EF
Guida dell'utente
Mentor II
Convertitori in c.c.
Uscita da
25 A a 1850 A
Codice prodotto: 0410-0017-13
Versione numero: 13
www.controltechniques.com
Informazioni sulla sicurezza
Le persone addette alla supervisione e all'installazione o alla manutenzione dell'impianto elettrico di un
convertitore e/o di un'unità opzionale esterna devono possedere una qualifica professionale e una competenza
specifiche. A tal fine, il personale incaricato di tali operazioni deve essere messo nelle condizioni di potere
studiare attentamente questa Guida dell'utente prima di iniziare il ciclo di lavoro e, se necessario, di discuterne
con i propri responsabili.
Le tensioni presenti nell'azionamento e nelle unità opzionali esterne possono provocare gravi scosse elettriche
ed essere mortali. La funzione di Stop dell'azionamento non interrompe le tensioni pericolose dai terminali del
convertitore e dell'unità opzionale esterna. Interrompere l'alimentazione di rete per almeno 2 minuti prima di
procedere a qualsiasi intervento di servizio.
Seguire le istruzioni di installazione. In caso di dubbi o di domande, rivolgersi direttamente al fornitore
dell'apparecchiatura. Al proprietario o all'utilizzatore spetta la responsabilità di assicurare che sia l'installazione
del convertitore e di qualsiasi unità esterna opzionale, sia il modo in cui ne viene gestito il funzionamento e la
manutenzione siano conformi ai requisiti previsti dalla Legge sulle condizioni di sicurezza e di igiene sul lavoro
nel Regno Unito e alla legislazione, regolamenti e codici di comportamento pertinenti in vigore nel Regno Unito
e in altri paesi.
Gli ingressi di Stop e di Avviamento del convertitore non devono essere considerati sufficienti al fine
dell'incolumità del personale. Se un pericolo per la sicurezza è associato a un avvio imprevisto del convertitore,
occorre installare un dispositivo asservito di blocco per evitare che il motore possa essere messo in funzione
involontariamente.
Informazioni generali
Il costruttore declina ogni responsabilità derivante da inadeguata, negligente o non corretta installazione o
regolazione dei parametri opzionali di funzionamento dell'apparecchiatura, nonché da errato adattamento del
convertitore al motore.
Si ritiene che, al momento della stampa, il contenuto della presente Guida dell'utente sia corretto. Fedele alla
politica intrapresa di continuo sviluppo e miglioramento, il costruttore si riserva il diritto di modificare,
senza preavviso, le specifiche o le prestazioni del prodotto, o il contenuto della Guida dell'utente.
Tutti i diritti riservati. Nessuna parte di questa Guida dell'utente può essere riprodotta o trasmessa sotto
nessuna forma né con alcun mezzo elettrico o meccanico, compresi la fotocopia, la registrazione o qualsiasi
sistema di immagazzinamento o recupero delle informazioni, senza autorizzazione scritta dell'editore.
Importante! Versione del software del convertitore
Questo prodotto è fornito della più recente versione di interfaccia utente e di software di controllo macchina.
Qualora tale prodotto debba essere utilizzato con altri convertitori a velocità variabile di Control Techniques in
un sistema esistente, possono presentarsi alcune differenze fra il software di tali apparecchiature e quello del
presente prodotto, dalle quali potrebbe dipendere la mancata corrispondenza delle funzioni. Tale diversità può
inoltre esistere nel caso di convertitori a velocità variabile riconsegnati al cliente da un Service Centre della
Control Techniques.
In caso di dubbi, rivolgersi a un Drive Centre della Control Techniques.
Copyright
© October 2003 Control Techniques Drives Ltd
Versione numero: 13
Indice
Dichiarazione di conformità .................5
8
Serie di parametri ............................... 29
1
Caratteristiche del Mentor II .................6
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
Parametri del Mentor II .........................................6
Sequenza delle fasi di alimentazione ....................6
Uscita ....................................................................6
Retroazione della velocità .....................................6
Riferimento di velocità ...........................................6
Interfaccia per le comunicazioni seriali .................6
Retroazione della corrente ....................................6
Controllo ................................................................6
Risoluzione della velocità ......................................6
8.1
8.2
8.3
8.4
Modifica dei parametri ........................................ 29
Sicurezza ........................................................... 31
Indice dei parametri ........................................... 32
Parametri del Mentor che non possono essere
controllati mediante un ingresso analogico ........ 32
Descrizioni dei parametri ................................... 32
Descrizioni dei parametri avanzati ..................... 46
2
Informazioni sulla sicurezza ................7
2.1
2.2
2.3
2.4
2.5
2.6
2.7
Avvertenza, Attenzione e Nota .............................7
Sicurezza elettrica - avvertenze generali ..............7
Progettazione del sistema e sicurezza del
personale ..............................................................7
Limiti ambientali ....................................................7
Conformità alle normative .....................................7
Motore ...................................................................7
Regolazione dei parametri ....................................7
3
Introduzione ...........................................8
3.1
3.2
3.3
3.4
3.5
3.6
Controllo del motore in c.c. ...................................8
Principi di funzionamento del convertitore a
velocità variabile ...................................................8
Inversione .............................................................8
Controllo ................................................................9
Menu .....................................................................9
Comunicazioni seriali ............................................9
4
Dati .......................................................10
4.1
4.2
Specifiche ...........................................................10
Valori nominali ....................................................10
5
Installazione meccanica .....................13
5.1
5.2
5.3
Dimensioni ..........................................................13
Montaggio ...........................................................13
Raffreddamento e ventilazione ...........................13
6
Collegamenti elettrici ..........................18
6.1
6.2
6.3
6.4
6.5
6.6
Criteri per l'installazione ......................................18
Collegamenti di alimentazione ............................19
Resistori di carico per la retroazione della
corrente ...............................................................21
Collegamenti dei terminali di controllo ................22
Elenco dei terminali .............................................23
Classificazione dei terminali ................................24
7
Procedure operative ...........................25
7.1
7.2
Tastiera e display ................................................25
Approntamento del convertitore per il
funzionamento ....................................................26
Guida introduttiva ................................................26
7.3
Guida Mentor ll dell'utente
Versione numero: 13
8.5
8.6
Menu 1: Riferimento di velocità .............................................. 46
Menu 02: Rampe .................................................................... 48
Menu 03: Selezione della retroazione e anello di velocità ..... 49
Menu 04: Selezione della corrente e limiti .............................. 52
Menu 05: Anello di corrente ................................................... 56
Menu 06: Controllo di campo ................................................. 60
Menu 07: Ingressi e uscite analogici ...................................... 63
Menu 08: Ingressi digitali ....................................................... 66
Menu 09: Uscite di stato ......................................................... 69
Menu 10: Logica di stato e informazioni diagnostiche ............ 71
Menu 11: Varie ....................................................................... 75
Menu 12: Soglie programmabili .............................................. 77
Menu 13: Albero elettrico ....................................................... 78
Menu 14: Impostazione del sistema MD29 ............................ 80
Menu 15 e 16: Menu delle applicazioni .................................. 82
Impostazione dell'MD24-PROFIBUS-DP ............................... 84
Impostazione dell'MD25-DeviceNet ....................................... 85
Impostazione dell'MD-IBS (INTERBUS) ................................. 86
8.7
Diagrammi delle logiche dei menu ..................... 87
9
Procedure diagnostiche ..................... 99
9.1
Codici di allarme ................................................ 99
10
Comunicazioni seriali ...................... 100
10.1
10.2
10.3
10.4
10.5
10.6
10.7
10.8
10.9
10.10
10.11
Collegamento al convertitore ........................... 100
Regolazioni preliminari del convertitore ........... 100
Percorso del cavo delle comunicazioni seriali .. 100
Terminazione ................................................... 100
Componenti dei messaggi ............................... 101
Struttura dei messaggi ..................................... 101
Convertitori multipli .......................................... 101
Numeri interi estesi - modo seriale 4 ................ 101
Invio di dati ....................................................... 102
Lettura dei dati ................................................. 102
Utilizzo del Mentor in una rete con altri
convertitori CT .................................................. 103
10.12 Indirizzamento globale ..................................... 103
11
Opzioni .............................................. 104
11.1
11.2
11.3
11.4
11.5
11.6
11.7
MD29 ............................................................... 104
CTNet (MD29AN) ............................................. 104
Interbus-S (MDIBS) .......................................... 104
Profibus-DP (MD24) ......................................... 104
DeviceNet (MD25) ........................................... 104
Scatola degli I/O ............................................... 104
Unità di controllo del campo FXM5 .................. 104
3
www.controltechniques.com
12
Compatibilità elettromagnetica ....... 106
12.1
12.2
12.3
12.4
12.5
12.6
12.7
Nota generale sui dati EMC ............................. 106
Immunità .......................................................... 106
Emissioni .......................................................... 107
Filtri raccomandati ............................................ 107
Emissioni irradiate ............................................ 108
Costruzione del contenitore ............................. 108
Selezione del cavo del motore ......................... 109
Indice analitico .................................. 112
4
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Dichiarazione di conformità
Control Techniques
The Gro
Newtown
Powys
UK
SY16 3BE
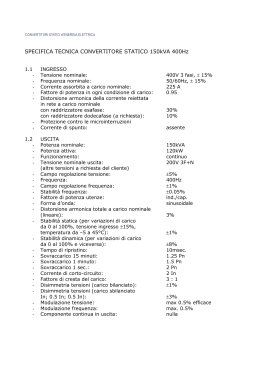
Il convertitore a velocità variabile in c.c. Mentor II, nelle versioni a quadrante singolo o a quattro quadranti con campo di
corrente da 25 A a 1850 A, è stato progettato e prodotto in conformità alle seguenti norme europee normalizzate,
internazionali e nazionali:
EN60249
Materiali base per circuiti stampati
IEC326-1
Schede con circuiti stampati: informazioni generali per il tecnico delle
specifiche
IEC326-5
Schede con circuiti stampati: specifiche per schede con circuiti stampati
su un lato e su entrambi i lati e con fori passanti metallizzati
IEC326-6
Schede con circuiti stampati: specifiche per schede multistrato
IEC664-1
Coordinamento per l'isolamento di apparecchiature comprese in sistemi
a bassa tensione: principi, requisiti e prove
EN60529
Gradi di protezione assicurati dai contenitori (codice IP)
UL94
Grado di infiammabilità delle materie plastiche
*CSA C22.2 0-M1982
Requisiti generali, Codice elettrico canadese, Parte II
*CSA C22.2 0.4-M1982 Collegamento a massa e messa a terra di apparecchiature elettriche
(Messa a massa di protezione)
*CSA C22.2 14-M1987
Apparecchiature di controllo industriali
UL508
Standard per le apparecchiature per la conversione di corrente
* Riguarda unicamente il campo di corrente 900 A - 1850 A del Mentor II
Questi prodotti sono conformi alla Direttiva 73/23/CEE sulla Bassa tensione e alla Direttiva 93/68/CEE sulla
Marcatura CE.
W. Drury
Executive VP Technology
Newtown
Data: 30 aprile 1998.
Questo convertitore elettronico è stato studiato per essere utilizzato insieme a un motore, a un controllore,
a componenti per la protezione elettrica e ad altre apparecchiature di tipo appropriato, formando con essi un
sistema o un prodotto finale completo. L'installazione del convertitore deve essere effettuata esclusivamente
da un montatore specializzato che abbia una conoscenza approfondita dei requisiti riguardanti la sicurezza e la
compatibilità elettromagnetica (EMC). All'assemblatore spetta la responsabilità di garantire che il prodotto o il
sistema finale siano conformi a tutte le normative pertinenti in vigore nel paese di utilizzo del prodotto o del
sistema stesso. Per ulteriori informazioni sulle norme EMC alle quali il presente convertitore è conforme e per
le linee guida all'installazione, consultare il manuale del convertitore o la scheda con i dati EMC.
Guida Mentor ll dell'utente
Versione numero: 13
5
www.controltechniques.com
1
Caratteristiche del Mentor II
1.1
1.8
•
Parametri del Mentor II
Il Mentor II è fornito di una serie di parametri studiati per consentire
all'applicazione di adattarsi con la massima flessibilità ai requisiti
industriali. I parametri sono suddivisi in menu, cioè nel modo più comodo
per renderli facilmente e rapidamente accessibili all'utente.
All'interno di ogni menu, i parametri richiesti unicamente per
personalizzare il convertitore per le applicazioni più complesse sono
stati nascosti, cioè non sono normalmente accessibili, salvo mediante
una sicurezza di alto livello. Se l'accesso è con sicurezza di basso
livello, i parametri nascosti non vengono visualizzati sul display digitale.
Questa disposizione ha l'effetto di ridurre la dimensione percepibile dei
menu, rendendone così più comodo l'utilizzo, e di assicurare la massima
protezione dei parametri appositamente impostati per un'applicazione o
un processo particolare.
•
•
•
•
•
•
•
•
•
Controllo
Tutti gli ingressi analogici e la maggior parte di quelli digitali possono
essere configurati dall'utente per applicazioni specifiche.
Algoritmo dell'anello di velocità PID.
Predisposizione per gli ingressi dell'encoder per il controllo della
posizione.
Predisposizione integrata per la taratura del generatore tachimetrico
(tachimetro).
Controllo programmabile dell'indebolimento di campo.
Sequenza delle fasi e rilevamento della perdita di una fase.
Il software comprende un algoritmo per l'autotaratura dell'anello di
corrente.
Struttura dei parametri gestita mediante menu.
Il convertitore ritorna all'ultimo parametro modificato in ogni menu.
Menu definito dall'utente per un accesso rapido ai parametri utilizzati
più frequentemente.
1.9
1.2
Sequenza delle fasi di alimentazione
La perdita di una o più fasi di ingresso viene rilevata automaticamente.
Il convertitore funzionerà indipendentemente dalla rotazione delle fasi di
ingresso.
1.3
•
•
•
•
•
Volt indotto
0,83 V
0,83 V
Analogico
0,025%
Generatore
tachimetrico
(tachimetro)
0,1%
0,125%
Digitale
0,1%
Generatore
tachimetrico
(tachimetro)
0,1%
0,2%
Analogico
0,025%
Encoder
0,01%
0,035%
Digitale
0,1%
Encoder
0,01%
Retroazione della velocità
Encoder
Encoder
0,11%
Assoluta
Riferimento di velocità
Interfaccia per le comunicazioni seriali
Porta per comunicazioni seriali RS485, optoisolata.
1.7
•
•
•
0,025%
Da -10 V a +10 V
Da 0 a 10 V
Da 4 a 20 mA
Da 20 a 4 mA
Da 0 a 20 mA
Da 20 a 0 mA
Ingresso digitale dell'encoder
Riferimento digitale generato internamente.
1.6
•
Analogico
Risoluzione
combinata
Retroazione
Tensione dell'indotto del motore, o
Generatore tachimetrico (tachimetro), o
Encoder (tachimetro a impulsi).
Algoritmo dell'anello di velocità PID.
1.5
•
•
•
•
•
•
•
•
Riferimento
Uscita
Innesco a 6 impulsi dei tiristori di uscita (SCR). Configurazione
opzionale sul funzionamento a 12 impulsi (in serie o in parallelo).
1.4
Risoluzione della velocità
Retroazione della corrente
Risoluzione 0,1%.
Linearità dell'anello di corrente del 2%, larghezza di banda 80 Hz.
Risposta uniforme a tutti i valori di corrente.
6
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
2
2.1
Informazioni sulla sicurezza
Avvertenza, Attenzione e Nota
Un riquadro contrassegnato dalla parola Avvertenza
contiene informazioni essenziali per evitare pericoli per
l'incolumità delle persone.
AVVERTENZA
Un riquadro contrassegnato dalla parola Precauzione
contiene informazioni necessarie per evitare danni al
prodotto o ad altre apparecchiature.
PRECAUZIONE
2.5
Nella Guida dell'utente sono contenute tutte le istruzioni necessarie per
assicurare la conformità alle norme specifiche EMC.
All'interno dell'Unione Europea, tutti i macchinari in cui viene utilizzato
questo prodotto devono essere conformi alle direttive seguenti:
98/37/CE: Sicurezza dei macchinari.
89/336/CEE: Compatibilità elettromagnetica.
2.6
NOTA
Conformità alle normative
L'installatore è ritenuto responsabile della conformità dell'impianto a
tutte le normative pertinenti, come quelle nazionali sui cablaggi, quelle
antinfortunistiche e quelle sulla compatibilità elettromagnetica (EMC).
Egli deve altresì scegliere con grande attenzione la sezione dei
conduttori, i fusibili o altri dispositivi di protezione e le connessioni di
messa a terra (massa).
Motore
Un riquadro contrassegnato dalla parola Nota contiene le informazioni
necessarie per garantire il corretto funzionamento del prodotto.
Accertarsi che il motore sia installato secondo le raccomandazioni del
costruttore e che l'albero motore non sia scoperto.
2.2
Non superare la velocità massima nominale del motore.
Sicurezza elettrica - avvertenze
generali
Le tensioni utilizzate nell'azionamento possono provocare gravi scosse
elettriche e/o ustioni ed essere anche mortali. Fare molta attenzione
quando si lavora sull'azionamento o in un'area ad esso adiacente.
Le avvertenze specifiche sono riportate nei punti pertinenti della
presente Guida dell'utente.
2.3
Progettazione del sistema e sicurezza
del personale
L'azionamento è stato realizzato come componente a livello
professionale da integrare in un'apparecchiatura o in un sistema
completo. Se installato in modo errato, l'azionamento può comportare
rischi per l'incolumità delle persone.
L'azionamento utilizza tensioni e correnti alte e viene impiegato per
controllare attrezzature che possono causare lesioni.
Le basse velocità di funzionamento possono determinare il
surriscaldamento del motore a causa della minore efficacia della ventola
di raffreddamento. In questo caso, sarà opportuno dotare il motore di un
termistore di protezione. Se necessario, installare un'elettroventola per
la circolazione forzata dell'aria.
I valori del parametri del motore impostati nel convertitore influiscono
sulla protezione del motore. I valori predefiniti del convertitore non
devono essere considerati sufficienti al fine della sicurezza del motore.
2.7
Regolazione dei parametri
Il valore di alcuni parametri incide notevolmente sul funzionamento del
convertitore. Per questa ragione, tali parametri non devono essere
modificati senza averne prima valutato attentamente gli effetti sul sistema
controllato. È inoltre opportuno adottare le misure necessarie al fine di
evitare cambiamenti indesiderati dovuti a errore o a manomissioni.
È necessario prestare la massima attenzione all'impianto elettrico e alle
caratteristiche progettuali del sistema per evitare rischi durante il
funzionamento normale o nel caso di un'anomalia dell'apparecchiatura.
La progettazione, l'installazione, la messa in servizio e la manutenzione
devono essere effettuate da personale con la necessaria formazione
professionale ed esperienza e che abbia letto attentamente queste
informazioni sulla sicurezza e la Guida dell'utente.
Le funzioni di STOP e di ABILITAZIONE dell'azionamento non
interrompono le tensioni pericolose dall'uscita dell'azionamento stesso
né da qualsiasi unità opzionale esterna. Prima di accedere alle
connessioni elettriche, scollegare l'alimentazione mediante un
dispositivo di isolamento elettrico di tipo approvato.
Si raccomanda di tenere nella dovuta considerazione le funzioni
dell'azionamento che potrebbero generare pericoli attraverso la loro
esecuzione prevista o a seguito di un'anomalia di funzionamento. In ogni
applicazione in cui un'anomalia del convertitore o del suo sistema di
comando potrebbe comportare o non impedire il danneggiamento delle
apparecchiature, perdite operative o lesioni personali, è necessario
condurre un'analisi del rischio e, ove opportuno, adottare ulteriori misure
al fine della riduzione di tale rischio (per esempio un dispositivo di
protezione contro le velocità eccessive in caso di guasto del controllo
della velocità, o un freno meccanico esente da guasti per un'eventuale
perdita del freno motore).
2.4
Limiti ambientali
Si raccomanda di seguire le istruzioni contenute nella presente Guida
dell'utente riguardanti il trasporto, il deposito, l'installazione e l'uso del
convertitore, nonché di rispettare i limiti ambientali specificati. Fare in
modo che sugli azionamenti non venga esercitata una forza eccessiva.
Guida Mentor ll dell'utente
Versione numero:
7
www.controltechniques.com
3
Introduzione
Il Mentor II rappresenta l'ultima generazione di convertitori industriali in
c.c. a velocità variabile completamente controllati da microprocessore.
Il campo della corrente di uscita va da 25 a 1850 A. Tutte le taglie di
questo convertitore presentano le stesse caratteristiche di controllo,
monitoraggio, protezione e comunicazioni seriali.
Tutte le unità sono disponibili con configurazione riferita a massa o a
quattro quadranti. I convertitori riferiti a massa presentano solo il
funzionamento in marcia avanti, mentre quelli a quattro quadranti
consentono l'inversione completa della rotazione. Entrambi i tipi di
azionamento offrono il pieno controllo della velocità e/o della coppia del
motore, con le versioni a quattro quadranti che assicurano un controllo
totale in entrambe le direzioni di rotazione.
I parametri di funzionamento vengono selezionati e modificati mediante
il tastierino o il collegamento per le comunicazioni seriali (interfaccia).
L'accesso per la scrittura o la modifica dei valori dei parametri può
essere protetto tramite il sistema del codice di sicurezza a tre livelli.
3.1
Figura 3-1 Comportamento di un raddrizzatore a tiristori (SCR)
monofase completamente controllato che fornisce un
carico altamente induttivo
c.a.
C.C.
1. La tensione d'indotto; la forza controelettromotrice è una
componente della tensione d'indotto. Quindi, supponendo che il
campo sia costante, il controllo della tensione d'indotto assicura il
controllo completo della velocità fino al punto in cui la tensione
raggiunge il valore massimo per il quale l'indotto è stato progettato.
Anche la corrente d'indotto è funzione della tensione d'indotto e
quindi, nel campo di velocità fino alla tensione massima, la coppia
viene anch'essa controllata dalla tensione. Se il campo è
completamente eccitato, la disponibilità della coppia massima viene
normalmente mantenuta dalla velocità zero fino alla tensione
massima d'indotto (velocità base).
2. La tensione di campo; questa determina la corrente di campo e,
di conseguenza, il flusso di campo. Se la tensione di campo può
essere variata indipendentemente dalla tensione d'indotto, la
velocità può essere aumentata alla piena potenza (piena tensione
dell'indotto) oltre il punto in cui la corrente e la tensione applicate
dell'indotto sono al valore massimo. Poiché la coppia è direttamente
proporzionale al flusso di campo, la coppia massima viene ridotta se
si aumenta la velocità indebolendo il campo.
Fondamentalmente, quindi, un convertitore in c.c. a velocità variabile
costituisce uno strumento per controllare la tensione applicata all'indotto
del motore e quindi la corrente fornita al motore. Il convertitore può
essere dotato di mezzi per il controllo del campo nel caso in cui siano
richieste velocità superiori a quella base. Si può inoltre utilizzare il
controllo separato del campo all'interno del campo di funzionamento fino
alla velocità base, al fine di ottenere un controllo esteso della velocità e
della coppia per applicazioni del motore più complesse. Se è disponibile
una retroazione idonea, si può ottenere il controllo della posizione.
