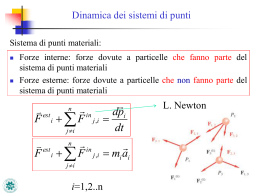
Fisica 2 • • • • • • o o o Argomenti trattati Le variabili angolari. Sistema rigido di punti materiali : energia cinetica rotazionale,momento di inerzia,definizione e collocamento del centro di massa, raggio giratorio,momento meccanico e momento angolare. Equazioni cardinali del moto di un sistema di punti materiali rigido. Rotazione in due dimensioni di un corpo rigido: il centro di massa, rotazione piana, momento angolare, conservazione del momento angolare. Centro di Massa; Momento di Inerzia: proprietà del Centro di Massa, collocazione del Centro di Massa. Calcolo del Momento di Inerzia. Teoremi del Momento di Inerzia. Energia cinetica Rotazionale. Rotazione nello spazio. Il momento meccanico in tre dimensioni,le equazioni della rotazione usando il prodotto vettoriale. Momento angolare di un corpo rigido in tre dimensioni. Lavoro energia e potenza nel moto rotatorio. Moto oscillatorio di un corpo rigido: il pendolo fisico il pendolo composto, il giroscopio. Attrito e rotolamento Equilibrio statico di un corpo rigido. Il diagramma di corpo libero. Vari esempi. Leve e c arrucole. Cenni sui sistemi deformabili Testi e dispense consigliati Serway Principi di Fisica Seconda Edizione I volume editrice EdiSES Halliday Resnick Walker Fondamenti di Fisica Quinta Edizione meccanica,termologia editrice Ambrosiana Il materiale didattico distribuito a lezione e reperibile sul sito web: http://www.fe.infn.it/~ferretti 1 richiami le variabili angolari 2 Posizione angolare:definizione di radiante s r y r s x 2r 360 2rad ; r 0 1rad 57,3 0 polo di rotazione 3 Le variabili angolari (t ) posizione 2 1 t 2 t1 t Velocità media 2 1 t 2 t1 t accelerazione media 2 1spostamento (t ) lim t 0 d t dt Velocità istantanea d t dt (t ) lim t 0 accelerazione istantanea 4 altre variabili 2 La frequenza di rotazione è il numero di giri compiuti nell’unità di tempo frequenza T 1 2 Il periodo del moto è l’intervallo di tempo impiegato per compiere un giro completo periodo evidentemente: 2 2 T 5 equazioni dimensionali [numero puro] s 1 T s s 1 L’Hertz s 2 Hz s 1 6 Gli spostamenti angolari finiti non sono vettori L’ordine delle rotazioni cambia il risultato. Le rotazioni “non commutano” È possibile dimostrare che sono vettori gli spostamenti angolari infinitesimi 7 Le variabili angolari istantanee come vettori come un vettore diretto come l’asse di rotazione. Per convenzione, l’asse di rotazione è orientato con verso positivo verso l’alto La rotazione è in verso orario, è diretta verso il basso, negativa La rotazione in verso antiorario, è diretta verso l’ alto,positiva 8 z Moto circolare r v Relazione vettoriale tra velocità lineare e angolare, e vettore posizione 9 relazioni tra le variabili angolari un caso particolare importante t 0 t dt cos t 0 t t0 t 0 t dt t0 0 posizione angolare 0 velocità angolare 0 accelerazione angolare 1 2 00t t 2 t0 0 all’istante iniziale t0 10 variabili lineari e variabili angolari, accelerazione costante 0 t v v0 at 1 2 x x0 v0t at 2 1 x x0 v0 v t 2 v v 2ax x0 2 2 0 1 2 0 0 t t 2 1 0 0 t 2 0 2 0 2 2 11 Un esercizio 12 Dalle variabili angolari alle variabili lineari importante: gli angoli sono in radianti y y s r ds d r ; r dt dt d d at r r dt r d d at r r dt dt P r at P ar x dt 2 dr ar r 2 dt r Rotazione piana di un punto materiale a distanza r dall’asse , o 13 dal polo di rotazione x richiami:accelerazione e velocità • Per produrre una curva, la forza risultante deve formare un angolo con la velocità. v Ft • Possiamo scomporre la forza • In tal caso, l’accelerazione che è sempre parallela alla forza avrà due componenti: una parallela alla velocità ed una normale alla velocità: una tangenziale ed una normale alla traiettoria. • la accelerazione tangenziale causa il cambimento del modulo della velocità, mentre quella normale ( o radiale) cambia la direzione at F a ar Fr 14 richiami moto di un punto materiale soggetto ad una forza F 15 moto di un punto materiale soggetto alla forza F p mv r F rp quantità di moto, o momento lineare momento meccanico, rispetto ad un polo distante r dal punto momento angolare, rispetto ad un centro di rotazione, o polo, distante r dal punto 1 2 1 1 2 2 2 K mv m r m r energia cinetica rotazionale 2 2 2 2 momento di inerzia, rispetto ad un polo distante r dal punto I mr 1 2 energia cinetica rotazionale, in funzione del momento di K I inerzia 16 2 Energia cinetica rotazionale per una singola particella in moto rotatorio 1 1 2 2 1 2 2 K m mr I 2 2 2 L’energia cinetica di rotazione è uguale al prodotto del momento di inerzia il quadrato della velocità angolare, diviso due 17 richiami il momento meccanico 18 richiami Braccio di leva di F Centro di rotazione O Retta o linea di azione di F r b A B O b F r A B F r F rF sin bF definizione di momento meccanico di un punto materiale A, rispetto ad un polo O 19 r F il momento meccanico è un vettore che risulta da un prodotto vettoriale Una forza F,giacente sul piano xy agisce su una particella posizionata