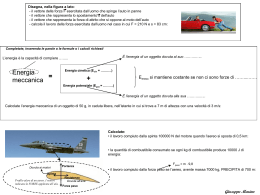
POLITECNICO DI MILANO Meccanica dei Fluidi 1. Introduzione A cura di: Dalila Vescovi, Diego Berzi v2.6 Indice 1 Richiami di analisi tensoriale 1.1 Campi scalari, vettoriali e tensoriali 1.2 Operazioni tra vettori e tensori . . . 1.3 Operatore nabla . . . . . . . . . . . 1.4 Teoremi . . . . . . . . . . . . . . . . 1.5 Momento meccanico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 3 7 8 10 12 2 Proprietà dei fluidi 13 2.1 Grandezze fondamentali e unità di misura . . . . . . . . . . . 13 2.2 Fluido come mezzo continuo . . . . . . . . . . . . . . . . . . . 13 2.3 Proprietà dei fluidi . . . . . . . . . . . . . . . . . . . . . . . . 14 2 1 1.1 Richiami di analisi tensoriale Campi scalari, vettoriali e tensoriali Consideriamo un sistema di coordinate spaziali cartesiane ortogonali. Le grandezze che verranno prese in considerazione possono essere campi scalari, vettoriali o tensoriali. Campo scalare Un campo scalare è una funzione che varia nello spazio e nel tempo e il cui argomento è uno scalare. a = a(x, y, z, t). Fissato un generico punto dello spazio (x, y, z) e un generico istante temporale t, la grandezza a è rappresentata da uno scalare (ovvero da un numero). Campo vettoriale Un campo vettoriale è una funzione che varia nello spazio e nel tempo e il cui argomento è un vettore. a = a(x, y, z, t). Fissato un generico punto dello spazio (x, y, z) e un generico istante temporale t, la grandezza a è rappresentata da un vettore. Nel sistema di riferimento cartesiano, un vettore può essere rappresentato mediante le sue componenti scalari lungo i tre assi (Fig. 1) z az a ay ax y x Figura 1: Vettore nel piano cartesiano. a = (ax , ay , az ) . La terna di riferimento x, y, z può equivalentemente essere rappresentata come x1 , x2 , x3 , per cui il vettore a può essere espresso alternativamente anche come a = (a1 , a2 , a3 ) . 3 Introducendo i versori dei tre assi: î = (1, 0, 0) ĵ = (0, 1, 0) k̂ = (0, 0, 1) versore dell’asse x, versore dell’asse y, versore dell’asse z, il generico vettore a può essere espresso anche come a = ax î + ay ĵ + az k̂, o anche a = a1 î + a2 ĵ + a3 k̂. Per comodità e brevità di scrittura è oppurtono introdurre la notazione indiciale. Secondo questa convenzione, gli enti matematici vengono rappresentati con dei pedici che prendono il nome di indici. Utilizzando la notazione indiciale, la generica componente del vettore a viene indicata come ai , dove i è l’indice e può assumere i valori 1, 2 e 3 (o, in modo del tutto equivalente, x, y e z). In notazione indiciale si adotta la convenzione secondo la quale i termini con indici ripetuti si intendono sommati (convenzione di Einstein), per cui, per esempio: 3 X ai bi = a1 b1 + a2 b2 + a3 b3 . a i bi = i=1 Anche i versori dei tre assi vengono espressi con tale notazione come îi , con i = 1, 2, 3, dove evidentemente î1 = î, î2 = ĵ, î3 = k̂. Allora la scrittura compatta ai esprime la componente scalare di a nella direzione îi , e il vettore a è definito come a = ai îi 3 X ai îi = a1 î1 + a2 î2 + a3 î3 = i=1 = ax î + ay ĵ + az k̂. Tornando alla definizione di vettore, questo è definito da direzione, modulo e verso. Il modulo di un vettore a rappresenta la sua lunghezza ed è dato da √ |a| = a = ai ai q = a2x + a2y + a2z . La direzione è individuata dalla retta su cui giace il vettore. Consideriamo per comodità il caso piano di Fig. 2. In questo caso α = arctan 4 ay ax y ay a α ax x Figura 2: Direzione di un vettore. è l’angolo che la direzione del vettore a forma con il semiasse