Principi di funzionamento del
convertitore a velocità variabile
Una tensione monofase applicata a un ponte a tiristori (SCR)
completamente controllato e a un carico resistivo produce un flusso
intermittente di corrente, determinato dall'innesco del tiristore (SCR) e
interrotto a seguito del passaggio della tensione di alimentazione sullo
zero al termine di ogni semiciclo.
La tensione massima viene fornita quando l'angolo d'innesco è
completamente anticipato, cioè quando f nella Figura 3-1 diventa zero.
Il ritardo dell'angolo d'innesco riduce l'uscita di corrente. Quando il
Carico
induttivo
Fondamentale di corrente
C.C.
Controllo del motore in c.c.
Le funzioni di un motore in c.c. che devono potere essere controllate per
assicurare un utilizzo pratico sono la velocità, la coppia erogata e la
direzione di rotazione. La velocità è proporzionale alla forza
controelettromotrice dell'indotto e inversamente proporzionale al flusso
di campo. La coppia è proporzionale alla corrente dell'indotto e al flusso
di campo. La direzione della rotazione dipende semplicemente dalle
polarità relative delle tensioni dell'indotto e del campo. Occorre pertanto
controllare quanto segue:
3.2
carico è induttivo, come un motore, oppure l'angolo d'innesco è
sufficientemente anticipato, la corrente diventa costante.
La fondamentale della corrente è generalmente in ritardo rispetto alla
tensione, a causa in parte della natura induttiva del carico e in parte del
ritardo dell'angolo d'innesco.
f
f = Angolo di
innesco
Figura 3-2 Configurazione tipica per l'inversione di un convertitore
in c.c. “riferito a massa” utilizzando un paio di contattori
interbloccati nel circuito dell'indotto
Alim. campo
in c.a.
M
c.a.
3.3
Inversione
L'inversione della rotazione viene effettuata in due modi, secondo il tipo di
configurazione dei ponti del convertitore. La configurazione pienamente
controllabile più semplice di ponte a tiristori (SCR) per il funzionamento
con un'alimentazione trifase in c.a. è un ponte a onda intera, che non è
però in grado di invertire la polarità dell'uscita. Questo tipo, chiamato a
quadrante singolo o riferito a massa, necessita di uno strumento per
commutare esternamente i terminali del motore, come mostrato nella
Figura 3-2, qualora sia richiesta l'inversione. Per alcune applicazioni,
questo sistema semplice costituisce una soluzione pratica adeguata.
Se, tuttavia, l'applicazione del motore richiede il suo controllo completo
in entrambe le direzioni, con la capacità di invertire rapidamente e
frequentemente la coppia del motore, occorre utilizzare due ponti antiparalleli, Figura 3-3. Questa configurazione assicura il controllo
completo della marcia avanti e inversa e della frenatura avanti e inversa
senza necessitare di contattori di inversione ed è chiamata a quattro
quadranti, Figura 3-4.
8
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Qualora sia richiesta la frenatura in un convertitore riferito a massa,
occorre fornire un circuito esterno, Figura 3-5 (frenatura dinamica).
In tale caso, la decelerazione non è né controllata né lineare.
Figura 3-3 Configurazione a doppio ponte o con coppia in parallelo
di tiristori trifase (SCR) per un convertitore con motore
in c.c. a 4 quadranti
M
c.a.
Figura 3-4 I quattro quadranti del diagramma coppia-velocità del
motore in c.c.
+M, +I
1
FRENATURA
INVERSA
=
=
=
=
ROTAZIONE
AVANTI
+n, +V
ROTAZIONE
INVERSA
FRENATURA
AVANTI
3
4
Corrente
Coppia
Tensione
Velocità
Il sistema logico richiede una serie di istruzioni affinché possa avviare il
processo di interrogazione, di elaborazione e di generazione del segnale
per il controllo dell'innesco del tiristore (SCR). Le istruzioni sono date
sotto forma di dati suddivisi in singoli valori o parametri che l'utente può
fornire per le operazioni particolari richieste dall'applicazione del motore.
Il comportamento del convertitore in termini di qualsiasi data
applicazione industriale è funzione delle informazioni ricevute per
l'elaborazione da valori di parametri scritti dall'utente e monitorati
internamente.
Per questo motivo, il convertitore Mentor II è dotato di un
microprocessore dedicato e di un software configurato dai parametri
scritti dall'utente. I parametri coprono ogni aspetto significativo correlato
alle prestazioni del motore, in modo che l'utente possa impostare il
convertitore fino a soddisfare esattamente i requisiti dell'applicazione.
Per le comunicazioni, la sicurezza e altre funzioni operative, sono forniti
ulteriori parametri.
3.5
-n, -V
I
M
V
n
Controllo
Indipendentemente dal fatto che un convertitore sia a uno o a quattro
quadranti, la risposta del motore è fondamentalmente funzione
dell'uscita di tensione, che è funzione dell'angolo d'innesco del ponte a
tiristori (SCR), e può essere controllata con precisione.
La qualità della risposta ottenuta dal motore dipende pertanto dalla
capacità della logica del convertitore di ricevere, interpretare ed
elaborare una serie completa di dati riguardanti lo stato del motore e lo
stato desiderato. Alcuni di questi dati possono provenire da fonti
esterne, come il riferimento di velocità (richiesta), il riferimento di coppia,
la retroazione della velocità del motore e così via; alcuni sono derivati
internamente dalla logica stessa del convertitore, come per esempio la
corrente e la tensione di uscita e la condizione di richiesta del sistema
logico nelle varie fasi.
Alim. campo
in c.a.
2
3.4
3.6
-M, -I
Figura 3-5 Configurazione tipica di una frenatura dinamica
(resistiva) di un convertitore in c.c. “riferito a massa”
Menu
I parametri sono numerosi, ma la loro comprensione e accesso sono
stati resi notevolmente più semplici grazie alla loro suddivisione in menu,
ciascuno dei quali copre una particolare area funzionale o logica.
Una panoramica del sistema logico di controllo e una rappresentazione
grafica di ogni singolo menu sono riportate nella serie di diagrammi
logici al termine del Capitolo 8 Serie di parametri .
Comunicazioni seriali
Il collegamento (interfaccia) per le comunicazioni seriali, di cui il
convertitore Mentor II è provvisto, rappresenta una caratteristica
importante per quanto riguarda il funzionamento in un'applicazione di
processo industriale. Per esempio, si possono impostare controller logici
programmabili di processo (PLC) esterni con accesso all'intera logica
del convertitore o a parte di essa, consentendo così la modifica
dell'impostazione di parametri, virtualmente in modo istantaneo, in modo
che si adatti alle diverse fasi di un ciclo di funzionamento o a differenti
condizioni di funzionamento nel processo.
La funzione delle comunicazioni seriali consente inoltre di monitorare
continuamente il funzionamento del convertitore per motivi analitici o di
controllo.
Alim. campo
in c.a.
Resistore
di
frenatura
c.a.
Guida Mentor ll dell'utente
Versione numero:
M
9
www.controltechniques.com
4
Dati
4.1
Specifiche
4.1.1
Tensione massima di ingresso nel
convertitore
(L1, L2 e L3, cioè alimentazione principale al
ponte a tiristori)
480 V +10%
525 V +10%
660 V +10%
4.1.2
standard
opzionale
ordine speciale
Tensione massima raccomandata del motore
Varm = 1,15 x Valimentazione
4.1.3
Anche nelle versioni con tensione superiore (525 V, 660 V), la tensione
massima di alimentazione è di 480 V +10%.
L'ingresso ai circuiti di controllo (elettronici) è:
Standard - 2 conduttori, da 220 V - 10% a 480 V +10%
Con il ponte di campo nord americano - 3 conduttori, da 220 V - 10%
a 480 V +10%
N
E1 ed E3 devono essere collegati alle stesse fasi di L1 e L3
4.1.4
Valori nominali
4.2.1
Corrente, ingresso e uscita
PRECAUZIONE
Le caratteristiche del Mentor lo rendono adatto per un
circuito in grado di fornire una corrente efficace non
superiore a 10000 ampere simmetrici per M25-M210 e
M25R-M210R e a 18000 ampere simmetrici per M350M825 e M350R-M825R di corrente di corto circuito e un
massimo di 480 V +10%.
Tipo e modello
convertitore
Quadrante Quattro
unico
quadranti
Tensione di alimentazione in ingresso
(E1, E2 ed E3, cioè alimentazione ausiliaria)
Trifase bilanciata a 3 conduttori, da 45 a 62 Hz, massimo 480 V
+10%.
NOTA
4.2
Riferimenti e alimentazioni di uscita
(a prova di cortocircuito)
Riferimento 10 V ±5%
Alimentazione encoder
Alimentazione +24 V
Capacità del convertitore di 10 mA.
Capacità del convertitore di 300 mA a 5
V, 12 V o 15 V selezionabili.
Capacità del convertitore di 200 mA per
i relè.
Valori nominali tipici*
a 400 V
(indotto)
a 500 V
(indotto)
kW
kW
HP
HP
Corrente nomin.
max in serv.
continuo
ingresso
uscita
Ac.a.
Ac.c.
M25
M25R
7,5
10
9
12
21
25
M45
M45R
15
20
19
25
38
45
M75
M75R
30
40
38
50
60
75
M105
M105R
37,5
50
47
63
88
105
M155
M155R
56
75
70
94
130
155
M210
M210R
75
100
94
126
175
210
M350
M350R
125
168
156
209
292
350
M420
M420R
150
201
188
252
350
420
M550
M550R
200
268
250
335
460
550
M700
M700R
250
335
313
420
585
700
M825
M825R
300
402
375
503
690
825
M900
M900R
340
456
425
570
750
900
M1200
M1200R
450
603
563
755
1000
1200
M1850
M1850R
750 1005 938 1258
1540
1850
Le uscite sono tutte a prove di guasti ai conduttori, ovvero non risentono
di cortocircuiti accidentali.
* I valori nominali del motore possono essere aumentati a tensioni
d'indotto superiori
4.1.5
Vedere Tensione massima raccomandata del motore nella sezione
4.1 Specifiche .
Temperatura ambiente e umidità
Temperatura ambiente nominale 40°C (104°F)
Altitudine nominale massima
1000 m (3200 piedi).
Campo temperatura di deposito da -40°C a +55°C (da -40°F a 131°F)
Requisito per l'umidità
senza condensa.
4.1.6
Riduzione delle prestazioni
I valori nominali sono influenzati da:
1. Altitudine dell'installazione.
Quando il sito si trova oltre i 1000 m (3200 piedi), ridurre la corrente
normale a pieno carico dell'1,0% per ogni 100 m (320 piedi) di
maggiore altitudine, fino a un massimo di 4000 m.
2. Temperatura ambiente.
Quando la temperatura ambiente locale è oltre i 40°C (104°F),
ridurre le prestazioni dell'1,5% per °C fino a 55°C (0,75% per °F fino
a 131°F).
4.1.7
Protezione delle aperture del contenitore
I convertitori Mentor II sono costruiti in conformità alle specifiche
europee IP00. Questi convertitori sono idonei per il montaggio all'interno
di armadi con protezione delle aperture NEMA.
Il convertitore deve essere protetto contro l'umidità e la contaminazione
conduttrice ed è stato studiato per l'uso in ambienti con grado di
inquinamento 2.
10
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
4.2.2
Valori l2t dei tiristori del Mentor per i fusibili
Fusibili e cablaggio
AVVERTENZA
L'alimentazione in c.a. al convertitore deve essere
adeguatamente protetta contro le correnti di sovraccarico e i
cortocircuiti. Nella tabella di seguito sono mostrati i valori
raccomandati di taratura dei fusibili. La mancata osservanza
di tali raccomandazioni causerà un rischio di incendio.
Tipo e modello
convertitore
Quadrante Quattro
unico
quadranti
M25
M25R
M45
Valori raccomandati Diametro tipico
taratura fusibili
dei cavi
Normali
c.c.
nomin.
uscita
660 V
l2 t
Cod. prodotto
(kA s)
M25/M25R
2435-2716-01
1,15
M45/M45R
2435-4216-01
3,6
M75/M75R
2435-9216-01
15
2435-3132
80
2436-0341
135
2436-5216
320
2
l2 t
Cod.
prodotto
(kA2s)
2436-7262
135
M105/M105R
M155/M155R
M210/M210R
Semiconduttore(1)
c.a.
c.a.
nomin. nomin.
ingresso ingresso
480 V / 525V
Modello
convertitore
Ingresso c.a. e
uscita c.c.
M350/M350R
M420/M420R
M550
M550R
mm2(2) AWG(3)
2438-3040
320
2438-3057
320
A
A
A
32
35
NR
4
10
32
35
40(4)
4
10
M825
2438-4040
320
2438-3040
320
50
60
NR
6
6
M825R
2438-4057
320
2438-3057
320
M700
2438-4040
320
2438-3040
320
M700R
2438.4057
320
2438-3057
320
50
60
70(4)
6
6
M900
2438-8064
3250
2438-3240
3250
100
100
NR
25
2
M900R
2438-3239
3250
2438-3241
3250
M75R
100
100
125(4)
25
2
100
125
NR
35
1/0
M105R
100
125
175(4)
35
1/0
160
175
NR
50
3/0
M155R
160
175
250(4)
50
3/0
200
250
NR
95
300MCM
M210R
200
250
300(4)
95
300MCM
355
400
NR
150
(5)
355
400
550(4)
150
(5)
450
500
NR
185
(5)
M45R
M75
M105
M155
M210
M350
M350R
M420
M420R
M550
M550R
M700
M700R
M825
450
500
700(4)
185
(5)
560
700
NR
300
(5)
560
700
900(4)
300
(5)
630
900
NR
2 x 185
(5)
630
900
1000(4)
2 x 185
(5)
800
1000
NR
2 x 240
(5)
4.2.3
M1200
2438-8064
3250
2438-3240
3250
M1200R
2438-3239
3250
2438-3241
3250
M1850
2438-8064
3250
2438-3240
3250
M1850R
2438-3239
3250
2438-3241
3250
Ventilazione e peso
Tipo e modello convertitore
Quadrante
unico
1000
1200(4)
2 x 240
(5)
M155, M210
1200
NR
2 x 240
(5)
M350
M900R
1000
1200
2 x 700(4) 2 x 240
(5)
1250
2 x 700
2 x 400
(5)
M1200R
1250
2 x 700 2 x 900(4) 2 x 400
(5)
2000
2 x 1200
3 x 400
(5)
M1850R
2000
2 x 1200 2 x 1000(4) 3 x 400
(5)
M1200
M1850
NR
NR
1. I fusibili in c.c. devono del tipo a semiconduttore ad azione rapida.
Tensione nominale per alimentazione di 380 V - 500 V c.c.
per alimentazione di 480 V - 700 V c.c.
per alimentazione di 525 V - 700 V c.c.
per alimentazione di 660 V - 1000 V c.c.
2. I diametri si riferiscono a cavi armati a 3 e 4 fili (con tubo protettivo)
rivestiti con isolamento di pvc, dotati di conduttori di rame e posati in
conformità alle condizioni definite.
3. Diametri tipici dei fili basati su una temperatura ambiente di 30oC
(86oF) , 1,25 x corrente nominale, filo di rame per 75oC (167oF)
con un massimo di 3 conduttori in un tubo protettivo o canalina.
La protezione del circuito di derivazione deve essere fornita dall'utente.
Tutti i cablaggi devono essere conformi all'Art. 310 NEC e ai codici
sull'elettricità applicabili.
4. Nelle applicazioni con bassa inerzia del carico e rigenerazione non
frequente, i fusibili in c.c. possono non essere necessari.
ft3
min-1
kg
lb
1
-
-
10
22
M25R, M45R,
M75R
1
-
-
11
24
1
-
-
14
31
M105R
1
-
-
15
33
M155R, M210R
2
2
70
21
46
3
7,6
270
22
48
M350R
3
7,6
270
23
51
3
17
600
22
48
M420R, M550R
3
17
600
23
51
3
17
600
27
59
M700R, M825R
3
17
600
30
66
4
20
700
70
154
4
20
700
120
264
M420, M550
M700, M825
M900, M1200,
M1850
M900R,
M1200R,
M1850R
NOTA
Tipo
Peso
appross.
min-1
M105
800
Flusso
m3
M25, M45, M75
1000
M825R
M900
Quattro
quadranti
Ventilazione
N
Le tensioni di alimentazione per le ventole di ventilazione sono le
seguenti:
Tipo di ventilazione
1 Convezione spontanea
2 Ventilazione forzata
M155 - M210
24 V alimentati internamente
3 Ventilazione forzata
M350 - M825
Potenza nominale doppia
110 V / 220 V monofase
4 Ventilazione forzata
M900 - M1850 415 V c.a. trifase
5. Per i diametri dei fili, vedere la tabella 310-16 NEC.
NR Non richiesto
Guida Mentor ll dell'utente
Versione numero:
11
www.controltechniques.com
4.2.4
4.2.6
Perdite
Le perdite sono pari allo 0,5% dell'uscita nominale del convertitore nel
campo valori. Nella tabella seguente sono indicate le perdite in kW e in
HP per tutti i modelli, alla tensione d'indotto di 400 V.
Tipo e modello
convertitore
Quadrante Quattro
unico
quadranti
Valori nominali
tipici motore
Perdite
kW
HP
kW
HP
Corrente di campo nominale
Tipo e modello
convertitore
Valore nominale
corrente di
campo (A)
M25, M25R
8 regolati
M45, M45R
8 regolati
M75, M75R
8 regolati
M25
M25R
7,5
10
0,038
0,05
M105, M105R
8 regolati
M45
M45R
15
20
0,075
0,1
M155, M155R
8 regolati
M75
M75R
30
40
0,15
0,2
M105
M105R
37,5
50
0,19
0,25
M210, M210R
8 regolati
M155
M155R
56
75
0,28
0,37
M350, M350R
10
M210
M210R
75
100
0,38
0,5
M420, M420R
10
M350
M350R
125
168
0,63
0,83
M420
M420R
150
201
0,75
1
M550, M550R
10
M550
M550R
200
268
1,0
1,3
M700, M700R
10
M700
M700R
250
335
1,3
1,7
M825, M825R
10
M825
M825R
300
402
1,5
2
M900
M900R
340
456
1,7
2,3
M900, M900R
20
M1200
M1200R
450
603
2,3
3
M1200, M1200R
20
M1850
M1850R
750
1005
3,8
5
M1850, M1850R
20
Fusibile
FS1, FS2, FS3
Codice prodotto
CT
3535-0010
Codice prodotto
CT
3535-0020
Il raddrizzatore di campo è protetto dai fusibili FS1, FS2, FS3 sulle
schede di potenza.
Prima di procedere alla sostituzione dei fusibili FS1, FS2 e
FS3, occorre scollegare le tensioni di alimentazione dal
convertitore per almeno 2 minuti.
AVVERTENZA
4.2.5
Reattori di linea raccomandati
PRECAUZIONE
Al fine di evitare interferenza elettrica e sollecitazioni dI/dt,
evitare il funzionamento senza l'uso di reattori di linea.
Nella tabella di seguito sono indicati i valori tipici per
raggiungere una profondità d'intaglio del 50%. Nei casi in
cui sia richiesta una profondità d'intaglio specifica, occorre
calcolare i valori. Per i dettagli sul calcolo della profondità
d'intaglio, vedere la norma IEC 61800-3.
Tipo e modello convertitore
Reattori di linea La, Lb, Lc (µH)
M25, M25R
200
M45, M45R
200
M75, M75R
100
M105, M105R
100
M155, M155R
75
M210, M210R
75
M350, M350R
35
M420, M420R
27
M550, M550R
25
M700, M700R
23
M825, M825R
19
M900, M900R
17
M1200, M1200R
13
M1850, M1850R
8,6
12
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
5
Installazione meccanica
5.1
Dimensioni
* I dissipatori di calore isolati devono essere messi a terra (massa) per
motivi di sicurezza. A tal fine, viene fornito un terminale.
Le dimensioni principali sono mostrate nella Figura 5-3, Figura 5-4 e
Figura 5-5. Le dimensioni dei punti da ritagliare e da forare per il
montaggio di un convertitore provvisto di un dissipatore di calore
sporgente da un pannello nell'area retrostante sono mostrate nella
Figura 5-3 e Figura 5-4.
1. Il montaggio in superficie richiede la tubazione opzionale provvista di
ventole, flange di montaggio e la vite prigioniera di messa a terra
(massa).
2. Deve essere fornita una ventilazione forzata adeguata.
3. Come elemento opzionale supplementare, può essere installata una
ventola idonea.
4. Rinchiuso.
5.2
5.3
Raffreddamento e ventilazione
5.3.1
Dimensioni minime del contenitore
Montaggio
Il contenitore del convertitore è conforme alle specifiche internazionali
IP100 sui contenitori ed è idoneo per il montaggio in armadi con
certificazione NEMA.
5.2.1
Ubicazione
Il convertitore deve essere installato in un luogo privo di polvere, di
vapori corrosivi, di gas e di qualsiasi liquido. Occorre inoltre prestare
attenzione affinché sia evitata la condensazione di liquidi vaporizzati,
compresa l'umidità atmosferica.
5.2.2
Il contenitore in cui viene installato il convertitore deve essere di
dimensioni adeguate per la dissipazione del calore generato dal
convertitore stesso. È essenziale che attorno al convertitore sia
rispettata la distanza minima di 100 mm (4 pollici), Figura 5-1. Per il
calcolo della temperatura interna al contenitore, si deve tenere conto di
tutte le apparecchiature in esso presenti.
Figura 5-1
Ventilazione
Se il convertitore deve essere posizionato in un luogo in cui è probabile
che si formi condensa quando non viene utilizzato, occorre installare un
riscaldatore anticondensa adeguato. Il riscaldatore deve essere spento
quando il convertitore viene collegato all'alimentazione. Si raccomanda
l'impiego di una configurazione di commutazione automatica.
I convertitori Mentor II non devono essere collocati in aree classificate
come pericolose, salvo il caso in cui siano montati correttamente in un
contenitore approvato e certificati. (Vedere anche la sezione 6.1.4 Aree
pericolose a pagina 18.)
5.2.3
INSTRUCTIONS
8.8.8.8.
88.88
PARAMETER DATA
Per consentire la libera
circolazione dell'aria di
raffreddamento, occorre una
distanza minima di 100 mm
da contattori, relè e altre
apparecchiature adiacenti.
PARAMETER INDEX
MODE
Drive Ready
Alarm
Zero Speed
Run Forward
Run Reverse
Bridge 1
Bridge 2
Current Limit
RESET
Raffreddamento
Per le configurazioni di montaggio e di raffreddamento, i vari modelli
della gamma Mentor II presentano alcune differenze. Per la maggior
parte dei modelli, si può scegliere il montaggio in superficie o a pannello
passante. I convertitori con valori nominali elevati richiedono l'impiego
della ventilazione forzata e possono essere forniti con ventole di
raffreddamento intubate opzionali.
In alternativa, l'installatore può predisporre l'utilizzo di aria di raffreddamento
fornita separatamente da una conduttura. I requisiti per il flusso d'aria sono
indicati nella tabella riportata nella sezione 4.2.3 Ventilazione e peso a
pagina 11. Le varianti sono riepilogate nella tabella seguente.
