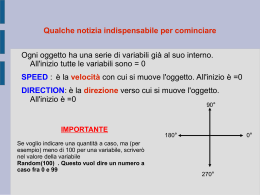
Criteri per la gestione dei dati di tracciamento con sistemi GNSS e Stazioni Totali per l'edilizia residenziale e infrastrutturale Carlo Alberto Birocco Avigliana, 8 Ottobre 2013 – ITG “G. Galilei” Definizione di TRACCIAMENTO TOPOGRAFICO: Fase operativa che comporta la materializzazione del progetto sul terreno, preliminare all'avvio dei lavori di costruzione delle infrastrutture progettate. Tracciare piccole e grandi opere. ● La tipologia, le dimensioni, la complessità e il contesto nel quale si inserisce la nuova opera determinano le fasi operative necessarie e l'approccio metodologico più opportuno Le fasi del tracciamento topografico ● Studio dell'opera da tracciare e del contesto nel quale verrà inserita ● Studio degli esecutivi ● Progettazione e monumentazione della rete di appoggio. Rilevamento, inquadramento, compensazione ● Determinazione dei dati di tracciamento ● Operazioni topografiche di misura e materializzazione dei punti ● Registrazione dei punti materializzati ● Confronto tra punto picchettato e dato del progetto esecutivo Quale strumentazione – Stazione totale: accuratezza elevata, produttività media (migliorabile con sistemi robotici) fortemente legata alle condizioni di intervisibilità tra prisma e strumento. Utilizzabile in ogni condizione. Richiede il setup iniziale ad ogni cambio stazione per determinarne posizione e orientamento. – Ricevitore GNSS: accuratezza centimetrica, spesso sufficiente per moltissime applicazioni. Grande produttività. Utilizzabile solo con condizioni di ricezione idonee. Sistema di riferimento strumentale unico, ma necessità di operare trasformazioni di coordinate nella quasi totalità dei casi. Criteri nella valutazione della stazione totale ● ● ● La precisione angolare e quella lineare devono essere compatibili con le accuratezze di tracciamento attese. La complessità dell'opera, quasi sempre, determina i requisiti minimi della strumentazione da utilizzare. I capitolati per oo.pp. prescrivono solitamente una precisone angolare minima di 2“ (pari a 0.6 mgon). Non deve, tuttavia, considerarsi una regola universale. A' “ sessages. 5 3 2 1 mgon 1,54 0,93 0,61 0,31 mrad 0,0242 0,0146 0,0096 0,0049 -e s +e A A” Per quanto attiene la precisione lineare vi sono poche indicazioni, probabilmente perchè i moderni EDM sono caratterizzati da s dell'ordine di 1 mm + 1 ppm fino a 2 mm + 3ppm. Criteri nella valutazione della stazione totale ● ● ● I sistemi motorizzati e automatici sono caratterizzati da una maggiore produttività rispetto a quelli manuali. Le stazioni totali robotiche offrono la funzionalità „singolo operatore“ consentendo il tracciamento „in continuo“. La grafica on board permette una rapida selezione del punto da tracciare ed il controllo in tempo reale; si può anche utilizzare il disegno vettoriale come „sorgente“ dei dati da picchettare. Criteri nella valutazione del ricevitore GNSS ● ● Il sistema deve operare in modalità RTK o NRTK. Per evitare problemi nelle zone dove la copertura GPRS/EDGE/UMTS è inadeguata, si può impiegare una configurazione base+rover con comunicazione radiomodem UHF (potenza massima consentita 1 W) o Bluetooth long-range (classe I, potenza di circa 20 dBm) oppure con router WiMAX che mette a disposizione le correzioni ricevute da una linea cablata nelle vicinanze del cantiere. I Produttori hw propongono ricevitori con update rate delle coordinate calcolate compreso tra 1Hz e 100 Hz. Tralasciando le applicazioni legate alla gestione in ambito machine control, sono da preferire i ricevitori che operano in RTK ad almeno 5 Hz. La rete di appoggio (inquadramento) ● ● La rete di appoggio (che può essere utilizzata per inquadrare il rilevamento/tracciamento oppure essere, a sua volta, inquadrata in un network geodetico di ordine superiore) costituisce il riferimento planoaltimetrico di base dell'intero processo. Questa premessa esige una realizzazione accurata della rete stessa: progettazione (simulazione osservazioni, previsione sqm, ridondanza ...), materializzazione