positivo delle ascisse. Il verso rappresenta l’orientamento del vettore e dipende dal segno delle sue componenti. Se la componente ax è positiva, ad esempio, allora a ha verso concorde con l’asse x. Dato un campo vettoriale a = a(x, y, z, t), tutte le sue componenti sono funzioni scalari che variano nello spazio e nel tempo: a = ax (x, y, z, t)î + ay (x, y, z, t)ĵ + az (x, y, z, t)k̂. Viceversa, una terna di campi scalari (ax , ay , az ) definisce le componenti scalari di un campo vettoriale solo se alla direzione individuata dal versore n̂ = nx î + ny ĵ + nz k̂ è associata la componente scalare a n = ni ai = nx a x + ny ay + nz a z . Campo tensoriale Un campo tensoriale è una funzione che varia nello spazio e nel tempo e il cui argomento è un tensore. a = a(x, y, z, t). Fissato un generico punto dello spazio (x, y, z) e un generico istante temporale t, la grandezza a è rappresentata da un tensore. In generale un tensore di ordine n è un ente matematico descritto da 3n componenti. Quindi un tensore di ordine 0 è rappresentato da 30 = 1 componenti, cioè è uno scalare; un tensore di ordine 1 è rappresentato da 31 = 3 componenti, cioè è un vettore; un tensore di ordine 2 (che è quello che ci interessa nell’ambito di questo corso) è rappresentato da 32 = 9 componenti, ovvero è una matrice 3 × 3. In questa dispensa, con il termine tensore si farà 5 riferimento sempre ad un tensore di viene rappresentato come axx a = ayx azx ordine 2. Per cui, il generico tensore a axy axz ayy ayz . azy azz Il generico elemento del tensore a viene espresso in notazione indiciale come aij con i, j = 1, 2, 3 (o anche i, j = x, y, z). Dato un campo tensoriale a = a(x, y, z, t), allora tutte le sue componenti sono funzioni scalari che variano nello spazio e nel tempo. Inoltre, le tre righe della matrice rappresentano le tre componenti vettoriali ax , ay , az del campo tensoriale a: ai = aij îj = (aix , aiy , aiz ) . Viceversa, una terna di campi vettoriali ax , ay , az definisce le componenti vettoriali di un campo tensoriale solo se alla direzione individuata dal versore n̂ = nx î + ny ĵ + nz k̂ è associato il vettore an = n i ai = nx ax + ny ay + nz az . 6 1.2 Operazioni tra vettori e tensori Prodotto scalare tra due vettori Il prodotto scalare di due vettori, a = (ax , ay , az ) e b = (bx , by , bz ), indicato con a · b, è lo scalare definito da a · b = a i bi = a x bx + a y by + a z bz . Il prodotto scalare soddisfa le seguenti proprietà: • a · b = b · a (simmetria) • a · b = 0 ⇐⇒ ortogonali) a⊥b (il prodotto scalare è nullo se i vettori sono • a · îi = ai . Il prodotto scalare di un vettore per sé stesso, a · a = ai ai = a2x + a2y + a2z = a2 , risulta pari al quadrato del modulo del vettore stesso. Prodotto misto tra un vettore e un tensore Il prodotto misto tra un vettore, a, e vettore definito da bxx a · b = ax ay az · byx bzx un tensore, b, indicato con a · b, è il bxy bxz byy byz bzy bzz = ai bij îj = (ax bxx + ay byx + az bzx ) î + (ax bxy + ay byy + az bzy ) ĵ+ + (ax bxz + ay byz + az bzz ) k̂. Prodotto vettoriale tra due vettori Il prodotto vettoriale di due vettori, a = (ax , ay , az ) e b = (bx , by , bz ), indicato con a × b, è il vettore definito da î ĵ k̂ a × b = ax ay az bx by bz = (ay bz − az by ) î + (az bx − ax bz ) ĵ + (ax by − ay bx ) k̂ dove |·| denota il determinante della matrice. 7 Prodotto tensoriale tra due vettori Il prodotto tensoriale di due vettori, a = (ax , ay , az ) e b = (bx , by , bz ), indicato semplicemente con ab, è il tensore definito da ax ab = ay bx by bz az ax bx ax by ax bz = a y bx a y by a z bx a z by a y bz . az bz La generica componente scalare di ab si denota come ab ij = ai bj . 