Modello
convertitore
Montaggio
Pannello Ventilazione
Superficie
passante
Dissipatore
da M25 a M75
Sì
Sì
Naturale
Isolato*
da M25R a M75R
Sì
Sì
Naturale
Isolato*
M105 e M105R
Sì
Sì
Naturale
Isolato*
Sì
Forzata
(ventola
integrata)
Isolato*
Sì
Sì
Forzata
(ventola
integrata)
Isolato*
Sì (1)
Sì (2)
Forzata
SOTTO
TENSIONE
M155 e M155R
M210 e M210R
da M350 a M550
Sì
da M350R a
M550R
Sì (1)
Sì (2)
Forzata
SOTTO
TENSIONE
M700 e M825
Sì (1)
Sì (2)
Forzata
SOTTO
TENSIONE
M700R e M825R
Sì (1)
Sì (2)
Forzata
SOTTO
TENSIONE
da M900 a
M1850
Solo
Forzata (3)
SOTTO
TENSIONE (4)
da M900R a
M1850R
Solo
Forzata (3)
SOTTO
TENSIONE (4)
Guida Mentor ll dell'utente
Versione numero:
5.3.2
Superficie per un'efficace conduzione del
calore
La superficie richiesta Ae per un contenitore in cui sono rinchiuse
apparecchiature che generano calore viene calcolata con l'equazione
seguente:
P
A e = --------------------------------k ( T i – T amb )
dove
Ae
area per un'efficace conduzione del calore, in m2, pari alla
somma delle aree delle superfici non a contatto con una
qualsiasi altra superficie.
P
Perdita di potenza in Watt di tutte le apparecchiature che
producono calore.
Ti
Temperatura massima di funzionamento consentita del
convertitore in oC.
Tamb
Temperatura ambiente esterna massima in oC.
k
Coefficiente di trasmissione del calore del materiale con cui
è realizzato il contenitore in W/m2/ oC.
Esempio:
Calcolo delle dimensioni di un contenitore IP54 (NEMA 12) per un
convertitore di taglia M210
Il caso peggiore viene preso come base dell'esempio, per il quale si
suppongono le condizioni seguenti:
•
L'installazione deve essere conforme alle specifiche IP54 (NEMA
12), cioè il convertitore e il suo dissipatore di calore devono essere
montati completamente all'interno del contenitore e quest'ultimo
deve essere virtualmente sigillato e privo di circolazione d'aria al suo
interno. Il calore può essere dissipato unicamente per conduzione
attraverso i pannelli del contenitore, raffreddati per conduzione,
convezione e radiazione verso l'aria esterna.
13
www.controltechniques.com
•
Il contenitore deve poggiare sul pavimento e contro una parete, in
modo che le sue superfici posteriore e della base non svolgano
alcun ruolo nel processo di raffreddamento. La superficie per
un'efficace conduzione del calore Ae viene fornita esclusivamente
dai pannelli superiore, anteriore e dai due laterali, Figura 5-2.
•
Il contenitore deve essere realizzato con una lamiera verniciata di
acciaio dello spessore di 2 mm (0,1 pollici).
•
La temperatura ambiente massima è di 25 oC.
Dove:
A è l'altezza del contenitore
B è la profondità, dalla parte anteriore a quella posteriore
C è la larghezza.
Si supponga che l'altezza del contenitore A sia 2,2 m (7 piedi 3 pollici)
e che la profondità B sia 0,6 m (2 piedi), dopo una prima valutazione.
Le cifre effettive scelte saranno in pratica dettate dallo spazio
disponibile, forse, o dalle dimensioni standard dei contenitori.
Poiché i valori di Ae, A e B sono noti, la dimensione da calcolare è C.
Occorre quindi permutare i termini dell'equazione per potere trovare C:
Figura 5-2
Ae - 2AB = C (A + B)
A e – 2AB
oppure, C = -------------------------A+B
4,85 – ( 2 × 2,2 × 0,6 )
C = ------------------------------------------------------- = 0,8 m (2 piedi 7 poll.) ca.
2,2 + 0,6
A
B
Contenitore tipico C
con quattro superfici in grado
di disperdere calore.
Se ci si trova a scegliere un contenitore da un catalogo, la superficie
corrispondente non deve essere inferiore al valore calcolato sopra per Ae.
Come trovare l'area che consente un'efficace conduzione del
calore
I valori delle variabili appropriati alle specifiche riportate sopra sono:
Pl
Si deve controllare la distanza libera su entrambi i lati del convertitore.
La larghezza del convertitore è di 250 mm (10 pollici). La distanza libera di
100 mm (4 pollici) è richiesta su entrambi i lati. La larghezza interna minima
del contenitore deve pertanto essere di 450 mm, ovvero di 0,45 m
(18 pollici). Questo valore rientra nella larghezza calcolata ed è quindi
accettabile. Tuttavia, questa dimensione consente uno spazio limitato per
qualsiasi apparecchiatura sui lati del convertitore e questo può avere un
peso nella decisione di quali siano le proporzioni adeguate del contenitore.
Se questa considerazione ha una certa importanza, modificare il valore
calcolato di C per consentire l'installazione di altre apparecchiature e
ricalcolare le altre due dimensioni con lo stesso metodo.
400 W (perdite)
Come regola generale, è preferibile ubicare le apparecchiature che
producono calore nella parte bassa di un contenitore in modo da favorire
la convezione interna e la distribuzione del calore. Nel caso in cui risulti
inevitabile posizionare tali apparecchiature in prossimità della parte
superiore, occorre considerare di aumentare le dimensioni di detta parte
a discapito dell'altezza, oppure di installare ventole interne per la
circolazione dell'aria nei convertitori sprovvisti di una ventola integrata.
Ti
40 oC (per tutti i convertitori Mentor II)
Ventilazione del contenitore
Nel caso in cui un elevato grado di protezione delle aperture non sia un
fattore critico, il contenitore può essere di dimensioni minori se si utilizza
una ventola per favorire lo scambio d'aria fra l'interno e l'esterno del
contenitore.
Tamb
25 oC
Per calcolare il volume dell'aria di ventilazione, V, si utilizza l'equazione
seguente:
k
5,5 (valore tipico per lamiera di acciaio verniciata di 2 mm
(0,1 pollici))
NOTA
N
È fondamentale includere qualsiasi altra apparecchiatura che produce
calore nel valore di PI.
3.1P 1
V = ------------------------T i – T amb
Dove:
400
2
2
A e = --------------------------------- = 4,85 m ( 52 piedi )
5,5 ( 40 – 25 )
V è il flusso d'aria richiesto in m3 h-1.
Come trovare le dimensioni del contenitore
Qualora occorra costruire un contenitore adatto all'installazione, la scelta
può spaziare su varie dimensioni. In alternativa, si può decidere di
scegliere un contenitore fra quelli di una gamma di prodotti standard.
Quale che sia la soluzione prescelta, è importante tenere in
considerazione le dimensioni del convertitore e la distanza minima di
100 mm (4 pollici) attorno allo stesso (Figura 5-1).
La procedura consiste nel valutare due delle dimensioni (l'altezza e la
profondità, per esempio) e poi nel calcolare la terza, controllando infine
che assicuri una distanza libera interna sufficiente.
La superficie che garantisce un'efficace conduzione del calore, come
mostrato nella Figura 5-2, in un contenitore situato sul pavimento e
contro una parete è data da:
Come determinare la ventilazione richiesta per un convertitore
M210
Pl
400 W
Ti
40oC (per i convertitori Mentor II)
Tamb
25oC (per esempio)
Quindi:
3.1 × 400
3 –1
3 –1
V = ------------------------ = 83m h ( 2930ft h )
40 – 25
Ae = 2AB + AC + BC
14
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Figura 5-3 Dimensioni dei convertitori da M25(R) a M210(R)
NOTA:
Il diagramma mostra i terminali A1 e A2 per i soli convertitori a QUATTRO QUADRANTI.
Per i convertitori a un UNICO QUADRANTE, le ubicazioni di A1 e di A2 sono INVERTITIE.
FLUSSO ARIA
b
a
d
c
L1
Dimensioni
unità
mm poll.
A 250 9,84
B 370 14,57
*
**
C
D 112 4,41
E 197 7,76
40 1,58
F
1,18
G 30
b
L2
L3
A1
A1
e
A2
f
da M105
M105R
a
M210
M210R
B
A2
* Per modelli da M25 a M75R
C = 150 mm (5,91 poll.)
** Per modelli da M105 a M210R
C = 195 mm (7,68 poll.)
Ventole
P
Q
Terminale di terra
(massa)
G
E
XA
UNITÀ
TERMINALI
A1, A2
M25
M25R
M45
M45R
M75
M75R
M105
M105R
M155
M155R
M210
M210R
Q
Q
Q
Q
Q
Q
Q
P
Q
P
Q
P
Dimensioni
terminali
a
b
c
d
e
f
g
Non in scala
Dimensioni metriche esatte
Dimensioni in pollici calcolate
Le unità da M25 e M25R a M210 e
M210R (compresa) sono idonee
per il montaggio sia in superficie,
sia a pannello passante
XB
XC
Dimensioni per montaggio
a pannello passante
mm poll.
30 1,18
60 2,36
110 4,33
100 3,94
115 4,53
140 5,51
54 2,13
TERMINALI L1, L2, L3
- Prigionero M8
TERMINALI A1, A2
e Terra (massa)
- Forati per vite M8
(0,32 poll.)
Guida Mentor ll dell'utente
Versione numero:
SCHEMA PER RITAGLIARE
E FORARE IL PANNELLO PER
MONTAGGIO A PANNELLO PASSANTE
XA
XB
XC
XD
XE
mm
poll.
220
8,66
200
7,87
42,5 1,67
360
14,17
245
9,65
XD
XE
Schema per
ritagliare e
forare il
pannello
4 Fori M6
(1/4 poll.)
SCHEMI DI FORATURA PANNELLO
PER MONTAGGIO IN SUPERFICIE
YB
YA
YC
Dimensioni per montaggio
in superficie
YA
YB
YC
YD
YE
YF
YD
mm poll.
186
7,32
32
1,26
10
0,39
352 13,86
42
1,65
50
1,97
FORI DI MONTAGGIO
Apertura per M6 (0,24 poll.)
YE
YF
15
www.controltechniques.com
16
www.controltechniques.com
XD
m
A2
-
4 Fori
M6 (1/4 poll.)
Schema per
ritagliare
e
forare il
pannello
XB
XA
DISSIPATORI
SOTTO TENSIONE!
XA
XB
XC
XD
poll.
16,54
15,95
12,21
11,63
H
YD
YC
YE
M6 (0,24 poll.)
MESSA A TERRA
(massa)
PRIGIONIERO SU
FACCIA ANTERIORE
PIASTRA DI
SUPPORTO
SCATOLA VENTOLA
DISSIPATORE
4 FORI
M8 (0,32 poll.)
YB
YA
MONTAGGIO
IN SUPERFICIE
M
Terminale
di terra
(massa)
M350
M350R
VENTOLE
K
Tutti i fori
delle viti dei
terminali12 sono
M12 (0,47 poll.)
c
a
L
A
B
C
D
E
F
G
H
J
K
L
M
d
b
c
e
h
f
poll.
17,72
3,35
5,51
14,29
8,86
4,41
1,18
11,54
11,02
15,95
16,65
1,18
poll.
1,10
1,69
0,92
1,50
1,37
2,56
3,15
2,09
2,68
0,98
2,36
Dimensioni
terminali
mm
450
85
140
363
225
112
30
293
280
405
423
30
Dimensioni
unità
mm
a 28
b 43
c 23
d 38
e 35
f 65
g 80
j h 53
j 68
k 25
m 60
g
M700, M700R,
M825, M825R
Aletta terminale
40 x 10
DETTAGLI TERMINALI
MONTAGGIO
IN SUPERFICIE
M420
M420R
M550
M550R
M700
M700R
M825
M825R
VENTOLE
M350, M350R,
M420, M420R,
M550, M550R
Aletta terminale
30 x 6
NOTA i dissipatori di calore sono sotto tensione.
Dimensioni per
montaggio
in superficie
mm poll.
YA 496 19,53
YB 472 18,58
62
2,44
YC
8,86
YD 225
YE 347 13,66
mm
420
405
310
295,5
M350
M350R
M420
M420R
MONTAGGIO A
PANNELLO PASSANTE
Dimensioni per
montaggio a
pannello passante
D
UNITÀ DA M350 a M825 e da M350R al M825R
XC
k
A1
+
FLUSSO ARIA
Non in scala
Dimensioni metriche esatte
Dimensioni in pollici calcolate
Figura 5-4 Dimensioni dei convertitori da M350(R) a M825(R)
Guida Mentor ll dell'utente
Versione numero: 13
Figura 5-5 Dimensioni dei convertitori da M900(R) a 1850(R)
Non in scala
Dimensioni metriche esatte
Dimensioni in pollici calcolate
FLUSSO ARIA
Terminali
INGRESSO
Terminali
USCITA
M
F
G
Unità Mxxx
Dimensioni
H
N
A
B
C
D
E
J
K
J
mm
175
190
175
90
555
poll.
6,89
7,48
6,89
3,54
21,85
K
Unità MxxxR
Dimensioni
C
mm
A 330
B 330
C 330
D 165
E 1015
E
A
C
J
Dimensioni
comuni
B
D
F
G
H
J
K
L
M
N
P
Q
J
L
P
2 fori praticati sulle testine terminali
Distanza 12 mm (0,47 poll.)
FLANGIA POSTERIORE
d
8 fori 7 mm
(0,24 poll.)
a
b
c
d
e
f
g
h
e
g
mm poll.
280 11,02
100 3,94
200 7,87
60 2,36
330 12,99
210 8,27
25 0,98
15 0,59
c
6 fori 7 mm
(0,24 poll.)
h
Dimensioni
flangia posteriore
b
a
b
c
d
e
f
g
h
f
e
g
Le unità da M900 a M1850 e da M900R a M1850R
sono idonee per il solo montaggio in superficie.
Guida Mentor ll dell'utente
Versione numero:
a
Dimensioni
flangia superiore
b
f
c
mm poll.
450 17,72
393 15,47
125
4,92
25
0,98
30
1,18
315 12,40
185
7,28
48,5 1,91
470 18,50
510 20,08
Q
FLANGIA SUPERIORE
a
poll.
12,99
12,99
12,99
6,50
39,96
mm poll.
290 11,42
80 3,15
124 4,88
330 12,99
208 8,19
20 0,79
10 0,39
h
NOTA i dissipatori di calore sono sotto tensione.
17
www.controltechniques.com
6
Collegamenti elettrici
6.1.6
6.1
Criteri per l'installazione
6.1.1
Sicurezza
I circuiti di controllo esterni in c.a., per esempio i contattori, devono
essere alimentati (da due fasi qualsiasi dell'alimentazione) attraverso un
trasformatore di isolamento dotato di uno schermo di messa a terra fra il
primario e il secondario, come mostrato nella Figura 6-2 e Figura 6-3.
Il cablaggio di controllo deve essere collegato allo stesso punto di terra
(massa) se possibile, oppure occorre provvedere per assicurare che
l'impedenza dell'anello di terra (massa) sia conforme a un codice di
comportamento autorizzato.
AVVERTENZA
6.1.2
Rischio di folgorazione!
AVVERTENZA
6.1.3
Ubicazione
L'ubicazione dei componenti principali è mostrata nella Figura 6-1.
Figura 6-1
Scheda di circuiti
stampati MDA1 (coperchio
con cerniera interna)
e accesso alla scheda
a tiristori (SCR)
Il contenitore del convertitore è conforme alla specifica
internazionale IP00 sui contenitori ed è idoneo per il
montaggio all'interno di armadi con certificazione NEMA.
Occorre considerare l'ubicazione e l'accesso al convertitore
stesso in base ai regolamenti locali sulla sicurezza
applicabili al tipo di installazione.
Aree pericolose
AVVERTENZA
6.1.5
6.1.7
Una volta che il convertitore è stato collegato
all'alimentazione di rete in c.a., occorre SCOLLEGARLO e
ISOLARLO prima di potere procedere a qualsiasi intervento
che richieda la rimozione di una copertura. Per consentire il
completo scaricamento dei condensatori interni, DEVONO
trascorrere 2 minuti dopo l'isolamento dalla rete di
alimentazione. Finché tale periodo di tempo non è trascorso,
nel modulo possono infatti essere presenti tensioni
pericolose.
Le persone addette alla supervisione e all'installazione o alla
manutenzione dell'impianto elettrico devono possedere una
qualifica professionale e una competenza specifiche. A tal
fine, il personale incaricato di tali operazioni deve essere
messo nelle condizioni di potere studiare attentamente
questa Guida dell'utente prima di iniziare il ciclo di lavoro e,
se necessario, di discuterne con i propri responsabili.
Protezione delle aperture
PRECAUZIONE
6.1.4
Le tensioni presenti nei cavi di alimentazione, nei cavi e nei
terminali di uscita, nel cablaggio dell'alimentazione di
comando e in certe parti interne del convertitore possono
causare gravi scosse elettriche ed essere mortali.
Messa a terra (a massa) del sistema di
controllo
L'applicazione di convertitori a velocità variabile di tutti i tipi
può rendere nulla la certificazione di area pericolosa
(Gruppo di apparati e/o Classe di temperatura) di motori con
protezione esterna. L'approvazione e la certificazione
devono essere ottenute per l'intera installazione del motore
e del convertitore. (Vedere anche sezione
5.2.1 Ubicazione a pagina 13)
Scheda di circuiti stampati MDA2,
per collegamenti (ponticelli) LK,
interruttori, potenziometri e terminali
di controllo esterni, vedere la Figura 6-4.
Ubicazione dei componenti principali
Messa a terra (messa a massa)
AVVERTENZA
Per i convertitori dotati di dissipatori di calore isolati, le
considerazioni di sicurezza richiedono che questi ultimi
siano opportunamente collegati a terra. (Vedere anche
sezione 5.2 Montaggio a pagina 13)
Si raccomanda di collegare saldamente a terra (massa)
qualsiasi componente metallico in grado di essere messo
accidentalmente sotto tensione.
L'impedenza di terra (massa) deve essere conforme ai
requisiti previsti dai regolamenti locali sulla sicurezza
nell'industria e deve essere verificata e provata a intervalli
regolari e appropriati.
18
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
LC
B
Y
Guida Mentor ll dell'utente
Versione numero:
www.controltechniques.com
L12
L11
LR
LC
LF
A1
A2
L1 L2 L3
F1
F2
E1 E2 E3
9
0V
10
+10 V
1
0V
8 40
0V
3 20
Velocità
impostata
manualmente
LC
RR
31
RR
37
MBS
STOP
AVVIAMENTO
25 21
39
RL1
Convertitore
pronto
Massa
Quandrante singolo
M
T
M T
Fusibili solo per protezione cablaggio
Occorre solo collegare E2 al ponte di campo nord americano
e per l'alimentazione di campo sulle unità da M350(R)
a M1850(R)
LR Reattori di linea
Terminali
LC Contattori di linea
Funzione
LF Fusibili di linea
31 Abilitazione
LK Collegamento (ponticello)
21 Consenso marcia
MBS Motorino ventilatore motore 25 Marcia avanti
MT Interruttore termico motore
RR Relè di marcia
T
Generatore tachimetrico
(Tachimetro)
R
LC
RR
RR
LC
LK
Ventilatore
motore
B
MBS
6.2
Vedere la Figura 6-2 e la Figura 6-3.
Figura 6-2 Collegamenti di alimentazione per la configurazione a
quadrante unico
Collegamenti di alimentazione
L'accesso ai terminali di alimentazione dei convertitori con valori
nominali bassi si ottiene aprendo lo sportellino anteriore, fissato con due
viti trattenute nei due angoli superiori e incernierato nel lato inferiore
(Figura 6-1). I modelli con potenza nominale superiore dispongono di
alette dei terminali accessibili dall'esterno.
19
LC
20
www.controltechniques.com
L12
L11
LR
LC
LF
A1
M
A2
L1 L2 L3
F1
F2
E1 E2 E3
9
T
0V
M T
0V
8 40
0V
+10V
10
3 20
1
Velocità
impostata
manualmente
Fusibili solo per protezione cablaggio
Occorre solo collegare E2 al ponte di campo nord americano
e per l'alimentazione di campo sulle unità da M350(R)
a M1850(R)
LR Reattori di linea
Terminali
LC Contattori di linea
Funzione
LF Fusibili di linea
31 Abilitazione
LK Collegamento (ponticello)
21 Consenso marcia
MBS Motorino ventilatore motore 25 Marcia avanti
MT Interruttore termico motore
RR Relè di marcia
T
Generatore tachimetrico
(Tachimetro)
B
Y
R
LC
25 21 37
MBS
STOP
RR
AVVIAMENTO
RR
31
39
RL1
Convertitore
pronto
Massa
LC
RR
LC
LC
35
RL2
Velocità
zero
34
Quandrante singolo
RR
LK
Ventilatore
motore
B
MBS
6.2.1
Non appena il convertitore viene acceso, verificare che la direzione di
rotazione sia quella richiesta. Qualora non lo fosse, scambiare i
collegamenti sull'indotto o sul campo (ma non entrambi). In presenza di un
encoder o di un generatore tachimetrico (tachimetro) per la retroazione,
occorre invertire il senso dei segnali per ottenere la corrispondenza.
Rotazione del motore
Le opzioni di controllo del convertitore possono in alternativa essere
utilizzate per invertire la direzione di rotazione.
Figura 6-3 Collegamenti di alimentazione per la configurazione a
quattro quadranti
Guida Mentor ll dell'utente
Versione numero: 13
6.2.2
Soppressione di sovratensioni
Le categorie di resistenza alle sovratensioni sono le seguenti:
Il convertitore Mentor II presenta componenti per la soppressione di
sovratensioni che proteggono i tiristori dagli impulsi di alta tensione
(transitori o picchi transitori) che si producono fra le fasi a causa di
fulmini ecc. Esso è inoltre stato progettato per resistere a impulsi oltre
4 kV fra le fasi e la terra.
In regioni con elevata frequenza di fulmini, soprattutto dove si utilizzano
alimentazioni a triangolo messe a terra, si raccomanda di installare una
protezione supplementare esternamente fra le fasi e la terra.
Tale risultato si ottiene generalmente utilizzando dei MOV (varistori).
Una configurazione possibile è mostrata nella Figura 6-4.
Figura 6-4 Soppressione delle sovratensioni
Reattori di linea
Alimentazione
Al convertitore
I
Circuiti protetti con soppressione delle sovratensioni transitorie
II
Alimentazioni di rete generali negli edifici per l'impiego di
elettrodomestici
III
Installazioni fisse con connessione permanente all'alimentazione
IV
Dispositivo dell'alimentazione all'interno dell'edificio (per es. il
contatore della società erogatrice ecc.)
6.3
Resistori di carico per la retroazione
della corrente
Per consentire l'utilizzo di un motore con potenza nominale inferiore al
convertitore, occorre riscalare la retroazione della corrente cambiando i
resistori di carico R234 e R235 (oppure, nel caso di un convertitore di
taglia M350 e superiori, i tre resistori R234, R235 e R245) montati sulla
scheda di potenza. Le equazioni seguenti forniscono il valore
appropriato della resistenza. I resistori sono collegati in parallelo.
Dove Imax è il 150% della corrente nominale a pieno carico del motore:
Per i convertitori M25 fino al M210R (fino a un'uscita di 210 A c.c.) e per
le schede di circuiti stampati MDA75, MDA75R, MDA 210 e MDA210R:
400
Rtotal = ----------I max
Massa
La tensione nominale in c.a. dei MOV può raggiungere i 550 V ed è
idonea per tutte le tensioni di alimentazione fino a 660 V +10%.
