LEZIONE 36
36.1. La definizione di superficie.
In questo paragrafo iniziamo a dare alcuni esempi di superfici ed a definire alcuni oggetti
ad esse naturalmente associati.
Come già fatto per le curve, considereremo lo spazio S3 con un fissato sistema di
riferimento O~ı~~k e la sua usuale identificazione con R3 .
Definizione 36.1.1. Sia D ⊆ R2 un aperto. Ogni funzione f : D → R3 viene detta
superficie parametrizzata.
Un insieme di punti S ⊆ R3 si dice superficie se è l’immagine di una superficie parametrizzata (cioè di una funzione) continua f : D → R3 . La funzione f è anche detta
rappresentazione parametrica o parametrizzazione di S.
Si noti che una parametrizzazione di una superficie C può essere visto come un modo
per definire un “sistema di coordinate” sulla superficie. Infatti si considerino per ogni
(u0 , v0 ) ∈ D le porzioni di rette xu0 = { (u0 , y) ∈ D } e yv0 = { (x, v0 ) ∈ D }. Abbiamo
allora due famiglie di curve parametrizzate su S le curve parametrizzate
f|xu0 : xu0 −→ Xu0 ⊆ S ⊆ R3
t −→ f|xu0 (t) = f (u0 , t),
f|yv0 : yv0 −→ Yv0 ⊆ S ⊆ R3
t −→ f|xv0 (t) = f (t, v0 ).
Le curve Xu0 e Yv0 ricoprono completamente la superficie S nel senso che per ogni suo
punto passa una curva di ognuno dei due tipi: chiameremo tali curve curve coordinate.
Si noti, però, che tali curve potrebbero non essere uniche: ciò accade, per esempio, se
la parametrizzazione di S non è iniettiva. Anche per questo (ma non solo) si introduce la
definizione di superficie regolare.
Definizione 36.1.2. Una superficie parametrizzata f : D → R3 si dice regolare se è
iniettiva, f ∈ C 1 (D, R3 ) e se
rk(Jf(u0 ,v0 ) ) = 2
per ogni (u0 , v0 ) ∈ D.
Una superficie S ⊆ R3 is dice regolare se esiste una sua parametrizzazione regolare.
Typeset by AMS-TEX
1
2
36.2. IL PIANO E LA SFERA COME PRIMI ESEMPI DI SUPERFICI(E)
Si ricordi che, indicate con fx , fy , fz le funzioni componenti di f , si ha
∂fx
∂fx
∂u (u0 , v0 )
∂v (u0 , v0 )
∂fy
y
.
Jf(u0 ,v0 ) = ∂f
∂u (u0 , v0 )
∂v (u0 , v0 )
∂fy
∂fy
∂u (u0 , v0 )
∂v (u0 , v0 )
Si noti inoltre che
df|xu0
dt
(v0 ) =
df|yu0
∂f
(u0 , v0 ),
∂v
dt
(u0 ) =
∂f
(u0 , v0 ).
∂u
Sia g = (gu , gv ): I → D ⊆ R2 una curva parametrizzata di classe C 1 tale che g(t0 ) =
(u0 , v0 ). Allora F = f ◦ g: I → C ⊆ R3 è una curva parametrizzata contenuta in S e risulta
dF
∂f
dgu
∂f
dgv
(t0 ) =
(u0 , v0 )
(t0 ) +
(u0 , v0 )
(t0 ).
dt
∂u
dt
∂v
dt
Se sia g che f sono regolari, allora tale risulta F : infatti
linearmente indipendenti, dunque
∂f
∂u (u0 , v0 )
e
∂f
∂v (u0 , v0 )
sono
dF
∂f
dgu
∂f
dgv
(t0 ) =
(u0 , v0 )
(t0 ) +
(u0 , v0 )
(t0 ) 6= 0.
dt
∂u
dt
∂v
dt
Ritorneremo sulla nozione di superficie regolare e, in particolare, sul significato della
condizione sul rango della jacobiana nelle prossime lezioni
36.2. Il piano e la sfera come primi esempi di superfici(e).
I primi esempi di superfici parametrizzate sono il piano e la sfera che descriveremo in
questo paragrafo.
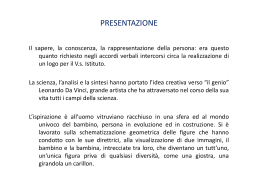
36.2.1. Il piano. Sia α ⊆ R3 un piano. Tale piano è sempre parallelo ad un’unico
piano passante per l’origine α0 e rimane completamente individuata da essa e da un punto
qualsiasi A ∈ α.
z
A
p
O
q
α
α'
x
Figura 36.1
y
LEZIONE 36
3
Quindi per descrivere α è necessario descrivere α0 . Siano p~ e ~q due vettori contenuti in
α0 e non paralleli: allora la Proposizione 6.3.10 assicura che P 0 ∈ α0 se e solo se esistono
~ 0 = u~q + v w.
u, v ∈ R tali che OP
~
~ − OA:
~ segue che OP
~ = OA+(P
~
Sia ora P ∈ α. Allora per definizione P −A = OP
−A).
