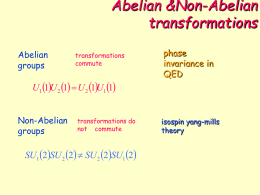
Simmetrie e leggi di conservazione 1. Costituenti della materia 2. Le forze fondamentali 3. Simmetrie e leggi di conservazione 4. Cinematica relativistica 5. Il modello a Quark statico 6. L’interazione Nucleare Debole 7. Introduzione al Modello Standard e massa del Neutrino 8. Violazione di CP nel Modello Standard “Mandala delle Cinque Divinità” Tibet, dipinto nel XVII secolo La parola è utilizzata, anche, per indicare un diagramma circolare costituito, di base, dall'associazione di diverse figure geometriche], le più usate delle quali sono il punto, il triangolo, il cerchio ed il quadrato. Il disegno riveste un significato spirituale e rituale sia nel Buddhismo che nell'Hinduismo. “Mandala” da it.wikipedia.org Simmetrie di un sistema fisico: Sistema classico Formalismo Lagrangiano Formalismo Hamiltoniano Invarianza Equazioni del Moto Sistema quantistico Formalismo Lagrangiano Formalismo Hamiltonianl •Invarianza Eq. Dinamica •Invarianza relazioni di commutazione (Invarianza della probabilità) Il Teorema di E. Noether (teorie di campo lagrangiane, quantistiche e no) stabilisce una relazione tra simmetrie e quantità conservate di un sistema Un esempio “classico”: T 1 2 1 m1r1 m2 r22 2 2 r1 r2 V V (r1 r2 ) m1r1 V (r1 r2 ) r1 m2 r2 V (r1 r2 ) r2 ' Se facciamo una traslazione: ri ri ri a V (r1 r2 ) V (r1 a r2 a) V (r1 r2 ) ' mi ri ' V (r1 r2 ) ri Le equazioni del moto sono invarianti per traslazione Se calcoliamo la forza totale che agisce su 1 e 2: FTOT F1 F2 V (r1 r2 ) V (r1 r2 ) V (r1 r2 ) V (r1 r2 ) 0 r1 r2 r2 r2 dPTOT FTOT 0 dt Nel formalismo lagrangiano classico: L L(qi , qi ) d L L 0 dt qi qi L pi qi Invarianza di L rispetto q dpi L dt q i p conservato Nel formalismo Hamiltoniano qi qi , H p i pi , H d (qi , pi ) , H dt Eventuale conservazione di una quantità dinamica Eventuale simmetria Questo formalismo si trasporta facilmente al caso della Meccanica Quantistica In Meccanica Quantistica si può partire dall’Eq. Di Schroedinger : i s (t ) H S (t ) t s (t ) exp i(t t0 ) H / S (t0 ) T (t , t0 ) Evoluzione temporale (unitaria) Descrizione di Schroedinger e di Heisenberg : Q s (t0 )* Q(t ) S (t0 ) dV S (t )* Q0 S (t ) dV S (t0 )* Q(t ) S (t0 ) S (t )* Q0 S (t ) Heisenberg Schroedinger S (t0 )* Q(t ) S (t0 ) S (t0 )* T 1Q0 T S (t0 ) Q(t ) T 1Q0 T Operatori nella descrizione di Heisenberg Derivando: d dT 1 dT i Q(t ) i Q0 T iT 1Q0 HT 1Q0T T 1Q0TH dt dt dt i d Q(t ) HQ QH Q, H dt d Q i Q(t ) i Q, H dt t Quantità conservate: commutano con H Nel caso in cui vi sia una dipendenza esplicita dal tempo (sistemi non isolati) Invarianza traslazionale: una simmetria continua (r r ) (r ) r 1 r D r r i D (r ) 1 p r L’operatore traslazione è naturalmente associato al momento Traslazione finita n i i D (r ) lim 1 p r exp p r n unitario ( r n r ) Autoaggiunto: è il generatore delle traslazioni spaziali Se H non dipende dalle coordinate D, H 0 p, H 0 Il momento si conserva Invarianza rotazionale: una simmetria continua i 1 J z R () 1 L’operatore rotazione è naturalmente associato al momento angolare J z i x y i x y Operatore momento angolare attorno asse z (angolo phi) Autoaggiunto: è il generatore delle rotazioni Rotazione finita unitario n i i R ( ) lim 1 J z exp J z n n Se H non dipende dall’angolo di rotazione φ attorno all’asse z R, H 0 J z , H 0 Il momento angolare si conserva Invarianza temporale continua Si potrebbe anche procedere come prima costruendo il generatore delle traslazioni temporali (l’energia H), ma basta osservare che i d Q H (t ) i Q, H dt t i d H H (t ) i H , H dt t Se H non dipende da t, l’energia si conserva Simmetrie continue e gruppi: SU(2) Combinazione di due trasformazioni: dipende dalle regole di commutazione dei generatori del gruppo pi , p j 0 Algebra commutativa (Abeliana) delle traslazioni Operatore traslazione lungo asse x: i Dx ( ) exp p x i i i i Di ( ) D j ( ) exp pi exp p j exp p j exp pi D j ( ) Di ( ) (due traslazioni commutano). Inoltre: i i i Dx ( ) Dx ( ) exp p x exp p x exp p j ( ) Dx ( ) e ovviamente i Dx (0) exp p x 