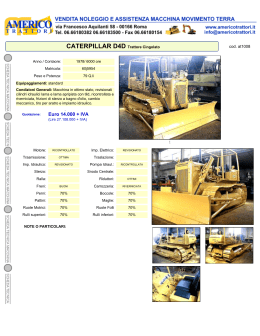
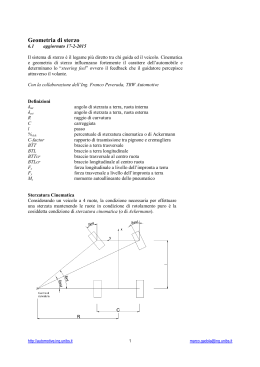
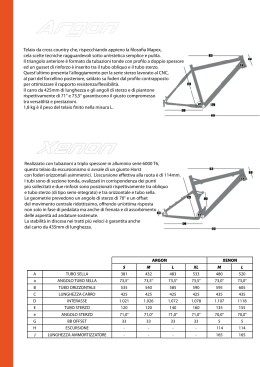
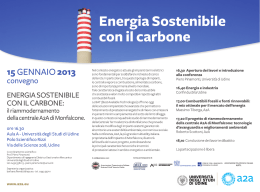
Sistemi di sterzo 7.0 aggiornato 24-6-2013 Questa dispensa integra la 6.X_Geometria di sterzo. È una panoramica sulle applicazioni più recenti dei sistemi di sterzo servoassistiti. Sono presenti anche cenni sugli effetti degli attriti interni del sistema di sterzo sullo “steering feel”. Con la collaborazione dell’Ing. Franco Peverada, TRW Automotive Vedere anche http://en.wikipedia.org/wiki/Power_steering Sterzo manuale Il sistema di sterzo più semplice è lo sterzo manuale. Alla base di questo sistema di sterzo c’è l’ingranamento pignone-cremagliera a denti elicoidali. La coppia applicata dal driver al volante viene trasmessa al pignone tramite un doppio giunto cardanico: ciò è dovuto sia a problemi di packaging all’interno del cruscotto, sia a questioni di sicurezza, in quanto in caso di urto frontale gli snodi evitano di avere un elemento rigido potenzialmente pericoloso puntato verso il driver. Sistema sterzo manuale con pignone e cremagliera (www.carcontacts.com) Piantone della Fiat 500 del 1957, realizzato con un elemento rigido e dunque pericoloso in caso di urto frontale. In questo caso la scatola guida era a vite e rullo, un sistema non più in uso. Il pignone trasmette alla cremagliera un carico assiale che, tramite i tiranti laterali fissati al portamozzo, consente la sterzatura delle ruote. In caso di urto laterale i tiranti sono progettati per fare da “fusibili” del sistema, infatti l’eventuale cedimento plastico consente di evitare la rottura dell’ingranamento e la conseguente perdita di controllo del veicolo. http://automotive.ing.unibs.it 1 [email protected] Il parametro più importante per definire il sistema di sterzo è il C-factor, ovvero il rapporto di trasmissione dell’ingranamento. Il C-factor viene espresso in mm di traslazione della cremagliera per rotazione del pignone (mm/giro). C-factor alti danno un sterzo più diretto ma più pesante e viceversa. Valori tipici di C-factor per auto con sterzo manuale sono compresi tra i 30 e i 40 mm/giro. Il servosterzo elettrico (EPS) Il continuo incremento di peso delle auto e la necessità di ottenere livelli di comfort sempre più elevati hanno reso necessario l’utilizzo di un asservimento che riduca lo sforzo necessario per effettuare le manovre. Si tratta dunque di un sistema che lavora in parallelo al guidatore, fornendo coppia in modo proporzionale alla coppia di input applicata al volante. Il servosterzo elettrico è il tipo di asservimento presente oramai sulla maggior parte delle auto di serie. Lo schema più diffuso è quello con asservimento al piantone. In particolare sull’albero del volante sono presenti un sensore di coppia e un encoder che misura l’angolo volante stesso. In funzione della coppia applicata al volante un ingranaggio del tipo ruota elicoidale/vite senza fine azionato da un motore elettrico fornisce una coppia aggiuntiva che consente al driver di eseguire manovre con uno sforzo minore. Schema di servosterzo elettrico(U.S. Patent N. 7992672 B2) 70 Assist Torque [Nm] 60 50 Parking 40 Highway 30 50 kph 20 10 0 0 5 10 15 HW Torque [Nm] Esempio qualitativo di curva di asservimento variabile in funzione della velocità del veicolo (HW Torque = coppia al volante) http://automotive.ing.unibs.it 2 [email protected] La curva di funzionamento del sistema avrà un andamento qualitativo come in figura. Si nota che l’asservimento aumenta con il diminuire della velocità del veicolo, questo per consentire un minor sforzo in fase di parcheggio, senza penalizzare la sicurezza e la sensibilità di guida