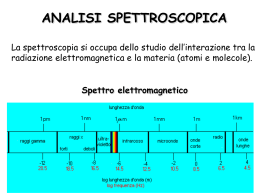
Sintassi- Semantica operazionale • Dato un linguaggio definito da una sintassi esprimere il suo significato • Ci sono vari modi ….. • Uno possibile e’ “tradurre” i suoi costrutti in un altro linguaggio noto ad es: da C as ASSEMBLER 1 Linguaggio FSP • La sua sintassi e’ data come insieme di operatori che compongono processi • Operatori: prefisso, scelta, parallelo, ….. • Processi: STOP, espressioni che compongono azioni espressioni che compongono processi 2 Quale linguaggio per la sua semantica operazionale? Le Reti di Automi Sovrapposti (SA Net): un linguaggio concorrenti per la specifica di sistemi grafico ma con una base formale ben definita sintassi molto semplice ma potente approccio composizionale (come FSP) 3 Il punto di vista “Un sistema è una parte del mondo che una persona o un gruppo di persone, durante un certo intervallo di tempo, sceglie di considerare come un tutto formato di componenti interagenti” Ciascuna componente ha propri stati ed evolve per effetto di azioni, scelte locali e per effetto di interazioni con altre componenti. 4 La potenza espressiva • Stati, azioni e interazioni • Localita’ di stati e azioni • Il comportamento globale ‘emerge’ dalla composizione di comportamenti locali • Facilita’ di cogliere la natura distribuita dei processi reali 5 Semantica ben definita • Derivano dalle Reti di Petri un modello matematico sottostante • Operatori , leggi di composizione e strumenti modellistici potenti e ben fondati • Tools di supporto per descrizioni complesse 6 Pochi costrutti: struttura delle attivita’ • Stati : • Azioni : • Causalita’: detto posto detta transizione detto flusso • Le transizionizioni sono etichettate: – a, b, c, … azioni visibili – tau azioni invisibili 7 Un esempio A B s1 a e s5 s3 a s4 b b s2 s7 g c s6 s8 d d 8 Localita’ • ogni stato e’ definito dalle azioni locali che lo producono e che sono da esso dipendenti • ogni transizione e’ definita dagli stati locali da cui dipende e che essa genera 9 Pochi costrutti: il comportamento • Lo stato corrente e’ rappresentato da una ‘marca’ : • Stato = condizione vera/falsa • Il comportamento e’ rappresentato in termini di cambiamento di stato: – Regola di scatto di una transizione 10 Concessione e regola di scatto di una transizione Un transizione può scattare quando sono marcati tutti i suoi posti di ingresso: un’azione può avere luogo quando tutte le sue precondizioni sono verificate. scatto Lo scatto di una transizione toglie la marca da tutti i suoi posti di ingresso e mette una marca in tutti i suoi posti di uscita: il verificarsi dell’azione rende false le sue precondizioni e rende vere le postcondizioni. 11 Un esempio …. A B s1 a con B e con X s5 s3 a con A s4 b b s2 s7 c con Y s8 g s6 d con A e C d con B e C 12 Modellazione di realta’ complesse • Una disciplina per costruire il modello basata su: – Approccio bottom-up • Derivare le componenti del sistema dalla realta’ • Costruzione di modelli per ciascuna di esse (componenti elementari) • Comporre tali modelli nel sistema complessivo 13 componente elementare Non contiene concorrenza ma solo non determinismo. È una macchina a stati (un automa a stati finiti) con: • il nome della componente elementare che rappresenta • i posti interpretati come stati locali della componente elementare • le transizioni interpretate come azioni individuali o di interazione • la marcatura iniziale definita dal posto che rappresenta lo stato iniziale 14 Un esempio con una notazione particolare mi alzo fork mi vesto faccio colazione join esco 15 Convenzione In una componente elementare, FORK-JOIN indica che le transizioni comprese possono essere eseguite in ogni ordine possibile, rispettando le relazioni causali espresse. 