Assicurarsi che i MOV abbiano caratteristiche nominali tali da resistere a
sovracorrenti transitorie di almeno 3 kA per sovratensioni standard
(tensione di 1,2/50 µs o corrente di 8/20 µs). I fili di collegamento ai MOV
devono essere corti (ovvero inferiori a 6 pollici / 15 cm) al fine di evitare
ulteriori sovratensioni causate dall'induttanza nel cablaggio dovuta al
rapido aumento della corrente.
Per i convertitori M350 e superiori e per la scheda di circuiti stampati
MDA6, si utilizzano i tre resistori di carico R234, R235 e R245 in
parallelo:
1600
Rtotal = ------------I max
Esempio di calcolo dei valori dei resistori di carico per la
retroazione della corrente
Per un convertitore M350 e un motore da 200 A:
L'uscita della corrente a pieno carico (Tabella 1) è di 350 A
La corrente massima è di 350 x 1,5 A
Resistenza totale di carico:
1600
Rtotal = ------------------------ = 5.33Ω
200 × 1,5
1
1
1
1
------------------- = -------------- + -------------- + -------------Rtotal
R234 R235 R245
Si raccomanda l'utilizzo di MOV approvati da un'agenzia sulla sicurezza
quale la UL e, in alcune regioni, il loro impiego è essenziale per motivi
legali e di copertura assicurativa.
6.2.3
Categoria di sovratensione e soppressione
delle sovratensioni transitorie
Dalle tabelle dei valori standard dei resistori, trovarne tre che forniscono
la più piccola approssimazione.
Il convertitore Mentor II è provvisto di ampi dispositivi per la
soppressione di sovratensioni transitorie e presenta opportune distanze
per la sicurezza elettrica. È in grado di resistere a sovratensioni di 4 kV
sia fra le fasi sia fra le fasi e la terra.
Per esempio, se :
R234 = 12Ω
R235 = 12Ω
R245 = 47Ω
La versione da 480 V del convertitore può essere collegata a un sistema
di alimentazione con resistenza alle sovratensioni di categoria III
(come specificato nella IEC664-1). Questo significa che è idoneo per il
collegamento permanente a qualsiasi sistema di alimentazione, salvo a
un'installazione all'aperto. Per l’installazione all'aperto, si raccomanda di
installare una protezione supplementare contro le sovratensioni.
Le versioni da 525 V e da 660 V possono essere collegate a un sistema
di alimentazione con resistenza alle sovratensioni di categoria II. Per il
collegamento permanente diretto a sistemi di alimentazione industriali,
occorre fornire una soppressione supplementare delle sovratensioni fra
le fasi e la terra. A tale riguardo, sono largamente reperibili dispositivi
idonei per la soppressione di sovratensioni che utilizzano varistori a
semiconduttore metallo-ossido (MOV). Tale misura di protezione non è
richiesta nei casi in cui il convertitore sia provvisto di un trasformatore di
isolamento.
La potenza nominale di ogni resistore di carico viene di volta in volta
calcolata con l'equazione seguente:
I contatti dei relè di stato sono studiati per una resistenza alle
sovratensioni di categoria II a 240 V.
Se l'ondulazione di corrente misurata sul terminale 11 è minore di 0,6 V
picco-picco, si può incrementare il valore dei resistori di carico
(a condizione che si utilizzi la versione software V5.1.0 (o successiva))
per il fattore 1,6. Qualora si incrementino i valori dei resistori di carico,
occorre impostare il parametro 05.29 su 1.
2
V
Potenza ( W ) = -----R
e dove la tensione nei tre resistori in parallelo è di 1,6 V, la potenza
assorbita è:
2
1.6
R234 e R235: ----------- = 0,213 W
12
una potenza nominale di 0,5 W o di 0,6 W è adeguata
2
1.6
R245: ----------- = 0,055 W
47
una potenza nominale di 0,25 W è adeguata
NOTA
Guida Mentor ll dell'utente
Versione numero:
N
21
www.controltechniques.com
I valori dei resistori di carico non devono essere aumentati per il fattore
1,6 se l'ondulazione di corrente misurata sul terminale 11 è maggiore di
0,6 V, in quanto il convertitore funzionerà meglio con i valori standard.
6.4
Collegamenti dei terminali di controllo
Vedere la Figura 6-2, Figura 6-3, Figura 6-5 e Figura 6-6, nonché la
sezione 6.5 Elenco dei terminali a pagina 23 e la sezione
6.6 Classificazione dei terminali a pagina 24.
AVVERTENZA
Isolamento
I circuiti e i terminali di controllo sono isolati dai circuiti di
alimentazione unicamente mediante un isolamento
standard in conformità alla norma IEC664-1. L'installatore
deve accertarsi che tutti i circuiti esterni di controllo non
possano accidentalmente essere toccati dal personale
ricoprendoli con almeno uno strato isolante classificato per
le tensioni di alimentazione in c.a.
Figura 6-5 Ubicazione dei componenti principali sulla scheda di
circuiti stampati MDA2B, versione 2 (revisione)
SW1A
SW1B
SW1C
SW1D
=
=
=
=
Pos
+5 V
+12 V
+15 V
SW1F = 10 - 50 V
SW1G = 50 - 200 V
SW1H = 60 - 300 V
MDA2B
PL6
PL5
MD29
(Opzione)
SW1A
SW1B
SW1C
SW1D
RV1
SW1F
SW1G
SW1H
LK1
{
PL4
PL3
R10
R12
R11
TB2
TB1
1 +10V CORRENTE 11
DAC1 12
2 -10V
3 VELOCITÀ DAC2 13
DAC3 14
4 GP1
ST1 15
5 GP2
ST2 16
6 GP3
ST3 17
7 GP4
ST4 18
8 TERM.
ST5 19
9 TACHIM.
10 TACHIM.+0 V 0 V 20
TB3
21 F1(STOP)
22 F2(IR)
23 F3(IF)
24 F4(RR)
25 F5(RF)
26 F6
27 F7
28 F8
29 F9
30 F10
TB4
31
RESET 32
+24 V 33
POLO 34
NC 35
NA 36
POLO 37
NC 38
NA 39
0 V 40
ABILIT.
R6
PL2
SK3
Encoder retroazione
Porta seriale
R6, R10, R11, R12 devono presentare la
stessa impedenza caratteristica del cavo
(circa 120 per il doppino)
Montanti di montaggio
(isolatori portanti) per i
resistori di terminazione
Potenziometro generatore tachimetrico (tachimetro)
22
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
6.5
Elenco dei terminali
I terminali sono ubicati sulla scheda di circuiti stampati MDA2B,
Figura 6-1 e Figura 6-5.
Terminale
Descrizione
Tipo
1
+10 V
Alim. di riferimento
2
-10 V
Alim. di riferimento
3
Riferimento di velocità
Ingresso analogico
Sì
GP1, GP2, GP3, GP4 per uso generale
Ingressi analogici
Sì
Morsettiera
Numero
TB1
4, 5, 6, 7
TB2
8
Termoresistore per il motore
Ingresso analogico
9
Generatore tachimetrico (tachimetro) negativo
Ingresso analogico
10
Generatore tachimetrico (tachimetro) positivo (0V)
Ingresso analogico
11
Corrente
Uscita analogica
12
DAC1
Uscita analogica
Sì
13
DAC2
Uscita analogica
Sì
14
DAC3
Uscita analogica
Sì
Uscite a collettore aperto
Sì
15, 16, 17, 18, 19 ST1, 2, 3, 4, 5
TB3
20
0V
21
F1 Consenso marcia
Ingresso digitale
22
F2 Jog inverso
Ingresso digitale
Sì
23
F3 Jog avanti
Ingresso digitale
Sì
24
F4 MARCIA inversa (autotenuta)
Ingresso digitale
Sì
25
F5 MARCIA avanti (autotenuta)
Ingresso digitale
Sì
Ingressi digitali
Sì
26, 27, 28, 29, 30 F6, 7, 8, 9, 10
TB4
Programmabile
31
ABILITAZIONE
Ingresso digitale
32
RESET
Ingresso digitale
33
Alimentazione +24 V relè
34
Polo
Uscita relè (ST6)
Sì
35
Contatto normalmente chiuso
Uscita relè (ST6)
Sì
36
Contatto normalmente aperto
Uscita relè (ST6)
Sì
37
Polo
Relè convertitore pronto
38
Contatto normalmente chiuso
Relè convertitore pronto
39
Contatto normalmente aperto
Relè convertitore pronto
40
0V
PL5
Numero
Funzione
Numero
Funzione
Numero
Funzione
1
+10 V
11
Corrente
21
F1
2
-10 V
12
DAC1
22
F2
3
Rif. velocità
13
DAC2
23
F3
4
GP1
14
DAC3
24
F4
5
GP2
15
ST1
25
F5
6
GP3
16
ST2
26
F6
7
GP4
17
ST3
27
F7
8
Termistore (interruttore termico)
18
ST4
28
F8
9
NC
19
ST5
29
F9
10
0V
20
0V
30
F10
Guida Mentor ll dell'utente
Versione numero:
31
ABILITAZIONE
32
RESET
33
24 V esterna
34
0V
23
www.controltechniques.com
6.6
Classificazione dei terminali
6.6.7
6.6.1
Uscite analogiche
Il canale A deve guidare il canale B per la rotazione in avanti.
Morsettiera TB2, terminali da 11 a 14 compreso.
Indicazione della corrente d'indotto, capacità di 5 mA del convertitore.
Tre uscite non dedicate, capacità di 5 mA del convertitore. Campo della
tensione di uscita da -10 V a +10 V.
6.6.2
Ingressi analogici
Morsettiera TB1, terminali da 3 a 10 compreso.
Cinque uscite non dedicate, impedenza di 100 kΩ. Campo della
tensione di ingresso da -10 V a +10 V.
Ingressi dedicati per il termoresistore per il motore o per il termostato
(livello di allarme 3 kΩ, reset 1,8 kΩ circa) e retroazione del generatore
tachimetrico (tachimetro).
6.6.3
Uscite digitali
Morsettiera TB2, terminali da 15 a 19 compreso.
Morsettiera TB4, terminali da 34 a 39 compreso.
Cinque uscite a collettore aperto non dedicate.
Assorbimento massimo di corrente 100 mA.
Un'uscita dedicata per relè.
Uscita dedicata per il relè di convertitore pronto.
Corrente massima per relè a:
250 V c.a. 2,2 A
110 V c.a. 5 A
5 V c.c.
5A
Quando si utilizzano uscite digitali con un'alimentazione esterna di 24 V
e un carico esterno, come una bobina di relè, occorre collegare un diodo
a effetto volano attraverso il carico.
Si raccomanda che l'alimentazione esterna non sia inserita quando il
Mentor II non è acceso.
6.6.4
Uscite programmabili
Morsettiera TB2
Terminali da 12 a 14 compreso
Terminali da 15 a 19 compreso
Morsettiera TB4
Terminali da 34 a 36 compreso
6.6.6
Analogiche
A collettore aperto (digitali)
Relè
Ingressi programmabili
Morsettiera TB1
Terminali da 3 a 7 compreso
Morsettiera TB3
Terminali da 22 a 30 compreso
Connessioni per:
Encoder
Comunic. seriali
Polo
Riferimento
PL4
Retroazione
SK3/PL3*
PL2
1
0V
0V
0 V isolato
2
NC
Alimentazione
/TX
3
A
A
/RX
4
/A
/A
NC
5
B
B
NC
6
/B
/B
TX
7
NC
NC
RX
8
C
C
NC
9
/C
/C
NC
10
0V
0 V (NON SK3)
•
•
•
PL3 è collegato in parallelo a SK3
PL4 è un settore a 10 vie per l'encoder di riferimento
SK3 è una presa femmina a 9 vie di tipo D per l'encoder di
retroazione
Figura 6-6 Collegamenti dei terminali di controllo
Ingressi digitali
Morsettiera TB3, terminali da 21 a 30 compreso.
Morsettiera TB4, terminali 31, 32.
Nove ingressi non dedicati, impedenza di 10 kΩ.
Segnale di abilitazione convertitore - agisce direttamente per sicurezza
sui circuiti di uscita porta-impulso. Ritardo di 30 ms fra la rimozione del
segnale di abilitazione e l'innesco dell'inibizione. Il controllo di
abilitazione del convertitore viene interbloccato internamente con
segnali di rilevamento anomalia per la massima sicurezza.
Consenso marcia
Ingresso di reset del convertitore per il controllo esterno.
Logica degli ingressi selezionabile - livello alto attivo o livello basso
attivo. Tensione dei circuiti +24 V.
Predisposizione di ingressi da due encoder.
Marcia avanti e marcia inversa, con autotenuta.
6.6.5
Encoder (tachimetro a impulsi) - Riferimento e
retroazione
TB1
TB3
+10 V (5 mA)
1
F1 Marcia
21
-10 V (5 mA)
2
F2 Jog inverso
22
Riferimento
3
F3 Jog avanti
23
GP1
4
F4 Marcia inversa
24
GP2
5
F5 Marcia avanti
25
GP3
6
F6
26
GP4
7
F7
27
Termostato
8
F8
28
Tachimetro
9
F9
29
0V
10
F10
30
TB2
_ 10 V
da 0 a +
_ 10 V
da 0 a +
_ 10 V
da 0 a +
_ 10 V
da 0 a +
T
TB4
Corrente
11
Abilitato
31
DAC1
12
Reset
32
DAC2
13
+24 V (200 mA)
33
DAC3
14
ST1
15
ST2
16
ST3
17
ST4
18
ST5
19
0V
20
34
35
N/A
36
37
38
Stato convertitore
(normale)
0V
39
40
Analogiche
Digitali
GP 100 k poll.
DAC 5 mA max
ST
100 mA max
24
www.controltechniques.com
Programmabile
F 10 k impedanza d'ingresso
Relè 240 V c.a. 2,2 A
Resistore di pull-up
Guida Mentor ll dell'utente
Versione numero: 13
7
Procedure operative
7.1
Tastiera e display
7.1.1
Tastiera
Figura 7-1 Tastiera
Convertitore pronto
Convertitore digitale in c.c.
Allarme
Velocità zero
ISTRUZIONI
Marcia avanti
DATI
Marcia inversa
Ponte 1
Ponte 2
In velocità
MENU
PARAMETRO
Limite di corrente
MODO
REGOLA MENU
RESET
REGOLA PARAMETRO
La tastiera ha due scopi:
7.1.2
1. Consente all'operatore di configurare il convertitore per adattarlo ad
applicazioni particolari e di cambiarne il comportamento in vari modi,
per esempio modificando i tempi di accelerazione e di
decelerazione, i livelli preimpostati di protezione e così via.
1. Indice
Il display inferiore a quattro cifre mostra il numero del menu alla
sinistra del punto decimale permanente e il numero del parametro a
destra.
Nel rispetto di considerazioni di sicurezza, le regolazioni possono
essere apportate con il convertitore in funzione o fermo. Se il
convertitore è in funzione, le nuove impostazioni avranno effetto
immediato.
2. Fornisce informazioni esaurienti sulle impostazioni e lo stato
operativo del convertitore, nonché ampie informazioni diagnostiche
se il convertitore va in allarme.
Per la regolazione dei parametri, la tastiera è provvista di cinque tasti,
Figura 8-1. Per selezionare un menu (gruppo funzionale di parametri),
utilizzare i tasti SINISTRA o DESTRA. Il numero del menu viene
visualizzato a sinistra del punto decimale nella finestra Indice.
Per selezionare un parametro dal menu prescelto, utilizzare i tasti SU o
GIÙ. Il numero del parametro compare alla destra del punto decimale
nella finestra Indice e il suo valore viene mostrato nella finestra Dati.
Per accedere al valore del parametro al fine della sua modifica, premere
il tasto MODE (MODO) una volta. Se l'accesso è consentito, il valore
lampeggia.
Regolare il valore agendo sui tasti SU o GIÙ. Per una regolazione
rapida, mantenere premuto il tasto.
Per uscire dal modo di regolazione, premere nuovamente il tasto MODE.
Memorizzare (renderli efficaci in modo permanente) i valori dei parametri
dopo le regolazioni, altrimenti andranno persi allo scollegamento del
convertitore dalla rete di alimentazione. Per memorizzare i valori,
impostare il Parametro 00 = 1 e premere RESET.
Guida Mentor ll dell'utente
Versione numero:
Display
2. Dati
Il display superiore a quattro cifre indica il valore del parametro
selezionato. Al succedersi dei numeri di parametro, il valore attuale
del parametro corrispondente viene visualizzato sul display dati.
I parametri numerici hanno valori compresi fra 000 e 255, 000 e
+1999, o 000 e 1000. Per i valori delle unità di misura dei parametri,
per esempio volt, giri/min. ecc., vedere il Capitolo 6.
I valori dei parametri bit sono visualizzati con 0 o 1, preceduto da
una b. La prima cifra per parametri interi (da 0 a 255) è un F .
3. Indicatori di stato
Nove LED, situati a destra dei display relativi ai dati e agli indici dei
parametri, forniscono informazioni continuamente aggiornate sulle
condizioni di funzionamento del convertitore e permettono all'utente
di rilevare immediatamente con lo sguardo le informazioni base.
Accensione a LED Informazioni
Convertitore pronto
Il convertitore è acceso e non è andato in allarme
Convertitore pronto
lampeggiante
Il convertitore è andato in allarme
Allarme
lampeggiante
Il convertitore è in allarme per sovraccarico o si
sta integrando nella regione I x t
Velocità zero
Velocità del motore < soglia di velocità zero
(programmabile)
Marcia avanti
Rotazione del motore in avanti
Marcia inversa
Rotazione del motore all'indietro
Ponte 1
Ponte di uscita 1 abilitato
Ponte 2
Ponte di uscita 2 abilitato
(inattivo nei convertitori a 1 quadrante)
In velocità
Il motore ruota alla velocità richiesta dal
riferimento di velocità
Limite di corrente
Il motore ruota e fornisce la corrente massima
consentita
25
www.controltechniques.com
7.2
Approntamento del convertitore per il
funzionamento
Installare il convertitore ed effettuare i collegamenti di alimentazione e di
controllo secondo quanto descritto nel Capitolo 8 Serie di parametri e
nelle Figura 6-2, Figura 6-3 e Figura 6-5. Prima di utilizzare il
convertitore, si devono eseguire o prendere in considerazione altre
connessioni e impostazioni (alcune opzionali).
dove Vmax = tensione tach. a piena velocità.
4. Impostare LK1 nella posizione FEEDBACK (RETROAZIONE) e
tarare in modo preciso RV1 con il motore a una velocità compresa
fra metà e tre quarti del valore massimo.
Tali azioni sono riepilogate di seguito:
Azione
Riferimento
Preimpostare il collegamento
(ponticello) LK1 e gli interruttori
sezione 7.2.1
Preimpostare il potenziometro
regolabile, se è stato selezionato il
generatore tachimetrico (tachimetro)
sezione 7.2.2
Regolare i parametri di
funzionamento come appropriato per
l'applicazione
sezione 8.1 Modifica dei
parametri a pagina 29
Autotaratura dell'anello di corrente
parametro 05.09
Regolare la scalatura della
retroazione di campo
parametro 06.11
Assegnare il codice di sicurezza
opzionale
sezione 8.2 Sicurezza a
pagina 31
7.2.1
Procedura per la regolazione
1. Selezionare la gamma appropriata del generatore tachimetrico
utilizzando SW1.
2. Impostare LK1 nella posizione ADJUST (REGOLARE).
3. Regolare RV1 finché il valore del parametro 03.02 (Retroazione
della velocità) non è:
10,000
03.02 = -----------------V max
7.3
Collegamento LK1 (ponticello) e interruttori
Il collegamento LK1 (ponticello) e il blocco interruttori sono ubicati sulla
scheda di circuiti stampati MDA2B (Figura 6-5), accessibile rimuovendo
la copertura a scatto anteriore inferiore (Figura 6-1).
Comando Scopo
SW1A
Polarità degli ingressi di
logica. La MDA2B è
contrassegnata con POS. e
NEG. per indicare le posizioni
di SW1A.
Pos. = 24 V
Neg. = 0 V.
SCOLLEGARE
L'ALIMENTAZIONE
PRIMA DI COMMUTARE
SW1H
da 60 V a 300 V
Campo di retroazione del
generatore tachimetrico
(tachimetro)*
SW1G
da 50 V a 200 V
Campo di retroazione del
generatore tachimetrico
(tachimetro)*
SW1F
da 10 V a 50 V
Campo di retroazione del
generatore tachimetrico
(tachimetro)*
LK1
Collegamento (ponticello)
regolabile di taratura del
potenziometro del generatore
tachimetrico (tachimetro)
SW1D
+15 V
Selettore tensione di
alimentazione encoder*
SW1C
+12 V
Selettore tensione di
alimentazione encoder*
SW1B
+5 V
Selettore tensione di
alimentazione encoder*
Guida introduttiva
Dati essenziali
Prima di tarare il Mentor II per azionare un carico particolare, raccogliere
le informazioni seguenti dalla targhetta valori nominali del motore, dalla
scheda dati del costruttore e da altre fonti.
I valori dei dati richiesti sono forniti per gli esempi di calcolo seguenti.
• Corrente a pieno carico dell'indotto
67 A
• Tensione dell'indotto
500 V c.c.
• Corrente di campo
1,85 A
• Tensione di campo
300 V c.c.
• Velocità base
1750 giri/min.
• Velocità massima consentita con indebolimento di campo2500 giri/min.
• Il metodo di fornire i dati della retroazione della velocità al
convertitore (di seguito sono considerati vari esempi)
Esempi di calcolo
7.3.1
Corrente d'indotto
Limite di corrente
Il limite di corrente è impostato nel parametro 04.05 solo se il
convertitore non è rigenerativo e in entrambi i parametri 04.05 e 04.06
qualora lo sia.
Il convertitore M75 è tarato per una corrente a pieno carico di 75 A.
Il valore di default (1000) del parametro 04.05 (e 04.06) consente un
limite massimo di corrente del 150% della corrente a pieno carico,
ovvero un valore pari a 1,5 x 75 = 112,5 A.
La corrente a pieno carico per il motore selezionato è di 67 A e se il suo
limite massimo di corrente è del 150%, ovvero un valore normale,
la corrente massima che lo può attraversare è di 100,5 A.
Di conseguenza, occorre regolare il convertitore per una corrispondenza
di valori, altrimenti il motore ne risulterebbe danneggiato. Calcolare il
rapporto come segue:
Corrente
a pieno carico motore67
---------------------------------------------------------------------------------------= ------ = 0,89
Valore nominale convertitore
75
Il valore a fondo scala dei parametri del Limite di corrente, corrispondente
al 150% della corrente a pieno carico del motore, è 1000. L'impostazione
effettiva dei parametri del Limite di corrente è pertanto:
1000 x 0,89 = 890
Impostare 04.05 = 890.
Se il sistema del convertitore è rigenerativo,
impostare anche 04.06 = 890.
* UN SOLO VALORE da selezionare
NOTA
7.2.2
Potenziometro RV1
Vedere la Figura 6-5.
