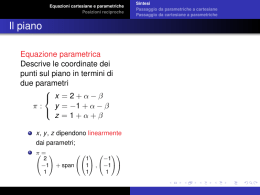
LEZIONE 8 8.1. Equazioni parametriche di rette. In questo paragrafo iniziamo ad applicare quanto spiegato sui vettori geometrici per dare una descrizione delle rette nel piano e nello spazio. Sia r ⊆ S3 una retta. Tale retta è sempre parallela ad un’unica retta passante per l’origine r0 e rimane completamente individuata da essa e daOun punto qualsiasi B R ∈ r. Si noti che dare r0 equivale a dare un qualsiasi vettore ~v 6= ~0 avente r0 come direzione (si veda Figura 8.1.1). y r R r' vr O x Figura 8.1.1 ~ − OR ~ (si veda la lezione Sia P ∈ r. Allora, per definizione, P − R = OP ~ segue che 6 per la definizione di P − R): sommando ad ambo i membri OR ~ = OR ~ + (P − R). Poiché P − R è parallelo al segmento P R, dunque a r, ha OP direzione r0 , quindi è parallelo al vettore ~v 6= ~0 menzionato sopra come mostrato in Figura 8.1.2. Typeset by AMS-TEX 1 2 8.1. EQUAZIONI PARAMETRICHE DI RETTE y Pr R vr P-R r' O x Figura 8.1.2 Segue allora dalla Proposizione 6.3.9, l’esistenza di un numero reale, che chiameremo t tale che P − R = t~v . Mettendo assieme quanto visto segue che P ∈ Sr giace su r se e solo se (8.1.3) ~ = OR ~ + t~v , OP per un qualche t ∈ R. Fissiamo un sistema di riferimento O~ı~~k in S3 . Allora R = (x0 , y0 , z0 ), sicché ~ = x0~ı + y0~ + z0~k , e ~v = l~ı + m~ + n~k : indicando con (x, y, z) le coordinate del OP ~ = x~ı + y~ + z~k , dunque che l’Equazione (8.1.3) punto generico P ∈ S3 si ha OP diviene x~ı + y~ + z~k = x0~ı + y0~ + z0~k + t(l~ı + m~ + n~k ), t∈R o, eguagliando le componenti dei due vettori lungo gli assi coordinati, x = x0 + lt (8.1.4) y = y0 + mt z = z0 + nt. Le Equazioni 8.1.4 vengono spesso chiamate equazioni parametriche della retta r passante per R = (x0 , y0 , z0 ) e parallela al vettore ~v = l~ı + m~ + n~k . Esempio 8.1.5. In S3 sia fissato un sistema di riferimento O~ı~~k . Siano A = (1, 2, 3) ∈ S3 e ~v = 2~ı − 3~k ∈ V3 (O). Allora delle equazioni parametriche della retta r di S3 parallela al vettore ~v e passante per A sono date da x = 1 + 2t (8.1.5.1) y=2 z = 3 − 3t. LEZIONE 8 3 Ci chiediamo quale fra i punti B = (3, 2, 0) e C = (−1, 2, 1) di S3 appartenga alla retta r. Per rispondere a questa domanda bisogna capire se esistono valori di t ∈ R per cui le coordinate di B e C possano essere scritte nella forma data dall’Equazione (8.1.5.1), ovvero se e quale fra i sistemi 3 = 1 + 2t 2=2 0 = 3 − 3t, −1 = 1 + 2t 2=2 1 = 3 − 3t. abbia soluzione. Consideriamo il primo dei due sistemi. Dalla prima equazione si ricava t = 1, valore che sostituito nelle equazioni seguenti le soddisfa identicamente: possiamo quindi affermare che B ∈ R. Consideriamo ora il secondo dei due sistemi. Dalla prima equazione si ricava t = −1, valore che sostituito nella terza equazione dà l’dentità numerica 1 = 6 che, ovviamente, non è verificaa: concludiamo che C 6∈ R. Viceversa supponiamo di avere fissato in S3 un sistema di riferimento O~ı~~k . Dati numeri reali fissati x0 , y0 , z0 , l, m, n, si consideri il luogo r dei punti P = (x, y, z) dello spazio le cui coordinate sono della forma x = x0 + lt y = y0 + mt z = z0 + nt al variare di t ∈ R. Allora, preso t = 0, segue che R = (x0 , y0 , z0 ) ∈ r. Se poi l, m, n non sono tutti nulli esistono in R infiniti altri punti P tali che x~ı + y~ + z~k = x0~ı + y0~ + z0~k + t(l~ı + m~ + n~k ), ~ + t~v ove ~v = l~ı + m~ + n~k . Tali punti descrivono ovvero tali che P − R = OR quindi la retta passante per il punto R sopra definito e parallela al vettore non nullo ~v . Concludiamo che, fissato in S3 un sistema di riferimento O~ı~~k , ogni retta può essere descritta mediante un