dei riferimenti permanenti (stabilità, accessibilità, sicurezza), esecuzione delle misure (centramento forzato, strati angolari) e calcolo (compensazione rigorosa, analisi dei risultati) sono step cruciali per il conseguimento del miglior risultato. Per la determinazione topografica dei vertici di rete si impiegano le strumentazioni topografiche anche in modalità mista: GNSS in modalità statica, misurazioni angolari e lineari con stazione totale, misura di dislivelli con livellazioni tecniche/di precisione. La rete di appoggio (inquadramento) ● ● La rete di appoggio (che può essere utilizzata per inquadrare il rilevamento/tracciamento oppure essere, a sua volta, inquadrata in un network geodetico di ordine superiore) costituisce il riferimento planoaltimetrico di base dell'intero processo. Questa premessa esige una realizzazione accurata della rete stessa: progettazione (simulazione osservazioni, previsione sqm, ridondanza ...), materializzazione dei riferimenti permanenti (stabilità, accessibilità, sicurezza), esecuzione delle misure (centramento forzato, strati angolari) e calcolo (compensazione rigorosa, analisi dei risultati) sono step cruciali per il conseguimento del miglior risultato. Per la determinazione topografica dei vertici di rete si impiegano le strumentazioni topografiche anche in modalità mista: GNSS in modalità statica, misurazioni angolari e lineari con stazione totale, misura di dislivelli con livellazioni tecniche/di precisione. La rete di appoggio (inquadramento) ● ● ● Per la realizzazione di infrastrutture di una certa importanza è mandatario l'inquadramento in un frame geodetico che assicura la congruenza geometrica della rete locale che viene impiantata rispetto a punti noti in RDN, e la possibilità di operare direttamente nel sistema di riferimento cartografico qualora il progetto esecutivo sia, a sua volta, „appoggiato“ ad una base cartografica. Qualora l'opera da realizzare non richieda (es. Edilizia residenziale) l'inqudramento geodetico, si determina un sistema locale dove il riferimento planoaltimetrico è arbitrario. I punti della rete di inquadramento devono essere esterni all'area di cantiere e permettere la copertura della stessa attraverso la „maglia“ che si ottiene dalle loro congiungenti. E' opportuno che vengano determinati, contestualmente alla realizzazione della rete, anche alcuni punti di controllo che saranno ubicati all'interno dell'area di cantiere. Punti di controllo ● ● ● I punti di controllo sono necessari a verificare la buona riuscita delle operazioni di orientamento ogni qualvolta sia necessaria la messa in stazione della stazione totale. Infatti, mentre i punti di appoggio costituiscono i riferimenti rispetto ai quali si esegue l'orientamento dell'angolo azimutale oppure il calcolo della c.d. „stazione libera“ per intersezione inversa, i punti di controllo non devono mai essere coinvolti in queste operazioni. Terminata la fase di orientamento della stazione (con controllo diretto, in campagna, dei risultati di orientamento in termini di sqm delle coordinate di stazione e della correzione angolare), si procederà immediatamente alla determinazione delle coordinate di alcuni punti di controllo confrontandole con quelle ottenute in fase di impianto. E' un errore utilizzare, per controllo, le ribattute sui punti utilizzati per l'orientamento della stazione. Orientamento della stazione ● ● ● Nelle fasi iniziali del cantiere è assai raro poter contare sulla materializzazione permanente dei punti di stazione. Fino al termine dei movimenti terra e alla realizzazione dei sottofondi ogni riferimento abituale (picchetto o chiodo) è destinato ad una rapida scomparsa! E, in ogni caso, non si può essere certi della sua posizione nel tempo. Solitamente si procede per stazioni libere, calcolate attraverso intersezione inversa dai punti di appoggio. Gli schemi per poligonale è bene che non vengano utilizzati (salvo rare eccezioni) poichè è complicato procedere al rilievo delle stazioni e all'immediata compensazione delle coordinate