☰
Esplorare
registrati
Iscriviti
Caricare
×
Scaricare
senza categoria
Note sugli spazi proiettivi
Forze
Consideriamo una retta a in un piano.
presentazione (Power Point)
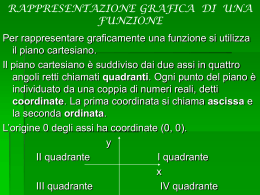
Rappresentazione grafica di una funzione
scheda dati per la pubblicazione sul portale web
direzione
PROSPETTO RETTE e COSTI - Liceo Salesiano Valsalice
La retta (powerpoint)
Il birapporto