1.3 Operatore nabla L’operatore differenziale vettoriale nabla, ∇, è definito come un vettore che ha per componenti gli operatori di derivata parziale lungo le tre direzioni: ∂ ∇= îi ∂xi ∂ ∂ ∂ î + ĵ + k̂ = ∂x ∂y ∂z ∂ ∂ ∂ , , . = ∂x ∂y ∂z L’operatore nabla consente di scrivere in forma compatta alcuni operatori differenziali, quali il gradiente, la divergenza e il rotore. Gradiente di un campo scalare Dato un campo scalare a = a(x, y, z, t) continuo e differenziabile nello spazio, si definisce gradiente di a il seguente campo vettoriale ∂a grad a = ∇a = îi ∂xi ∂a ∂a ∂a î + ĵ + k̂ = ∂x ∂y ∂z ∂a ∂a ∂a , , . = ∂x ∂y ∂z In notazione indiciale la generica componente scalare di ∇a si denota come ∂a (∇a)i = . ∂xi 8 Gradiente di un campo vettoriale Dato un campo vettoriale a = a(x, y, z, t) continuo e differenziabile nello spazio, si definisce gradiente di a il seguente campo tensoriale ∂ ∂x ∂ grad a = ∇a = ax ay az ∂y ∂ ∂z = ∂ax ∂x ∂ax ∂y ∂ax ∂z ∂ay ∂x ∂ay ∂y ∂ay ∂z ∂az ∂x ∂az ∂y ∂az ∂z . La generica componente scalare di ∇a si denota come (∇a)ij = ∂aj . ∂xi Divergenza di un campo vettoriale Dato un campo vettoriale a = a(x, y, z, t) continuo e differenziabile nello spazio, si definisce divergenza di a il seguente campo scalare ∂ai ∂xi ∂ax ∂ay ∂az = + + . ∂x ∂y ∂z div a = ∇ · a = Si noti che il punto · rappresenta l’operazione di prodotto scalare tra il vettore nabla e il vettore a. 9 Divergenza di un campo tensoriale Dato un campo tensoriale a = a(x, y, z, t) continuo e differenziabile nello spazio, si definisce divergenza di a il seguente campo vettoriale ∂ai ∂xi ∂ax ∂ay ∂az = + + ∂x ∂y ∂z ∂aij îj = ∂x i ∂axy ∂ayy ∂azy ∂axx ∂ayx ∂azx = î + ĵ+ + + + + ∂x ∂y ∂z ∂x ∂y ∂z ∂ayz ∂axz ∂azz + k̂. + + ∂x ∂y ∂z div a = ∇ · a = La generica componente scalare di ∇ · a si denota come ∇·a j = ∂aij . ∂xi Rotore di un campo vettoriale Dato un campo vettoriale a = a(x, y, z, t) continuo e differenziabile nello spazio, si definisce rotore di a il seguente campo vettoriale î ĵ k̂ ∂ ∂ ∂ rot a = ∇ × a = . ∂x ∂y ∂z ax ay az Il simbolo × denota il prodotto vettoriale tra il vettore nabla e il vettore a. 1.4 Teoremi Siano W una regione generica (un volume) delimitata dalla sua frontiera A (superficie che racchiude il volume W ), e n̂ il versore entrante a A. Siano inoltre a e a un campo vettoriale e un campo scalare, rispettivamente, continui e differenziabili. Allora valgono i seguenti teoremi. Teorema della divergenza Z W ∇ · a dW = Z W ∂ai dW = − ∂xi 10 Z A ai ni dA = − Z A a · n̂ dA. (1) Teorema del gradiente Z W ∇a dW = Z W ∂a îi dW = − ∂xi 11 Z A a ni îi dA = − Z an̂ dA. A (2) 1.5 Momento meccanico Si definisce momento meccanico di una forza F rispetto al generico polo O il vettore M = b × F, in cui b rappresenta il vettore posizione di qualsiasi punto giacente sulla retta di applicazione di F rispetto al polo stesso. y θ F b b sinθ O + x Figura 3: Momento meccanico. Considerando per semplicità il caso piano (dove cioè F e b sono complanari e giacciono sul piano x − y), Fig. 3, allora: M = (0, 0, Mz ) = Mz k̂ dove Mz = b F sin θ, dove θ è l’angolo tra i due vettori. M è dunque diretto lungo l’asse z (ovvero è ortogonale al piano su cui giacciono i vettori F e b), e b sin θ rappresenta il braccio di F rispetto al polo O ed è pari alla distanza tra O e la retta di applicazione di F. Inoltre, fissata una convenzione per le rotazioni positive (in figura si sono assunte positive le