4 p2 p3 Figura 4: Il poligono suddiviso in parte sinistra (y decrescenti, colore rosso) e parte destra (y crescenti, colore blu). In una fase di preprocessamento, determiniamo il vertice più “in basso” del poligono (pB ), dal quale le coordinate y iniziano di nuovo a crescere. Ciò divide il poligono in una parte “sinistra” (coordinate y decrescenti) e una parte “destra” (coordinate y crescenti). Quindi, se il preprocessamento è stato fatto in maniera opportuna, possiamo assumere che i punti del poligono siano stati posti in un array e che si sia determinato un indice B dell’array che stabilisce dove termina la parte sinistra del poligono e dove inizia la parte destra (nell’esempio di Figura 4 si ha B = 3). A questo punto procediamo nel considerare i punti dei quali vogliamo verificare il contenimento nel poligono. Per ciascuno di questi, usiamo il seguente metodo. Sia q il punto da verificare. Ovviamente se la coordinata y di q è maggiore della massima coordinata y del poligono, o minore della minima coordinata y del poligo- 4 no, il punto q è al di fuori del poligono; questa verifica, se implementata in maniera opportuna, può essere effettuata in tempo costante. Nel caso contrario, se immaginiamo di tracciare una linea orizzontale attraverso il punto q, essa intersecherà un lato nella parte sinistra del poligono e un lato nella parte destra (Figura 5). Il punto q è all’interno del poligono se e solo se esso è contenuto tra questi due lati. Ma per il modo in cui il poligono è stato memorizzato, i due lati in questione possono essere trovati in tempo O(log N ) attraverso due ricerche binarie, in quanto le coordinate y in ciascuna parte del poligono sono ordinate. Dopo aver determinato i due lati di interesse, è semplice verificare in tempo costante se il punto q cade tra di essi, usando la primitiva DET discussa precedentemente. p0 p1 p4 q p2 p3 Figura 5: Una linea orizzontale lungo il punto q interseca il poligono in un lato della parte sinistra (lato p1 p2 ) e un lato della parte destra (lato p3 p4 ) Avvertenza importante. Per memorizzare le coordinate dei vertici e dei punti in questo homework è imprescindibile l’uso del tipo di dati Java long (64 bit) anziché int (32 bit), in quanto altrimenti le moltiplicazioni necessarie nel calcolo della funzione DET incorrerebbero in degli errori di trabocco (overflow). Formato di Input. L’input è formato da: • Una riga contenente il numero N di vertici del poligono (con 3 ≤ N ≤ 10000). • N righe, ciascuna contenente una coppia di interi x, y (separati da uno spazio), con 0 ≤ x, y ≤ 109 . Ciascuna di queste righe descrive un vertice del poligono convesso, con coordinate (x, y). I vertici sono elencati in ordine antiorario e a partire dal vertice p0 con coordinata y massima. Nessun lato del poligono è parallelo all’asse x. In altre parole, ciascun vertice pi del poligono ha coordinata y diversa da quella del vertice successivo pi+1 (questo vale anche per la coppia (pN −1 , p0 )). • Una riga contenente il numero Q di punti dei quali si vuole verificare il contenimento nel poligono (con 1 ≤ Q ≤ 10000). 5 • Q righe, ciascuna contenente una coppia di interi x, y (separati da uno spazio), con 0 ≤ x, y ≤ 109 . Ciascuna di queste righe descrive un punto q con coordinate (x, y) del quale si vuole verificare il contenimento nel poligono. Questa sequenza di punti potrebbe contenere duplicati. Formato di Output. L’output è formato da Q righe, una per ciascun punto q di cui si chiedeva di verificare il contenimento. Ciascuna riga contiene la stringa true o false a seconda che il punto q sia, rispettivamente, contenuto oppure non contenuto nel poligono. Se il punto q è sul bordo del poligono, è da considerarsi contenuto in esso. Esempio di input. 3 0 0 3 5 2 2 0 0 2 4 0 1 0 1 0 2 3 Output corrispondente. false true true true false Limiti e requisiti Percentuale di istanze di test che è necessario risolvere correttamente: 60%. Limite al tempo di esecuzione: • istanze con Q < 750: 1 secondo • istanze con 750 ≤ Q ≤ 10000: 2 secondi Limite alla lunghezza del codice Java: 48 Kb. Attenzione! L’uso di offuscatori di codice non è ammesso. Codice molto simile a quello generato da un offuscatore di codice Java sarà escluso dalla valutazione e/o squalificato, anche a posteriori, a discrezione del docente.
Scaricare