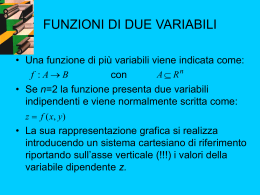
Minimizzazione dell’energia (Ottimizzazione) Abbiamo visto che un sistema molecolare di N atomi può essere descritto da 3N coordinate cartesiane. Se invece usiamo le coordinate interne ci sono sei coordinate (cinque per le molecole lineari) indipendenti che corrispondono alla rotazione e alla traslazione della molecola mentre le altre definiscono la configurazione e la struttura interna (i movimenti degli atomi). Per un sistema con N atomi, l’energia è quindi una funzione di 3N–6 coordinate interne o di 3N coordinate cartesiane. Sia che si usino i metodi della meccanica quantistica o quelli della meccanica molecolare viene calcolata l'energia potenziale di una delle tante configurazioni della molecola (calcolo a singolo punto o single point). Nasce quindi la questione di determinare quale sia la geometria, fra tutte le conformazioni possibili, corrispondente all’energia più bassa, cioè la geometria più stabile. Gli arrangiamenti degli atomi di energia minima corrispondono a stati stabili del sistema, ogni spostamento da un minimo dà una configurazione con energia più elevata. Superfici di energia potenziale Nel caso più semplice, cioè quello di una molecola biatomica, l’energia potenziale varia al variare della distanza: Questa è una minimizzazione uni-dimensionale: l’energia dipende solo da una coordinata, la distanza di legame r Superfici di energia potenziale Per sistemi con un maggior numero di atomi l’energia potenziale è una funzione multidimensionale delle coordinate. Per esempio l’energia di una conformazione dell’etano è funzione di 18 coordinate interne (o di 24 coordinate cartesiane) che sono richieste per specificarne completamente la struttura. 2 H5 H1 H4 1.5 C2 C1 1 H6 0.5 H3 H2 -150 -100 -50 50 100 150 La maniera in cui varia l’energia in funzione delle coordinate è generalmente indicata come superficie di energia potenziale (o ipersuperficie). Superfici di energia potenziale E’ impossibile visualizzare l’intera superficie di energia potenziale, tranne che in casi molto semplici in cui l’energia è funzione di solo una o due coordinate. Lisozima T4, 1328 atomi circa Superficie di energia molto complicata. Ipersuperficie 3984-dimensionale!! Si parla di superficie di energia potenziale non solo in sistemi in cui i legami rimangono inalterati (come negli esempi visti), ma anche quando si ha la rottura o formazione di legami (reazioni chimiche). Superfici di energia potenziale Nel molecular modelling siamo interessati nei punti di minimo del’energia potenziale. Tali punti corrispondono infatti a stati stabili del sistema. Ci possono essere molti punti di minimo sulla superficie. Il minimo con l’energia più bassa in assoluto è chiamato punto di minimo globale. Superfici di energia potenziale Punti di interesse in una superficie di energia potenziale Superfici di energia potenziale Punti di sella (saddle points) Superfici di energia potenziale Ricerca del minimo (minimizzazione o ottimizzazione) Quello della ricerca di un algoritmo di minimizzazione efficace è un problema molto noto in matematica. Nei casi complessi per determinare i minimi sulla superficie di energia potenziale in genere si ricorre ad algoritmi matematici basati su metodi numerici. C’è una vasta letteratura su questi metodi, qui ci soffermeremo su quegli approcci più comunemente usati in meccanica molecolare. Collegate alla questione della ricerca del minimo sono le risposte alle seguenti domande: Quale conformazione corrisponde al minimo globale? Quali conformazioni sono presenti nei punti di minimo locale? Quali variazioni nella struttura della molecola avvengono quando si passa da un minimo all’altro? Quale è la conformazione dello stato di transizione che collega due minimi? Superfici di energia potenziale Punti stazionari Sia i punti di minimo che i punti di sella sono punti stazionari. Un punto stazionario è definito come un punto sulla superficie di energia potenziale in cui la derivata dell'energia rispetto a tutte le coordinate è zero. V ( r ) 0 r Superfici di energia potenziale Punti di minimo