rotazioni antiorarie), il segno di Mz è positivo se la rotazione generata dal vettore rispetto al polo è concorde con la convenzione scelta, negativo altrimenti. Per esempio, con riferimento alla Fig. 3, Mz è negativo, quindi M è discorde con l’asse z. 12 2 Proprietà dei fluidi 2.1 Grandezze fondamentali e unità di misura Tabella 1: Grandezze fondamentali e unità di misura. Grandezze fondamentali Lunghezza [L] Tempo [t] [M ] Massa Temperatura [T ] Unità di di misura m s kg K (◦ C) In Cinematica le grandezze fondamentali sono: [L] e [t]; In Dinamica le grandezze fondamentali sono: [L], [t] e [M ]; In Termodinamica le grandezze fondamentali sono: [L], [t], [M ] e [T ]. 2.2 Fluido come mezzo continuo Mezzo continuo: • approccio fisico: mezzo nel quale non si possono scorgere vacanze; • approccio matematico: in ogni punto del mezzo è possibile definire le grandezze mediante funzioni continue. Dato un volume di fluido, si distinguono due tipi di forze: • forze di volume Fv : proporzionali al volume di fluido contenuta nel volume (per esempio la forza di gravità). Dal momento che il volume e la massa sono legati attraverso la densità (si veda il Par. 2.3), sono anche proporzionali alla massa del fluido e possono essere equivalentemente definite forze di massa; • forze di superficie Fs : forze che vengono esercitate su una qualsiasi parte del sistema attraverso la sua superficie di contorno. Un sistema continuo è in equilibrio quando: X X Fv + Fs = ma, dove m è la massa del sistema e a la sua accelerazione. Consideriamo una porzione infinitesima di superficie dA appartenente ad un volume di fluido. Su questa agisce una forza infinitesima (di superficie) dFs . Si definisce sforzo unitario: dFs = Φn dA−→0 dA lim 13 N 1 [F ] [M ] [L] · L’unità di misura dello sforzo è: Φn → 2 2 → 2 → m2 . La [t] [L] [L] spinta elementare su dA è, dunque, esprimibile come dFs = Φn dA. Si può, allora, calcolare la forza di superficie agente su una superficie finita A come Z Fs = Φn dA. A Rispetto alla giacitura di dA, di normale n̂, è possibile scomporre lo sforzo in una componente normale σ ed una tangenziale τ (Fig. 4). La componente normale σ può essere di compressione o di trazione. Per convenzione, in meccanica dei fluidi, si assumono positivi gli sforzi normali di compressione. La maggior parte dei fluidi in condizioni usuali non sopporta sforzi normali di trazione. La componente isotropa (che non dipende dall’orientamento della superficie) degli sforzi normali viene chiamata pressione (Statica dei Fluidi, Par. 1.1). Φn τ σ dA n Figura 4: Componente normale e tangenziale dello sforzo su dA. 2.3 Proprietà dei fluidi Le proprietà dei fluidi si possono classificare in • Intensive: non dipendono dalle dimensioni del sistema, e in particolare dal volume. Ad esempio, sono grandezze intensive la temperatura, la densità, la viscosità. • Estensive: dipendono dalle dimensioni del sistema. La massa è una proprietà estensiva. 14 Densità La densità è la massa per unità di volume: ρ→ [M ] kg 3 → m3 [L] Per l’acqua, ρ = 1000 kg/m3 ; per l’aria a temperatura ambiente, ρ = 1.29 kg/m3 . La densità è funzione di temperatura e pressione. La legge che lega queste tre grandezze è detta equazione di stato del fluido e in generale si esprime come ρ = ρ(p, T ). Per un liquido, la densità varia poco con la pressione e diminuisce all’aumentare della temperatura. Caso particolare è l’acqua, per cui la massima densità viene raggiunta a 4◦ C. Figura 5: Andamento della densità con la temperatura per l’acqua. Per un gas perfetto, l’equazione