0 1 Nel caso delle rotazioni: Regole di commutazione per i generatori: i Rz ( ) exp Lz L , L i j k jkl Ll Algebra non commutativa Rotazioni attorno ad assi diversi in genere non commutano Nel caso di un sistema quantistico a due livelli, le trasformazioni sono descritte dal gruppo SU(2) (due dimensioni) che ha struttura algebrica simile a SO(3) (rotazioni in 3 dimensioni) Simmetria di Isospin Si consideri un sistema quantistico a due stati (originariamente il neutrone e il protone, che per quanto riguarda le forze nucleari potevano essere considerati degeneri). Siccome degeneri, potevano essere ridefiniti arbitrariamente: H p E p p 'p p n H 'p E 'p H n E n n n' p n H n' E n' Degenerazione Ridefinizione Doppia degenerazione simile a ciò che avviene nei sistemi a s=1/2. La degenerazione viene rimossa da un campo magnetico Si può allora introdurre lo spinore a due componenti: (1/ 2 ) p p 1p/ 2 n n1/ 2 n 1/ 2 p 1 0 1/ 2 n 0 1 (1/ 2) (1/ 2) ' U (1/ 2) La ridefinizione precedente diviene: Simmetria proposta per le interazioni forti (rotta dalla parte elettromagnetica) U U 1 det U 1 U 1 i Gruppo di Lie SU(2) Proprietà determinate dalle trasformazioni infinitesime (1 i )(1 i ) 1 Tr 0 det U 1 Può essere scritto nella forma generale: 2 Matrici di Pauli 0 1 1 1 0 0 i 2 i 0 1 0 3 0 1 i j k , i ijk 2 2 2 1 2 (1/ 2 ) 3 (1/ 2 ) p p 4 4 1 2 (1/ 2 ) 3 (1/ 2 ) n n 4 4 1 1 (1/ 2 ) (1 / 2 ) 3 p p 2 2 Isospin 1 1 (1/ 2 ) (1 / 2 ) 3 n n 2 2 'p 1 i p ' 2 n n Una rotazione infinitesima del doppietto p-n: Una rotazione finita in SU(2): U lim 1 i exp i / 2 n n 2 2 (1/ 2 ) ' exp i / 2 (1/ 2) • Generalizzazione di una trasformazione globale di fase • Tre angoli di fase • Operatori non commutanti (Invarianza di fase non abeliana) Il sistema a due nucleoni Prendiamo una di queste trasformazioni: 'p cos 2 ' n sin 2 sin 2 p n cos 2 Uno stato a due nucleoni può essere: 1 pn np 2 1 pn np 2 1 pp 2 3 nn 4 In seguito a questa rotazione: 4' 4 I 1 ( I 3 1,0,1) I 0 ( I 3 0) Singoletto di isospin Gli altri tre stati si traformano l’uno nell’altro in rotazioni di isospin, come farebbe un vettore nello spazio 3-d per rotazioni ordinarie Invarianza per isospin significa che vi sono due ampiezze, I=0 e I=1 E significa che gli stati con I=1 sono tra loro indistinguibili (interazione forte) Simmetrie di gauge (globali e locali) Sono simmetrie continue (gruppo continuo) che possono essere locali o globali. Globali: quantità conservate (carica elettrica) Locali: nuovi campi e loro leggi di trasformazione (teorie di gauge) Consideriamo l’Equazione di Schoedinger 2 2 V (r ) (r ) E (r ) 2m Consideriamo una trasformazione di fase globale: il cambio di fase è lo stesso in tutti i punti i (r ) e (r ) L’equazione di Schroedinger è invariante per tale trasformazione. Tale invarianza è associata (T. di E. Noether) alla conservazione della carica elettrica Ma cosa succede se consideriamo una trasformazione di gauge locale ? k (r ) i (r ) e (r ) i ( r ) (r ) e (r ) Come si fa a garantire l’invarianza di gauge locale? i ( r ) (r ) e (r ) 2 2 i ( r ) i ( r ) V (r ) e (r ) E e (r ) 2m Non invariante! Il problema deriva dal fatto che: i ( r ) i i ( r ) e (r ) e i e ( r ) extra termine ! Per risolvere il problema possiamo introdurre un nuovo campo! E la sua legge di trasformazione! Dal momento che l’Eq. Di Schroedinger libera non è invariante per: 2 i ( x, t ) i ( x, t ) 2m t e ' La modifichiamo introducendo: ' G G G q Campi compensanti Che si trasformano: i q ( x ,t ) 2 i G ( x , t ) i R ( x , t ) 2m t R R ' R iq t In questo modo l’invarianza viene ripristinata Gq A Per dare un significato fisico, scegliamo: R iqV ' i qA 2m ( x, t ) i iqV 2 i qA ( x , t ) i iqV ( x , t ) 2m t ' A A A E si ha l’invarianza: ' eiq V V ' V t 2 ' L’invarianza di gauge locale del campo di Schroedinger • richiede il campo EM • ne stabilisce la legge di trasformazione t ' ' ( x , t ) Vi sono molti altri esempi del principio di gauge In physics, a gauge principle specifies a procedure for obtaining an interaction term from a free Lagrangian which is symmetric with respect to