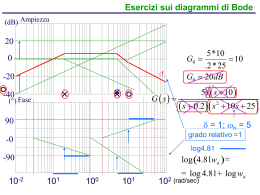
Cognome: Nome: N. Matr.: Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 luglio 2013 - Quiz Per ciascuno dei seguenti quesiti, segnare con una crocetta le risposte che si ritengono corrette. Alcuni quesiti possono avere più risposte corrette. I quiz si ritengono superati se vengono individuate almeno metà delle risposte esatte (punti 5 su 10), diversamente il compito verrà ritenuto insufficiente a prescindere dal risultato della seconda prova. Bode Diagram 120 100 80 60 Magnitude (dB) 1. Se il sistema dinamico retroazionato la cui funzione di anello è riportata in figura (diagramma di Bode delle ampiezze) è affetto da un disturbo di misura n(t) = sin(0.1 t), l’ampiezza del disturbo sovrapposto all’uscita sarà approssimativamente: N 1 40 20 1/60 1/100 0 −20 −40 1/1000 −60 −2 10 −1 10 0 1 10 10 2 10 Frequency (rad/sec) 2. Dato un sistema di controllo in retroazione, nel caso in cui le specifiche dinamiche siano incompatibili a causa di un tempo di assestamento desiderato molto piccolo e di un disturbo di misura ’n’ a frequenza relativamente bassa, si procede: assicurando con la retroazione il tempo di assestamento desiderato e introducendo un filtro sul ramo di retroazione per attenuare il disturbo N attenuando con la retroazione il disturbo di misura e imponendo con un prefiltro il tempo di assestamento desiderato attenuando il disturbo con un compensatore dedicato (compensazione dei disturbi misurabili) e imponendo con la retroazione il tempo di assestamento desiderato 3. Dato un sistema affetto da un ritardo t0 = 0.4s, qual è il valore della pulsazione di incrocio che garantisce un peggioramento del margine di fase al più pari a 30o ? N ωc ≃ 1.3 rad/s ωc ≃ 12 rad/s ωc ≃ 46.2 rad/s ωc ≃ 75 rad/s 4. L’introduzione di un’azione in avanti: richiede la conoscenza analitica del segnale di riferimento N permette di avere errore di inseguimento nullo in condizioni nominali è robusta rispetto a incertezze sui parametri dell’impianto può essere applicata solo a impianti con grado relativo nullo 5. Il prefiltraggio del segnale di riferimento: N può servire per ridurre lo sforzo di controllo N può servire per eliminare dinamiche parassite (es. cancellazione parziale polo-zero) eventualmente presenti nel sistema in retroazione può servire per cancellare disturbi sull’uscita misurabili 3 10 6. In un impianto affetto da variazioni parametriche e disturbi, controllato con un regolatore PID, l’azione integrale garantisce: compensazione perfetta (errore nullo) a regime degli offset di misura compensazione perfetta (errore nullo) a regime dei disturbi d(t) in bassa frequenza N compensazione perfetta (errore nullo) a regime dei disturbi d(t) costanti N compensazione perfetta (errore nullo) a regime degli errori sui parametri 7. Se nell’intervallo di specifica della pulsazione di attraversamento il valore della fase del sistema è sempre maggiore al margine di fase desiderato: il N il N il N il regolatore può essere una rete anticipatrice regolatore può essere un semplice proporzionale regolatore può essere una rete ritardatrice regolatore può essere un PI 8. Il campionamento impulsivo di un segnale tempo-continuo (caratterizzato da uno spettro X(s)) con periodo T = 2π/ωs , genera una sequenza il cui spettro vale X ⋆ (jω) = T ∞ X X(jω − j nωs ) n=−∞ ∞ 1 X X (jω) = X(jω − j n2ωs ) T n=−∞ ⋆ N X ⋆ (jω) = ∞ 1 X X(jω − j nωs ) T n=−∞ X ⋆ (jω) = T ∞ X X(jω − j n2ωs ) n=−∞ 9. Dato un sistema di controllo digitale in retroazione (con ωc = 0.2 rad/s) caratterizzato da un filtro antialising del secondo ordine sul ramo di retroazione con pulsazione di taglio ωaa = 5 rad/s, quale dovrebbe essere la minima pulsazione di campionamento che garantisce un attenuazione di almeno 100 volte di quelle componenti spettrali ad alta frequenza che potrebbero essere riportate nella banda del sistema dal fenomeno dell’aliasing? ωs = 20 rad/sec ωs = 50 rad/sec N ωs = 100 rad/sec ωs = 200 rad/sec 10. Quale traiettoria punto-punto tra quelle elencate è da preferire nel caso in cui venga applicata a un sistema risonante? traiettoria polinomiale di grado 3 traiettoria armonica traiettoria trapezoidale in velocità N traiettoria doppia-S in velocità Cognome: Nome: N. Matr.: Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 luglio 2013 - Problemi e domande a risposta aperta Rispondere in maniera analitica ai seguenti quesiti. I problemi e le domande a risposta aperta si ritengono superati se vengono conseguiti almeno metà dei punti totali (10 su 20), diversamente il compito verrà ritenuto insufficiente a prescindere dal risultato della prima prova. 1. Descrivere le principali tecniche per la taratura dei regolatori PID. 2. Dato l’impianto descritto dalla funzione di trasferimento: G(s) = 8 (s + 2) (s + 0.1)(s + 30) a) Progettare un regolatore statico Rs (s) che consenta il soddisfacimento delle seguenti specifiche di bassa frequenza: – errore di velocità (ovvero errore a regime per ingresso a rampa) inferiore al 5%; – attenuazione di almeno 200 volte di un disturbo sinusoidale sull’uscita “d” con pulsazione ωd = 0.1 rad/s. SOLUZIONE: Dal momento che è richiesto errore a regime limitato per ingresso a rampa il regolatore statico Rs (s) dovrà avere un polo nell’origine (dal momento che nell’impiano non ve ne sono), e quindi avrà la forma µ Rs (s) = s dove µ è determinato imponendo il soddisfacimento delle due condizioni di bassa frequenza. In particolare dalla prima si ricava ev = 1 1 1 = ≤ 0.05 → µ ≥ = 3.75 µ lims→0 s s G(0) µ G(0) 0.05 G(0) essendo il guadagno statico G(0) = 5.33. Dalla seconda condizione, che può essere riscritta come 1 alla pulsazione ωd = 0.1rad/s |S(jω)| ≤ 200 considerando l’espressione approssimata di |S(jω)| per basse frequenze, si ricava |S(jωd )| ≈ 1 1 ≤ 0.005. = µ |L(jωd )| G(jω ) d jωd 1 Svolgendo i calcoli risulta |G(j0.1)/j0.1| = 37.7593 da cui µ ≥ = 5.2967. 37.7593 · 0.005 Per garantire che entrambe le condizioni siano verificate, occorre assumere il valore di µ più grande tra quelli trovati. In particolare si considera µ = 6. b) Tracciare negli schemi forniti i diagrammi di Bode asintotici di Ge (s) = Rs (s)G(s) e valutare dai grafici i valori del margine di fase Mf , margine di ampiezza Ma , pulsazione di incrocio ωc e pulsazione critica ωf . SOLUZIONE: Vedere diagramma in fondo. Mf = 45.8o, ωc = 2.17 rad/s, Ma = ∞, ωf non esiste. c) Progettare il regolatore dinamico Rd (s) di complessità minima che consenta il soddisfacimento delle seguenti specifiche tenendo in considerazione che al punto successivo viene richiesta la progettazione di un prefiltro (essendo le specifiche richieste chiaramente incompatibili tra loro si scelga quali soddisfare col regolatore dinamico e quali con l’aggiunta del prefiltro): – tempo di assestamento Ta ≤ 0.15 s; – risposta aperiodica per ingresso a gradino. – attenuazione di almeno 100 volte di un disturbo di misura sinusoidale a frequenza fn = 100Hz (ωn = 628 rad/s) SOLUZIONE: Per il calcolo del regolatore dinamico si considera il sistema esteso Ge (s) = (s + 2) . 