Pot. Scopo
RV1
Regolazione della retroazione del generatore tachimetrico
(tachimetro)
N
Risoluzione della corrente
La potenza nominale del convertitore selezionato è generalmente
superiore a quella del motore, ma non deve esserlo eccessivamente.
Non sarebbe saggio selezionare un rapporto convertitore-motore
inferiore a 2/3 (impostazione del parametro del limite di corrente pari a
600). La risoluzione della retroazione della corrente con un qualunque
rapporto minore di quello indicato non consentirebbe un buon controllo
dell'anello di corrente.
26
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
PRECAUZIONE
Sebbene la risoluzione a fondo scala possa essere
raggiunta cambiando i resistori di carico del trasformatore
di corrente del convertitore, ciò trasformerebbe il
convertitore in un'unità non standard che non viene tenuta
in magazzino. Il rischio è che il convertitore potrebbe
essere sostituito da un'unità standard della stessa potenza
nominale, con potenziali danni permanenti al motore.
Modifiche speciali di questo tipo devono sempre essere
accompagnate da una documentazione esauriente e il
convertitore non standard deve essere contrassegnato da
un'etichetta indelebile.
Sovracorrente I x t
La soglia alla quale l'integrazione di I x t inizia nel parametro 05.06 è
generalmente del 105%.
Il valore a fondo scala del parametro è 1000, corrispondente al 150%,
e quindi:
105 × 1000
05.06 soglia = ----------------------------- = 700
150
Questo valore, come per il Limite di corrente, deve essere regolato per
tenere conto della corrente effettiva a pieno carico del motore
applicando il fattore già calcolato per il Limite di corrente, ovvero 0.89.
Il valore effettivo richiesto per questa combinazione di motore e
convertitore è quindi:
700 x 0,89 =623
Impostare 05.06 = 623
Accesso a questi parametri
Per accedere a questi parametri e impostarne e i valori, selezionare il
parametro 00 e immettere 200.
Si avrà così accesso a tutti i parametri richiesti.
7.3.2
Retroazione della velocità
Retroazione della tensione d'indotto
Per la retroazione della tensione d'indotto, impostare il parametro
03.13 = 1.
Per applicazioni pratiche, deve essere consentita una piccola tolleranza
del 2 o del 3% al di sopra del valore di tensione riportato nella targhetta.
Per una tensione d'indotto di 500 V, impostare il parametro 03.15 = 510
o 520.
Retroazione analogica della velocità
Per la retroazione analogica del generatore tachimetrico (tachimetro),
impostare il parametro 03.13 = 0 (impostazione di default).
I valori di default dei guadagni integrale e proporzionale in anello di
velocità sono generalmente soddisfacenti per la retroazione analogica.
In funzione dell'applicazione, il comportamento caratteristico della
regolazione del carico dei guadagni in anello di velocità può rivelarsi
necessario per ottenere le prestazioni dinamiche ottimali e il
mantenimento della velocità.
Retroazione della velocità dall'encoder (tachimetro a impulsi)
Per la retroazione dell'encoder (tachimetro a impulsi), impostare il
parametro 03.12 = 1.
Il parametro di scalatura 03.14 deve essere regolato affinché
corrisponda al valore di impulsi/giro dell'encoder e alla velocità massima
prevista del motore in giri/min.:
6
750x10
03.14 = ------------------------------------------------------------PPRx ( Max ⋅ giri/min )
Per esempio:
Encoder (tach. a impulsi)
240 imp./giro
Velocità nominale max. motore 1750 giri/min.
Velocità max. richiesta motore 1710 giri/min.
6
750x10
03.14 = --------------------------- = 1827
240x1710
Guida Mentor ll dell'utente
Versione numero:
NOTA
N
Quando questo tipo di retroazione viene applicato, devono essere
considerati numerosi altri fattori. Lo strumento deve essere del tipo a
doppio canale in quadratura con uscite dei driver di linea (utilizzando dei
driver di linea RS485). L'alimentazione interna del Mentor II per
l'encoder (tachimetro a impulsi) può essere selezionata a 5 V, 12 V o 15
V mediante il microinterruttore rosso sulla scheda di circuiti stampati
MDA2B, (vedere la Figura 6-5). Questa alimentazione può fornire
300 mA e non è isolata dal convertitore.
I resistori di terminazione della linea di trasmissione devono essere
installati sui montanti di montaggio (isolatori portanti) presenti nell'angolo
sinistro in basso della scheda di circuiti stampati, Figura 6-5. Questi
resistori aiutano a impedire le riflessioni di linea e a ridurre il rilevamento
di rumore nel ricevitore differenziale sul convertitore.
Quando si utilizza un encoder (tachimetro a impulsi), i guadagni P e I
devono essere regolati inizialmente ai seguenti valori suggeriti
03.09 = 15
03.10 = 5
Il collegamento degli impulsi di riferimento è richiesto unicamente se il
convertitore viene utilizzato in un'applicazione che necessita del
controllo della posizione come l'albero elettrico o l'orientamento del
mandrino. Qualora si utilizzino gli impulsi di riferimento, l'encoder deve
avere allora 1024 impulsi per giro.
7.3.3
Corrente di campo
Abilitare dapprima il Controller di campo.
Impostare il parametro 06.13 = 1.
Campo valori della corrente
Il Mentor II M75 fornisce una gamma valori della corrente di campo di un
massimo di 2 A oppure di 8 A. Vedere la tabella nella descrizione del
parametro 06.11. Nell'esempio prescelto, la corrente di campo massima
è di 1,85 A, cioè >1,5 A e <2 A.
Impostare 06.11 = 204 per selezionare il campo valori corretto.
Corrente di campo massima
Il valore a fondo scala del parametro Corrente di campo max. 06.08 è
1000. La corrente di campo massima dell'esempio prescelto è di 1,85 A.
L'impostazione del parametro 06.08 è:
Corrente di campo max motore
1,85
---------------------------------------------------------------------------------------- = ----------- × 1000 = 925
Intervallo valori campo
2,00
Indebolimento di campo
Poiché l'indebolimento di campo non viene impiegato in questo esempio
particolare, impostare 06.07 = 1000 (default).
Per i dettagli dell'impostazione e del calcolo dell'indebolimento di campo,
vedere la sezione 7.3.4 Indebolimento di campo .
Economia di campo
Per le applicazioni che prevedono che il convertitore si trovi a velocità
zero in assenza di carico (cioè con il motore fermo ma in stand-by) per
alcuni periodi del ciclo di funzionamento, occorre provvedere affinché sia
economizzata la corrente di campo. L'utente può impostare il valore della
corrente di campo ridotta (parametro 06.09) e dell'intervallo di tempo
prima che si produca la riduzione di tale corrente (parametro 06.12).
Per utilizzare l'economia di campo, sono richieste le impostazioni
seguenti:
Abilitazione del time-out economia di campo - impostare 06.15 = 1
Corrente dell'economia di campo
Si supponga che il valore scelto della corrente di campo ridotta sia 0,5 A:
0,5
Corrente di campo ridotta motore
----------------------------------------------------------------------------------------------- = ----------- × 1000 = 270
Corrente di campo max motore
1,85
Impostare 06.09 = 270
27
www.controltechniques.com
Provare l'effetto impostando temporaneamente il parametro Time-out
economia di campo 06.12 su 2 secondi (06.12 = 2). Disabilitare il
convertitore e monitorare il valore di corrente nel parametro 06.03.
Due secondi dopo la disabilitazione del convertitore, si vedrà il valore di
06.03 ridursi fino a quello selezionato di 06.09.
NOTA
Indebolimento di campo
Nell'esempio, la tensione massima dell'indotto è di 500 V c.c. Qualora
sia richiesto l'indebolimento di campo, un'impostazione pratica tipica per
il punto d'intersezione della forza controelettromotrice 06.07 sarebbe da
15 a 20 volt al di sotto della tensione massima d'indotto.
Per esempio,impostare 06.07 = 480.
Con una tensione ridotta, il campo inizierebbe progressivamente a
indebolirsi fino al valore impostato dal parametro 06.10. Poiché
l'impostazione della retroazione della corrente di campo 06.11 in questo
esempio è di 204 - campo valori di 2 A - la corrente minima è una
percentuale selezionata di detta impostazione. Si supponga di avere
selezionato il 90%. Quindi:
Valore selezionato
0,9
------------------------------------------------------------------------ = -------- = 0,45
Impostazione retroazione
2,0
L'impostazione della corrente di campo minima è:
06.10 = 0,45 x 1000= 450
Per il corretto funzionamento, l'indebolimento di campo richiede la
retroazione della velocità. (La retroazione della tensione d'indotto non
sarebbe adeguata per assicurare il controllo.) Quindi, 03.13 sarebbe
impostato a 0 per la retroazione tachimetrica in c.a. o in c.c. e la scalatura
della velocità 03.16 sarebbe impostata a 250, corrispondente alla velocità
massima consentita di 2500 giri/min. del motore. Il parametro 03.03
mostrerà quindi correttamente il regime effettivo del motore.
Qualora si utilizzasse un encoder (tachimetro a impulsi), il parametro
03.12 sarebbe impostato a 1 e la scalatura dell'encoder 03.14 dovrebbe
essere impostata di conseguenza. Il valore di 03.14 dipende da:
Velocità massima del motore richiesta e
Numero di impulsi per giro dell'encoder (tachimetro a impulsi).
7.3.5
NOTA
1. Accendere il convertitore.
2. Impostare il parametro 00 = 200 per garantire la sicurezza.
3. Impostare 05.09 = 1
4. Abilitare il terminale di connessione convertitore TB4-31 a 0 V
N
Regolatore interno di campo
Se il Mentor II viene alimentato con il regolatore interno di campo,
l'economia di campo si trova sotto il controllo automatico del software e
quindi non è richiesto alcun interruttore esterno di controllo ON-OFF del
campo (Figura 6-2 e Figura 6-3). Collegare (mediante ponticello) i terminali
L11 e L12 con del filo in grado di trasportare la corrente di campo.
7.3.4
Procedura di autotaratura
5. Eseguire il salvataggio dei valori dei parametri prima di scollegare il
convertitore. I parametri influenzati dalla procedura di autotaratura
sono quelli dallo 05.12 allo 05.15. (Per la procedura di salvataggio,
vedere la sezione Come salvare il/i valore/i scritto/i a pagina 30.
6. Il convertitore può inoltre effettuare un'autotaratura continua, previa
impostazione del parametro 05.27, che regola i guadagni in anello di
corrente per mantenere ottimizzate le prestazioni di detto anello in
caso di variazioni delle condizioni di carico.
7.3.6
Parametri definiti dall'utente
Sebbene le impostazioni dei parametri seguenti siano opzionali, è
preferibile inserirle in quanto si permette all'utente di vedere valori critici
del convertitore senza doverli ricercare scorrendo varie impostazioni di
menu. Tali impostazioni sono raccolte tutte nel Menu 00
Parametro
Quantità convertitore
Impostazione
Accesso da
11.01
Tensione d'indotto
03,04
00,01
11.02
Corrente d'indotto
05,02*
00,02
11.03
Velocità del motore
03,03
00,03
11.04
Riferimento di velocità
01,02
00,04
11.05
Tensione linea in c.a.
07,06
00,05
* Una lettura diretta della corrente d'indotto può essere trovata nel
parametro 05.02, se 05.05 è impostato con l'appropriato fattore di scala.
Utilizzando le stesse cifre viste in precedenza, per un convertitore M75,
in questo caso l'impostazione sarebbe il 150% di 75 A, 05.05 = 113.
Come per i parametri di configurazione del motore e del convertitore,
eseguire un “Salvataggio dei valori dei parametri” prima di scollegare il
convertitore; vedere la sezione Come salvare il/i valore/i scritto/i a
pagina 30.
Autotaratura dell'anello di corrente
N
La procedura seguente è opzionale e per le applicazioni più generiche
non è richiesta. Tuttavia, se si desidera la risposta dinamica ottimale,
l'anello di corrente, che è l'anello di controllo più interno, deve essere
impostato in modo tale da consentire il funzionamento corretto
dell'anello di controllo esterno (come quello di velocità). Le dinamiche
dell'anello di corrente sono principalmente funzione delle caratteristiche
elettriche di qualsiasi motore particolare.
Il Mentor II presenta una procedura integrata di autotaratura.
Dapprima, il rotore del motore deve essere bloccato oppure il campo
scollegato al fine di consentire al convertitore di iniettare la corrente
all'indotto e determinare le caratteristiche elettriche dell'indotto stesso.
Durante la procedura di autotaratura, non deve essere consentita la
rotazione del rotore. (Normalmente, se il campo è scollegato, il rotore di
un motore con avvolgimento in parallelo non si muoverà.)
I modelli di Mentor II dall'M25 all'M210 contengono un regolatore interno
del campo e non impongono quindi la sconnessione del campo stesso.
28
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8
Serie di parametri
8.1
Modifica dei parametri
Il secondo gruppo contiene i parametri nascosti, chiamati in tale modo in
quanto al Livello 1 di sicurezza non sono visualizzati nel display Indice,
anche se vengono richiamati. Si tratta di parametri richiesti per la
taratura di precisione di un convertitore destinato a operare,
per esempio, in un sistema di processo, generalmente in combinazione
con uno o più convertitori dello stesso tipo o diversi.
8.2
Sicurezza
8.1.2
Indice delle sezioni
8.3
Indice dei parametri
8.4
Descrizione dei parametri
8.5
NOTA
Menu 01
Riferimento di velocità
Menu 02
Rampe
Menu 03
Selezione della retroazione e anello di velocità
Menu 04
Selezione della corrente e limiti
Menu 05
Anello di corrente
Menu 06
Controllo di campo
Menu 07
I/O analogici
Menu 08
Ingressi digitali
Menu 09
Uscite di stato
Menu 10
Logica di stato e informazioni diagnostiche
Menu 11
Varie
Menu 12
Soglie programmabili
Menu 13
Albero elettrico
8.1.3
8.1.4
Serie di parametri
Modifica
Qualsiasi menu e qualsiasi parametro visibile possono essere
selezionati e il valore di quest'ultimo viene visualizzato senza che
occorra inserire un Codice di sicurezza. La procedura è la stessa nel
caso occorra modificare il valore di un parametro, salvo che
normalmente si deve dapprima immettere un codice di sicurezza.
Qualsiasi menu e qualsiasi parametro nascosto possono essere
selezionati e il valore di quest'ultimo viene visualizzato per la lettura e la
scrittura una volta immesso il codice di sicurezza corretto.
N
8.1.1
Organizzazione
I parametri sono organizzati in serie associate alla funzionalità, cioè i
menu, in modo che l'accesso a ogni singolo parametro sia logico e
veloce. I menu sono elencati all'inizio della Sezione 8.2.
Il campo e le unità di misura disponibili dei valori dei parametri reali sono
forniti nell'indice, sezione 8.3, mentre le loro descrizioni sono riportate
nella sezione 8.4. I parametri dei quali non è indicato alcun campo valori
sono parametri bit. Il commento o la spiegazione dei parametri viene
fornita nelle descrizioni, ove necessario.
Modifica dei parametri
I parametri nascosti richiedono sempre un codice di sicurezza di
Livello 2, che può essere anche di Livello 3 (se impostato). Con il/i
codice/i coretto/i, i parametri nascosti RO sono accessibili in lettura e
quelli nascosti RW lo sono in scrittura.
I parametri visibili e nascosti sono distinti nel testo e nei diagrammi delle
logiche di controllo dei menu dall'1 al 9 e 12. I numeri dei parametri
visibili sono indicati con caratteri normali, per esempio 01.01, mentre
quelli nascosti sono riportati in corsivo, per esempio 01.01.
Diagrammi delle logiche dei menu
8.1
Parametri visibili e nascosti
I parametri visibili, sia RO sia RW, sono sempre disponibili per la lettura
quando il convertitore è acceso. I parametri visibili RW sono
generalmente protetti da uno o più livelli di sicurezza e non possono
essere modificati finché non si inseriscono i codici corretti. Questa è la
sicurezza di Livello 1, a meno che e finché non viene impostato un
codice di livello superiore.
I parametri sono di due tipi principali, cioè quelli con valore numerico
(reali) come la velocità e l'accelerazione e quelli digitali o bit. I valori
numerici sono paragonabili ai potenziometri regolabili utilizzati in
convertitori puramente analogici. Sono notevolmente più precisi e non
sono soggetti alla deriva dal valore impostato. I valori bit sono
confrontabili ai collegamenti (ponticelli) o agli interruttori, in quanto
dispongono di una funzione OR.
Ogniqualvolta l'utente ritorna a un menu (fra l'accensione e lo
spegnimento), il software passa immediatamente all'ultimo parametro
selezionato in quel menu. Questa funzione risulta comoda quando si
esegue una serie di modifiche in un gruppo particolare di parametri.
8.1.5
Accesso ai parametri
Inizialmente, alla prima accensione del convertitore e se non è impostata
la sicurezza di Livello 3, è immediatamente consentito l'accesso in
scrittura a un piccolo gruppo di parametri visibili (vedere la sezione
8.2 Sicurezza e il Diagramma generale A della logica di controllo).
Qualora sia impostata la sicurezza di Livello 3, tutti i parametri sono
sempre protetti.
Tutti i parametri, di entrambi i tipi, sono di Sola lettura (RO) o di Letturascrittura (RW).
La serie di parametri di cui sono dotati i convertitori Mentor II è suddivisa
in due ulteriori gruppi per fini di praticità operativa.
I parametri generalmente richiesti per l'impostazione nella fase di
installazione e di avviamento del convertitore possono essere richiamati
ogniqualvolta il convertitore viene collegato all'alimentazione e sono
definiti parametri visibili.
Guida Mentor ll dell'utente
Versione numero:
29
www.controltechniques.com
8.1.6
Procedura
La procedura per la selezione e la modifica di un parametro viene
rappresentata nella Figura 8-1 e descritta nella sezione seguente,
come pure sulla tastiera stessa.
Figura 8-1 Modifica dei parametri e sicurezza di livello 1
Accensione
INDICE
visualizza
00.00
SELEZIONARE
Menu
richiesto
o
Procedura Sicurezza livello 1
SELEZIONARE
Parametro
richiesto
Display DATI =
valore parametro
LETTURA
LETTURA
o
SCRITTURA
?
SCRITTURA
NO
Premere
MODO
M
DATI
LAMPEGGIANTI?
Sì
IMPOSTARE
INDICE a xx.00
(Parametro)
PREMERE MODO
M
IMPOSTARE
DATI a 149
PREMERE
MODO
M
Il parametro è accessibile,
salvo che sia controllato
da un ingresso
programmabile
Il parametro ha la
RO protezione RO o R/W
grazie al Codice
di sicurezza
STATO
CAMBIARE
VALORE
DECISIONE?
Il nuovo
valore è attivo
Con protezione
R/W
Seguire la procedura
di sicurezza
Premere
MODO
Il valore nuovo è PERSO allo spegnimento NO
Il valore nuovo viene CONSERVATO
per l'accensione successiva
M
Memorizza
il nuovo
valore?
SÌ
IMPOSTARE
INDICE a xx.00
(Parametro)
PREMERE MODO
Premere
RESET
La tastiera è pronta per selezionare un altro menu o parametro.
Azione
Tasti
Display
Selezionare il menu
SINISTRO o DESTRO
Indice, a sinistra del
punto decimale
SU o GIÙ
Indice, a destra del
punto decimale
Solo lettura
M
IMPOSTARE
DATI a 001
Procedure per la selezione e la modifica dei parametri
Selezionare il parametro
Legenda
Dati
Modificare il valore solo
se il display lampeggia vedere 8.2
MODO, poi SU o GIÙ
Dati
Immettere valore nuovo
MODO
Dati
La procedura descritta sotto SALVA i valori di tutti i parametri modificati a
partire dal salvataggio precedente.
Come salvare il/i valore/i scritto/i
Azione
Premere GIÙ
Tasti
Display
GIÙ
fino all'indice (par.) xx.00
MODO, poi SU o GIÙ
Dati, valore impostato = 001
Premere RESET
Valore/i salvato/i
Per la maggior parte dei parametri, il convertitore accetta e utilizza il valore
immesso e il motore risponde immediatamente a tale nuovo valore.
L'eccezione è rappresentata da una modifica al valore dei parametri
Velocità di trasm. in baud (11.12), Modo seriale (11.13), Destinazione
soglia 1 (12.07) e Destinazione soglia 2 (12.12). Al fine di consentire al
convertitore di agire in conseguenza al cambiamento apportato, in questi
casi occorre premere RESET dopo avere scritto il nuovo valore.
Qualsiasi valore nuovo immesso non viene tuttavia salvato
automaticamente e andrà perso allo spegnimento.
8.1.7
Impostazioni di default
Per ripristinare le impostazioni dei parametri ai valori di default inseriti in
fabbrica, impostare il parametro X.00 su:
233 per il convertitore a 4 quadranti
255 per i convertitori a 1 quadrante
e premere reset
30
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.2
Sicurezza
8.2.2
Dopo avere selezionato il numero di un parametro e avere premuto
MODE (MODO):
•
Se i dati del parametro lampeggiano, l'utente può modificare il valore
SALVO che il parametro sia già stato configurato per essere
controllato da un ingresso programmabile.
•
Se i dati non lampeggiano, significa che il parametro è di sola lettura
(RO) oppure, se è accessibile in lettura-scrittura (RW), che è
protetto da una sicurezza. Di seguito è descritta la procedura per
accedere ai parametri protetti dalla sicurezza di Livello 1.
Se il codice di sicurezza di Livello 1 non consente l'accesso quando
viene applicato, significa che il parametro è protetto dalla sicurezza di
Livello 3.
I parametri visibili sono sempre accessibili da parte dell'utente in sola
lettura. Salvo che venga immesso il codice di sicurezza di Livello 1,
nella maggior parte i parametri RW non sono accessibili in scrittura.
L'eccezione è costituita, a condizione che non sia stato impostato un
codice di sicurezza di Livello 3, da 24 parametri nei Menu dall'1 al 6 più i
parametri dall'11.01 all'11.10, i quali sono immediatamente accessibili in
scrittura.
8.2.1
•
•
•
•
SU o GIÙ per azzerare l'indice
Premere MODE (MODO)
SU o GIÙ per inserire 149 nei dati (codice di sicurezza di Livello 1)
Premere MODE (MODO)
A questo punto, i parametri RW visibili sono accessibili per l'immissione
di nuovi valori.
8.2.3
•
•
•
•
Sicurezza di Livello 2 per l'accesso ai
parametri RW nascosti
SU o GIÙ per azzerare l'indice
Premere MODE (MODO)
SU o GIÙ per inserire 200 nei dati (codice di sicurezza di Livello 2)
Premere MODE (MODO)
A questo punto, tutti i parametri RW sono accessibili per l'immissione di
nuovi valori.
I parametri RO possono essere letti.