sistema di equazioni della forma (8.1.4) con l, m, n non simultaneamente nulli e, viceversa, ogni sistema di equazioni della forma (8.1.4) con l, m, n non simultaneamente nulli rappresenta una retta. Si noti che data una retta r rappresentata tramite un sistema di equazioni della forma (8.1.4) si è subito in grado di determinarne un punto (basta scegliere un valore di t ∈ R, per esempio t = 0) e un vettore ad esso parallela (basta considerare il vettore definito dai coefficienti di t nell’equazione, cioè l~ı +m~ +n~k ). In particolare, tramite le loro equazioni parametriche, è facile stabilire se due rette sono parallele oppure no. 4 8.1. EQUAZIONI PARAMETRICHE DI RETTE Esempio 8.1.6. In S3 sia fissato un sistema di riferimento O~ı~~k e si considerino la retta r dell’Esempio 8.1.5 e la retta s di equazioni parametriche x = 2 − 2t y=0 z = 3t. Allora r ed r0 sono parallele: infatti r è parallela al vettore ~v = 2~ı − 3~k ed s a w ~ = −2~ı + 3~k , che sono paralleli fra loro. Si noti che di punti su una retta ne esistono infiniti, cosı̀ come sono infiniti i vettori ad essa paralleli. Questa infinità di possibili scelte ci permette di affermare che una stessa retta può essere rappresentata da sistemi di equazioni parametriche anche molto diversi: per tale motivo non si dovrebbe mai scrivere “le equazioni parametriche di r sono . . . ”, bensı̀ “delle equazioni parametriche di r sono . . . ”. Esempio 8.1.7. In S3 sia fissato un sistema di riferimento O~ı~~k e si consideri la retta s di equazioni parametriche x = 3 − 4t y=2 z = 6t. Tale retta passa per il punto di coordinate B = (3, 2, 0) ed è parallela al vettore w ~ = −4~ı + 6~k . Ricordando l’Esempio 8.1.5 segue che s ha in comune con la retta r di Equazioni (8.1.5.1) il punto B ed è ad essa parallela, perché w ~ = −4~ı + 6~k = −2(2~ı − 3~k ) = −2~v , quindi essendo rette parallele ed incidenti devono coincidere, cioè s = r: questa uguaglianza non è immediatamente deducibile dall’analisi dei sistemi di equazioni parametriche che definiscono r ed s. Più in generale, dal confronto di sistemi di equazioni parametriche di due rette, si può dedurre la loro posizione relativa. Ricordo che due rette r, s ⊆ S3 possono essere coincidenti, incidenti in un unico punto, parallele distinte (in questi tre casi le rette sono contenute in un piano e vengono perciò dette complanari) oppure non essere nè parallele nè incidenti: in quest’ultimo caso si parla di rette sghembe. Osservazione 8.1.8. Le Equazioni (8.1.4) della retta r possono essere pensate come leggi orarie del moto di un punto P lungo la retta r con posizione iniziale R = (x0 , y0 , z0 ) e velocità costante ~v = l~ı + m~ + n~k . Questo punto di vista può essere molto utile nell’affrontare problemi di incidenza fra rette date tramite equazioni parametriche. Per esempio si consideri la retta r dell’Esempio 8.1.5 e la retta s di equazioni parametriche x=t−1 (8.1.8.1) y =2−t z = 6 + t. LEZIONE 8 5 La retta s è parallela al vettore w ~ = ~ı − ~ + ~k : poiché r è parallela a ~v = 2~ı − 3~ , deduciamo che r 6k s. Ci domandiamo se r ed s siano incidenti. Un primo approccio che può venire in mente è il seguente: conosciamo le coordinate del punto generico su r e su s in funzione di un parametro, quindi basta eguagliare tali coordinate e vedere se il sistema cosı̀ ottenuto ha soluzione o no: se sı̀ allora r ∩ s 6= ∅, se no r ∩ s = ∅. Bisogna fare però attenzione a come si traduce praticamente tale approccio. Infatti se semplicemente eguagliamo le Equazioni (8.1.5.1) alle Equazioni (8.1.8.1) otteniamo 1 + 2t = t − 1 2=2−t 3 − 3t = 6 + t. che, come è facile verificare, non ha