Un punto di minimo oltre ad avere le derivate prime rispetto a tutte le coordinate uguali a zero deve avere tutte le derivate seconde positive. V 0; ri 2V 0 2 ri Quest'ultima condizione corrisponde ad avere la curvatura della superficie tutta “all'insù” Superfici di energia potenziale Punti di sella Un punto di sella oltre ad avere le derivate prime rispetto a tutte le coordinate uguali a zero deve avere tutte le derivate seconde positive tranne che in una direzione. Definizione rigorosa: i punti di sella sono punti stazionari con uno ed un unico autovalore negativo della matrice Hessiana (matrice delle derivate seconde). Quest'ultima condizione corrisponde ad avere la curvatura della superficie tutta “all'insù” tranne che in una direzione. Superfici di energia potenziale Punti di sella I punti di sella connettono due minimi attraverso il cammino di minima energia. Ricerca dei punti di minimo In termini matematici il problema è dunque quello di minimizzare una funzione -appunto l’energia- di più variabili -le coordinate interne degli atomi. Qualora l’energia di un sistema di particelle possa essere rappresentata da una funzione analitica, il minimo può essere trovato con metodi di calcolo standard. Questo non è però generalmente possibile per sistemi molecolari complicati nei quali l’energia varia con le coordinate in maniera complessa. In questi casi i minimi sono localizzati usando metodi numerici nei quali le coordinate vengono variate gradualmente producendo configurazioni con energie sempre più basse fino al raggiungimento del minimo. Scelta dell'algoritmo. Ci sono molti fattori che determinano la scelta dell'algoritmo più appropriato per un dato problema: - veloce Poche iterazioni ? Poche valutazioni di V(r)? - robusto - che richiede poca memoria Algoritmi di minimizzazione Algoritmi di minimizzazione Si possono classificare gli algoritmi di minimizzazione in due gruppi: 1) quelli che non usano le derivate dell’energia rispetto alle coordinate Esempio: N.B.: - Direzione - Passo (step) Punto di confronto Algoritmi di minimizzazione Algoritmi di minimizzazione Si possono classificare gli algoritmi di minimizzazione in due gruppi: 1) quelli che non usano le derivate dell’energia rispetto alle coordinate 2) quelli che usano le derivate dell’energia rispetto alle coordinate. Esempio: E ( r ) r N.B.: - Direzione - Passo (step) Algoritmi di minimizzazione Algoritmi di minimizzazione Molti algoritmi di minimizzazione possono solo andare in discesa lungo la superficie di energia e quindi riescono solo a localizzare il minimo più vicino al punto d’inizio (quindi un minimo locale). Per localizzare più di un minimo o per localizzare l’energia minima globale sono richiesti metodi che permettano di partire da differenti geometrie iniziali, ognuna delle quali viene poi minimizzato. Si confronta poi l'energia corrispondente ai vari minimi locali. start start minimo locale minimo globale Algoritmi di minimizzazione Minimizzazione senza l'uso di derivate: metodo del simplesso (simplex) Non è molto efficiente, ma le derivate non sono richieste ed è piuttosto robusto. Il simplesso è una figura geometrica che, in N dimensioni, consiste in N+1 punti (vertici) interconnessi e nelle rispettive linee, o facce poligonali che li interconnettono. In due dimensioni abbiamo un triangolo In tre dimensioni abbiamo un tetraedro 2 D 3 D Algoritmi di minimizzazione Minimizzazione senza l'uso di derivate: metodo del simplesso (simplex) Si parte con N+1 posizioni (set di coordinate) che definiscono il simplesso iniziale. Consideriamo una minimizzazione bidimensionale. Partiamo in tutto da tre posizioni iniziali in corrispondenza alle quali calcoliamo il valore dell'energia. A questo punto si inizia a far muovere il simplesso. Ci possono essere vari tipi di mosse: 1. riflessione del vertice con il valore più alto rispetto al lato opposto 2. riflessione ed allontanamento rispetto al vertice con il valore più alto 3. contrazione lungo la dimensione del punto con il valore più alto alto basso alto basso Algoritmi di minimizzazione Minimizzazione senza