di stato è data da pW = nRT dove: W è il volume, n il numero di moli contenuto nel volume, R = 8.314472 J/(mol K) la costante universale dei gas e T la temperatura espressa in gradi Kelvin. M dove M è la massa contenuta nel Il numero di moli è dato da n = Mmolare volume e Mmolare è la massa di una mole. 15 Quindi, essendo ρ = M , W ρ= pMmolare . RT Peso specifico Il peso specifico è il peso per unità di volume N F → 3 γ = ρg → 3 L m Per l’acqua, γ = 9810 N/m3 ; per l’aria a temperatura ambiente, γ = 12.68 N/m3 . Comprimibilità La comprimibilità è la proprietà di un fluido di modificare il proprio volume (e quindi la propria densità) al variare della pressione a cui è soggetto. Consideriamo un fluido, soggeto ad una pressione p, che occupa un volume W (Fig. 6). Figura 6: Volume di fluido soggetto ad una pressione p. In condizioni isoterme (T = cost), sperimentalmente si osserva che ad una variazione di pressione dp, corrisponde una variazione di volume dW , secondo la legge: dp dW =− (3) W ε dove ε [N/m2 ] è il modulo di elasticità a compressione cubica. La conservazione della massa implica che: ρW = cost; differenziando si ottiene dW dρ ρdW + W dρ = 0 =⇒ =− , W ρ 16 da cui segue che ad una variazione di pressione corrisponde una variazione di densità: dp dρ = (4) ρ ε Nei liquidi ε è molto grande, per cui la densità si mantiene circa costante al variare della pressione: ε elevato =⇒ dρ ∼ = 0 =⇒ ρ = cost. Il modulo di elasticità a compressione cubica dell’acqua a 10◦ C è pari a εw (T = 10◦ C) = 2.003 · 109 N/m2 . Se le variazioni di pressione sono elevate, integrando la relazione (4) si ottiene p − p0 ρ = ρ0 exp . ε Gas e vapori sono invece molto comprimibili; ε dipende quindi dal loro stato e dal tipo di trasformazione che stanno subendo. Se consideriamo una trasformazione politropica, per un gas perfetto, per cui vale la pW n = cost differenziando si ha che W n dp + pnW n−1 dW = 0 e dalla (3) si ricava W dp − pnW dp =0 ε e quindi ε = np. Per gas a pressione atmosferica soggetti a trasformazioni isoterme (n = 1), ε∼ = 105 N/m2 . Viscosità La viscosità è una proprieta dei fluidi che lega gli sforzi tangenziali alle velocità di deformazione. Consideriamo un fluido tra due lastre piane parallele poste a distanza ∆y. La lastra superiore, di area A, viene messa in moto, ad una velocità V , da una forza orizzontale di modulo F . La lastra inferiore invece resta ferma. In condizioni di moto laminare, il profilo di velocità che si sviluppa tra le due lastre è lineare e varia tra zero (in corrispondenza della lastra inferiore) e V (sulla lastra superiore). Per mantenere un gradiente di velocità tra le due lastre, ∆V , costante (in questo caso ∆V = V − 0 = V ), nonostante l’attrito, è necessaria una forza F costante. Tale forza risulta sperimentalmente proporzionale al gradiente di velocità ∆V , alla superficie A ed inversamente proporzionale allo spessore ∆y: F ∝A ∆V . ∆y 17 Superficie in movimento con velocità V F ∆y Superficie ferma Figura 7: Flusso laminare tra due lastre piane parallele. La costante di proporzionalità nella relazione precedente è la viscosità dinamica µ [N s/m2 ], quindi lo sforzo tangenziale risulta τ= F ∆V ∂u =µ =µ A ∆y ∂y dove y è la direzione normale al moto del fluido e u è la componente di ve∂u è detta velocità di deformazione. locità parallela alle lastre. La quantità ∂y Oltre alla viscosità dinamica, si definisce la viscosità cinematica: ν = µ/ρ [m2 /s]. La configurazione di flusso descritta prende il nome di flusso di Couette piano, e, a causa del fatto che le due lastre piane devono essere di lunghezza infinita, non è fisicamente realizzabile. Uno strumento che si può utilizzare per determinare la viscosità (reometro) è costituito da due cilindri coassiali come quelli riportati in Fig. 8 (flusso di Couette rotante). 