in campo per procedere successivamente al tracciamento. Come detto in precedenza, dopo aver orientato una stazione e prima di procedere al tracciamento, verificare sempre il risultato ottenuto attraverso la misura di alcuni punti di controllo. Calcolo della proiezione con GNSS ● ● I sistemi GNSS, come è noto, determinano la posizione del centro di fase dell'antenna rispetto al sistema di riferimento geocentrico associato all'ellissoide WGS84. E' ugualmente noto che queste coordinate non hanno un utilizzo pratico nella topografia (ma nella geodesia sì …) e, quindi, è necessario procedere ad una loro „trasformazione“ per riferirle a sistemi locali oppure cartografici. Nel primo caso, la soluzione più semplice è legata dal calcolo della terna euleriana che avrà, come punto di emanazione, un punto circa baricentrico rispetto all'area rilevata. Questa modalità di calcolo richiede, come minimo, un punto di coordinate note oppure assegnate arbitrariamente; l'orientamento dell'asse Nord (X) seguirà la tangente al meridiano che passa per quel punto. Non si applicano variazioni di scala (è una trasformazione a 4 parametri). Questo tipo di trasformazione non è indicata per rilievi/tracciamenti di estensioni superiori al kilometro. Calcolo della proiezione con GNSS ● ● Per ottenere una trasformazione tra sistemi di riferimento del tipo „a 7 parametri“ e poter contare su una maggiore estensione dell'area di lavoro occorre conoscere almeno 3 punti noti attraverso i quali si determinano con procedimento analitico (es. Bursa-Wolf) i termini incogniti. Attenzione alle funzioni di conversione che alcuni software mettono a disposizione per passare rapidamente dal dato GNSS (WGS84) alle coordinate cartografiche, ad es. ROMA40! I parametri che vengono adottati in queste trasformazioni derivano da considerazioni di natura geometrica assolutamente rigorosa per quanto riguarda le relazioni esistenti tra i diversi datum. Tuttavia detti parametri sono da considerarsi „generici“ perchè non possono tenere conto delle deformazioni locali delle reti (si pensi, ad esempio, alla compensazione delle misure che ne hanno generato le coordinate che vengono poi riportate in monografia). Calcolo della proiezione con GNSS ● ● L'utilizzo della procedura VERTO messa a punto dall'IGMI permette di superare molte difficoltà nella soluzione dei problemi legati alla trasformazione di coordinate. Come è noto, l'Istituto ha messo a disposizione (già da una decina di anni circa) i dati informatizzati (sotto forma di file denominati „grigliati“) che consentono ai software topografici sviluppati in Italia (anche dallo stesso IGMI) di operare la trasformazione di coordinate avendo a disposizione anche solo un punto di coordinate note nel sistema di riferimento nazionale. Quest'ultima condizione è soddisfatta implicitamente in tutti i rilievi NRTK poichè le stazioni CORS appartenenti alle reti GNSS che erogano i servizi di correzione RT sono tutte inquadrate in RDN. Ciò avviene indipendentemente dal tipo di correzione utilizzato (nearest, VRS o MAC). Chi utilizza sistemi base+rover deve includere necessariamente un punto di coordinate note nelle proprie misurazioni qualora la base non sia su un punto noto. Calcolo della proiezione con GNSS ● ● ● ● Quindi, mentre per operazioni topografiche che riguardano modeste estensioni il calcolo della trasformazione di coordinate non pone particolari difficoltà (a condizione di disporre dei dati necessari), occorrono alcuni accorgimenti per quelle applicazioni caratterizzate da importanti sviluppi planimetrici (esempio strade, ferrovie, corsi d'acqua, condotte …). Come si è detto, il motivo è connesso all'estensione del dominio di validità delle trasformazioni, notando poi che per la parte altimetrica esso è notevolmente ridotto rispetto alla componente planimetrica. Lavorando con i grigliati Verto e i sistemi ROMA40 oppure UTM-WGS84, molte di queste limitazioni scompaiono. Diversamente, è da tempo diffusa l'abitudine di suddividere il tracciamento di un'opera a sviluppo longitudinale