48 s(s + 0.1)(s + 30) Le specifiche dinamiche possono essere tradotte in vincoli sul margine di fase e sulla pulsazione di incrocio della funzione d’anello. In particolare, Ta ≤ 0.15s ⇒ 3 ωc risposta aperiodica ⇒ Mf ≈ 80o attenuazione di 100 volte del diturbo di misura ⇒ ωc ≤ ≤ 0.15s 628 100 ⇒ ωc ≥ 20rad/s = 6.28rad/s Dal momento che le due specifiche su ωc sono incompatibili, si progetterà il regolatore dinamico con l’obiettivo di attenuare il disturbo di misura, demandando al prefiltro l’ottenimento del tempo di assestamento desiderato. Di conseguenza si assumerà Mf⋆ = 80o e ωc⋆ = 6 rad/s. Dal calcolo del modulo e dell’argomento di Ge (jω), alla pulsazione ωc⋆ (e dai diagrammi di bode appena tracciati) si evince come sia necessaria una rete anticipatrice. Infatti, |Ge (j6)| = 0.2756 e arg(Ge (j6)) = −118.7900o. Pertanto l’amplificazione della rete dovrà essere 1 = 3.6285, M⋆ = |Ge (jωc⋆ )| mentre lo sfasamento dovrà essere ϕ⋆ = −180o + Mf⋆ − arg(Ge (jωc⋆ )) = 18.79o. M ⋆ e ϕ⋆ verificano le condizioni di applicabilità di una rete anticipatrice. Dalle formule di inversione si ricava che τ = 1.3877 e α = 0.2502 per cui Rd (s) = 1.388 s + 1 0.3473 s + 1 d) Progettare il prefiltro Rpf (s) che consenta il soddisfacimento di tutte le specifiche richieste al punto precedente. SOLUZIONE: Il prefiltro ha lo scopo di rendere il sistema retroazionato più veloce, allargandone la banda fino a ottenre una pulsazione di taglio di 20 rad/s (anzichè l’attuale di 6 rad/s), come richiesto dalla specifica sul tempo di assestamento. Pertanto avrà l’espressione s +1 Rpf (s) = 6s +1 20 e) Riportare negli schemi forniti il modulo della funzione d’anello L(s) = R(s)G(s) (con R(s) = Rs (s) Rd (s)) e della funzione di sensitività complementare F (s) (schema in alto) e sovrapposti nello stesso schema (in basso) il modulo di F (s), quello di Rpf (s) e quello della nuova funzione di trasferimento ingresso-uscita F ′ (s) = Rpf (s)F (s). SOLUZIONE: Vedere diagramma in fondo. f) Volendo discretizzare sia il regolatore R(s) = Rs (s)Rd (s) che prefiltro Rpf (s) scegliere il tempo di campionamento più idoneo tenendo in considerazione lo spettro dei segnali in gioco e discretizzare entrambi i sistemi con il metodo di Tustin. SOLUZIONE: Non avendo specifiche richieste, il tempo di campionamento può essere scelto assumendo una pulsazione di campionamento pari a 10 volte la massima pulsazione dei segnali in gioco che in questo caso risulta pari a ωmax = 20rad/s (larghezza di banda della funzione ingresso-uscita con prefiltro) Per la scelta del tempo di campionamento si considera Le condizioni per la scelta del tempo di campionamento comportano nell’ordine ωs = 10ωmax = 200 rad/s ⇒ T = 2π = 0.0314 s ωs Arrotondando si assume T = 0.02 s. 2 1 − z −1 Sostituendo s = i corrispondenti sistemi discretizzati risultano T 1 + z −1 R(s) = 6 1.388 s + 1 s 0.3473 s + 1 ⇒ R(z) = s +1 Rpf (s) = 6s +1 20 ⇒ 0.2347 z 2 + 0.003359 z − 0.2314 0.2347 + 0.003359 z −1 − 0.2314 z −2 = 1 − 1.944 z −1 + 0.944 z −2 z 2 − 1.944 