18 re ri h ω F ωre ωi ri ωi F ω Figura 8: Flusso laminare tra due cilindri coassiali. Il comportamento di µ è differente per gas e liquidi. Per i gas la viscosità aumenta all’aumentare della temperatura, per i liquidi invece, la viscosità diminuisce con la temperatura. In generale, la legge che lega sforzi tangenziali e velocità di deformazione è detta equazione reologica, e si esprime come ∂u τ =f . ∂y Per un fluido Newtoniano, la funzione f è lineare, come già visto, e le caratteristiche reologiche sono indipendenti dal tempo. Esistono altri tipi di fluidi per cui la f ha un diverso comportamento. Esercizio Un olio lubrificante è posto tra due piatti piani paralleli. Un piatto è fisso, l’altro si muove con velocità V = 3 m/s. Data la distanza tra i due piatti h = 2.6 cm, determinare lo sforzo di taglio nel lubrificante, noto che µolio = 0.26 N s/m2 . Soluzione: τ =µ V 3 Ns m 1 du = µ = 0.26 · · · = 30 Pa. dn h 0.026 m2 s m 19 Tensione superficiale La tensione superficiale è una forza per unità di lunghezza, di natura molecolare, che si stabilisce all’interfaccia tra fluido e solido o tra due fluidi non miscibili. In generale, una molecola di fluido subisce le azioni attrattive delle molecole circostanti. Se consideriamo una molecola che si trova all’interfaccia tra due fluidi, per esempio una molecola d’acqua all’interfaccia tra aria e acqua, essa subisce da un lato le azioni attrattive delle molecole d’acqua, e dall’altro quelle delle molecole d’aria. Poichè le forze esercitate dall’aria sono molto inferiori rispetto quelle esercitate dalle molecole d’acqua, le forze di attrazione non sono simmetriche. Questo fa si che la risultante delle forze sulla molecola sia rivolta verso la massa d’acqua e la molecola stessa tenda a ‘sfuggire’ dall’interfaccia. Di conseguenza, la superficie di interfaccia si comporta come una membrana elastica (tende ad assumere l’estensione minima possibile e a rimanere tesa). Esperimento: consideriamo una pellicola di liquido sospesa all’interno di un telaio metallico ad U, con un lato mobile di lunghezza b. La pellicola di liquido tende a tirare il filo mobile verso l’interno per minimizzare l’area della sua superficie. Per mantenere fermo il filo, è necessario applicare una forza F nella direzione opposta. Quindi, la tensione superficiale risulta F 2b (il 2 è dovuto al fatto che ci sono due facce di liquido a contatto con l’aria). S= Si consideri, come interfaccia aria-acqua, una tratto di superficie cilindrica di raggio r e profondità L. Sulla superficie agiscono, perpendicolarmente ad essa, la pressione esterna esercitata dall’aria pe e la pressione interna fatta dall’acqua pi . Si consideri una sezione di circonferenza del cilindro di ampiezza ϕ (Fig. 9); alle estremità agiscono, tangenzialmente alla superficie, le due tensioni superficiali S. Sul sistema agiscono due forze: • la risultante delle spinte elementari dovute alla differenza di pressione ∆p = pi − pe . Questa ha solo componente verticale (per la simmetria del sistema) ed è diretta verso l’alto (essendo la pressione interna pi maggiore di quella esterna). L’area su cui agisce ∆p è laproiezione sul ϕ piano orizzontale della superficie: b · L, dove b = 2r sin , quindi la 2 forza è: ϕ ∆p b L = 2∆p r sin L 2 • la risultante