a continuous symmetry -- the results of localizing (or gauging) the global symmetry group must be accompanied by the inclusion of additional fields (such as the electromagnetic field), with appropriate kinetic and interaction terms in the action, in such a way that the extended Lagrangian is covariant with respect to a new extended group of local transformations. LIBERO INTERAGENTE 2 i ( x, t ) i ( x, t ) 2m t 2 i qA ( x , t ) i iqV ( x , t ) 2m t Simmetrie discrete: P,C,T Le simmetrie discrete descrivono cambiamenti non continui di un sistema (non possono essere ottenute integrando trasformazioni infinitesime). Questi cambiamenti sono associati a gruppi di simmetria discreti Parità P x x Inversione di tutte le coordinate spaziali: P: y y z z P (r ) (r ) Il determinante di questa trasformazione è -1. Mentre le rotazioni sono PP (r ) P (r ) (r ) Inoltre è autoaggiunto: PP 1 P dr * (r ) (r ) dr * (r ) (r ) P Operatore unitario. Autovalori: +1, -1 (se stati a parità definita) Autostati: stati a parità definita PP 1 P P H , P 0 La parità è conservata in un sistema se L’esempio del potenziale centrale: PH (r ) H (r ) H (r ) P, H (r ) PH (r ) H (r ) P (r ) H (r ) (r ) H (r ) (r ) 0 Gli stati legati di un sistema a simmetria centrale hanno parità definita. Ad esempio l’atomo di idrogeno Atomo di idrogeno: autofunzioni senza spin : P : P : Yl m ( , ) (1) l Yl m ( , ) Transizioni di Dipolo Elettrico ∆l = ± 1 (r , , ) (r ) Yl m ( , ) Parte radiale Armoniche sferiche P ( ) 1 Considerazioni generali sulla parità Trasformazione discreta: operazione di inversione spaziale delle coordinate: x,y,z -x, -y –z Questa operazione è prodotta dall’operatore parità P P(r) = (-r) Cosa si intende classicamente per la riflessione spaziale ? Nello spazio a 3 dimensioni, la terna -r si può pensare ottenuta della terna +r eseguendo prima una rotazione e poi una riflessione zz Rotazione 180 gradi attorno a z az x x yy z yx -x, y -y, z-z y z -z y Riflessione rispetto al piano xy x x y y Es.: =cosx, P cos(-x)=cos(x) = + positiva (P=+1) =sinx, P sin(-x)=-sin(x) = - negativa (P=-1) Mentre =cosx+sinx, P cosx-sinx ± non ha P definita Scalare: (temperatura o pressione, prodotto scalare fra 2 vettori polari, prodotto scalare fra 2 vettori assiali): è una quantità che non dipende dall’orientazione del sistema di coord. ed è invariante per riflessione Vettori (o vettori polari): r, p… velocità, impulso, campo E Sotto l’operazione P cambiano segno Consideriamo l’operazione P come Riflessione(R)+Rotazione (Ro) z Una rotazione più una riflessione speculare rispetto ad un piano è equivalente ad una inversione dei 3 gli assi. Le equazioni del moto o la Lagrangiana sono invarianti per rotazione, la loro invarianza per la trasformazione r -r equivale all’invarianza per la riflessione speculare, cioè rispetto a un piano R+Ro vv p rp rotazione zione R R+Ro v p rotazione Azione della parità su quantità fisiche notevoli Posizione: P: r r Momento: Momento angolare: P: t t dr dr P: pm p dt dt P : L r p (r ) ( p) L Tempo: Carica: Corrente: P: Campo E: P: E Campo B: P: B k Spin: P: q q J v v J r r kq 3 kq 3 E r r s r ( s ) (r ) I k I B 2 2 r r P: s s Parità di sistemi composti: prodotto delle parità delle parti Parità: spaziale e instrinseca delle particelle: il pione s 0, sd 1 s1 1 / 2, s2 1 / 2 L0 d n n d: parità positiva J L S 1 Conservazione del momento angolare: J=1= L+S (1) LS 1 1 Simmetria globale n+n P ( n, n ) 1 P( ) 1 L 1, S 1 L S pari con J 1 Alcune parità intrinseche non sono osservabili (protone, neutrone) e sono convenzionali (+1 in questo caso). Parità del pione neutro, dalla polarizzazione delle coppie in : 0 , e e e e P( 0 ) 1 J P 0 : pseudoscalari ( ) J P 0 : scalari J 1 : vettori P Diverse proprietà di trasformazione per rotazioni e riflessioni spaziali J P 1 : vettori assiali P(particella) = - P (antiparticella) FERMIONI P(particella) = P (antiparticella) BOSONI Coniugazione di carica C Cambia i segni delle cariche (e dei momenti magnetici) Isospin Simmetrie di Gauge Numeri di particelle: barionico e leptonico
Scaricare