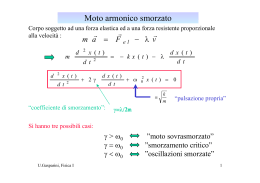
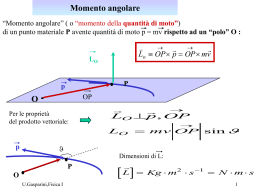
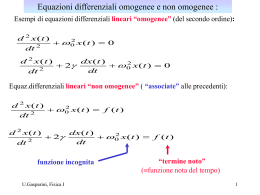
Moto dei pianeti Il moto dei pianeti è descritto dalle tre leggi di Keplero, basate sulle osservazioni dell’astronomo danese Tycho Brahe (1546-1601) ed assumendo il punto di vista eliocentrico di Nicolo’ Copernico (1473-1543). moto apparente di Marte Marte orizzonte delle “stelle fisse” Sole Terra Il moto apparente dei pianeti osservato da un sistema geocentrico (tolemaico) è complicato: il modello cinematico che lo descrive è artificioso... U.Gasparini, Fisica I ( “epicicli”, “deferenti”….) 1 Le tre leggi di Keplero: 1) I pianeti si muovono su orbite piane descrivendo ellissi aventi il Sole in uno dei fuochi. 2.3 108 Km ( 13 min-luce) 4.5 109 Km ( 4 h 15 min -luce) U.Gasparini, Fisica I 2 2a legge di Keplero 2) Il moto avviene con “velocità areale” costante dA( t ) costante dt ( per un’orbita circolare : v = cost. ) dA(t ) r (t ) 1 r (t )ds(t ) sin 2 t+d t t+d t t v(t) t v(t) Cio’ è conseguenza della conservazione del momento angolare : LO = OP mv vr v(t) P v U.Gasparini, Fisica I r(t) ds Lo OP mv sin mr sin dt dA m2 dt Lo dA O ( Sole ) dt 2m 3 3a legge di Keplero 3) Il quadrato del periodo di rivoluzione è proporzionale al cubo del semiasse maggiore dell’orbita: 3 T 2 kRmax costante di Keplero (caratteristica del sistema solare) k 2.99 1019 s2 / m3 Esempio: R Marte 228 106 Km RTerra 149 106 Km Il Sole visto da “Pathfinder” TMarte TTerra R Marte RTerra 3 365 228 149 3 691 giorni “anno” marziano U.Gasparini, Fisica I 4 Equazione di una traiettoria ellittica In coordinate polari: semiasse maggiore r ( ) a (1 e ) 1 e cos 0 rmin a (1 e) “eccentricità” rmax rmin rmax rmin rsin F2 F1 P F2 P 2a r e P 2ae F1 0 e 1 rmax a (1 e) r ( ) “Ellisse”: circonferenza 2 F1 F2 rmax rmin 2ae a r 2 sin 2 (2ae r cos ) 2 2a r 2 sin 2 ( 2ae r cos ) 2 ( 2a r ) 2 r 2 4a 2 e 2 4aer cos 4a 2 4ar r 2 ae 2 er cos a r r (1 e cos ) a (1 e 2 ) L’ipotesi newtoniana Consideriamo un pianeta in orbita circolare intorno al Sole: v mP FP =ma =mv2 /R FS M Forza esercitata dal Sole sul pianeta : FP mP a mP v2 4 2 R 4 2 mP mP 2 R T kR 2 v Forza esecitata dal pianeta sul Sole : FS M 4 2 kpR 2 FP 4 2 4 2 Mk mP k P U.Gasparini, Fisica I 2R T 3a legge di Newton costante universale T 2 kR 3 4 2 m 4 2 M k kP FP mP M R2 6 Gravitazione universale Newton verifico’ la sua ipotesi confrontando l’attrazione gravitazionale esercitata dalla Terra sulla Luna con quella esercitata sugli oggetti sulla superficie terrestre : F MT F r2 r ML Stessa costante universale F U.Gasparini, Fisica I M L MT mM T 2 RT mg Forza peso sulla superficie della Terra 7 Per il moto di rivoluzione della Luna intorno alla Terra: F M L MT M La L r2 2 M L L r 2 3 M T L r g M T 2 RT 2 L r3 2 RT aL r RT r 384000Km RT 6400Km L 2 2 rad / giorno rad / s 27.5 27.5 86400 g 9,92m / s 2 U.Gasparini, Fisica I , da confrontare col valore sperimentale (al Polo): g exp 9,83m /8 s 2 “Massa ridotta” del sistema Terra-Luna : accelerazioni assolute ( in un sistema inerziale) Terra MT aL aT mL Luna a L a Centro di massa CM del sistema d Terra-Luna m T mL r r RT M 100 L T Accelerazione della Luna relativa alla Terra: M T mL mL a ' L a L atr a L a T a L aL aL MT M T MT aL aL ' M T mL MT F mL a L mL aL ' M T mL U.Gasparini, Fisica I “massa ridotta”: mL M T M T mL a L ' 9 Considerando la massa ridotta del sistema Terra-Luna: 2 a L ' L r F mL M T r2 accelerazione osservata dalla Terra 2 3 L r (mL MT ) 2 3 MT L r mL g M T 2 RT 2 3 L r 2 RT mL MT 80 m L 2 RT 9 ,92 0.1 9 ,82 m / s 2 in accordo col valore sperimentale. U.Gasparini, Fisica I 10
Scaricare