z + 0.944 2.944 − 2.611 z −1 2.944 z − 2.611 = −1 1 − 0.6667 z z − 0.6667 Rpf (z) = g) Scrivere le equazioni alle differenze corrispondenti ai due sistemi discretizzati al punto precedente Y (z) U (z) e Rpf (z) = . R(z) = E(z) Q(z) SOLUZIONE: Interpretando z −1 come l’operatore ritardo unitario segue immediatamente che le equazioni alle differenze corrispondenti a R(z) e M (z) sono: R(z) = U (z) 0.2347 + 0.003359 z −1 − 0.2314 z −2 = 1 − 1.944 z −1 + 0.944 z −2 E(z) ⇓ uk = 1.944 uk−1 − 0.944 uk−2 + 0.2347ek + 0.003359ek−1 − 0.2314ek−2 Rpf (z) = 2.944 − 2.611 z −1 Y (z) = −1 1 − 0.6667 z Q(z) ⇒ yk = 0.6667yk−1 + 2.944qk − 2.611qk−1 h) Dato un carico inerziale (Jl = 0.5 kg m2 ) con attrito trascurabile (bl ≃ 0), movimentato da un attuatore caratterizzato dai seguenti limiti fisici - Coppia di picco τp = 6 N m - Coppia continuativa τc = 3.5 N m - Velocità nominale vn = 5 rad/s si scelga tra le traiettorie di cui in tabella vengono riportati i coefficienti normalizzati di velocità e accelerazione (massimi ed efficaci) quella che garantisce la durata minore, considerando uno spostamento (ripetuto ciclicamente) da q0 = 2 a q1 = 7, e ritorno. Scrivere l’espressione analitica di tale traiettoria (andata e ritorno). Traiettoria Trapezoidale (T = 2Ta ) Armonica Cicloidale Polinomiale grado 3 Cv 2 1.5708 2 1.5 Ca 4 4.9348 6.2832 6 Cv,ef f 1.1547 1.1107 1.2247 1.0954 Ca,ef f 4 3.4544 4.4428 3.4131 SOLUZIONE: E’ necessario prima di tutto ricavare i vincoli di velocità e acclerazione imposti dal sistema e dall’attuazione. La massima velocità della traiettoria può essere solo pari a quella nominale dell’attuatore, cioè vmax = 5 rad/s. Essendo il carico prevalentemente inerziale la velocità massima può calcolarsi come τp amax = Jl ed è perciò pari a amax = 12 rad/s2 . Stesso calcolo anche per l’accelerazione efficace ma considerando la coppia continuativa dell’attuatore al posto di quella di picco: aef f = τc = 7 rad/s2 Jl Per ciscuna delle traiettorie incluse in tabella occorre calcolare i tempi che discendono dai vincoli di velocità e accelerazione. Tali durate, calcolate come s r h Cv h Ca h Ca,ef f Tv = , Ta = , Ta,ef f = , con h = q1 − q0 = 0.5 vmax amax aef f sono incluse nella tabella che segue. Traiettoria Trapezoidale (T = 2Ta ) Armonica Cicloidale Polinomiale grado 3 Tv 0.2 0.15708 0.2 0.15 Ta 0.4082 0.4534 0.5117 0.5 Ta,ef f 0.5345 0.4967 0.5633 0.4938 Tmax 0.5345 0.4967 0.5633 0.5 Come si vede la traiettoria che ha la durata Tmax inferiore è la traiettoria armonica, la cui espressione risulta πt , 0≤t<T qa (t) = 2 + 2.5 1 − cos T π (t − T ) qr (t) = 7 − 2.5 1 − cos , T ≤ t ≤ 2T T dove T = 0.4967 s. Cognome: Nome: N. Matr.: Sistemi di controllo Ingegneria Meccanica e Ingegneria del Veicolo Compito del 2 luglio 2013 - Problemi e domande a risposta aperta Diagramma di Bode delle ampiezze di Ge (s) 100 80 Modulo M [db] 60 40 20 0 −20 −40 −60 Fase φ [gradi] −80 −100 90 60 30 0 −30 −60 −90 −120 −150 −180 −210 −240 −270 −2 10 −1 0 10 10 1 10 Pulsazione ω [rad/s] ωc : ωf : Mf : Ma : 2 10 3 10 Diagramma di Bode delle ampiezze di L(s) e F (s) 80 60 Modulo M [db] 40 20 0 −20 −40 −60 −80 −2 10 −1 10 0 10 Pulsazione ω [rad/s] 1 10 2 10 Diagramma di Bode delle ampiezze di F (s), Rpf (s) e F ′ (s) = Rpf (s)F (s) 80 60 Modulo M [db] 40 20 0 −20 −40 −60 −80 −2 10 −1 10 0 10 Pulsazione ω [rad/s] 1 10 2 10
Scaricare