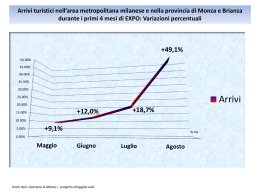
GNGTS – Atti del 22° Convegno Nazionale / 13.02 G. Böhm, L. Petronio e S. Picotti Istituto Nazionale di Oceanografia e di Geofisica Sperimentale (OGS) TOMOGRAFIA 3D DEI PRIMI ARRIVI IN UN CASO REALE Questo lavoro presenta l’applicazione dell’inversione tomografica dei primi arrivi per la stima del campo di velocità superficiale in un’area caratterizzata da una severa topografia e da una forte variazione laterale di velocità, dove i metodi a rifrazione convenzionali generalmente falliscono. Il tipo di tomografia considerata in questa analisi inverte i primi arrivi, che possono essere associati alle onde dirette e/o rifratte, che si propagano di solito lungo dei percorsi curvi a causa della presenza di un gradiente di velocità positivo verso il basso. L’inversione di questi arrivi ha un enorme vantaggio, sia in fase interpretativa che nell’inversione vera e propria: non hanno bisogno di essere associati ad alcun orizzonte, cosa che comporterebbe, oltre ad una difficoltà nel riconoscimento dell’evento corrispondente (in fase di picking), alla necessità anche di stimare la profondità delle superfici associate (incognite in più). Inoltre, questi eventi, in generale, tendono ad essere più visibili (e più puliti) degli arrivi riflessi e rifratti (head wave); un grande vantaggio soprattutto per gli automatismi nei programmi di picking. D’altra parte c’è una grossa difficoltà nell’invertire questo tipo di dati: hanno bisogno di un modello iniziale preciso e, comunque, con velocità crescenti verso il basso; altrimenti, in fase di tracciamento dei raggi, si otterranno dei segmenti rettilinei senza raggiungere mai le curvature proprie per questo tipo di arrivi. Per questa ragione, inoltre, si deve usare sempre un tracciamento curvo dei raggi, anche per le prime iterazioni tomografiche. Fig. 1 - Tracciamento dei raggi usati nell’inversione (a sinistra) e mappa della geometria d’acquisizione (a destra). Il caso reale che è stato analizzato riguarda una zona degli Appennini Meridionali. L’area investigata, posta attorno ad un pozzo, è caratterizzata da una situazione geo-strutturale abbastanza complessa (presenza di una zona argillosa nella parte centrale e ad est di calcari ad alta velocità immergenti verso ovest, più un sistema di faglie NO-SE) e da una topografia molto variabile. I tempi d’arrivo utilizzati per l’inversione sono stati ottenuti da singoli profili a rifrazione 2D più le registrazioni a copertura 3D da vibroseis: ciascun profilo è stato GNGTS – Atti del 22° Convegno Nazionale / 13.02 messo in corrispondenza dei canali seisbit posti a raggiera attorno al pozzo; tutti i geofoni hanno poi registrato i segnali di ciascun vibroseis, ottenendo una copertura 3D quasi completa (i geofoni più lontani, rispetto alla corrispondente sorgente, non hanno però sempre registrato segnali visibili). L’inversione è stata calcolata utilizzando il software tomografico Cat3d, sviluppato dal nostro gruppo di ricerca, che ha usato in questo caso la procedura d’inversione basata sul metodo delle griglie sfalsate (Vesnaver e Böhm, 2000). Inoltre, prima d’ invertire i tempi d’arrivo, è stato fatto un test sull’attendibilità del picking stesso, togliendo gli eventi con velocità apparente anomala (Vapp = offset/time). Per il modello iniziale, che in questo tipo di tomografia è di fondamentale importanza, è stata utilizzata una procedura automatica, basata sull’analisi degli arrivi nel dominio τ-p, con cui sono state calcolate delle funzioni di velocità-profondità, che, attraverso un interpolatore e con successive fasi di raffinamento, sono state poi utilizzate per definire il modello iniziale. Il modello usato per l’inversione copre un’area di 5x5 km ed è definito da 14 strati paralleli alla topografia, ciascuno discretizzato con una griglia regolare di 30x30 pixels. Il modello finale ottenuto dall’inversione tomografica è rappresentato in Fig. 2 attraverso un taglio del cubo dell’area investigata (a destra). A sinistra della stessa figura è riportata, invece, la sezione verticale del campo di velocità finale, corrispondente alla linea tratteggiata in Fig. 1. Entrambe le figure evidenziano la presenza di due strutture ad alta velocità allineate nella direzione NE-SO attorno alla zona di bassa velocità posta in corrispondenza del pozzo. Quest’analisi ha avuto, inoltre, lo scopo, non secondario, di utilizzare il campo di velocità risultante come modello iniziale per una successiva indagine tomografica relativa agli arrivi diretti di dati SWD (Seismic While Drilling). Fig. 2 - Risultato dell’inversione tomografica del modello 3D: una sezione verticale (a sinistra) ed un taglio del cubo completo (a destra). Ringraziamenti. Si ringrazia l’Eni per aver permesso la pubblicazione dei dati ed il gruppo Seisbit® dell’OGS per il picking dei dati. GNGTS – Atti del 22° Convegno Nazionale / 13.02 BIBLIOGRAFIA Böhm G., Rossi G. e Vesnaver A., 1999. Minimum time ray-tracing for 3-D irregular grids, Journal of Seismic Exploration, 8: 117-131. Vesnaver A. e Böhm G., 2000. Staggered or adapted grids for seismic tomography? The Leading Edge, 9, 944-950.
Scaricare