in blocchi chiamati „cassoni“. Si ricordi che l'accuratezza tipica di un posizionamento RTK o NRTK è centimetrica. Per migliorare il calcolo dei parametri della trasformazione è consigliabile procedere all'acquisizione delle osservazioni sui punti di appoggio in modalità statica piuttosto che RTK. 6 km 2 ● Per ogni cassone (termine assai „discutibile“ ma che ben si attaglia con altre espressioni del mondo cantieristico …) viene calcolata una trasformazione locale (a 4 o 7 parametri) che verrà applicata a tutti i posizionamenti GNSS che ricadono nell'area compresa. Di solito il cassone viene delimitato da 4 punti di appoggio. Sui punti di controllo si verificherà la validità della trasformazione così ottenuta. Cass one ● Cassone 1 Calcolo della proiezione con GNSS Calcolo della proiezione con GNSS ● Il risultato del calcolo di trasformazione (i vari parametri) viene solitamente salvato in un file apposito in modo da poter richiamare rapidamente la trasformazione opportuna in funzione del cassone all'interno del quale si opera. Organizzazione dei dati ● ● Come si è visto nelle slide precedenti, i dati necessari alla corretta esecuzione di un tracciamento topografico sono: – Coordinate dei punti di appoggio (orientamento) – Coordinate dei punti di controllo (per verifica) – Coordinate dei punti da picchettare oppure – File grafico vettoriale con progetto esecutivo È importante mantenere il più possibile distinti i diversi gruppi di punti per evitare possibili involontarie alterazioni delle coordinate durante le operazioni in campagna. Vediamo perchè ... Organizzazione dei dati ● ● ● I software topografici di campagna possono lavorare su punti omonimi con le seguenti modalità: – Media delle coordinate calcolate con ripetizione della misura: in questo caso non è disponibile il valore iniziale delle stesse, ma il risultato della media attualizzato sempre all'ultima misura – Registrazione delle coordinate risultanti da ogni singola lettura; all'interno del libretto si troveranno più righe relative allo stesso punto con coordinate che possono anche differire leggermente. Nel caso di calcolo del valore medio, se il punto battuto è un punto di orientamento che non è separato in un gruppo specifico, l'esecuzione di misure successive sul medesimo porterà ad una modificazione delle coordinate originali (ossia quelle ottenute all'impianto della rete) Di solito i software on board permettono la creazione di gruppi di punti per orientamento, rilievo e tracciamento. Organizzazione dei dati ● È bene sfruttare correttamente la possibilità di gestire queste aree dati: – Punti di orientamento: in questo gruppo (o file „punti fissi“) verranno memorizzate le coordinate die punti di appoggio della rete e anche dei punti di controllo. Queste coordinate non verranno modificate in alcun modo dalle operazioni di orientamento (o del calcolo proiezione) dello strumento – Punti noti: in questo gruppo (o file „coordinate“) si memorizzano le coordinate dei punti oggetto del picchettamento. Queste coordinate non verranno modificate in alcun modo dalle operazioni di tracciamento. Organizzazione dei dati ● È bene sfruttare correttamente la possibilità di gestire queste aree dati: – Libretto celerimetrico e punti GPS (o file „rilievo“): in questa parte del database solitamente vengono registrati i dati dei rilievi di dettaglio. Durante la fase di tracciamento, in questa area vengono memorizzate le misure sul punto da tracciare dopo la sua materializzazione (picchetto, chiodo o altro). Al termine del lavoro in campagna, questo libretto verrà calcolato e le coordinate ottenute saranno confrontate con quanto presente nel progetto esecutivo. Impostazione della stazione totale ● ● ● Punto di stazione: può essere noto oppure incognito. In questo caso occorre procedere con intersezione inversa calcolata osservando almeno tre punti di appoggio. Sono da evitare, possibilmente, operazioni quali apertura a terra o intersezioni su soli due punti. Orientamento: nel caso di stazione su punto noto è bene operare l'orientamento