alle velocità più alte. Oltre all’asservimento al piantone (o sul pignone) esistono servosterzi con asservimento sulla cremagliera. Uno di questi sistemi è il “dual pinion”, che prevede due zone dentate sulla cremagliera e due pignoni. Schema di funzionamento del sistema dual pinion (U.S. Patent N.6705421 B2) Un pignone è collegato al volante, e “vede” solo la coppia applicata dal driver. Il secondo è collegato al motore elettrico che fornisce l’asservimento con la stessa logica dell’asservimento al piantone. Un altro tipo di asservimento presenta sulla cremagliera un profilo elicoidale che tramite un sistema a vite con ricircolo di sfere consente la traslazione della cremagliera. La vite è collegata al motore elettrico di asservimento tramite una cinghia (sistema Belt Drive) o tramite un ingranaggio. Asservimento alla cremagliera con vite a ricircolo di sfere (U.S. Patent N. 6662897 B2) L’utilizzo di un asservimento consente l’adozione di rapporti di sterzo più diretti rispetto al caso manuale: valori tipici di C-factor per auto con servosterzo vanno da 40 a 55 mm/giro. Asservimenti di questo tipo consentono altri vantaggi tra cui la possibilità di ottenere un ricentraggio automatico del volante per migliorare il feeling di guida dei veicoli che presentano problemi di ritorno dello sterzo, e l’integrazione con i vari sistemi di sicurezza attiva per evitare la perdita di controllo del veicolo. http://automotive.ing.unibs.it 3 [email protected] Il servosterzo idraulico (HPS) Il servosterzo idraulico è stato introdotto sul mercato nei primi anni ’50 da Chrysler e General Motors. Esso accoppia il classico sterzo a pignone e cremagliera ad un impianto idraulico messo in pressione da una pompa volumetrica azionata dal motore tramite una cinghia. La scatola sterzo diventa praticamente un cilindro idraulico a doppio effetto in cui eseguendo una manovra di sterzo si mette in pressione una delle due camere del cilindro. Schema del servosterzo idraulico Lo sbilanciamento di pressione tra le due camere del cilindro è comandato da una valvola proporzionale posta sul piantone che, in funzione dell’entità e della direzione della coppia applicata al volante, apre dei condotti di mandata verso l’apposita camera del cilindro. Schema di funzionamento della valvola proporzionale (H.Heisler, Advanced vehicle technology, Butterworth-Heinemann 2002) http://automotive.ing.unibs.it 4 [email protected] Δp Esempio di valvola per servosterzo idraulico ( U.S.Patent N.6612336 B1) HW Torque Andamento qualitativo di curva caratteristica della valvola (HW Torque = coppia al volante, P = differenza di pressione tra le camere idrauliche) Un’evoluzione di questo sistema di sterzo consente anche la possibilità di intervenire sulla rigidezza torsionale della valvola, e di modificarla in funzione della velocità del veicolo. Questo consente di variare l’asservimento in funzione della velocità. Il servosterzo idraulico richiede più energia rispetto ad un sistema elettrico, e questo ne rende poco conveniente l’utilizzo. Tuttavia esso viene preferito per il miglior feeling di guida che offre rispetto ai sistemi elettrici laddove tale aspetto assume particolare importanza (ad esempio sulle auto sportive). Altro punto di forza dei sistemi idraulici è la possibilità di generare carichi elevati, cosa che ne rende l’utilizzo indispensabile per i veicoli industriali. Sull’ingranamento pignone-cremagliera infatti agisce solo la coppia volante. Servosterzo elettroidraulico (EHPS) L’unica differenza rispetto ad un HPS tradizionale consiste nell’azionamento elettrico della pompa di pressione, che migliora l’efficienza energetica del sistema. Sterzo a rapporto variabile Per