in A. z O y F r A x Braccio di F z z r F F O y O r r A A x x Questa forza esercita sulla particella un momento meccanico =r F rispetto all’origine O r r sin r F y F F Il vettore è diretto come z e la sua intensità è rF=rF Dimensioni m.newton 20 x Il momento meccanico è un vettore libero che si ottiene come momento polare od assiale del vettore forza (F,P) applicata nel punto P 21 determinazione del momento meccanico rispetto ad un punto. i j k metodo vettoriale x yz r F Fx Fy Fz Fz z Fy A r Fx y x metodo scalare bF C A B 22 Momento netto Il momento delle forze è un vettore ed ubbidisce al principio di sovrapposizione Se più momenti agiscono su un corpo, la loro somma prende il nome di momento risultante delle forze, oppure momento netto . net 23 propietà del momento meccanico rispetto ad un punto: il principio dei momenti il momento di una forza rispetto ad un polo è uguale alla somma dei momenti delle sue componenti rispetto a quello stesso polo z net net F2 r y x F3 A net 1 2 3 F1 r F r F1 r F2 r F3 r F1 F2 F3 r Frisul 24 relazione tra il momento meccanico ed il momento di inerzia, nel caso del moto rotatorio di un punto materiale su un piano F ma y Ft F F m r rFt r o r F r ma r Ft Fr r Ft x polo di rotazione Ft mat rmat rmr mr 2 Angoli in radianti I Dimostrazione della II legge di Newton per il moto rotatorio di un punto materiale 25 richiami: momento angolare di un punto materiale z O y p r mA x z rp p O y r A x Un punto materiale di massa m si trova nel punto A e si muove sul piano xy con un momento (o quantità di moto) p. Rispetto all’origine O, esso ha un momento angolare ( o della quantità di moto): rp 26 richiami: momento angolare di un punto materiale r p z O r rp sin kg m p A p x r p rp mr sin 2 r y s 1 J s Dimensioni nel sistema SI 27 il momento angolare di un punto materiale in moto circolare uniforme • Nel caso del moto circolare uniforme la velocità del punto materiale,costante ed r, distanza dal centro di rotazione, sono sempre perpendicolari e giacciono entrambi sul piano dell’orbita circolare del punto • La direzione del momento angolare, rispetto al centro dell’orbita, è perpendicolare al piano dell’orbita. Il verso si calcola come per il prodotto vettoriale. • Nel moto circolare uniforme, il momento angolare è costante se il centro di rotazione è posto nell’origine, ( o polo) ma non se l’origine è posta altrove. mr mr 2 mr • In tal caso il momento angolare si conserva. 28 il momento angolare di un punto materiale in moto circolare uniforme una relazione importante mr I 2 Questa relazione è importante, perchè collega il modulo del momento angolare con la quantità I=mr2, che è il momento di inerzia del punto materiale. Nel caso del punto materiale I non ha un grande interesse. Vedremo che nel caso dei sistemi estesi rigidi, invece, I è la quantità che descrive la distribuzione della massa del sistema in questione, necessaria per determinarne la 29 dinamica Momento angolare e velocità angolare In genere il momento angolare di un punto materiale varia in direzione istante per istante. Nel caso particolare in cui il punto materiale si muove su un piano, che contiene il centro di rotazione O,che considereremo l’origine delle coordinate, allora r e v sono coplanari ed l è sempre perpendicolare al piano. Per il caso di moto circolare se il momento angolare è calcolato rispetto ad al centro del cerchio si ha : mr mr 2 mr il modulo della velocità lineare è r Nel caso del moto circolare possiamo convenzionalmente definire la velocità angolare come un vettore diretto come il momento angolare. 30 OSSERVAZIONE • Nel caso del moto circolare uniforme il momento angolare rispetto al centro della traiettoria è costante: r,m,v sono costanti. • Quando il punto materiale si muove attorno ad un centro di forza, verso cui punta la forza che lo fa girare allora il momento angolare è costante. • Una forza che punta verso un polo si chiama forza centrale • Il momento angolare si conserva se il punto materiale si muove sotto l’azione di una forza centrale 31 relazione tra momento angolare e momento meccanico per un punto materiale in moto rotatorio, attorno ad un centro O 2 mr I d 2 d mr I dt dt d I dt Seconda legge di Newton, in forma angolare le equazioni cardinali del moto di un punto materiale soggetto ad una forza dp ma F dt d I dt 33 Seconda legge di Newton in forma angolare per un punto materiale. dp Fnet dt net d dt La somma vettoriale di tutte le forze che agiscono su una particella è uguale alla derivata rispetto al tempo del momento lineare della particella La somma vettoriale di tutti i momenti delle forze che agiscono su una particella è uguale alla derivata rispetto al tempo del momento angolare della particella 34 Leggi di conservazione dp Fnet dt dp 0 ; p cos t dt d net dt d 0 ; cos t dt se il punto materiale non è soggetto a forze esterne , la sua quantità di moto si conserva se il punto materiale non è soggetto a momenti meccanici esterni , il suo momento angolare si conserva 35
Scaricare