l'uso di derivate: metodo del simplesso (simplex) Dopo queste mosse ci ritroviamo vicino ad un minimo e quindi: 4. il simplesso si contrae in tutte le dimensioni verso il punto più basso alto Un'appropriata sequenza di queste 4 mosse porta sempre a convergenza basso Algoritmi di minimizzazione CONFORMAZIONE 2 Atomo X Y 1 x21 y21 2 x22 y22 3 x23 y23 . . . . . . n x2n y2n CONFORMAZIONE 1 Atomo X Y 1 x11 y11 2 x12 y12 3 x13 y13 . . . . . . n x1n y1n CONFORMAZIONE 3 Atomo X Y 1 x31 y31 2 x32 y32 3 x33 y33 . . . . . . n x3n y3n Algoritmi di minimizzazione Metodo del simplesso: considerazioni generali -perchè N+1 vertici per N coordinate? -come si generano i punti di partenza? -quando è vantaggioso da usare? Algoritmi di minimizzazione Criteri di Convergenza A differenza di quello che succede con le funzioni analitiche nelle applicazioni “reali” di molecular modelling è possibile identificare l'esatta posizione dei minimi solo raramente, possiamo solo sperare di raggiungere una buona approssimazione. E' necessario quindi avere dei criteri per decidere quando il calcolo di minimizzazione è sufficientemente vicino ad un minimo in modo da poter essere terminato. Ogni calcolo è ovviamente limitato dalla precisione con cui vengono immagazzinati i numeri, ma nella maggior parte dei casi ci si ferma ben prima di questo limite. Ci sono vari criteri tra cui scegliere (o applicare quello che si verifica per primo). Ci si ferma quando: - si raggiunge un massimo numero di iterazioni - quando la differenza di energia tra due passi successivi è minore di una certa tolleranza - quando il passo (cioè la differenza tra due configurazioni successive) è piccola. Algoritmi di minimizzazione Scelta del punto di partenza Dipende da quello che vogliamo ottenere: Se vogliamo ottenere la struttura di minima energia (minimo globale) conviene partire da una struttura che probabilmente è già vicina a quel minimo: - es. struttura a raggi X (dai database) - se vogliamo utilizzare i metodi della meccanica quantistica (più pesanti) ci conviene partire da una struttura già minimizzata con i metodi della meccanica molecolare. Se vogliamo la geometria di tutte le strutture a bassa energia (più minimi locali) allora possiamo partire da diverse strutture casuali (“random”). (E' del tutto vero?) Algoritmi di minimizzazione Minimizzazione con l'uso di derivate Le derivate danno informazioni riguardo la forma della superficie di energia potenziale e se ben usate possono aumentare in maniera significativa l’efficienza nella localizzazione del minimo. Pertanto esse, qualora siano disponibili, vengono impiegate dai più comuni metodi di minimizzazione. La direzione della derivata prima dell’energia (il gradiente) indica dove abbiamo un minimo visto che la grandezza del gradiente è relazionata alla pendenza della curva. Poiché la forza cui è sottoposto un atomo è uguale al gradiente cambiato di segno, l’energia del sistema può essere abbassata dal movimento di ciascun atomo in risposta all’azione della forza agente su di esso. La derivata seconda indica la curvatura della funzione, e può essere usata per predire dove la funzione cambierà direzione. Per usare questo tipo di metodi è ovviamente necessario poter calcolare le derivate dell’energia rispetto alle variabili. Algoritmi di minimizzazione Minimizzazione con l'uso di derivate Le derivate possono essere ottenute analiticamente o numericamente. L’uso di derivate analitiche è preferibile perché sono esatte ed in più possono essere calcolate più velocemente. In alcuni casi può essere più efficace un algoritmo di minimizzazione non basato sulle derivate che fare ricorso a derivate numeriche I metodi di minimizzazione che utilizzano le derivate possono essere classificati secondo il più alto ordine delle derivate impiegate. Metodi del primo ordine usano le derivate prime (cioè i gradienti) mentre metodi del secondo ordine sfruttano derivate sia prime che seconde. Algoritmi di minimizzazione Minimizzazione con l'uso di derivate: metodo “steepest descent” Nel metodo “steepest descent” ci si muove nella direzione parallela