16 Dalle componenti al sistema Un sistema e’ costruito per composizione dei modelli delle sue componenti elementari Due operazioni di composizione che si basano sulla dualita’ tra posti e transizioni 17 T- composizione La T- composizione avviene in tre fasi: 1- distinguendo le azioni locali alla componente dalle sue interazioni con altre componenti: etichettatura delle transizioni 2- sovrapponendo le transizioni con la stessa etichetta e attribuendo alla transizione risultante come posti di ingresso/uscita l’insieme dei posti di ingresso/uscita delle transizioni sovrapposte. 3- se in ciascuna componente compaiono più transizioni che rappresentano la stessa interazione, la sovrapposizione di transizioni è operata solo dopo aver generato in ogni componente un opportuno numero di copie di tali transizioni. 18 Un esempio semplice 19 Un esempio A A B s1 a con B s5 a con A s2 a e con X s5 s4 s3 s3 s4 b b b s1 s2 e con X B g s7 s6 g s7 b s6 c con Y c con Y d con A e C s8 d con B e C s8 d con C 20 S-composizione (opzionale) • Identificando i posti che rappresentano lo stesso stato in diverse componenti • Sovrapponendo tali posti e attribuendo al posto risultante come transizioni di ingresso/uscita l’insieme delle transizioni di ingresso/uscita dei posti sovrapposti. – Consente la semplificazione del modello in alcune situazioni (Buffer) – Consente la costruzione incrementale del modello (simulando gli operatori di scelta e di prefisso del linguaggio FSP) 21 Esempi Utente Componente A invio Componente B ricezione Il posto in rosso e’ un buffer Decide di fare altro Fa altro Decide di usare la risorsa Usa la risorsa Rilscia la risorsa Il posto in giallo si puo’ sovrapporre ad un posto della componente utente, generando una scelta 22 Il modello risultante Una rete SA è un grafo orientato con due tipi di nodi, posti e transizioni, alternativamente connessi da archi orientati in modo tale che: a) non ci siano nodi isolati b) due posti o due transizioni non siano mai connessi c) ogni transizione abbia lo stesso numero di archi entranti e uscenti (a meno dei buffer) d) l’insieme dei posti sia ripartibile in classi disgiunte che costituiscono gli stati di ciacuna componente (a meno dei buffer) 23 Un esempio s1 s2 a e con X s5 s3 s4 b g s7 b s6 c con Y s8 d con C 24 Conflitto e concorrenza Due transizioni si dicono in conflitto tra loro quando hanno entrambe concessione e condividono almeno un posto di ingresso. a c b d e f Due transizioni si dicono concorrenti quando hanno concessione sotto la stessa marcatura e non sono in conflitto fra loro 25 Non-determinismo globale e locale • Quale componente decide il comportamento congiunto? B s1 s2 A B t3 t1 A t2 A t4 s1 s3 s2 s4 t2 t1 s3 s7 s5 s6 s8 B t3 t2 s4 26 Uso del modello risultante Il modello risultante serve per provare proprietà del sistema tramite strumenti capaci di trattare la complessità di sistemi reali, facendo uso del modello matematico sottostante: costruzione del modello complessivo generazione delle possibili evoluzioni (Grafo di raggiungibilita’) calcolo di proprieta’ invarianti calcolo di performance ecc. 27 Dato il sistema SA A B A s1 B s2 a con B s5 a con A s4 s1 s2 a e con X s3 b b g s7 s3 d con B e C s4 s6 b d con A e C s7 c con Y s8 s5 b g s6 c con Y s8 d con C 28 Il suo Grafo di Raggiungibilità e’: < s1, s2 > e con x a < s 3 , s2 > b < s 5 , s4 > g b < s1, s2 > < s7, s4 > c con y g < s 8 , s4 > g < s5, s6 > b < s7, s6 > c con y < s8, s6 > d con C < s1, s2 > tutti i comportamenti possibili 29 Il corrispondente FSP e’: A = (e_conX --> b --> A | a_conB --> b --> c_conY --> d_conBeC -->A) B = (a_conA --> g --> d_conAeC --> B A_B = (A || B ) (i colori indicano le azioni da sovrapporre) Il cui LST e’ isomorfo al precedente grafo di raggiungibilita’: stesso numero di nodi (stati), stesso numero di archi con eguale etichettatura 30 Nozione di osservabilita’ e di Equivalenza