sistemi di sterzo manuali l’adozione di un C-factor alto per consentire un buon feeling di guida può scontrarsi con la necessità di mantenere bassa la coppia volante necessaria in fase di parcheggio o nelle curve strette. Per questo motivo è stato http://automotive.ing.unibs.it 5 [email protected] sviluppato un ingranamento il cui rapporto di trasmissione varia lungo la corsa di funzionamento. Agendo sul modulo e sugli angoli caratteristici della dentatura della cremagliera, è possibile ottenere un C-factor più alto nella zona centrale della dentatura (curve ampie ed alte velocità), e un C-factor basso nelle zone laterali (manovre strette e di parcheggio, basse velocità). Nei sistemi dotati di servosterzo, dato che lo sforzo al volante non è critico, può essere utile invece rendere lo sterzo più diretto su tutta la corsa, ma ridurre il Cfactor nella zona di funzionamento centrale, per rendere l’auto meno reattiva rispetto alle piccole correzioni nella guida a velocità elevate, ad esempio in autostrada. Modifica della geometria dell’ingranamento per ottenere un rapporto variabile (H.Heisler, Advanced vehicle technology, Butterworth-Heinemann 2002) Andamento qualitativo del C-factor per diversi tipi di sistemi di sterzo (CR = Constant Ratio, VR = Variable Ratio) Un rapporto di trasmissione variabile può essere ottenuto anche con la sovrapposizione di un angolo di sterzata a quello imposto dal driver tramite il volante. Il primo modello equipaggiato con un sistema di questo tipo è la Honda http://automotive.ing.unibs.it 6 [email protected] S2000 type V nell’anno 2000: il C-factor viene modificato in funzione della velocità. Sistema VGS (Variable Gear ratio Steering), Honda S2000 Un controllo di questo tipo può essere realizzato per esempio tramite l’utilizzo di un rotismo epicicloidale collegato alla colonna (es. BMW Active Steering), oppure tramite l’utilizzo di un giunto Harmonic drive (es. Audi Dynamic Steering). In tutti i sistemi l’azionamento avviene tramite un motore elettrico, che lavora però in serie e non in parallelo all’input del guidatore. BMW Active Steering (www.bmwmotorsports.org) Audi Dynamic Steering (www.zf-lenksysteme.com) Oltre ad una gestione arbitraria del rapporto di sterzo in funzione delle condizioni di guida, sistemi di questo tipo consentono un’integrazione ancora più efficace con i sistemi di controllo attivo quali l’ESP. http://automotive.ing.unibs.it 7 [email protected] Funzionamento dell’Audi Dynamic Steering (Audi Service Training Manual) Gli attriti nella scatola sterzo All’interno dei sistemi di sterzo sono presenti elementi in strisciamento reciproco che producono attrito. Questi attriti devono essere tenuti in stretto controllo in quanto hanno grande influenza sia sul feeling di guida che sul funzionamento del sistema stesso. Diversi aspetti dell’attrito vanno tenuti in considerazione: l’attrito dinamico; l’attrito statico, e in particolar modo il salto rispetto al dinamico; fluttuazioni del valore di attrito lungo la corsa di azionamento. L’attrito dinamico I principali effetti di un attrito dinamico troppo elevato sono: - Mancato ritorno dello sterzo: per esempio rilasciando il volante in uscita di curva questo non torna in posizione centrale. Questo effetto è molto sgradevole per il driver, e in alcuni casi può creare situazioni di pericolo. - Incremento dello sforzo necessario per effettuare una sterzata. Il suo principale effetto è avvertibile nella zona a bassi angoli di sterzata (on-centre feeling), dove l’azionamento dello sterzo richiederebbe coppie molto basse. In questa zona l’incremento di coppia dovuto alla presenza degli attriti toglie progressività allo sterzo. - Maggior consumo