0
Poiché P − A è parallelo al segmento P A, dunque a α, esso è contenuto in α , quindi
esistono, per quanto osservato sopra, u, v ∈ R tali che P − A = u~
p + v~q. Mettendo assieme
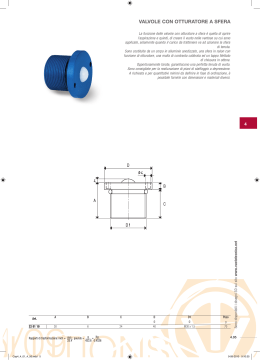
quanto visto segue che P ∈ S3 giace su α se e solo se
~ = OA
~ + u~
OP
p + v~q,
(36.2.1.2)
per un qualche u, v ∈ R (si veda Figura 36.2).
z
P
A
p
O
q
α
P-A
y
α'
x
Figura 36.2
~ =
Fissiamo un sistema di riferimento O~ı~~k in R3 . Allora A = (xA , yA , zA ), sicché OA
xA~ı + yA~ + zA~k , p~ = px~ı + py~ + pz~k , ~q = qx~ı + qy~ + qz~k : indicando con (x, y, z) le
~ = x~ı + y~ + z~k , dunque l’Equazione (8.2.2)
coordinate del punto generico P ∈ R3 si ha OP
diviene
x~ı + y~ + z~k = xA~ı + yA~ + zA~k + u(px~ı + py~ + pz~k ) + v(qx~ı + qy~ + qz~k ),
u, v ∈ R
o, eguagliando le componenti dei due vettori lungo gli assi coordinati,
x = xA + p x u + q x v
(36.2.1.4)
y = yA + py u + qy v
z = zA + pz u + qz v.
Le Equazioni (8.2.4) vengono spesso chiamate equazioni parametriche del piano α passante
per A = (xA , yA , zA ) e parallelo ai vettori p~ = px~ı + py~ + pz~k , ~q = qx~ı + qy~ + qz~k .
In particolare il piano α è immagine della funzione
f : R2 −→ R3
(u, v) −→ (xA + px u + qx v, yA + py u + qy v, zA + pz u + qz v).
4
36.2. IL PIANO E LA SFERA COME PRIMI ESEMPI DI SUPERFICI(E)
Si verifichi, per esercizio, che tale funzione è iniettiva (questo dipende dal fatto che p~ 6 k~q).
Inoltre è evidente che f ∈ C 1 (R2 , R3 ). Infine
Jf(u0 ,v0 )
px
= py
pz
qx
qy
qz
che ha rango 2 (sempre perché p~ 6 k~q). Abbiamo perciò verificato che ogni piano in R3 è
una superficie regolare.
Esempio 36.2.1.5. Siano dati il punto A = (1, 2, 3) ed i vettori p~ = 2~ı −3~k , ~q = ~ı +~ + ~k .
I vettori p~ e ~q non sono paralleli, quindi i dati individuano un piano α le cui equazioni
parametriche sono date da
x = 1 + 2u + v
y =2+v
(36.2.1.5.1)
z = 3 − 3u + v.
Si noti che la retta r di equazioni parametriche
x = 1 + 2t
y=2
z = 3 − 3t,
è contenuta in α: infatti i suoi punti si ottengono ponendo u = t e v = 0 nelle Equazioni
(36.2.1.5.1)
Viceversa dati numeri reali fissati xA , yA , zA , px , py , pz , qx , qy , qz , si considerino il luogo
α dei punti P = (x, y, z) dello spazio le cui coordinate sono della forma
x = xA + px u + qx v
y = yA + py u + qy v
z = zA + pz u + qz v.
al variare di u, v ∈ R. Allora, procedendo come nel caso della retta, è facile verificare
che tale luogo è il piano α passante per il punto A = (xA , yA , zA ) e parallelo ai vettori
p~ = px~ı + py~ + pz~k , ~q = qx~ı + qy~ + qz~k .
È noto dalla geometria euclidea che un altro modo per descrivere un piano α è quello
di dare tre suoi punti A, B e C non allineati. In tal caso ci si può ricondurre al caso
precedente. Infatti un punto, per esempio A, l’abbiamo: per costruire due vettori paralleli
a α basta considerare B − A e C − A. Se, rispetto al sistema di riferimento O~ı~~k fissato
in S3 , A = (xA , yA , zA ), B = (xB , yB , zB ), C = (xC , yC , zC ) allora B − A = (xB −
xA )~ı + (yB − yA )~ + (zB − zA )~k e C − A = (xC − xA )~ı + (yC − yA )~ + (zC − zA )~k
LEZIONE 36
5
sicché sostituendo nell’Equazione (8.2.4) otteniamo le equazioni parametriche del piano α
passante per A = (xA , yA , zA ), B = (xB , yB , zB ), C = (xC , yC , zC )
x = xA + (xB − xA )u + (xC − xA )v
(36.2.1.6)
y = yA + (yB − yA )u + (yC − yA )v
z = zA + (zB − zA )u + (zC − zA )v.
o anche
x = (1 − u − v)xA + uxB + vxC
y = (1 − u − v)yA + uyB + vyC
z = (1 − u − v)zA + uzB + vzC
(talvolta si scrive sinteticamente P = (1 − u − v)A + uB + vC).