all’Osservazione La nozione di osservabilita’ consente di modellare un sistema focalizzandosi sul modo in cui esso comunica con l’ambiente, astraendo dalla sua organizzazione interna (cioe’ dalla sua suddivisione in componenti e dalle modalità con cui queste interagiscono) Due sistemi sono equivalenti all’osservazione se non sono distinguibili da nessun possibile ambiente 31 Operativamente … • Si identificano le azioni interne e le si etichetta convenzionalmente con tau • Un osservatore non le puo’ distinguere • Si etichettano con tau anche le interazioni tra componenti • Un osservatore non le puo’ distinguere • [Si riduce il sistema (in modo automatico) eliminando le tau non necessarie] 32 Operativamente … • Quello che resta e’ la struttura delle interazioni con l’ambiente – Comunicazioni (visibili) – Alcune tau che servono per esprimere la struttura causale • Il confronto tra sistemi si fa seguendo tutti i cammini possibili (in modo automatico) 33 Un esempio C1 C a C2 s2 tau a s4 b C3 b s6 tau c c tau 34 Attenzione • I contenuti delle slide che seguono NON fanno parte del programma del corso • Si lasciano per completezza rispetto all’uso delle Reti SAcome linguaggio di specifica 35 Motivazione per strumenti di supporto • La modellazione di un sistema puo’ avvenire in modo incrementale in diversi modi: – Aggiungendo cammini alternativi – Precisando la definizione di una azione in una struttura di azioni piu’ elementari – Modificando il numero di componenti che costituiscono il sistema • Necessita’ di concetti specifici per governare questo processo 36 Tre nozioni per la modellazione incrementale: • Estensione funzionale • Raffinamento/astrazione funzionale • Raffinamento/astrazione organizzativo 37 Estensione funzionale L’Estensione Funzionale amplia i possibili comportamenti di un sistema e/o di una o più delle sue componenti: si realizza tramite la S-composizione Le estensioni funzionali consentono di considerare sistemi con funzionalita’ man mano più complesse. La duplicazione delle transizioni per consentire la T-composizione e’ un caso di raffinamento funzionale. Si ricordi l’esempio precedente ..... 38 Raffinamento funzionale Il Raffinamento Funzionale isola una transizione o un posto e la/lo sostituisce con una sottorete in modo che sia comunque garantita la trasformazione di stato definita nel modello di partenza. 39 Raffinamento funzionale: esempi 40 Raffinamento organizzativo Il Raffinamento Organizzativo isola una componente di un sistema e la sostituisce con un insieme di componenti in modo che sia comunque mantenuto il comportamento che la componente esibisce al suo ambiente. Sono necessarie delle nozioni di supporto ... 41 T-Scomposizione E’ l’operazione inversa alla T-Composizione: permette di estrarre dal sistema il modello di una componente elementare o di alcune componenti elementari. 42 Passi da eseguire iterativamente • Fissare un livello di astrazione – Quali componenti ? – Quale atomicita’ delle azioni e interazioni? • Verificare la coerenza delle descrizioni locali identificando le diversita’ dei punti di vista di chi fornisce la conoscenza • Allineare le descrizioni per raggiungere la coerenza • Eventualmente modificare il livello di astrazione, su tutto o parte del sistema, a seconda degli scopi e ripetere i passi precedenti 43 Documentare il processo di acquisizione • Il team può sviluppare tutti i modelli necessari, esplicitando quelli che lascia impliciti (ambiente), legando gli uni e gli altri con relazioni dal significato rigorosamente definito (gli operatori applicati), fissando per ciascun modello l’opportuno livello di astrazione • La distinzione in componenti facilita la localizzazione di possibili incoerenze e la estensione del comportamento attraverso la progettazione di componenti di correzione. 44
Scaricare