soluzione, dunque sembrerebbe che r ∩ s = ∅, cioè sembrerebbe di essere di fronte a una coppia di rette sghembe. Invece si noti che (−1, 2, 6) ∈ r ∩ s: infatti si ottiene per t = −1 dalle Equazioni (8.1.5.1) e per t = 0 dalle Equazioni (8.1.8.1). Dove sta l’errore? L’errore sta nel fatto che noi ci siamo domandati non se i punti in moto sulle due rette r ed s potranno mai passare per uno stesso punto, ma se ciò accade esattamente nello stesso istante! Quindi il modo per non sbagliare è quello di misurare i tempi in modo diverso sulle due rette utilizzando, ad esempio, il tempo t su r e t0 su s: in questo modo il problema si traduce nel sistema 0 1 + 2t = t − 1 2 = 2 − t0 3 − 3t = 6 + t0 . Dalla seconda equazione otteniamo t0 = 0: sostituendo nelle rimanenti ottenniamo t = −1. Come visto sopra i valori t0 = 0 su s e t = −1 su r danno lo stesso punto (−1, 2, 6). Se invece consideriamo la retta u di equazioni parametriche x=t y =2−t z =6+t ancora r 6k u e, inoltre, è facile verificare che r ∩ u = ∅, poiché il sistema 0 1 + 2t = t 2 = 2 − t0 3 − 3t = 6 + t0 non è compatibile: concludiamo che r ed u sono sghembe. 6 8.1. EQUAZIONI PARAMETRICHE DI RETTE È noto dalla geometria euclidea che un altro modo per descrivere una retta r è quello di dare due punti distinti A e B che le appartengono. In tal caso ci si può ricondurre al caso precedente. Infatti un punto, per esempio A, l’abbiamo: per costruire un vettore parallelo a r basta considerare B − A (si veda la Figura 8.1.9). y Br A B-A O x Figura 8.1.9 Se fissiamo un sistema di riferimento O~ı~~k in S3 , A = (xA , yA , zA ), B = (xB , yB , zB ) allora B−A = (xB −xA )~ı +(yB −yA )~ +(zB −zA )~k , sicché sostituendo nell’Equazione (8.1.4) otteniamo le equazioni parametriche della retta r passante per A = (xA , yA , zA ) e B = (xB , yB , zB ) x = xA + (xB − xA )t y = yA + (yB − yA )t (8.1.10) z = zA + (zB − zA )t o anche x = (1 − t)xA + txB y = (1 − t)yA + tyB z = (1 − t)zA + tzB (talvolta si scrive sinteticamente P = (1 − t)A + tB). Si noti che P = (x, y, z) ∈ AB se e solo se x = (1 − t)xA + txB y = (1 − t)yA + tyB t ∈ [0, 1], z = (1 − t)zA + tzB , o, equivalentemente, se x = λxA + µxB y = λyA + µyB z = λzA + µzB , λ, µ ≥ 0, λ + µ = 1. LEZIONE 8 7 Per esempio il punto medio M di AB ha coordinate corrispondenti a t = 1/2, cioè xA + xB yA + yB zA + zB M= , , . 2 2 2 Esempio 8.1.11. Fissiamo un sistema di riferimento O~ı~~k in S3 . Siano A = (1, 2, −3), B = (2, 1, 1): chiaramente A 6= B, quindi esiste unica una retta r contenente A e B le cui equazioni parametriche si ottengono utilizzando la Formula (8.1.10) x=1+t y =2−t z = −3 + 4t. 8.2. Equazioni parametriche di piani. In questo paragrafo imiteremo quanto già fatto per descrivere le rette nel piano e nello spazio alla descrizione di piani in S3 . Sia α ⊆ S3 un piano. Tale piano è sempre parallelo ad un’unico piano passante per l’origine α0 e rimane completamente individuata da essa e da un punto qualsiasi A ∈ α. z A v O w α y α' x Figura 8.2.1 Quindi per descrivere α è necessario descrivere α0 . Siano ~v e w ~ due vettori 0 contenuti in α e non paralleli: allora la Proposizione 6.3.10 assicura che P 0 ∈ α0 ~ 0 = t~v + uw. se e solo se esistono t, u ∈ R tali che OP ~ ~ − OA: ~ segue che OP ~ = Sia ora P ∈ α. Allora per definizione P − A = OP ~ + (P − A). Poiché P − A è parallelo al segmento P A, dunque a α, esso è OA contenuto in α0 , quindi esistono, per quanto osservato sopra, s, t ∈ R tali che P − A = t~v + uw. ~ Mettendo assieme quanto visto segue che P ∈ S3 giace su α se e solo se (8.2.2) ~ = OA ~ + t~v + uw, OP ~ 8 8.2. EQUAZIONI PARAMETRICHE DI PIANI per un qualche