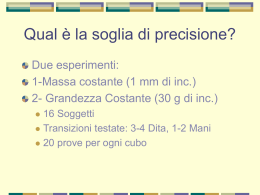
Dimensioni Scalate “..scoprire relazioni a-dimensionali fra variabile fisiche tali che il risultato sia indipendente dalle dimensioni suggerendo la presenza di principii fondamentali” (McMahon, 1983) Ipotesi: prensione • Il numero ed il tipo di dita usate per afferrare un oggetto possono essere definite dalle caratteristiche di massa-lunghezza dell’oggetto e della mano che lo afferra • Questa relazione puo’ essere scalata su lunghezze e masse di mani e oggetti diversi Domande • Puo’ una configurazione di presa (definita come numero e tipo di dita usate per afferrare un oggetto), essere predetta dalle caratteristiche dimensionali dell’oggetto e della mano? • Esiste un fattore scalare in grado di catturare questa relazione? Telecamera Sphere Switch Force cell Light sensor 4 esperimenti • 70 Soggetti (35 F & 35 M) M = L3 Eta’ 6-50 anni 0 . 7 0 . 6 0 . 5 Mh 0 . 4 0 . 3 0 . 2 0 . 1 0 . 0 1 0 1 2 1 4 1 6 1 8 L h 2 0 2 2 • Massa della mano (Mm) 0.11-0.68 kg • Lunghezza della mano (Lm) 11.4-20.8 cm Valori Naturali 5000 Balsa D1 Pine D2 Purple Heart D3 Aluminum D4 Steel D5 4000 Mass (g) 3000 Valori Logaritmici 2000 9 1000 8 7 0 6 5 0 2 4 6 8 10 12 14 16 18 LnMas 4 Diameter (cm) 3 B a l s a P i n e P u r p l e H a r t A l u m i n u m S t e e l 2 1 0 62 Cubi 62 Sfere 5 Densita’, balsa, pino, quercia, alluminio, ferro fra 0.2 to 8.5 (g/cm3) Lato da 0.67 a 17.7 (cm) Massa da 5 a 6000 (g) 1 1 2 L n D i a m e t e r Metodo Testate 5 densita’ diverse: balsa, pino quercia, alluminio, ferro Cubi e sfere presentati in ordine casuale 10 prove per ogni cubo o sfera. Totale 620 prove per soggetto Definito il numero di dita in contatto con il cubo/sfera Transizioni fra le Configurazioni logMc 2D 3D 4D 2Hands 5D Trova l’inclinazione della linea piu’ vincolata Disegna le altre linee in modo parallelo b a2-3 logLc a3-4 a4-5 a1-2H logMc 2D 3D 4D logMc= a - b logLc dividiamo per b: 2Hands 5D b log M c a blog Lc b b b a2-3 a3-4 a4-5 a1-2H definiamo: K a logLc log M c K logLc b b MeanNumberofDigts B a l s a P i n e Adulti P u r p l e A l u m i n u m S t e e l 7 6 5 7 1 0 H L = 1 7 . 2 ( c m ) H M = 0 . 3 5 ( k g ) H L = 1 8 . 1 ( c m ) H M = 0 . 4 6 ( k g ) 3 9 H L = 1 9 . 3 ( c m ) H M = 0 . 4 9 ( k g ) H L = 1 6 . 5 ( c m ) H M = 0 . 2 9 ( k g ) 4 3 2 1 7 6 5 4 3 2 1 0 1 2 3 4 0 K v a l u e 1 2 3 4 Transizioni fra le configurazioni bambino 10 2 hands 8 logMc 6 slope (-3) 4 5D 2 4D 3D 0 2D -2 -4 -1 0 1 logL c 2 3 Bambini A g e 6 to 8 7 7 1 G r ip C o n fig u r a tio n M o d e 6 6 5 5 4 4 3 3 2 2 1 10 1 -2 -1 0 1 2 3 4 5 6 -2 -1 0 1 2 3 4 5 6 A g e 8 to 1 0 7 7 12 6 5 6 5 4 4 3 3 2 2 1 18 1 -2 -1 0 1 2 3 4 5 -2 6 -1 0 1 2 3 4 5 6 0 1 2 3 4 5 6 A g e 1 0 to 1 2 7 7 21 6 25 6 5 5 4 4 3 3 2 2 1 1 -2 -1 0 1 2 3 4 5 6 K v a lu e -2 -1 4 K value 3 age group 6-8 age group 8-10 age group 10-12 adults small group adults big group 2 1 0 2 to 3 digits 3 to 4 digits 4 to 5 digits Grip Transitions 1 to 2 hands 7 B alsa P ine P urple A lum inum S teel 6 5 M ean N um ber of D igits 4 3 2 S4 1 -2 0 2 4 6 8 10 12 7 6 5 4 3 2 S 10 1 -2 0 2 4 6 8 LN M om ent of Inertia 10 12 14 Implicazioni teoriche Il valore K scala le 4 transizioni di presa basandosi sul rapporto massalunghezza mano-oggetto K e’ un rapporto a-dimensionale tale che e’ in grado di predirre le transizioni per gli adulti come per i bambini
Scaricare