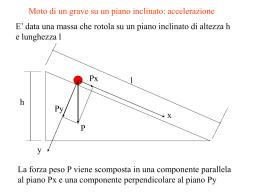
Prof. A. Di Muro Moto circolare uniformemente accelerato Nel M.C.U.A. il vettore velocità non ha più il modulo costante, è presente invece un’accelerazione detta accelerazione tangenziale a T che si mantiene costante. Ripensando alla circonferenza tagliata e disposta su una retta, il moto di P è un moto rettilineo uniformemente accelerato dove l’accelerazione è proprio l’accelerazione tangenziale. L’accelerazione è quindi diretta come la velocità, lungo la tangente ( da qui il nome accelerazione tangenziale ), se è concorde con la velocità il moto è circolare uniformemente accelerato, se è discorde il moto è circolare uniformemente decelerato. Da questo moto discende che anche la velocità angolare non è più costante, ma varia in modo uniforme, esisterà quindi un’accelerazione angolare anch’essa costante. L’accelerazione angolare media è quindi definita come: rad ed ha come unità di misura i 2 . t s L’accelerazione angolare istantanea è invece d . dt d , visto che il vettore può variare solo perpendicolarmente al dt piano della circonferenza, anche sarà disposto nella stessa direzione di . Il vettore accelerazione angolare è Se aumenta, ha lo stesso verso di altrimenti avrà verso opposto. aT O r P fin iniz iniz Determiniamo le accelerazioni del moto: a dv d d dr r r r v dt dt dt dt fin v Prof. A. Di Muro Sappiamo già che il termine v è l’accelerazione centripeta o normale, per cui aN v Il primo termine è un’accelerazione diretta ( utilizzando la regola della mano sinistra ) come il vettore velocità, e quindi proprio l’accelerazione tangenziale: aT r il cui modulo vale aT r . Il vettore accelerazione è quindi espresso dalla relazione: a aT aN O a aN aT P Ripensando alla circonferenza tagliata e disposta su una retta, abbiamo visto che il moto di P è un moto rettilineo uniformemente accelerato e l’accelerazione è a T . proprio l’accelerazione tangenziale. Se indichiamo con s un tratto d’arco allora deve essere: v v 0 aT t P O 1 s s 0 v0 t aT t 2 2 2 aT (s s 0 ) v 2 v02 2r s ricordando dalla geometria che l'arco di circonferenza s è dato dal prodotto del raggio per l’angolo sotteso espresso in radianti s r , sostituendo anche v r e aT r si ricavano le leggi del moto circolare uniformemente accelerato: 0 t x 1 0 0 t t 2 2 2 ( 0 ) 2 02 v a facili da ricordare perché del tutto simili alle leggi del moto rettilineo uniformemente accelerato. Prof. A. Di Muro Esercizio: Un corpo si muove su una circonferenza di raggio 2.00 m con accelerazione angolare costante. Ad un certo istante la sua velocità è di 1.00 m / s, e dopo 3.00 secondi ha percorso 5.00 m. Determinare a) l’accelerazione angolare b) la velocità angolare dopo 5.00 secondi c) l’accelerazione centripeta dopo 2.00 secondi d) l’accelerazione tangenziale dopo 2.00 secondi e) l’accelerazione dopo 2.00 secondi f) il numero di giri fatti dopo 10.0 secondi g) h) i) i vettori accelerazione normale, accelerazione tangenziale ed accelerazione totale dopo 2.00 secondi l’angolo in gradi sessagesimali che il vettore accelerazione totale forma con l’accelerazione tangenziale dopo 2.00 secondi i vettori , r , v, dopo 2.00 secondi e verificare che a r v a) 0 v0 1.00 rad s 5.00 1 ma (3.00) 0.500 2.50 rad quindi (3.00) 0 t t 2 r 2.00 s r 2.00 2 da cui 2 (3.00) 0t 2(2.50 0.500 3.00) rad 0.2222 0.222 2 2 t 9.00 s b) (5.00) 0 t 0.500 0.2222 5.00 1.611 1.61 rad s c) (2.00) 0 t 0.500 0.2222 2.00 0.9444 0.944 aN (2.00) 2 (2.00) r (0.9444)2 2.00 1.784 1.78 d) aT r 0.2222 2.0 0.4444 0.444 rad quindi s m s2 m l’accelerazione tangenziale è costante. s2 e) a(2.00) aT2 aN2 (0.4444)2 (1.784)2 1.839 1.84 m s2 Prof. A. Di Muro 1 1 f) (10.0) 0 t t 2 0.500 10.0 0.2222 10.02 16.11 16.1 rad quindi 2 2 (10) 16.11 2.564 2.56 giri 2 6.283 aT g) dopo due secondi il punto ha descritto un angolo a n giri P aN 1 1 (2.0) 0 t t 2 0.500 2.00 0.2222 4.00 2 2 1.444 1.44 rad O nel 1° quadrante, di conseguenza il vettore a N forma con l’asse x un angolo di ed il vettore a T forma con l’asse x un angolo di . 2 Si ha: aN aN [cos( ) i sen( ) j] aN 1.784(cos 4.5856 i sen 4.5856 j) 0.2256 i 1.770 j = 0.226 i 1.77 j aT aT [cos( ) i sen( ) j ] 2 2 m s2 aT 0.4444(cos3.0148 i sen 3.0148 j) 0.4408 i 0.05620 j = 0.441 i 0.0562 j m s2 a aN aT 0.2256 i 1.770 j 0.4408 i 0.05620 j = 0.6664 i 1.714 j 0.666 i 1.71 j Verifichiamo i moduli delle accelerazioni: aN (2.00) (0.2256)2 (1.770)2 1.784 1.78 m s2 aT (2.00) (0.4408)2 (0.05620)2 0.4444 0.444 a(2.00) (0.6664)2 (1.714)2 1.839 1.84 m s2 m s2 h) ricaviamo l’angolo con il prodotto scalare tra i vettori: cos a aT (0.6664)(0.4408) (1.714)(0.05620) 0.24157 a aT 1.839 0.4444 da cui cos1 (0.24157) 76 1' 15'' m s2 Prof. A. Di Muro i ) dal punto precedente , la rotazione avviene in senso antiorario per cui ha direzione e verso dell’asse z, ( 2.00 ) = 0.9444 k = 0.944 k r (2.00) r (cos i sen j) 2.00(cos1.444 i sen1.444 j) 0.2529 i 1.984 j 0.253 i 1.98 j m la velocità ha direzione e verso dell’accelerazione tangenziale, per cui è sufficiente moltiplicare il versore dell’accelerazione tangenziale per il modulo della velocità: aˆT 0.4408 i 0.05620 j m = 0.9919 i 0.1265 j 2 0.4444 s v(2.00) (2.00) r 0.9444 2.00 1.888 1.89 e m s v (2.00) v aˆT 1.888(0.9919 i 0.1265 j) 1.873 i 0.2388 j 1.87 i 0.239 j m s2 Un altro modo per calcolare la velocità è dato dal prodotto vettoriale v (2.00) r 0.9444 k (0.2529 i 1.984 j) 1.874 i 0.2388 j 1.87 i 0.239 j m s2 L’accelerazione angolare è diretta come la velocità angolare per cui 0.2222 k 0.222 k Infine: a r v 0.2222 k (0.2529 i 1.984 j) 0.9444 k ( 1.874 i 0.2388 j ) 0.05619 j 0.4408 i 1.770 j 0.2255 i 0.6663 i 1.714 j 0.666 i 1.71 j m s2 rad s2
Scarica