dovuta alle 2 tensioni superficiali. Anch’essa ha solo comϕ ; poichè la tensione superficiale ponente verticale ed è pari a 2S sin 2 20 è una forza per unità di lunghezza che agisce lungo il bordo laterale L, la forza agente è: ϕ 2S sin L 2 ed è diretta verso il basso. b pe L pi S S r ϕ Figura 9: Tensione superficiale. Allora, per l’equilibrio nella direzione verticale si ottiene ∆p = S . r In generale, su una superficie qualunque, vale l’equazione di Laplace: 1 1 + ∆p = S r1 r2 dove r1 e r2 sono i raggi principali di curvatura della superficie. Nota: Se la superficie di interfaccia tra i due fluidi è orizzontale, la tensione superficiale agisce in direzione orizzontale, e non genera differenze di pressione tra interno ed esterno. In generale, se non c’è curvatura, non c’è discontinuità nelle pressioni. Fenomeni di capillarità Con fenomeni di capillarità si intende la risalita o la discesa di un liquido in un tubo di piccolo diametro, ad opera della tensione superficiale. In questo caso, si hanno tre mezzi a contatto: solido, liquido e gas. La tensione superficiale si stabilisce tra i due fluidi e tra solido e fluido. La 21 superficie libera curva, all’interno del tubo, viene detta menisco. La superficie di separazione liquido-gas, quando un liquido viene a contatto con una superficie solida, forma con questa un angolo di contatto β che dipende dalla natura dei tre elementi a contatto. Il fenomeno è dovuto a due tipi di forze di attrazione tra molecole: • forze di coesione, tra molecole uguali; • forze di adesione, tra molecole diverse. Nel caso di acqua all’interno di un tubo di piccolo diametro, sulle molecole d’acqua prevalgono le forze di adesione esercitate dal solido, rispetto a quelle di coesione. L’acqua risale sulle pareti del tubo e quindi l’angolo β risulta minore di 90◦ ; si forma una superficie di curvatura con centro di curvatura esterno, detto menisco concavo. Quando β < 90◦ si dice che il fluido bagna la parete. Se invece di acqua si utilizza del mercurio, prevalgono le forze di coesione, β > 90◦ , il centro di curvatura è interno e si parla di menisco convesso. Ogni volta che β > 90◦ si dice che il fluido non bagna la parete. I due esempi sono illustrati in Fig. 10 β < 90° β > 90° d β β h h d Acqua Mercurio Figura 10: Fenomeni di capillarità. Quantifichiamo quindi la risalita capillare dovuta alla tensione superficiale. Ipotizziamo di avere un tubo immerso all’interno di una bacinella d’acqua. Supponiamo che il fluido bagni la parete e che il menisco che si forma all’interno del tubo sia una calotta sferica di raggio r (Fig. 11). 22 β β 2πrS r h γπr2h Figura 11: Fenomeni di capillarità. Essendo la superficie curva, la tensione superficiale genera una differenza di pressione ∆p all’interfaccia tra interno ed esterno del liquido. La tensione superficiale è tale da far risalire, rispetto al livello esterno, il liquido nel tubo di un’altezza h. Le forze coinvolte sono quindi: il peso della colonna d’acqua che risale nel tubo P , e la tensione superficale S. Per l’equilibrio in direzione verticale: P = S cos βL dove L = 2πr è il perimetro della proiezione della calotta sferica, ove agisce S, mentre P = γπr2 h. Quindi γπr2 h = 2πr S cos β da cui si ricava l’altezza di risalita capillare h= 2S cos β . γr Esercizio Determinare il diametro che deve avere un tubo in vetro per avere una risalita capillare di 1 mm, quando viene immerso in acqua a 20◦ C. γ = 9.789 kN/m3 , β ∼ = 0◦ , S = 0.0728 N/m. Soluzione: γπr2 h = 2πr S cos β =⇒ d = 2r = 2 2S = 2.97 cm. hγ 23
Scaricare