8.2.4
Accensione
I parametri visibili seguenti sono immediatamente accessibili,
NON protetti da una sicurezza di livello 1 e 2
Sicurezza di Livello 1 per l'accesso ai
parametri RW visibili (Figura 8-1)
Abilitazione e inibizione del libero accesso a
TUTTI i parametri
Come annullare la sicurezza:
•
•
•
•
•
•
•
•
Accensione
SU o GIÙ per azzerare l'indice
Premere MODE (MODO)
SU o GIÙ per inserire 200 nei dati (codice di sicurezza di Livello 2)
Premere MODE (MODO)
SINISTRA o DESTRA più SU o GIÙ per impostare l'indice su 11.17
Premere MODE (MODO)
GIÙ per immettere 0
01.05
Riferimento di jog
01.06
Velocità massima avanti
01.09
Velocità massima inversa
01.11
Riferimento ATTIVATO
01.12
Selettore INVERSIONE
01.13
Selettore JOG
02.04
Accelerazione avanti 1
02.05
Decelerazione avanti 1
02.06
Decelerazione inversa 1
02.07
Accelerazione inversa 1
03.09
Guadagno P (proporzionale) in anello di velocità
03.10
Guadagno I (integrale) in anello di velocità
03.11
Guadagno D (differenziale) in anello di velocità
03.14
Scalatura encoder di retroazione
03.15
Tensione massima indotto
03.16
Velocità massima (scalatura giri/min.)
L'utente dispone inoltre di un ulteriore codice di sicurezza privato di
Livello 3. Tale codice è programmabile dall'utente da 1 a 255, A
ECCEZIONE di 149 (il codice di Livello 1). Qualora sia applicato,
ha l'effetto di impedire l'accesso a tutti i parametri finché non si inserisce
il codice di Livello 3 prima di immettere quello di Livello 1 o di Livello 2.
03.17
Compensazione caduta di tensione
Per assegnare il numero del codice di sicurezza di Livello 3:
04.05
Ponte 1 limite I
04.06
Ponte 2 limite I
05.05
Corrente massima (scalata)
06.06
Compensazione caduta di tensione 2
06.07
Punto preimpostato forza controelettromotrice
06.08
Corrente di campo massima 1
06.10
Corrente di campo minima
Se a questo punto si procede al salvataggio dei parametri (vedere la
sezione Come salvare il/i valore/i scritto/i a pagina 30), non viene fornita
alcuna protezione a NESSUN parametro.
Per rirpristinare la sicurezza:
8.2.5
•
•
•
•
•
•
•
•
•
•
e dall'11.01 all'11.10 - Menu utente 00
Del resto dei parametri:
Sicurezza di Livello 3
Accensione
SU o GIÙ per azzerare l'indice
Premere MODE (MODO)
SU o GIÙ per inserire 200 nei dati (codice di sicurezza di Livello 2)
Premere MODE (MODO)
SINISTRA o DESTRA più SU o GIÙ per impostare l'indice su 11.17.
Sul display dei dati compare 149
Premere MODE (MODO)
SU o GIÙ per scrivere un numero qualsiasi di 3 cifre da 1 a 255 nei
dati (fatta eccezione per 149, che è ilcodice di sicurezza di Livello 1)
Premere MODE (MODO)
Salvare (vedere la sezione Come salvare il/i valore/i scritto/i a
pagina 30)
A questo punto, non è consentito l'accesso ad alcun parametro, neppure
in sola lettura, finché non viene immesso il codice di Livello 3 assegnato.
•
I parametri RO sono accessibili in lettura.
•
I parametri RW sono di sola lettura finché non viene immesso un
codice di sicurezza di Livello 1.
Guida Mentor ll dell'utente
Versione numero:
Ripetere la procedura descritta nella sezione 8.2.4, impostando però il
parametro 11.17 = 149 ed effettuando il salvataggio (vedere la sezione
Come salvare il/i valore/i scritto/i a pagina 30).
31
www.controltechniques.com
8.4
Accesso alla sicurezza di Livello 3:
•
•
•
* SINISTRA o DESTRA più SU o GIÙ per azzerare l'indice
*Premere MODE (MODO)
*SU o GIÙ per scrivere il numero del codice assegnato nei dati
(codice di sicurezza di Livello 3)
*Premere MODE (MODO)
•
A questo punto, l'utente ha accesso alla Sicurezza di livello 1 e di
livello 2, una delle quali deve essere immessa successivamente.
8.3
TUTTI i parametri di sola lettura
TUTTI i parametri bit
TUTTI i parametri con un campo da 0 a 255
Inoltre,
Indice dei parametri
dal 2.02 al 2.12
3.15, 3.16
5.05
6.21
dal 7.08 al 7.23
dall'8.12 all'8.20
9.07, 9.09, 9.13, 9.15, 9.19, 9.21, 9.23, 9.25
dall'11.01 all'11.10, 11.18, 11.19, 11.20
12.03, 12.07, 12.08, 12.12
13.14
dal 15.01 al 15.05
15.60, 15.61, 15.62, 15.63
dal 16.01 al 16.05
L'Indice dei parametri elenca i sedici menu, seguiti dai dati base di ogni
parametro della Serie parametri del Mentor II presentato menu per
menu. Per una descrizione dettagliata dei parametri, vedere la sezione
8.6 Descrizioni dei parametri avanzati a pagina 46.
8.3.1
Menu
Elenco dei menu
Descrizione
00
Menu utente - per un rapido accesso ai parametri utilizzati più
frequentemente
01
Riferimento di velocità - selezione della sorgente e dei limiti
02
Rampe di accelerazione e di decelerazione
03
Selezione della retroazione della velocità e anello di velocità
04
Corrente - selezione e limiti
05
Anello di corrente
06
Controllo di campo
07
Ingressi e uscite analogici
08
Ingressi di logica
09
Uscite di stato
10
Logica di stato e informazioni di anomalia
11
Varie
12
Soglie programmabili
13
Albero elettrico
14
Impostazione del sistema MD29
15
Menu delle applicazioni 1
16
Menu delle applicazioni 2
8.3.2
Parametri del Mentor che non possono
essere controllati mediante un
ingresso analogico
8.5
Descrizioni dei parametri
Nelle descrizioni seguenti dei parametri sono utilizzate le abbreviazioni
riportate sotto:
RW
Lettura/scrittura
RO
Sola lettura
Bit
Parametro con soli due stati, 0 o 1
Bi
Bipolare - può avere valori negativi e positivi
Uni
Unipolare - può avere unicamente valori positivi
Int
Intero
Nelle descrizioni dei parametri sono utilizzati i simboli seguenti:
Ö
Ú
valore di default
campo di valori
Le unità di misura sono indicate nella cella in basso a destra.
Parametri - nomi, campi e valori di default
I riferimenti fra parentesi (xx.xx) nella colonna Default indicano i
parametri che assumono il valore predefinito di altri parametri.
I parametri mostrati in grassetto sono quelli liberamente accessibili
SOLO immediatamente dopo l'accensione.
I parametri riportati in corsivo al termine di ogni elenco di menu sono
nascosti. Vedere la sezione 8.1 Modifica dei parametri e sezione
8.2 Sicurezza .
32
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.1
Menu 00: Libreria utente - vedere il Menu 11
Contiene dieci parametri (da 00.01 a 00.10). L'utente imposta i parametri da 11.01 a 11.10 con i numeri dei parametri utilizzati o richiesti più
frequentemente. A questi si può quindi accedere direttamente attraverso i numeri corrispondenti da 00.01 a 00.10, evitando così di dovere richiamare
vari menu.
8.5.2
Menu 01: Riferimento di velocità - selezione della sorgente e dei limiti
Numero
Descrizione
Campo
Tipo
Default
01.01
Riferimento di velocità pre-offset
±1000
RO
01.02
Riferimento di velocità post-offset
±1000
RO
01.03
Riferimento pre-rampa
±1000
RO
01.04
Offset
±1000
RW
01.05
Riferimento di jog
±1000
RW
+ 050
01.06
Velocità massima avanti
da 0 a +1000
RW
+1000
01.07
Velocità minima avanti
da 0 a +1000
RW
+ 000
01.08
Velocità minima inversa
da -1000 a 0
RW
+ 000
01.09
Velocità massima inversa (4Q)
da -1000 a 0
RW
- 1000
da -1000 a 0
RW
000
0o1
RW
1
0o1
RW
0
(1Q)
01.10
Selettore riferimento bipolare (4Q)
(1Q)
+ 000
01.11
Riferimento “ATTIVATO”
0o1
RW
0
01.12
Selettore inversione
0o1
RW
0
01.13
Selettore jog
0o1
RW
0
01.14
Selettore riferimento 1
0o1
RW
0
01.15
Selettore riferimento 2
0o1
RW
0
01.16
Interblocco riferimento zero
0o1
RW
0
01.17
Riferimento 1
±1000
RW
(07.15)
01.18
Riferimento 2
±1000
RW
+ 300
01.19
Riferimento 3
±1000
RW
(07.13)
01.20
Riferimento 4
±1000
RW
(07.14)
Tipo
Default
8.5.3
Menu 02: Rampe di accelerazione e di decelerazione
Numero
Descrizione
Campo
02.01
Riferimento post-rampa
±1000
RO
02.02
Abilitazione rampa
0o1
RW
02.03
Mantenimento della rampa
0o1
RW
0
02.04
Accelerazione avanti 1
da 0 a 1999
RW
+ 050
02.05
Decelerazione avanti 1
da 0 a 1999
RW
+ 050
02.06
Decelerazione inversa 1 (4Q)
da 0 a 1999
RW
+ 050
da 0 a 1999
RW
000
da 0 a 1999
RW
+ 050
da 0 a 1999
RW
000
+ 100
(1Q)
02.07
Accelerazione inversa 1 (4Q)
(1Q)
1
02.08
Accelerazione avanti 2
da 0 a 1999
RW
02.09
Decelerazione avanti 2
da 0 a 1999
RW
+ 100
02.10
Decelerazione inversa 2 (4Q)
da 0 a 1999
RW
+ 100
(1Q)
da 0 a 1999
RW
000
Accelerazione inversa 2 (4Q)
da 0 a 1999
RW
+ 100
(1Q)
da 0 a 1999
RW
000
da 0 a 1999
RW
+ 100
02.11
02.12
Tempo di rampa per jog
02.13
Abilitazione rampa per jog
0o1
RW
0
02.14
Selettore accelerazione avanti
0o1
RW
0
02.15
Selettore decelerazione avanti
0o1
RW
0
02.16
Selettore decelerazione inversa
0o1
RW
0
02.17
Selettore accelerazione inversa
0o1
RW
0
02.18
Selettore rampa comune
0o1
RW
0
02.19
Scalatura rampe (x 10)
0o1
RW
0
Guida Mentor ll dell'utente
Versione numero: 13
33
www.controltechniques.com
8.5.4
Menu 03: Retroazione della velocità - selezione e anello di velocità
Numero
Descrizione
Campo
Tipo
Default
03.01
Richiesta velocità finale
±1000
RO
03.02
Retroazione velocità
±1000
RO
03.03
Retroazione velocità (giri/min.)
±1999
RO
03.04
Tensione d'indotto
±1000
RO
03.05
Uscita compensazione caduta di tensione
±1000
RO
03.06
Errore di velocità
±1000
RO
03.07
Uscita anello di velocità
±1000
RO
03.08
Integrale errore di velocità
±1000
RO
03.09
Guadagno proporzionale in anello di velocità
da 0 a 255
RW
080
03.10
Guadagno integrale in anello di velocità
da 0 a 255
RW
040
03.11
Guadagno derivativo in anello di velocità
da 0 a 255
RW
0
03.12
Selettore retroazione digitale
0o1
RW
0
03.13
Selettore retroazione analogica AV
0o1
RW
0
03.14
Scalatura retroazione dell'encoder
da 0 a 1999
RW
+419
03.15
Tensione massima d'indotto
da 0 a 1000
RW
+600
03.16
Velocità massima (scalatura giri/min.)
da 0 a 1999
RW
+1750
03.17
Compensazione caduta di tensione
da 0 a 255
RW
000
03.18
Riferimento di velocità reale
±1000
RW
(07.11)
03.19
Selettore riferimento di velocità reale
0o1
RW
0
03.20
Selettore abbassamento di tensione
0o1
RW
0
03.21
Selettore uscite rampe
0o1
RW
1
03.22
Offset fine di velocità
da 0 a 255
RW
128
03.23
Soglia di velocità zero
da 0 a 255
RW
16
03.24
Sorgente termine derivativo
03.25
Filtro errore di velocità
03.26
Ingresso generatore tachimetrico
03.27
Riservato
da 1 a 3
RW
1
da 0 a 255
RW
128
±1000
RO
03.28
Guadagno proporzionale x4
0o1
RW
0
03.29
Guadagni in anello di velocità / 8
0o1
RW
0
34
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.5
Menu 04: Corrente - selezione e limiti
Numero
Descrizione
Campo
Tipo
Default
04.01
Richiesta di corrente
±1000
RO
04.02
Richiesta di corrente finale
±1000
RO
04.03
Esclusione limite di corrente
±1000
RO
04.04
Limite di corrente (punto di inizio rastremazione)
da 0 a 1000
RW
+1000
04.05
Limite di corrente Ponte 1
da 0 a 1000
RW
+1000
04.06
Limite di corrente Ponte 2
da 0 a 1000
RW
+1000
04.07
Limite di corrente 2
da 0 a 1000
RW
+1000
04.08
Riferimento di coppia
±1000
RW
+ 000
04.09
Offset di corrente
±1000
RW
+ 000
04.10
Selettore ponte 2 limite di corrente
0o1
RW
0
04.11
Selettore offset di corrente
0o1
RW
0
04.12
Bit 0 modo
0o1
RW
0
04.13
Bit 1 modo
0o1
RW
0
04.14
Abilitazione quadrante 1
0o1
RW
1
04.15
Abilitazione quadrante 2 (4Q)
0o1
RW
1
04.16
Abilitazione quadrante 3 (4Q)
04.17
Abilitazione quadrante 4 (4Q)
(1Q)
0o1
RW
0
04.18
Abilitazione commutazione automatica ponte 2 limite di corrente
0o1
RW
0
04.19
Timer limite di corrente
da 0 a 255
RW
000
04.20
Soglia rastremazione di corrente 1
da 0 a 1000
RW
+1000
04.21
Soglia rastremazione di corrente 2
da 0 a 1000
RW
+1000
04.22
Pendenza rastremazione di corrente 1
da 0 a 255
RW
000
04.23
Pendenza rastremazione di corrente 2
da 0 a 255
RW
000
04.24
Soglia rastremazione 1 superata
0o1
RO
04.25
Soglia rastremazione 2 superata
0o1
RO
(1Q)
(1Q)
Guida Mentor ll dell'utente
Versione numero: 13
0o1
RW
0
0o1
RW
1
0o1
RW
0
0o1
RW
1
35
www.controltechniques.com
8.5.6
Menu 05: Anello di corrente
Numero
Descrizione
Campo
Tipo
Default
05.01
Retroazione della corrente
±1000
RO
05.02
Retroazione della corrente (ampere)
±1999
RO
05.03
Angolo d'innesco
da 277 a 1023
RO
05.04
Limite tempo di variazione
da 0 a 255
RW
040
05.05
Corrente massima (scalatura)
da 0 a 1999
RW
(valore nominale)
05.06
Soglia di sovraccarico
da 0 a 1000
RW
+ 700
05.07
Tempo di integrazione sovraccarico (riscaldamento)
da 0 a 255
RW
030
05.08
Tempo di integrazione sovraccarico (raffreddamento)
da 0 a 255
RW
050
05.09
Abilitazione autotaratura avviamento
0o1
RW
0
05.10
Finecorsa ridotto
0o1
RW
0
05.11
Sovraccarico effettivo
da 0 a 1999
RO
05.12
Guadagno integrale discontinuo
da 0 a 255
RW
16
05.13
Guadagno proporzionale continuo
da 0 a 255
RW
16
05.14
Guadagno integrale continuo
da 0 a 255
RW
16
05.15
Costante del motore
da 0 a 255
RW
25
05.16
Riservato
05.17
Inibizione dell'innesco
0o1
RW
0
05.18
Abilitazione logica di motore fermo
0o1
RW
1
05.19
Modo motore fermo
0o1
RW
0
05.20
Abilitazione controllo diretto angolo d'innesco
0o1
RW
0
05.21
Abilitazione esclusione ponte 2
0o1
RW
0
RW
05.22
Disabilitazione controllo adattativo
0o1
RW
0
05.23
Abilitazione funz. a 12 impulsi in serie a 1 quadrante
0o1
RW
0
05.24
Funzionamento a 12 impulsi in serie
0o1
RW
0
05.25
Funzionamento a 12 impulsi in parallelo
0o1
RW
0
05.26
Commutazione extra-sicura del ponte
0o1
RW
0
05.27
Autotaratura continua
0o1
RW
0
05.28
Isteresi ridotta per commutazione ponte
0o1
RW
0
05.29
Retroazione aumentata della corrente
0o1
RW
0
36
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.7
Menu 06: Controllo di campo
Numero
Descrizione
Campo
Tipo
06.01
Forza controelettromotrice
da 0 a 1000
RO
06.02
Richiesta di corrente di campo
da 0 a 1000
RO
06.03
Retroazione corrente di campo
da 0 a 1000
RO
06.04
Angolo d'innesco
da 261 a 1000
RO
Default
06.05
Uscita compensazione caduta di tensione 2
±1000
RO
06.06
Compensazione caduta di tensione 2
da 0 a 255
RW
000
06.07
Punto preimpostato forza controelettromotrice
da 0 a 1000
RW
+ 1000
06.08
Corrente di campo massima 1
da 0 a 1000
RW
+ 1000
06.09
Corrente di campo massima 2
da 0 a 1000
RW
+ 500
06.10
Corrente di campo minima
da 0 a 1000
RW
+ 500
06.11
Scalatura retroazione corrente di campo*
da 201 a 216
RW
+204
06.12
Timeout economia di campo
da 0 a 255
RW
030
06.13
Abilitazione controllo di campo
0o1
RW
0
06.14
Selettore campo massimo 2
0o1
RW
0
06.15
Abilitazione timeout economia di campo
0o1
RW
0
06.16
Guadagno integrale in anello di corrente di campo
0o1
RW
1
06.17
Guadagno integrale in anello di tensione
0o1
RW
0
06.18
Abilitazione regolazione guadagno di velocità
0o1
RW
0
06.19
Controllo diretto angolo d'innesco
0o1
RW
0
06.20
Selettore compens. caduta di tensione alternativa 2
06.21
Finecorsa anteriore angolo d'innesco
0o1
RW
0
da 0 a 1000
RW
+1000
06.22
06.23
Selettore controllo medio o totale**
0o1
RW
0
Ridurre i guadagni per il fattore 2
0o1
RW
0
06.24
Ridurre i guadagni per il fattore 4
0o1
RW
0
*
In base al numero di versione della scheda MDA3 (revisione)
**
Solo controllore di campo FXM5
Guida Mentor ll dell'utente
Versione numero: 13
37
www.controltechniques.com
8.5.8
Menu 07: Ingressi e uscite analogici
Numero
Descrizione
Campo
Tipo
Default
07.01
Ingresso per uso generale 1
±1000
RO
07.02
Ingresso per uso generale 2
±1000
RO
07.03
Ingresso per uso generale 3
±1000
RO
07.04
Ingresso per uso generale 4
±1000
RO
07.05
Ingresso riferimento di velocità
±1000
RO
07.06
Tensione efficace d'ingresso
da 0 a 1000
RO
07.07
Temperatura dissipatore di calore
da 0 a 1000
RO
07.08
Sorgente DAC 1
da 0 a 1999
RW
+ 201
07.09
Sorgente DAC 2
da 0 a 1999
RW
+ 302
07.10
Sorgente DAC 3
da 0 a 1999
RW
+ 304
07.11
Destinazione GP1
da 0 a 1999
RW
+ 318
07.12
Destinazione GP2
da 0 a 1999
RW
+ 408
07.13
Destinazione GP3
da 0 a 1999
RW
+ 119
07.14
Destinazione GP4
da 0 a 1999
RW
+ 120
07.15
Destinazione riferimento di velocità
da 0 a 1999
RW
+ 117
07.16
Scalatura GP1
da 0 a 1999
RW
+1000
07.17
Scalatura GP2
da 0 a 1999
RW
+1000
07.18
Scalatura GP3
da 0 a 1999
RW
+1000
07.19
Scalatura GP4
da 0 a 1999
RW
+1000
07.20
Scalatura riferimento di velocità
da 0 a 1999
RW
+1000
07.21
Scalatura DAC1
da 0 a 1999
RW
+1000
07.22
Scalatura DAC2
da 0 a 1999
RW
+1000
07.23
Scalatura DAC3
da 0 a 1999
RW
+1000
07.24
Scalatura encoder di riferimento
da 0 a 1999
RW
+419
07.25
Selettore riferimento encoder
0o1
RW
0
07.26
Selettore ingresso di corrente
0o1
RW
0
07.27
Selettore modo ingresso di corrente
0o1
RW
0
07.28
Selettore modo ingresso di corrente
0o1
RW
1
07.29
Inversione ingressi analogici GP3 e GP4
0o1
RW
0
38
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.9
Menu 08: Ingressi di logica
Numero
Descrizione
Campo
Tipo
Default
08.01
Ingresso F1 consenso marcia
0o1
RO
08.02
Ingresso F2 jog inverso
0o1
RO
08.03
Ingresso F3 jog avanti
0o1
RO
08.04
Ingresso F4 marcia inversa
0o1
RO
08.05
Ingresso F5 marcia avanti
0o1
RO
08.06
Ingresso F6
0o1
RO
08.07
Ingresso F7
0o1
RO
08.08
Ingresso F8
0o1
RO
08.09
Ingresso F9
0o1
RO
08.10
Ingresso F10
0o1
RO
08.11
Abilitazione ingresso
0o1
RO
08.12
Destinazione F2
da 0 a 1999
RW
+ 000
08.13
Destinazione F3
da 0 a 1999
RW
+ 000
08.14
Destinazione F4
da 0 a 1999
RW
+ 000
08.15
Destinazione F5
da 0 a 1999
RW
+ 000
08.16
Destinazione F6
da 0 a 1999
RW
+ 000
08.17
Destinazione F7
da 0 a 1999
RW
+ 000
08.18
Destinazione F8
da 0 a 1999
RW
+ 000
08.19
Destinazione F9
da 0 a 1999
RW
+ 000
08.20
Destinazione F10
da 0 a 1999
RW
+ 000
08.21
Disabilitazione funzioni logiche normali
0o1
RW
0
08.22
Inversione ingresso F2
0o1
RW
0
08.23
Inversione ingresso F3
0o1
RW
0
08.24
Inversione ingresso F4
0o1
RW
0
08.25
Inversione ingresso F5
0o1
RW
0
08.26
Inversione ingresso F6
0o1
RW
0
08.27
Inversione ingresso F7
0o1
RW
0
08.28
Inversione ingresso F8
0o1
RW
0
08.29
Inversione ingresso F9
0o1
RW
0
08.30
Inversione ingresso F10
0o1
RW
0
08.31
Abilitazione jog inverso
0o1
RW
0
08.32
Abilitazione jog avanti
0o1
RW
0
08.33
Abilitazione marcia inversa
0o1
RW
0
08.34
Abilitazione marcia avanti
0o1
RW
0
Guida Mentor ll dell'utente
Versione numero: 13
39
www.controltechniques.com
8.5.10
Numero
Menu 09: Uscite di stato
Descrizione
Campo
Tipo
Default
09.01
Uscita stato 1
0o1
RO
09.02
Uscita stato 2
0o1
RO
09.03
Uscita stato 3
0o1
RO
09.04
Uscita stato 4
0o1
RO
09.05
Uscita stato 5
0o1
RO
09.06
Uscita stato 6 (relè)
0o1
RO
09.07
Sorgente 1 stato 1
da 0 a 1999
RW
+ 111
09.08
Inversione sorgente 1 stato 1
0o1
RW
0
09.09
Sorgente 2 stato 1
da 0 a 1999
RW
000
09.10
Inversione sorgente 2 stato 1
0o1
RW
0
09.11
Inversione uscita stato 1
0o1
RW
0
09.12
Ritardo stato 1
da 0 a 255 sec
RW
00
09.13
Sorgente 1 stato 2
da 0 a 1999
RW
+ 1007
09.14
Inversione sorgente 1 stato 2
09.15
Sorgente 2 stato 2
09.16
09.17
0o1
RW
0
da 0 a 1999
RW
000
Inversione sorgente 2 stato 2
0o1
RW
0
Inversione uscita stato 2
0o1
RW
0
da 0 a 255 sec
RW
0
da 0 a 1999
RW
+1013
09.18
Ritardo stato 2
09.19
Sorgente stato 3
09.20
Inversione uscita stato 3
09.21
Sorgente stato 4
09.22
Inversione uscita stato 4
09.23
Sorgente stato 5
09.24
Inversione uscita stato 5
09.25
Sorgente stato 6 (relè)
09.26
Inversione uscita stato 6
0o1
RW
0
da 0 a 1999
RW
+1003
0o1
RW
0
da 0 a 1999
RW
+1006
0o1
RW
0
da 0 a 1999
RW
+1009
0o1
RW
0
40
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.11
Menu 10: Logica di stato e informazioni diagnostiche
Numero
Descrizione
Campo
Tipo
10.01
Velocità avanti
0o1
RO
10.02
Velocità inversa
0o1
RO
10.03
Limite di corrente
0o1
RO
10.04
Ponte 1 abilitato
0o1
RO
10.05
Ponte 2 abilitato
0o1
RO
10.06
Retrofasatura elettrica
0o1
RO
10.07
In velocità
0o1
RO
10.08
Velocità eccessiva
0o1
RO
10.09
Velocità zero
0o1
RO
10.10
Protezione attiva della tensione d'indotto
0o1
RO
10.11
Rotazione delle fasi
0o1
RO
10.12
Stato del convertitore (normale)
0o1
RO
10.13
Allarme (I x t)
0o1
RO
10.14
Perdita di campo
0o1
RO
10.15
Perdita di retroazione
0o1
RO
10.16
Perdita di alimentazione o di fase
0o1
RO
10.17
Allarme istantaneo
0o1
RO
10.18
Sovraccarico prolungato
0o1
RO
10.19
Sistema di sorveglianza processore 1
0o1
RO
10.20
Sistema di sorveglianza processore 2
0o1
RO
10.21
Sovratemperatura motore
0o1
RO
10.22
Sovratemperatura dissipatore di calore
0o1
RO
10.23
Anello di velocità saturo
0o1
RO
10.24
Richiesta di corrente a zero
10.25
Ultimo allarme
10.26
10.27
Default
0o1
RO
da 0 a 255
RO
Penultimo allarme (10.25)
da 0 a 255
RO
Allarme precedente 10.26
da 0 a 255
RO
10.28
Allarme precedente 10.27
da 0 a 255
RO
10.29
Disabilitazione allarme per perdita di campo
0o1
RW
0
10.30
Disabilitazione allarme per perdita della retroazione
0o1
RW
0
10.31
Disabilitazione allarme per perdita di alim. o fase
0o1
RW
0
10.32
Disabilitazione allarme per sovratemperatura motore
0o1
RW
1
10.33
Disabilitazione allarme per sovratemperatura dissipatore
0o1
RW
0
10.34
Allarme esterno
10.35
Allarme processore 2
10.36
10.37
0o1
RW
0
da 0 a 255
RW
0
Disabilitazione allarme per perdita anello di corrente
0o1
RW
0
Disabilitazione allarme per circuito interrotto indotto
0o1
RW
0
Guida Mentor ll dell'utente
Versione numero: 13
41
www.controltechniques.com
8.5.12
NOTA
Menu 11: Varie
N
I parametri da 11.07 a 11.10 hanno funzioni associate alla scheda di circuiti stampati MD29. Vedere la guida MD29 dell'utente.