alla forza netta, che equivale a muoversi in linea retta per la discesa. Il punto d’inizio per ogni iterazione k è la configurazione molecolare ottenuta dal passaggio precedente che è rappresentata da un vettore multidimensionale xk-1 che contiene le coordinate di tutti gli atomi del sistema. Per la prima iterazione il punto di partenza è la configurazione iniziale del sistema, il vettore x1 che è fornito dall’utente. La direzione dello spostamento dal punto iniziale è dunque definita dal gradiente gk ed è data da un vettore unitario 3N-dimensionale (in coordinate cartesiane) sk: gk sk gk Algoritmi di minimizzazione Minimizzazione con l'uso di derivate: metodo “steepest descent” Dopo aver definito la direzione lungo la quale muoversi occorre decidere quanto muoversi lungo il gradiente. Ci sono due metodi: - line search: nella direzione del gradiente si trova il punto di minimo (in pratica si minimizza in una dimensione) V V V V , , xi yi z i Algoritmi di minimizzazione Minimizzazione con l'uso di derivate: metodo “steepest descent” Secondo metodo: - si possono considerare step arbitrari: si aumenta lo step finchè le iterazioni provocano una diminuzione dell’energia. Quando uno step produce un aumento di energia si assume che l’algoritmo abbia saltato la valle che contiene il minimo. La lunghezza dello step è allora ridotta in modo da poter identificare il minimo stesso. Algoritmi di minimizzazione Problemi nell’uso del metodo “steepest descent” La ricerca del minimo avviene ad ogni passo lungo una direzione che è perpendicolare alla precedente e quindi l'approccio al minimo assume un carattere oscillatorio che diviene piuttosto inefficiente soprattutto in “valli” di energia strette e in prossimità del minimo in quanto l’iterazione successiva tende ad annullare il guadagno ottenuto con la precedente. La minimizzazione procede rapidamente quando la geometria della molecola è lontana dal punto di arrivo ma procede lentamente (molte iterazioni) alla fine. Algoritmi di minimizzazione Minimizzazione con l'uso di derivate: metodo “conjugate gradient” Il metodo “conjugate gradient” produce un insieme di direzioni che non mostra il comportamento oscillatorio del metodo “steepest descent”. Il metodo conjugate gradient usa un algoritmo che produce una serie di line search con direzioni mutuamente coniugate così che ad ogni successivo step si ha un raffinamento della direzione verso il minimo. Questo sistema comporta che il gradiente successivo è ortogonale a tutti i precedenti gradienti e che la nuova direzione è coniugata alle precedenti e non ortogonale come nello steepest descent. Algoritmi di minimizzazione Minimizzazione con l'uso di derivate: metodo al secondo ordine Sono i metodi che fanno uso di derivate seconde (matrice Hessiana), oltre alle derivate prime. Le derivate seconde danno informazioni sulla curvatura della superficie. Tra questi metodi ricordiamo il Newton-Raphson e varianti su questo metodo, che introducono semplificazioni nel calcolo della matrice Hessiana. Sono metodi in genere molto veloci, a volte possono essere instabili lontano dal punto di minimo. Algoritmi di minimizzazione Scelta della minimizzazione E’ dettata da un numero di fattori, compresi il peso e il tempo computazionale, le velocità relative con cui le varie parti del calcolo devono essere effettuate, la disponibillità delle derivate analitiche e la robustezza del metodo. - Metodi per sistemi molto grandi, generalmente si applica la meccanica molecolare (Conjugate gradient) - Metodi per sistemi di media grandezza, in cui si può anche usare la meccanica quantistica (Metodi con derivate seconde, NR, ecc) Si possono anche usare metodi più lenti ma più robusti lontano dal minimo e poi passare a metodi più veloci. Algoritmi di minimizzazione Applicazioni della minimizzazione - per trovare il minimo globale - per preparare il sistema per altre simulazioni: • rilassare le conformazioni ad energia più alta • avere una geometria di partenza buona - ricerca conformazionale (conformational search) - analisi dei modi normali della molecola
Scaricare