azimutale osservando almeno due punti noti. Se la stazione è stata calcolata per intersezione inversa (v. punto precedente), l'orientamento azimutale risulterà già calcolato. Si ricorda che al termine del picchettamento eseguito da una stazione è bene controllare ancora il centramento della stessa per mezzo del piombo (ottico/laser) e l'orientamento azimutale su almeno un punto di appoggio. Impostazione del ricevitore GNSS NRTK ● ● Se è già stato creato (ad esempio, in fase di rilievo preliminare dello stato di fatto), utilizzare il file contenente i dati della trasformazione (alcuni software la definiscono „calibrazione“). Come già detto, se sono stati definiti più „cassoni“, si caricherà il file (ad esempio C1.CAL) relativo al cassone che contiene i punti che stanno per essere tracciati (ad es. quelli del cassone C1). Il fatto di operare in NRTK, lo ricordiamo, permette di avere la base (virtuale se la modalità è VRS, reale se si opera in MAC) con coordinate corrette (ed inquadrate in ETRF2000:2008). Se le operazioni topografiche si protraggono nel tempo (quindi, probabilmente, con VRS diverse ad ogni sessione), la trasformazione determinata nel primo impianto rimarrà sempre valida. Impostazione del ricevitore GNSS NRTK ● Circa l'estensione dell'area „coperta“ da una determinata trasformazione (concetto richiamato in precedenza), nulla cambia se si utilizza un sistema GNSS VRS rispetto ad un „base+rover“. Impostazione del ricevitore GNSS base+rover ● Il ricevitore che funziona come „base“ può essere posizionato su un punto di coordinate note. Se questo non è disponibile, il ricevitore calcola le coordinate approssimate della propria posizione: si tratta di una soluzione ugualmente valida, a condizione di memorizzare questi valori ottenuti nella prima messa in stazione e utilizzarli nelle sessioni successive, occupando ovviamente sempre lo stesso punto. Impostazione del ricevitore GNSS base+rover ● Il file di calibrazione associato ad un posizionamento con base su punto incognito vale fino a quando non vengono modificate le coordinate della stessa. Quindi, se nel corso di un lavoro si rende necessario spostare la base (es.: rimozione accidentale del picchetto) e le coordinate di quest'ultima si acquisiscono nuovamente in modalità STD, occorre ricalcolare la trasformazione e generare un nuovo file di calibrazione. Eliminare dalla memoria del controller il precedente file CAL per evitare pericolose confusioni! Impostazione del ricevitore GNSS base+rover ● Il file di calibrazione associato ad un posizionamento con base su punto incognito vale fino a quando non vengono modificate le coordinate della stessa. Quindi, se nel corso di un lavoro si rende necessario spostare la base (es.: rimozione accidentale del picchetto) e le coordinate di quest'ultima si acquisiscono nuovamente in modalità STD, occorre ricalcolare la trasformazione e generare un nuovo file di calibrazione. Eliminare dalla memoria del controller il precedente file CAL per evitare pericolose confusioni! Materializzazione punti di tracciamento ● ● ● I punti vengono materializzati in modo opportuno, tenuto conto della loro funzione, di concerto con l'impresa. Picchetti, chiodi, modine, incisioni sul magrone … È bene che il topografo e l'impresa si intendano al meglio circa la definizione die punti da picchettare. Per i fili fissi del c.a., ad es., solitamente il chiodo coincide con lo spigolo del manufatto e, quindi, rimane all'interno del cassero. In alcuni casi, per comodità di posa di determinate pannellature, viene richiesto che il riferimento sia posto all'esterno. Tradizionalmente i punti da picchettare venivano (e vengono ancora) organizzati in liste di coordinate (file ASCII) utilizzando il software topografico in ufficio mantenendo il CAD dell'esecutivo come base. La tendenza attuale è quella di operare direttamente sulla grafica grazie all'integrazione delle interfacce CAD su controller per ricevitori GNSS e stazioni totali. Grazie per l'attenzione! www.sokkia-italia.it [email protected]
Scaricare