Numero
Descrizione
Campo
Tipo
Default
11.01
Parametro 00.01
da 0 a 1999
RW
0
11.02
Parametro 00.02
da 0 a 1999
RW
0
11.03
Parametro 00.03
da 0 a 1999
RW
0
11.04
Parametro 00.04
da 0 a 1999
RW
0
11.05
Parametro 00.05
da 0 a 1999
RW
0
11.06
Parametro 00.06
da 0 a 1999
RW
0
11.07
Parametro 00.07
da 0 a 1999
RW
0
11.08
Parametro 00.08
da 0 a 1999
RW
0
11.09
Parametro 00.09
da 0 a 1999
RW
0
11.10
Parametro 00.10
da 0 a 1999
RW
0
da 0 a 99
RW
001
0o1
RW
0
da 1 a 4
RW
001
11.11
Indirizzo seriale
11.12
Velocità di trasm. in baud
11.13
Modo seriale
11.14
Riservato
11.15
Versione software processore 1
da 0 a 1000
RO
11.16
Versione software processore 2
da 0 a 1000
RO
11.17
Codice di sicurezza livello 3
da 0 a 255
RW
149
11.18
Parametro di avviamento
da 0 a 1999
RW
+ 000
11.19
Sorgente seriale programmabile
da 0 a 1999
RW
+ 000
11.20
Scalatura seriale
da 0 a 1999
RW
+1000
11.21
Byte dei LED
da 0 a 255
RW
11.22
Disabilitazione funzioni normali a LED
0o1
RW
0
11.23
MDA6 alta tensione
0o1
RW
0
11.24
Arresto e ripartenza alla mancanza rete (alim. in c.a.)
0o1
RW
0
Campo
Tipo
Default
8.5.13
Numero
Menu 12: Soglie programmabili
Descrizione
12.01
Soglia 1 superata
0o1
RO
12.02
Soglia 2 superata
0o1
RO
12.03
Sorgente soglia 1
da 0 a 1999
RW
+ 302
12.04
Livello soglia 1
da 0 a 1000
RW
+ 000
12.05
Isteresi soglia 1
da 0 a 255
RW
002
12.06
Inversione uscita della soglia 1
0o1
RW
0
12.07
Destinazione soglia 1
da 0 a 1999
RW
+ 000
12.08
Sorgente soglia 2
da 0 a 1999
RW
+ 501
12.09
Livello soglia 2
da 0 a 1000
RW
+ 000
12.10
Isteresi soglia 2
da 0 a 255
RW
002
0o1
RW
0
da 0 a 1999
RW
+ 000
12.11
Inversione uscita della soglia 2
12.12
Destinazione soglia 2
42
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.14
Numero
Menu 13: Albero elettrico
Descrizione
Campo
Tipo
Default
13.01
Contagiri encoder del master
da 0 a 1023
RO
13.02
Contagiri encoder dello slave
da 0 a 1023
RO
13.03
Incremento contagiri del master
±1000
RO
13.04
Incremento contagiri dello slave
±1000
RO
13.05
Errore di posizione
13.06
Riferimento di precisione (lsb)
13.07
Riferimento di precisione (msb)
da 0 a 255
RW
000
13.08
Guadagno in anello di posizione
da 0 a 255
RW
025
13.09
Limite di correzione anello di posizione
da 0 a 1000
RW
+ 010
13.10
Abilitazione albero elettrico
0o1
RW
0
13.11
Selettore albero elettrico rigido
0o1
RW
1
±1000
RO
da 0 a 255
RW
000
13.12
Selettore riferimento di precisione
0o1
RW
0
13.13
Autotenuta riferimento di precisione
0o1
RW
1
13.14
Riferimento di precisione di velocità (a 16 bit)
da 000 a 65535
RW
0
Default
8.5.15
Menu 14 Impostazione del sistema plus MD29
Per ulteriori informazioni sui parametri del Menu 14, vedere la Guida MD29 dell'utente.
Numero
Descrizione
Campo
Tipo
14.01
Indirizzo seriale ANSI
da 0 a 99
RW
1
14.02
Modo RS485
da 1 a 16
RW
1
14.03
Velocità di trasm. in baud RS485
da 3 a 192
RW
48
14.04
Base dei tempi del task CLOCK (ms)
da 1 a 200
RW
10
14.05
Indirizzo del nodo CTNet (solo MD29AN)
da 0 a 255
RW
0
14.06
Abilitazione marcia automatica
0o1
RW
1
14.07
Abilitazione allarme globale in fase di esecuzione
0o1
RW
1
14.08
Abilitazione allarme del collegamento I/O
0o1
RW
0
14.09
Abilitazione sistema di sorveglianza (WDOG)
0o1
RW
0
14.10
Allarme per superamento campo di scrittura di un parametro
0o1
RW
1
0
14.11
Disabilitazione protocollo porta di monitoraggio
0o1
RW
14.12
Abilitazione controller di posizione
0o1
RW
0
14.13
Sorgente di sincronizzazione collegamento I/O
0o1
RW
0
14.14
Selezione base dei tempi encoder
0o1
RW
0
14.15
Riservato
0o1
RW
0
14.16
Richiesta salvataggio in memoria flash
0o1
RW
0
14.17
Abilitazione comunic. RS232 da convertitore a convertitore
11.09
Puntatore parametro RS485
11.10
Puntatore parametro RS485 n. 2 (modo 4)
da 0 a 1999
RW
0
11.10
Scalatura modo RS485 3
da 0 a 1999
RW
0
16.62
Messaggi CT Net per secondo
da 0 a 1999
RO
16.63
Numero di righe di errore
da 0 a 1999
RO
Guida Mentor ll dell'utente
Versione numero: 13
0o1
RW
0
da 0 a 1999
RW
0
43
www.controltechniques.com
8.5.16
Menu 15: Menu delle applicazioni 1
Numero
Descrizione
Campo
Tipo
Default
15.01
Variabile RO 1
±1999
RO
15.02
Variabile RO 2
±1999
RO
15.03
Variabile RO 3
±1999
RO
15.04
Variabile RO 4
±1999
RO
15.05
Variabile RO 5
±1999
RO
15.06
Variabile RW reale 1
±1999
RW
+ 000
15.07
Variabile RW reale 2
±1999
RW
+ 000
15.08
Variabile RW reale 3
±1999
RW
+ 000
15.09
Variabile RW reale 4
±1999
RW
+ 000
15.10
Variabile RW reale 5
±1999
RW
+ 000
15.11
Variabile RW intera 1
da 0 a 255
RW
000
15.12
Variabile RW intera 2
da 0 a 255
RW
000
15.13
Variabile RW intera 3
da 0 a 255
RW
000
15.14
Variabile RW intera 4
da 0 a 255
RW
000
15.15
Variabile RW intera 5
da 0 a 255
RW
000
15.16
Variabile RW intera 6
da 0 a 255
RW
000
15.17
Variabile RW intera 7
da 0 a 255
RW
000
15.18
Variabile RW intera 8
da 0 a 255
RW
000
15.19
Variabile RW intera 9
da 0 a 255
RW
000
15.20
Variabile RW intera 10
da 0 a 255
RW
000
15.21
Variabile bit 1
0o1
RW
0
15.22
Variabile bit 2
0o1
RW
0
15.23
Variabile bit 3
0o1
RW
0
15.24
Variabile bit 4
0o1
RW
0
15.25
Variabile bit 5
0o1
RW
0
15.26
Variabile bit 6
0o1
RW
0
15.27
Variabile bit 7
0o1
RW
0
15.28
Variabile bit 8
0o1
RW
0
15.29
Variabile bit 9
0o1
RW
0
15.30
Variabile bit 10
0o1
RW
0
15.31
Variabile bit 11
0o1
RW
0
15.32
Variabile bit 12
0o1
RW
0
15.33
Variabile bit 13
0o1
RW
0
15.34
Variabile bit 14
0o1
RW
0
15.35
Variabile bit 15
0o1
RW
0
15.36
Variabile bit 16
0o1
RW
0
RW reale (non salvato in NVRAM)
da 0 a 1999
RW
0
15.60
Valore intero esteso rapporto 1 = 15.16 e 15.17
da 0 a 65535
RW
000
15.61
Valore intero esteso rapporto 2 = 15.18 e 15.19
da 0 a 65535
RW
000
15.62
Dati d'ingresso modo seriale 4
da 0 a 65535
RO
15.63
Dati d'uscita modo seriale 4
da 0 a 65535
RO
da 15.37
a
15.59
44
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.5.17
Menu 16: Menu delle applicazioni 2
Numero
Descrizione
Campo
Tipo
Default
16.01
Variabile RO 1
±1999
RO
16.02
Variabile RO 2
±1999
RO
16.03
Variabile RO 3
±1999
RO
16.04
Variabile RO 4
±1999
RO
16.05
Variabile RO 5
±1999
RO
16.06
Variabile RW reale 1
±1999
RW
+ 000
16.07
Variabile RW reale 2
±1999
RW
+ 000
16.08
Variabile RW reale 3
±1999
RW
+ 000
16.09
Variabile RW reale 4
±1999
RW
+ 000
16.10
Variabile RW reale 5
±1999
RW
+ 000
16.11
Variabile RW intera 1
da 0 a 255
RW
000
16.12
Variabile RW intera 2
da 0 a 255
RW
000
16.13
Variabile RW intera 3
da 0 a 255
RW
000
16.14
Variabile RW intera 4
da 0 a 255
RW
000
16.15
Variabile RW intera 5
da 0 a 255
RW
000
16.16
Variabile RW intera 6
da 0 a 255
RW
000
16.17
Variabile RW intera 7
da 0 a 255
RW
000
16.18
Variabile RW intera 8
da 0 a 255
RW
000
16.19
Variabile RW intera 9
da 0 a 255
RW
000
16.20
Variabile RW intera 10
da 0 a 255
RW
000
16.21
Variabile bit 1
0o1
RW
0
16.22
Variabile bit 2
0o1
RW
0
16.23
Variabile bit 3
0o1
RW
0
16.24
Variabile bit 4
0o1
RW
0
16.25
Variabile bit 5
0o1
RW
0
16.26
Variabile bit 6
0o1
RW
0
16.27
Variabile bit 7
0o1
RW
0
16.28
Variabile bit 8
0o1
RW
0
16.29
Variabile bit 9
0o1
RW
0
16.30
Variabile bit 10
0o1
RW
0
16.31
Variabile bit 11
0o1
RW
0
16.32
Variabile bit 12
0o1
RW
0
16.33
Variabile bit 13
0o1
RW
0
16.34
Variabile bit 14
0o1
RW
0
16.35
Variabile bit 15
0o1
RW
0
16.36
Variabile bit 16
0o1
RW
0
RW reale (non salvato in NVRAM)
da 0 a 1999
RW
0
16.62
Messaggi CT Net
da 0 a 1999
RO
16.63
Numero di righe DPL in errore
da 0 a 1999
RO
da 16.37
a
16.61
Guida Mentor ll dell'utente
Versione numero: 13
45
www.controltechniques.com
8.6
Descrizioni dei parametri avanzati
8.6.1
Menu 1: Riferimento di velocità
Il convertitore dispone di quattro riferimenti di velocità, 01.17, 01.18,
01.19 e 01.20, ciascuno dei quali può ricevere un valore singolo
qualsiasi, compreso nel campo fino a 1000 in marcia sia avanti sia
inversa (il valore 1000 rappresenta la massima velocità), ed essere
riscritto mediante il tastierino, gli ingressi programmabili o il
collegamento seriale (interfaccia) in qualsiasi momento. La destinazione
di default per il riferimento di velocità esterno (terminale TB1-3) è il
riferimento 1 (01.17), cioè il riferimento esterno è presente nel
riferimento 1, salvo che venga selezionato uno degli altri tre riferimenti.
La disponibilità di quattro parametri per il riferimento di velocità
selezionabile assicura una grande flessibilità nell'uso di detti riferimenti
da altre apparecchiature. Tali riferimenti esterni supplementari sarebbero
gestiti da ingressi analogici per uso generale, nel Menu 07, oppure da
ingressi digitali logici, nel Menu 08.
Due selettori, 01.14 e 01.15, sono destinati al controllo dell'applicazione
dei quattro riferimenti interni come riferimento sorgente di velocità.
I fattori di modifica applicati al riferimento sorgente di velocità sono, in
sequenza, un offset supplementare, la selezione di un ingresso bipolare
o unipolare, l'inversione della polarità (funzionamento inverso) e i valori
massimo e minimo della velocità avanti e inversa, nel Menu 02.
Selettori di controllo:
01.11 Riferimento ATTIVATO (se 01.11 = 0 quindi il riferimento
pre-rampa = 0),
01.12 Funzionamento inverso (mediante l'inversione del riferimento)
01.13 Riferimento velocità di jog (01.05).
Il riferimento di velocità alla sorgente, 01.01 è l'ingresso inviato
all'interblocco del riferimento zero 01.16, che ha il compito (quando è
selezionato, 01.16 = 1) di impedire l'avviamento del convertitore finché il
riferimento di velocità non è vicino a zero.
01.01
Ú
±1000
01.05
Bi
RW
Ú
Riferimento di velocità post-offset
RO
±1000
Bi
Ö
01.06
±1000
Velocità max. avanti
RW
Ú
da 0 a +1000
01.07
RW
Ú
da 0 a +1000
Uni
Ö
01.08
+000
Velocità min. inversa
RW
da -1000 a 0
Uni
Ö
01.09
+000
Velocità max. inversa
RW
Bi
Ú
Ö
da -1000 a 0
Uni
Ö
-1000
A 1 quadrante
Offset
RW
0
Ö
Uni
000
Imposta il limite massimo di velocità in rotazione inversa.
RW
±1000
+1000
Velocità minima avanti
Ú
Ú
Ö
Imposta il limite massimo di velocità in rotazione avanti.
Riferimento di velocità finale prima che sia applicato qualsiasi tempo di
rampa (vedere il Menu 02).
01.04
Uni
A 4 quadranti
Riferimento pre-rampa
RO
Ú
+050
Imposta il limite minimo di velocità in rotazione inversa. Il valore minimo
di velocità viene disabilitato se il selettore bipolare 01.10 =1 al fine di
impedire l'oscillazione fra le velocità minime avanti e inversa quando il
riferimento di velocità in ingresso è zero.
Controlla il valore del riferimento di velocità dopo che è stato aggiunto
l'offset 01.04.
01.03
Ö
Diventa la sorgente del riferimento di velocità quando è selezionato da
01.13 (controllato di default dai terminali TB3-22 e TB3-23). Fornisce la
comoda funzione di impostare una richiesta di velocità diversa
(e solitamente minore) dal normale riferimento di velocità. Il suo valore
deve essere minore della velocità massima impostata da 01.06 e da 01.09.
Ú
Ú
±1000
Bi
Ö
Controlla continuamente il valore del riferimento di velocità. Il parametro
01.01 viene inoltre impiegato per attivare l'interblocco del riferimento di
velocità zero, 01.16.
01.02
Riferimento di jog
Imposta il limite minimo di velocità in rotazione avanti. Il valore minimo di
velocità viene disabilitato se il selettore bipolare 01.10 =1 al fine di
impedire l'oscillazione fra le velocità minime avanti e inversa quando il
riferimento di velocità in ingresso è zero.
Riferimento di velocità pre-offset
RO
L'offset del riferimento analogico (campo da -1000 a +1000) è un
termine programmabile di richiesta velocità aggiunto al valore di
riferimento velocità 01.01. È un ingresso pratico di compensazione della
velocità, come per esempio quello ricevuto da un rullo ballerino per il
controllo della tensione, oppure può servire per impostare una velocità
minima o micrometrica.
Ö
Bi
+000
46
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
01.10
Selettore riferimento bipolare
01.14
Selettore riferimento 1
RW
A 4 quadranti
RW
Ú
Bit
Ö
Ú
1
Ú
Bit
Ö
0
Quando è impostato su 1, consente al convertitore di rispondere a un
riferimento analogico bipolare di velocità (01.02), nel qual caso la
direzione di rotazione viene determinata dal segnale bipolare. La polarità
positiva determina la rotazione
avanti; quella negativa la rotazione inversa. Quando 01.10 = 0,
il convertitore risponde in un modo unipolare, in quanto i segnali di
polarità negativa vengono considerati come richiesta di velocità zero.
Ö
1.14
1.15
Riferimento selezionato
0
0
1.17
1
0
1.18
0
1
1.19
1
1
1.20
01.15
Selettore riferimento 2
RW
Ú
01.11
Riferimento ‘ATTIVATO’
RW
Ú
Ö
Bit
Selettore inversione
RW
Ú
Ö
Bit
0, inversione non
selezionata
La selezione del funzionamento inverso inverte la polarità del segnale di
riferimento velocità. Ha l'effetto (in un convertitore a quattro quadranti)
di invertire il senso del segnale di velocità indipendentemente dalla
direzione nominale della rotazione del motore. Il valore di default è 01.12
= 0, senza applicazione dell'inversione. Controllato di default dai
terminali TB3-22, TB3-23, TB3-24, e TB3-25.
Ö
Selettore jog
01.16
Interblocco riferimento zero
RW
Ú
Ö
Ú
Ö
Bit
0, jog non selezionato
La selezione del jog sostituisce tutti gli altri riferimenti di richiesta
velocità con il riferimento di jog 01.05. Il valore di default è 01.13 = 0,
con il riferimento normale di velocità applicato. Controllato di default dai
terminali TB3-22, TB3-23.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
Bit
0, inibizione non
applicata
Impedisce l'avviamento del convertitore finché il riferimento analogico di
velocità, esterno o interno, non è vicino a zero:
-8 < 01.01 < +8 (valori in 0,1% della piena velocità)
Questa funzione risulta comoda in applicazioni in cui, per motivi di
sicurezza o di processo, l'operatore determina la velocità mediante
l'osservazione del processo, per esempio l'estrusione, o dei convertitori
di trazione.
01.17
Riferimento 1
01.18
Riferimento 2
01.19
Riferimento 3
01.20
Riferimento 4
Ú
RW
0
I due selettori del riferimento 01.14 e 01.15 in combinazione consentono
la selezione di uno dei quattro riferimenti interni di velocità da 01.17 a
01.20. Vedere la tabella riportata sopra.
RW
01.13
Bit
0, no riferim. velocità
Applica il riferimento di velocità a 01.03, il riferimento pre-rampa.
Per default è impostato a zero se il terminale TB3-21 (Consenso marcia)
è disattivato. Non può essere impostato a 1 salvo che il terminale
TB3-21 sia attivato. È inoltre vincolato allo stato delle normali funzioni
logiche, vedere il Menu 08. È controllato di default dai terminali TB3-22,
TB3-23, TB3-24, TB3-25.
Quando le normali funzioni logiche sono disabilitate, si può utilizzare un
ingresso programmabile per controllare il parametro 01.11 solo se è
presente un segnale di CONSENSO MARCIA.
01.12
0
I due selettori del riferimento 01.14 e 01.15 in combinazione consentono
la selezione di uno dei quattro riferimenti di velocità da 01.17 a 01.20.
A 1 quadrante
RW
Bit
Ö
Bi
Come indicato sotto
Riferimento 1, il parametro 01.17 è la destinazione di default del
riferimento di velocità esterno (terminale TB1-3) attraverso l'ingresso
programmabile 07.15.
Riferimento 2, parametro 01.18, default +300.
