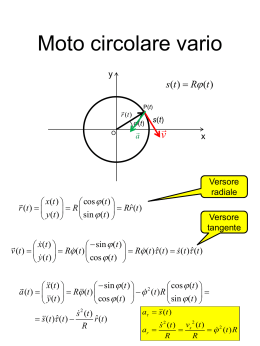
Velocità lungo la traiettoria Vettori spostamento successivi da P(t1) P(t2) P(t1) P(t3) r (t1 ) r (t2 ) r (t3 ) r (t4 ) Vettori posizione O P(t4) r vm t Il vettore velocità media è parallelo al vettore spostamento Velocità lungo la traiettoria Velocità istantanea a t1 La velocità istantanea è tangente alla traiettoria Ascissa curvilinea di P(t1) P(t1) P(t2) s(t1) P(t3) P(t4) r (t1 ) r (t2 ) r (t3 ) rDerivata (t4 ) ascissa curvilinea Ω v vsˆ sˆ Velocità scalare O Versore tangente Modulo della velocità | r | corda | v | lim lim t 0 t t 0 t arco | s | ds lim lim | s | t 0 t t 0 t dt Derivata di un vettore rispetto al tempo Differenza di due vettori Solo in componenti cartesiane ax da a (t t ) a (t ) ay lim dt t 0 t a Vettore Scalare z • La derivata rispetto al tempo di un vettore è un vettore • Nella derivata variano sia il modulo che la direzione del vettore primitivo • Se cambia solo il modulo e non la direzione, si dice che il vettore si allunga (si accorcia) • Se cambia solo la direzione e non il modulo, si dice che il vettore ruota Moto del grave • Il moto del grave è contenuto nel piano verticale che contiene la velocità di esso • Se la velocità è inizialmente lungo la direzione verticale (o è nulla), il moto del grave degenera in un moto rettilineo x(0) vx (0)t 1 2 x(t ) r (t ) r (0) v (0)t gt 1 2 2 z (t ) z (0) vz (0)t gt 2 x(t ) vx (0) v (t ) v (0) gt z ( t ) v (0) gt z x(t ) 0 a (t ) g (cost.) z (t ) g g = 9,8 m/s2 L’asse x è orizzontale e l’asse z è verticale diretto verso l’alto! Il moto del grave è uniformemente accelerato Traiettoria del grave • La traiettoria si ottiene eliminando il tempo dalle equazioni orarie del moto x x(0) vx (0)t 1 2 z z (0) v (0) t gt z 2 Parabola con asse verticale che passa in P0=(x(0), y(0)) x x(0) t v (0) x 2 z z (0) v (0) x x(0) 1 g x x(0) z v (0) 2 v (0) x x z z (0) b( x x(0)) c( x x(0))2 vz (0) b tan v (0) x g c g 2vx 2 (0) 2v0 2 cos 2 Modulo della velocità iniziale b, c costanti vx (0) v0 cos vz (0) v0 sin Inclinazione sul piano orizzontale (angolo di alzo) Moto circolare uniforme • Moto lungo una circonferenza di raggio R • velocità di modulo costante y P(t) r (t ) • cos (t ) rˆ(t ) sin ( t ) φ(t) O x Versore radiale Coordinate polari Coordinate cartesiane r (t ) R cost. cos(t 0 ) x(t ) r (t ) R Rrˆ(t ) y(t ) sin(t 0 ) (t ) t 0 cost. Moto circolare uniforme Accelerazione centripeta s(t ) R (t ) R(0 t ) y v P(t) r (t ) O a • φ(t) s(t) cos(t 0 ) x(t ) r (t ) Rrˆ(t ) R y(t ) sin(t 0 ) x Ascissa curvilinea Versore radiale Versore tangente sin(t 0 ) x(t ) v (t ) R Rˆ(t ) y(t ) cos(t 0 ) cos(t 0 ) x(t ) 2 2 a (t ) Rrˆ(t ) R y(t ) sin(t 0 ) | r (t ) | R; | v (t ) || | R; | a (t ) | 2 R Vettore opposto al versore radiale
Scaricare