t, u ∈ R (si veda Figura 8.2.3). z P A v P-A O w α y α' x Figura 8.2.3 Fissiamo un sistema di riferimento O~ı~~k in S3 . Allora A = (xA , yA , zA ), sicché ~ = xA~ı + yA~ + zA~k , ~v = vx~ı + vy~ + vz~k , w OA ~ = wx~ı + wy~ + wz~k : indicando ~ = x~ı + y~ + z~k , con (x, y, z) le coordinate del punto generico P ∈ S3 si ha OP dunque l’Equazione (8.2.2) diviene x~ı +y~ +z~k = xA~ı +yA~ +zA~k +t(vx~ı +vy~ +vz~k )+u(wx~ı +wy~ +wz~k ), t, u ∈ R o, eguagliando le componenti dei due vettori lungo gli assi coordinati, x = xA + vx t + wx u y = yA + vy t + wy u (8.2.4) z = zA + vz t + wz u. Le Equazioni (8.2.4) vengono spesso chiamate equazioni parametriche del piano α passante per A = (xA , yA , zA ) e parallelo ai vettori ~v = vx~ı + vy~ + vz~k , w ~ = wx~ı + wy~ + wz~k . Esempio 8.2.5. In S3 sia fissato un sistema di riferimento O~ı~~k . Siano A = (1, 2, 3) ∈ S3 e ~v = 2~ı − 3~k , w ~ = ~ı + ~ + ~k ∈ V3 (O). I vettori ~v e w ~ non sono paralleli, quindi i dati individuano un piano α le cui equazioni parametriche sono date da x = 1 + 2t + u (8.2.5.1) y =2+u z = 3 − 3t + u. Si noti che la retta r dell’Esempio 8.1.5 di equazioni parametriche x = 1 + 2t y=2 z = 3 − 3t, LEZIONE 8 9 è contenuta in α: infatti i suoi punti si ottengono ponendo u = 0 nelle Equazioni (8.2.5.1) Viceversa supponiamo di avere fissato in S3 un sistema di riferimento O~ı~~k . Dati numeri reali fissati xA , yA , zA , vx , vy , vz , wx , wy , wz , si considerino il luogo α dei punti P = (x, y, z) dello spazio le cui coordinate sono della forma x = xA + vx t + wx u y = yA + vy t + wy u z = zA + vz t + wz u. al variare di t, u ∈ R. Allora, procedendo come nel caso della retta, è facile verificare che tale luogo è il piano α passante per il punto A = (xA , yA , zA ) e parallelo ai vettori ~v = vx~ı + vy~ + vz~k , w ~ = wx~ı + wy~ + wz~k . È noto dalla geometria euclidea che un altro modo per descrivere un piano α è quello di dare tre suoi punti A, B e C non allineati. In tal caso ci si può ricondurre al caso precedente. Infatti un punto, per esempio A, l’abbiamo: per costruire due vettori paralleli a α basta considerare B − A e C − A. Se, rispetto al sistema di riferimento O~ı~~k fissato in S3 , A = (xA , yA , zA ), B = (xB , yB , zB ), C = (xC , yC , zC ) allora B − A = (xB − xA )~ı + (yB − yA )~ + (zB − zA )~k e C − A = (xC − xA )~ı + (yC − yA )~ + (zC − zA )~k sicché sostituendo nell’Equazione (8.2.4) otteniamo le equazioni parametriche del piano α passante per A = (xA , yA , zA ), B = (xB , yB , zB ), C = (xC , yC , zC ) (8.2.6) o anche x = xA + (xB − xA )t + (xC − xA )u y = yA + (yB − yA )t + (yC − yA )u z = zA + (zB − zA )t + (zC − zA )u. x = (1 − t − u)xA + txB + uxC y = (1 − t − u)yA + tyB + uyC z = (1 − t − u)zA + tzB + uzC (talvolta si scrive sinteticamente P = (1 − t)A + tB + uC). Se poi vogliamo descrivere le coordinate dei punti del triangolo ∆ABC è sufficiente che ci limitiamo a considerare i punti le cui coordinate si possono esprimere tramite la Formula (8.2.6) con t, u ∈ [0, 1] e t + u ≤ 1, cioè P = (x, y, z) ∈ ∆ABC se e solo se x = (1 − t − u)xA + txB + uxC y = (1 − t − u)yA + tyB + uyC t, u, t + u ∈ [0, 1], z = (1 − t − u)zA + tzB + uzC 10 8.2. EQUAZIONI PARAMETRICHE DI PIANI o, equivalentemente, se x = λxA + µxB + νxC y = λyA + µyB + νyC z = λzA + µzB + νzC λ, µ, ν ≥ 0, λ + µ + ν = 1. Esempio 8.2.6. Fissiamo un sistema di riferimento O~ı~~k in S3 . Siano A = (1, 2, −3), B = (2, 1, 1), C = (2, 2, 2).: chiaramente A 6= B, quindi esiste unico un piano α contenente A, Be C le cui equazioni parametriche si ottengono utilizzando la Formula 8.2.6 x=1+t+u y =2−t z = −3 + 4t + 5u.
Scaricare