di energia in caso di presenza di servoassistenza. L’attrito però non va controllato solo in termini di valore massimo, infatti valori troppo bassi di attrito dinamico possono provocare: - Eccessiva trasmissione di vibrazioni provenienti dalla strada al volante, l’attrito infatti ha anche una funzione di smorzamento delle vibrazioni; - Instabilità nel funzionamento dell’asservimento, con trasmissione al volante di vibrazioni di coppia date dal motore elettrico. Differenza tra attrito statico e dinamico Un’elevata differenza tra attrito statico e dinamico è da evitare nel modo più assoluto in quanto genera effetti sgradevoli quali: - Volante “sticky”, ovvero “incollato”. Questo effetto si può notare uscendo da una condizione di marcia rettilinea o di curvatura steady state: il volante richiederà uno sforzo iniziale elevato per vincere l’attrito di primo distacco, passando poi in una condizione di attrito dinamico con una repentina riduzione della coppia volante necessaria. http://automotive.ing.unibs.it 8 [email protected] - Problemi di stick&slip, con generazione di vibrazioni autoeccitanti e instabilità nel servosterzo. Fluttuazioni dell’attrito lungo la corsa del sistema Possono avere i seguenti effetti: - rendere la guida meno prevedibile e intuitiva; - rendere più difficoltosa la taratura della curva di asservimento. Isteresi nel sistema sterzo Per quanto riguarda i sistemi di asservimento idraulici gli attriti possono essere non solo di tipo meccanico, ma anche di tipo “viscoso”. Problema tipico dei classici sistemi di sterzo idraulici è quello relativo all’isteresi. Questo problema è dovuto ad attriti interni alla valvola che fanno sì che la curva di funzionamento in “andata” ( ingresso in curva) e in “ritorno” (uscita dalla curva), siano diverse: Questo fa sì che la fase iniziale della curva venga svolta con una coppia volante superiore a quella necessaria per l’uscita dalla curva: Andata l’attrito si oppone all’aumento di Δp Ritorno l’attrito si oppone alla diminuzione di Δp Questo problema viene spesso percepito nei cambi di direzione, ad esempio nelle curve a “S”. Variazione della curva caratteristica della valvola a causa degli attriti interni Nuove tecnologie - Steer by wire È un particolare sistema di sterzo in cui il collegamento tra volante e ruote non è meccanico ma “elettrico”. Il funzionamento del volante è molto simile a quello di un joystick con forcefeedback. La traslazione della cremagliera è comandata da motori elettrici controllati da una centralina che elabora i dati provenienti dal volante. L’adozione di un sistema di sterzo di questo tipo su auto di serie avverrà presumibilmente nel 2014 ad opera di Nissan-Infiniti. L’assenza di un collegamento meccanico con elevati coefficienti di sicurezza rende necessario l’utilizzo di numerose ridondanze nel sistema (2 motori elettrici, 3 centraline di gestione del sistema, una frizione che ripristina il collegamento meccanico volante-ruote in caso di fault elettronico). http://automotive.ing.unibs.it 9 [email protected] Sistema Steer-By-Wire ( www.nissan-global.com) Vantaggi di questo tipo di applicazione sono per esempio una gestione più libera del rapporto di sterzo e dell’effetto di filtraggio delle asperità stradali, e infine l’integrazione con i sistemi di sicurezza attiva. Bibliografia: [1] H.Heisler, Advanced vehicle technology, Butterworth-Heinemann 2002; [2] http://www.zf-lenksysteme.com/en/products/car-steering-systems.html ; [3] www.nissan-global.com/en/document/pdf/technology/2012/121017-03-e.pdf; [4] tutte le immagini relative a brevetti sono tratte dal sito www.freepatentsonline.com http://automotive.ing.unibs.it 10 [email protected]
Scaricare