Se poi vogliamo descrivere le coordinate dei punti del triangolo ∆ABC è sufficiente che
ci limitiamo a considerare i punti le cui coordinate si possono esprimere tramite la Formula
(8.2.6) con u, v ∈ [0, 1] e u + v ≤ 1, cioè P = (x, y, z) ∈ ∆ABC se e solo se
x = (1 − u − v)xA + uxB + vxC
y = (1 − u − v)yA + uyB + vyC
u, v, u + v ∈ [0, 1],
z = (1 − u − v)zA + uzB + vzC
o, equivalentemente, se
x = λxA + µxB + νxC
y = λyA + µyB + νyC
z = λzA + µzB + νzC
λ, µ, ν ≥ 0, λ + µ + ν = 1.
Esempio 36.2.1.7. Siano dati i puntiA = (1, 2, −3), B = (2, 1, 1), C = (2, 2, 2): chiaramente A 6= B, quindi esiste unico un piano α contenente A, Be C le cui equazioni
parametriche si ottengono utilizzando la Formula 36.2.1.6
x=1+u+v
y =2−u
z = −3 + 4u + 5v.
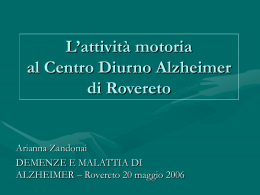
36.2.2. La sfera. Sia S ⊆ R3 la sfera di centro l’origine O = (0, 0, 0) e raggio % >
0. Allora sappiamo che i punti P = (x, y, z) ∈ S sono tutti e soli quelli soddisfacenti
l’equazione
x2 + y 2 + z 2 = %2 .
Sia Pxy la proiezione ortogonale del punto P sul piano xy. Indichiamo con v l’angolo
~ e OP
~ xy (quindi π/2 − v è l’angolo fra OP
~ e ~k ) e con u l’angolo
formato dai vettori OP
~ xy .
formato da ~ı e OP
6
36.2. IL PIANO E LA SFERA COME PRIMI ESEMPI DI SUPERFICI(E)
z
S
P
ρ
O
v
u
y
Pxy
x
Figura 36.3
Chiaramente
P = (% cos u cos v, % sin u cos v, % sin v).
In particolare S è immagine dell’applicazione
f : R2 −→ R3
(u, v) −→ (% cos u cos v, % sin u cos v, % sin v).
Se pensiamo alla sfera come superficie di un pianeta che ruota intorno all’asse z, allora i
parametri u e v rappresentano rispettivamente la longitudine (distanza dal meridiano di
riferimento) e la latitudine (distanza dal piano equatoriale cioè dal piano xy) del punto P .
Tale funzione è C 1 e
− sin u0 cos v0 − cos u0 sin v0
Jf(u0 ,v0 ) = % cos u0 cos v0
− sin u0 sin v0 .
0
cos v0
Chiaramente, se v0 6= π/2 + kπ, k ∈ Z, tale matrice ha rango 2. Se, invece v0 6= π/2 + kπ,
k ∈ Z, risulta rk(Jf(u0 ,v0 ) ) = 1. Ovviamente f non è iniettiva. Siano
D = { (u, v) ∈ R2 | u ∈]0, 2π[, v ∈] − π/2, π/2[ }.
Allora è facile vedere che la restrizione di f a D è iniettiva, ma non suriettiva: infatti i punti
che si possono ottenere in questo modo sono tutti e soli quelli che non giacciono nel piano xz
(cioè quelli del meridiano di riferimento G = { (u, v) ∈ R2 | u = 0, 2π, v ∈] − π/2, π/2 }).
Deduciamo, da quanto visto, che S è una superficie regolare in tutti i punti di S \ { y =
0 }. In realtà, cambiando la parametrizzazione (per esempio considerando u ∈] − π, π[)
è facile vedere che anche i punti di S ∩ { y = 0 } possono essere considerati regolari ad
eccezione di (0, 0, 1) e (0, 0, −1) (cioè dei poli, ovvero dei punti intersezione dell’asse di
rotazione della sfera con la sfera stessa). Per tener conto anche di questi punti bisogna
cambiare ancora parametrizzazione (per esempio scegliendo v ∈]0, π[ o v ∈] − π, 0[).
LEZIONE 36
7
Osservazione 36.2.2.1. Si consideri ora l’ellissoide S di semiassi a, b, c > 0. Tale ellissoide
è il luogo dei punti P = (x, y, z) soddisfacenti l’equazione
y2
z2
x2
+
+
= 1.
a2
b2
c2
Ragionando in maniera analoga a quanto fatto nell’esempio precedente osserviamo che S
è immagine dell’applicazione
f : R2 −→ R3
(u, v) −→ (a cos u cos v, b sin u cos v, c sin v).
Scaricare