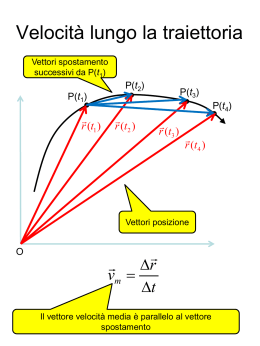
Moto circolare vario y s(t ) R (t ) P(t) • r (t ) s(t) φ(t) O v a x Versore radiale x(t ) cos (t ) r (t ) R Rrˆ(t ) y (t ) sin (t ) Versore tangente x(t ) sin (t ) v (t ) R ( t ) R (t )ˆ(t ) s(t )ˆ(t ) y (t ) cos (t ) x(t ) sin (t ) cos (t ) 2 a (t ) R (t ) (t ) R y ( t ) cos ( t ) sin ( t ) a s (t ) s 2 (t ) s (t )ˆ(t ) rˆ(t ) s 2 (t ) vs 2 (t ) R a 2 (t ) R r R R Il vettore rotante • Il “vettore rotante” è un vettore che ruota mantenendo il suo modulo costante. • Esempio: il vettore r (t ) rx (t ) cos (t ) r (t ) R Rrˆ(t ) r ( t ) sin (t ) y rx (t ) sin (t ) dr (t ) R ( t ) R (t )ˆ(t ) s (t )ˆ(t ) r ( t ) dt cos (t ) y dr (t ) dr (t ) r (t ) 0 r (t ) dt dt 0 (t ) 0 (t ) Formula di Poisson dr (t ) r (t ) dt Moto vario qualunque Versore normale Versore binormale ˆ n̂ P Raggio di curvatura ρ s(t) Ω bˆ ˆ nˆ Versore tangente Cerchio osculatore in P C Centro di curvatura Traiettoria v sˆ a sˆ s2 s vs velocità scalare nˆ s as accelerazione scalare Dinamica • Le idee di Newton I. Newton 1642-1727 – I moti dei corpi non sono indipendenti, ma si influenzano l’un l’altro (interazione tra corpi) – Quando due corpi interagiscono, deve esistere una relazione funzionale tra le grandezze cinematiche dei loro moti – Ma quali grandezze cinematiche? – E quale relazione? L’idea fondamentale di Newton • Quando due corpi interagiscono esiste una relazione lineare e omogenea tra le loro accelerazioni m1a1 m2 a2 0 • m1 è una proprietà del solo corpo 1 detta “massa inerziale” di esso • m2 è una proprietà del solo corpo 2 detta “massa inerziale” di esso • Le masse inerziali m1 e m2 sono quantità positive • Non esistono masse inerziali nulle Il primo principio della dinamica • Cosa succede se un corpo solo è isolato? • Risposta: • La sua accelerazione è nulla a 0 • Il moto è rettilineo e uniforme v costante Principio di inerzia o primo principio della dinamica di Newton Il secondo principio della dinamica • Un singolo corpo isolato ha accelerazione nulla (principio di inerzia) • In presenza di un secondo corpo con cui interagisce esso acquista un’accelerazione data da m1a1 m2 a2 0 • Conclusione: • L’interazione con l’altro corpo provoca un’accelerazione • Questo vale per entrambi i corpi • L’interazione è mutua Forza su 1 generata da 2 La forza Forza su 2 generata da 1 • Introducendo i vettori f12 m1a1 f 21 m2 a2 • la relazione m1a1 m2 a2 0 • diventa • ovvero Forza su 1 generata da 2 f12 f21 0 f12 = f21 Forza su 2 generata da 1 Principio di azione e reazione: la forza che 1 esercita su 2 è opposta a quella che 2 esercita su 1 Definizione operativa di massa inerziale • Si pongono in interazione il corpo di massa inerziale incognita mx e la massa unitaria campione mu. • Si misurano i moduli delle due accelerazioni • Si ottiene la massa incognita dalla relazione mx | au | mu | ax | Definizione operativa di forza • La forza è definita dalla relazione fondamentale f ma • Questa è una definizione operativa e assoluta • Infatti il corpo è un corpo qualsiasi • Ma il prodotto ma e la forza f non sono la stessa cosa. • Il prodotto ma è una proprietà del singolo corpo considerato • La forza f è una proprietà di coppia: sia del corpo considerato che del corpo sorgente della forza Ogni forza ha una sorgente!
Scaricare