Riferimenti 3 e 4, parametri 01.19 e 01.20, assumono per default il
valore rispettivamente degli ingressi programmabili GP3 (TB1-6) e GP4
(TB1-7).
47
8.6.2
Menu 02: Rampe
Le alternative principali disponibili per l'impostazione delle rampe sono
le seguenti:
1. Nessuna rampa, bypassando le funzioni delle rampe.
2. Una selezione di rampe in funzionamento avanti e inverso per le
normali condizioni di marcia e una rampa opzionale separata per il jog.
La configurazione di selezione delle rampe di marcia consente la
massima flessibilità. Per ogni modo di funzionamento, si possono
scegliere due valori di rampa, per esempio accelerazioni avanti 1 e 2,
decelerazioni avanti 1 e 2 e così via. Un selettore di rampa comune
consente la commutazione fra i due gruppi (tutti i valori 1 o tutti i 2).
Inoltre, si possono cambiare le rampe 1 e 2 di qualsiasi quadrante
nell'ambito della selezione comune. I selettori di rampa possono essere
controllati da qualsiasi ingresso digitale programmabile.
Per attivare la rampa di jog, è richiesto un segnale di selezione da 01.13
oltre alla funzione di abilitazione 02.13.
Il funzionamento della rampa può essere interrotto dal parametro di
mantenimento rampa, che mantiene l'uscita della rampa al valore attuale
quando è impostato su 1. La disabilitazione della rampa esclude questa
funzione.
Il valore del segnale del riferimento di velocità dopo la rampa viene
monitorato dal riferimento post-rampa.
02.01
Riferimento post-rampa
R0
Ú
±1000
Ú
Bit
Ö
Decelerazione inversa 2
02.11
Accelerazione inversa 2
RW
Ú
da 0 a 1999
abilitato
Ú
02.12
0
Quando è impostato su 1, mantiene l'uscita di rampa al valore attuale.
Utilizzando un ingresso programmabile per controllare questo
parametro, la velocità del convertitore può essere regolata agendo sui
pulsanti 'increase' (aumenta) e 'decrease' (diminuisci) invece che con un
potenziometro o con un'altra sorgente di riferimento continuamente
variabile. La disabilitazione della rampa esclude questa funzione.
RW
Ú
da 0 a 1999
Accelerazione avanti 1
02.05
Decelerazione avanti 1
02.06
Decelrazione inversa 1
02.07
Accelerazione inversa 1
da 0 a 1999
Ö
0,1s
Uni
Ö
+100 = 10 s
0,1s
Definisce il tempo di accelerazione e di decelerazione quando è
selezionato il Riferimento di jog (01.13 =1).
Per selezionare, 02.13 =1.
Abilitazione rampa per jog
0o1
Bit
Ö
0, disabilitato
Seleziona un tempo di rampa dedicato (definito da 02.12) quando si
utilizza il jog. Se non è selezionato, le rampe normali da 02.04 a 02.11
vengono impiegate per il jog e per la marcia.
02.14
Selettore accelerazione avanti
02.15
Selettore decelerazione avanti
02.16
Selettore decelerazione inversa
02.17
Selettore accelerazione inversa
0o1
Bit
Ö
0, Rampa 1
Selezionare dal Gruppo 1 o 2
Questi selettori consentono all'utente di selezionare le rampe da uno dei
due gruppi e quindi di cambiare i singoli tempi di accelerazione e/o di
decelerazione al ricevimento di un comando appropriato.
02.18
Selettore rampa comune
RW
02.04
+100 = 10 s
Tempo di rampa per jog
Ú
Ö
RW
Ö
RW
Bit
Uni
Tempi di rampa alternativi per l'accelerazione e la decelerazione.
Mantenimento della rampa
RW
Ú
02.10
Ú
Se viene impostato su disabilitazione, rende il riferimento di velocità
post-rampa 02.01 pari al riferimento di velocità pre-rampa 01.03,
in quanto esclude le funzioni di rampa.
02.03
Decelerazione avanti 2
RW
Abilitazione rampa
1
02.09
Bi
Ö
RW
Accelerazione avanti 2
02.13
Controlla il valore del riferimento di velocità dopo che è stato bypassato
o modificato dalla rampa selezionata.
02.02
02.08
Ú
0o1
Bit
Ö
0, Gruppo 1
Abilita la selezione fra tutte le rampe del Gruppo 1 se da 02.14 a 02.17 = 0,
oppure tutte quelle del Gruppo 2.
02.19
Scalatura rampe (x10)
RW
Uni
+050 = 5 s
0,1s
Definisce il tempo che occorre per accelerare da fermo alla velocità
massima a fondo scala (01.03 = 1000), oppure per decelerare da tale
velocità a motore fermo, come più opportuno.
Ú
0o1
Ö
Bit
0, disabilitato
Quando 02.19 = 1, il tempo delle rampe di accelerazione e di
decelerazione viene moltiplicato per 10.
48
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.3
Menu 03: Selezione della retroazione e anello
di velocità
Gli ingressi principali sono il riferimento post-rampa 02.01 e il riferimento
di velocità reale 03.18. Il riferimento post-rampa può essere sommato o
sostituito dal riferimento di velocità reale. In alternativa, il riferimento di
velocità può essere il solo riferimento di velocità reale. L'ingresso
selezionato può essere modificato dall'aggiunta di un offset. Il risultato di
questa sommatoria è la richiesta di velocità finale (03.01), che viene
aggiunta algebricamente alla retroazione della velocità per diventare
l'errore di velocità (03.06). L'errore di velocità viene infine elaborato dalla
funzione PID per diventare l'uscita dell'anello di velocità.
La retroazione della velocità viene derivata da una delle tre sorgenti
possibili, l'encoder (tachimetro a impulsi), il generatore tachimetrico
(tachimetro) o la tensione d'indotto. La sorgente selezionata diventa la
retroazione della velocità (03.02). Qualora si selezioni la tensione
d'indotto, essa viene dapprima sommata alla compensazione della
caduta di tensione (03.05), derivata dalla funzione integrale dell'errore di
velocità, poi il fattore di compensazione della caduta di tensione viene
aggiunto o sottratto dalla retroazione scalata della tensione d'indotto a
seconda che si sia selezionata la compensazione della caduta di
tensione o l'abbassamento della tensione.
La retroazione della tensione d'indotto viene passata a un comparatore
per fornire una protezione della tensione, utilizzata internamente per
impedire la sovratensione dell'indotto. Il parametro 03.15 diventa il livello
di protezione.
Il valore della retroazione della velocità viene utilizzato per altri due
scopi, ovvero fornire un'indicazione della velocità in giri/min e indicare la
velocità zero.
03.01
Ú
±1000
Ö
Ú
±1000
Bi
Ú
Bi
Ö
Bi
Ö
±1000
Risultato del valore selezionato della compensazione caduta di tensione
03.17 che agisce sull'uscita integrale dell'anello di velocità.
03.06
Errore di velocità
RO
Ú
Bi
Ö
±1000
Risultato, dopo il filtraggio, della sommatoria della richiesta di velocità
finale e della retroazione della velocità.
03.07
Uscita anello di velocità
RO
Bi
Ö
±1000
Integrale errore di velocità
RO
Ú
Bi
Ö
±1000
Valore integrato dell'errore di velocità 03.06, utilizzato come ingresso per
il calcolo della compensazione della caduta di tensione quando si
utilizza la retroazione della tensione d'indotto (AVF).
Guadagno proporzionale in anello di velocità
RW
Retroazione della velocità (giri/min.)
±1999
Ú
V
Uscita di compensazione caduta di tensione
Ö
RO
Ö
±1000
RO
03.09
Controlla il valore della retroazione della velocità, derivato da una delle
tre sorgenti seguenti: encoder (tach. a impulsi), generatore tachimetrico
(tachimetro) o tensione d'indotto. La selezione viene controllata da 03.12
e 03.13. Il valore è impiegato per il controllo della velocità in anello
chiuso del motore. La scalatura del segnale dell'encoder (tachimetro a
impulsi) viene impostata da 03.14 e quella della retroazione della
tensione d'indotto è controllata dalla impostazione della tensione
massima d'indotto 03.15. Per la scalatura del segnale di retroazione del
generatore tachimetrico (tachimetro) è fornito un potenziometro.
La retroazione della velocità 03.02 è sommata alla richiesta di velocità
finale 03.01 nel punto di sommatoria dell'anello di velocità.
03.03
03.05
03.08
Retroazione della velocità
RO
Ú
Bi
Uscita dell'anello di velocità PID che diventa la richiesta di corrente
(menu 04).
Bi
Controlla il valore del riferimento di velocità dopo che questo è stato
bypassato o modificato dalle rampe e/o dal riferimento di velocità reale
(03.18) e dall'offset fine di velocità (03.22). È il riferimento di velocità che
viene presentato all'anello di controllo velocità del convertitore
attraverso il punto di sommatoria della velocità.
03.02
Tensione d'indotto
RO
Ú
Richiesta di velocità finale
RO
03.04
Ú
da 0 a 255
Ö
Uni
080
Il fattore per il quale viene moltiplicato l'errore di velocità per produrre il
termine di correzione.
Valore di 03.09
Fattore = -----------------------------------------8
Se si incrementa questo valore, si aumenta sia lo smorzamento del
sistema, sia la risposta della velocità ai transitori e se lo si aumenta
eccessivamente per un dato carico, il sistema diventa instabile.
L'impostazione ottimale è il valore più alto possibile prima che si produca
instabilità. Le prestazioni ottimali dell'anello di velocità si ottengono dalla
combinazione saggia di tutti i tre guadagni dell'algoritmo PID.
Per aumentare il guadagno proporzionale in anello di velocità per il
fattore 4, vedere 03.28.
giri/min
Valore scalato della retroazione della velocità del motore per
informazioni esterne.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
49
03.10
Guadagno integrale in anello di velocità
RW
Ú
da 0 a 255
03.14
Scalatura della retroazione encoder
Uni
Ö
RW
Ú
040
Il fattore per il quale viene moltiplicato l'errore di velocità per produrre il
termine di correzione.
6f × ( 03.10 )
Fattore = ------------------------------256
da 0 a 1999
Ö
Il valore deve essere impostato in modo da corrispondere alla velocità
massima del motore e al numero di fronti per giro dell'encoder
(tachimetro a impulsi). Per calcolare il fattore di scala:
750 × 10
Fattore di scala = ------------------------N×n
dove:
N = PPR (impulsi/giro) dell'encoder (tachimetro a impulsi)
n = velocità max del motore in giri/min.
Il valore di default viene determinato sulla base di un encoder a 1024
fronti (tachimetro a impulsi) e di una velocità massima di 1750 giri/min.
La frequenza massima dell'encoder è di 105 kHz.
03.15
Tensione massima d'indotto
RW
Guadagno derivativo in anello di velocità
RW
Ú
da 0 a 255
Uni
Ö
0
Fattore per il quale viene moltiplicato l'errore di velocità per produrre il
termine di correzione. Vi sono tre sorgenti possibili di ingresso per
questo termine, ovvero la richiesta di velocità finale 03.01, la retroazione
della velocità 03.02 o l'errore di velocità 03.06. Il selettore è 03.24.
Il termine derivativo è funzione del tempo di variazione del valore
dell'ingresso.
Nel caso in cui l'ingresso sia l'errore di velocità 03.06, l'uscita è negativa
se l'errore di velocità aumenta. Questo ha un effetto di smorzamento.
Se l'ingresso è la richiesta di velocità finale 03.01, l'uscita è positiva
quando detta richiesta aumenta. Questo viene chiamato feed-forward di
velocità.
Se l'ingresso è la retroazione della velocità 03.02, l'uscita è negativa se
detta retroazione aumenta. Questo ha inoltre un effetto di smorzamento,
ma dipende unicamente dalla variazione del valore della retroazione
della velocità, non dal riferimento di velocità.
03.12
Selettore retroazione digitale
RW
Ú
0o1
Bit
Ö 0 (retroazione analogica)
Selettore tensione d'indotto / retroazione
analogica esterna
RW
Ú
0o1
Ú
Bit
03.16
Determina il tipo di retroazione analogica della velocità quando 03.12
è impostato a 0. Impostare a 1 per selezionare la retroazione della
tensione d'indotto. L'impostazione di default seleziona la retroazione
analogica da un generatore tachimetrico (tachimetro) o da una sorgente
esterna equivalente collegata al terminale TB1-09.
Ö
+600
V
Velocità massima (scalatura giri/min)
RW
da 0 a 1999
Uni
Ö
+1750
giri/
min
Utilizzato unicamente per scalare la retroazione della velocità affinché il
valore visualizzato in 03.03 sia la velocità effettiva in giri/min. Il valore
applicato a 03.16 deve essere la velocità massima in giri/min. (divisa per
dieci se la velocità massima è >1999 giri/min; la velocità visualizzata in
03.03 è quindi in giri/min. 10.)
03.17
Compensazione caduta di tensione
RW
Ú
Ö 0 (retroazione analogica)
da 0 a 1000
Uni
Definisce la tensione massima applicabile all'indotto. Quando la
tensione d'indotto è la retroazione selezionata (03.12 = 0 e 03.13 = 1),
il valore della tensione massima d'indotto viene utilizzato per scalare la
misura della tensione d'indotto in modo che la retroazione della velocità
sia a fondo scala alla tensione massima.
Se la retroazione della velocità viene derivata da un encoder (tachimetro
a impulsi) o da un generatore tachimetrico (tachimetro), la tensione
d'indotto è controllata continuamente e la protezione viene applicata
quando la tensione supera il valore impostato in 03.15. Questo
parametro può essere utilizzato per impedire che la tensione salga oltre
il livello impostato.
Un fattore di scalatura automatica di 1,2 viene applicato per proteggere
la retroazione della tensione d'indotto fino al 20% oltre il valore
massimo, in modo da consentire la sovraelongazione.
Ú
Impostare a 1 per selezionare la retroazione dell'encoder (tachimetro a
impulsi). Impostare a 0 per selezionare la retroazione analogica.
03.13
+419
6
dove f = frequenza di alimentazione
Questo termine assicura l'errore di velocità zero durante condizioni di
carico in regime stazionario e l'aumento del suo valore determina
l'incremento del tempo di recupero dopo un disturbo. Se il termine viene
reso eccessivamente alto, la velocità tende a oscillare piuttosto che
stabilizzarsi rapidamente. L'impostazione ottimale è il valore più elevato
possibile prima che si produca l'oscillazione. Le prestazioni ottimali
dell'anello di velocità si ottengono dalla combinazione saggia di tutti i tre
guadagni dell'algoritmo PID.
Il termine integrale viene protetto se si seleziona il modo di coppia,
oppure se il convertitore è in limite di corrente.
03.11
Uni
da 0 a 255
Ö
Uni
000
( 03.08 ) × ( 03.17 )
Valore di 03.05 = ---------------------------------------------2048
Questo valore viene utilizzato per calcolare la compensazione per la
caduta di tensione resistiva dell'indotto al fine di migliorare il controllo
della velocità con carichi variabili quando la retroazione della velocità
selezionata è la tensione d'indotto.
La compensazione della caduta di tensione è una retroazione positiva e
può provocare instabilità se impostata a un valore eccessivamente alto.
Inoltre, i motori moderni con telaio laminato presentano generalmente
una caratteristica crescente carico-velocità che non si adatta alla
retroazione della tensione d'indotto con compensazione della caduta di
50
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
tensione. La compensazione della caduta di tensione si adatta meglio ai
motori a eccitazione composta con una caratteristica piatta (non
crescente) carico-velocità.
L'integrale dell'errore di velocità è utilizzato come ingresso per la
compensazione della caduta di tensione piuttosto che come retroazione
della corrente perché è la più regolare delle variabili; in controllo della
velocità, il valore dell'integrale dell'errore di velocità è il valore in stato
stazionario della richiesta di corrente.
03.18
Riferimento di velocità reale
RW
Ú
±1000
Bi
Ö
(07.11)
Riferimento di velocità alimentato nell'anello di velocità senza passaggio
attraverso le rampe.
03.19
0o1
Ú
0o1
Bit
Ö
0
Se 03.20 = 1 quando si utilizza la tensione d'indotto come retroazione
della velocità, la velocità diminuirà all'aumentare del carico.
Un'applicazione tipica, per esempio, è una pressa meccanica di
tranciatura dotata di un volano pesante. L'applicazione
dell'abbassamento di tensione impedisce al convertitore di fornire un
brusco aumento di corrente al momento dell'impatto (brusco aumento
della richiesta di coppia). È preferibile che il convertitore eroghi energia
al volano nel corso dell'intero ciclo di funzionamento piuttosto che
concentrarla prevalentemente al momento dell'impatto.
03.21
Ú
0o1
Ö
Ú
da 0 a 255
1
= Retroazione della velocità 03.02
Smorzamento solo sulla retroazione
(forzatura della retroazione).
Filtro errore di velocità
Ú
da 0 a 255
128
Ö
128
256
Costante - Tempo filtro = ------------------------------6f × ( 03.05 )
dove f =frequenza di alimentazione
Un filtro passa-basso per ridurre l'effetto sul segnale di errore di velocità
(03.04) dell'inteferenza proveniente da un generatore tachimetrico
(tachimetro), per esempio.
03.26
Ingresso generatore tachimetrico
RO
Ú
±1000
Bi
Ö
Controlla la misura dell'ingresso tachimetrico. Il potenziometro del
tachimetro viene utilizzato per scalare il segnale di retroazione in modo
che alla piena velocità del motore, 03.26 = 1000. Le unità
visualizzate = 0,1% dell'intera velocità per incremento.
Ú
03.28
Ú
Riservato
±1000
Bi
Ö
Guadagno proporzionale x 4
0o1
Bit
Ö
0
L'impostazione di questo parametro a 1 determina l'aumento del
guadagno proporzionale in anello di velocità per il fattore 4.
03.29
Guadagni in anello di velocità / 8
RW
Ú
Soglia di velocità zero
da 0 a 255
Uni
Ö
RW
Uni
Ö
RW
Ú
3
RO
Utilizzato come regolazione fine nel segnale di riferimento velocità per
correggere o inserire un piccolo offset.
Il valore 0 determina un offset di -8 unità, il valore di default dà un offset
zero e il valore 255 produce un offset di +8 unità.
03.23
= Riferimento di velocità 03.01
Feed-forward di velocità
Offset fine di velocità
RW
1
2
Bit
Quando 03.21 = 1, l'uscita della rampa viene aggiunta nel punto di
sommatoria dell'anello di velocità.
03.22
Ö
Il termine derivativo del PID nell'anello di velocità può utilizzare una delle
tre sorgenti
1
= Errore di velocità 03.06
Variazioni di smorzamento nella richiesta di velocità e
nella retroazione
03.27
Selettore uscite rampe
RW
Uni
0
Selettore abbassamento di tensione
RW
1,2 o 3
RW
Ö
Se 03.19 è impostato a 1 e Riferimento ATTIVO (01.11) = 1, il riferimento
Velocità reale (3.18) viene aggiunto al punto di sommatoria dell'anello di
velocità.
03.20
Ú
03.25
Bit
Sorgente termine derivativo
RW
Selettore riferimento di velocità reale
RW
Ú
03.24
0o1
Ö
Bit
0
Quando è impostato, i guadagni in anello di velocità vengono ridotti per il
fattore 8 in modo che:
Uni
16
La soglia può essere regolata a qualsiasi valore fino al 25,5% della
velocità massima. Vedere inoltre il 10.09.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
03.09
GUADAGNO P = --------------64
03.10 × 6 × f
GUADAGNO I = -------------------------------2048
51
8.6.4
Menu 04: Selezione della corrente e limiti
L'ingresso principale è l'uscita dell'anello di velocità 03.07 in
combinazione, per i modi di controllo della coppia o della corrente, con il
riferimento di coppia 04.08. Questi ingressi diventano la richiesta di
corrente alla quale può essere applicata un'opzione di offset o di
compensazione. Il risultato è quindi vincolato a un limite di esclusione
derivato da varie sorgenti, compresa la retroazione della velocità. Sei
parametri bit determinano il modo di controllo: controllo della velocità,
controllo della corrente, numero di quadranti, ecc.
Una funzione di questo menu è la possibilità di applicare un secondo
limite di corrente (04.07) automaticamente; vedere 04.10, 04.18 e 04.19
che consentono l'applicazione del limite di corrente 2 dopo un intervallo
di tempo predeterminato. Questa funzione è appropriata in applicazioni
in cui la coppia di carico iniziale è elevata all'avviamento, per poi
diminuire dopo un certo intervallo, come per esempio in alcuni processi
meccanici di miscelazione.
04.01
Ú
±1000
Bi
Ö
Il segnale di richiesta di corrente è l'ingresso di controllo nell'anello di
corrente quando il convertitore viene azionato nel modo di controllo di
velocità. Il segnale è soggetto a un limite imposto da 04.04, 04.05 e
04.06 prima di essere trasferito all'anello di corrente.
04.02
Richiesta di corrente finale
RO
Ú
±1000
Limite di corrente ponte 2
RW
Ú
da 0 a 1000
Ú
Bi
04.07
Limite di corrente 2
RW
Ú
da 0 a 1000
04.08
Ú
±1000
Ú
04.10
Limite di corrente (punto di inizio
rastremazione)
da 0 a 1000
Ú
Offset di corrente
±1000
Ö
Bi
Ö
+000
Selettore limite di corrente 2
RW
Ú
0o1
04.11
+1000
Bit
Ö
0
Selettore offset di corrente
RW
Ú
0o1
Ö
04.12
Ú
+1000
Determina il limite massimo della richiesta di corrente quando il ponte 1,
quello positivo, è in conduzione. Esso fa sì che qualsiasi richiesta di
corrente superiore al valore limite sia ignorata.
0
Bit 0 modo
RW
Uni
Bit
Impostare 04.11 = 1 per selezionare l'offset di corrente.
Limite di corrente ponte 1
da 0 a 1000
+000
Uni
Ö
RW
Ö
Impostare 04.10 = 1 per selezionare il limite di corrente 2. Il suo
cambiamento può essere provocato automaticamente (vedere 04.18
e 04.19).
Questo parametro fornisce il limite di corrente simmetrica per i ponti 1 e
2 e costituisce il punto di riferimento dal quale intervengono le funzioni di
rastremazione della corrente, vedere 04.20 e 04.21. Il limite I 1 può
essere utilizzato in un'applicazione in cui la potenza nominale del
motore è alquanto inferiore rispetto a quella del convertitore, come
alternativa al cambiamento dei resistori con carico di corrente fisso.
04.05
Bi
L'offset di corrente viene usato per applicare una regolazione alla
richiesta di corrente 04.01.
Bi
Ö
RW
+1000
Riferimento di coppia
RW
Ú
È il valore limite della richiesta di corrente ed è il risultato del calcolo di
rastremazione corrente dipendente dalla velocità o il limite I 2
(se selezionato), a seconda di quale dei due è minore.
04.04
Uni
Ö
RW
04.09
Esclusione limite di corrente
±1000
+1000
Questo valore è un ingresso nell'anello di corrente e può essere
selezionato per l'utilizzo in applicazioni che richiedono il controllo diretto
della corrente (coppia motore).
Ö
RO
Ö
Determina il limite massimo della richiesta di corrente quando il ponte 2,
quello negativo, è in conduzione. Esso fa sì che qualsiasi richiesta di
corrente superiore al valore limite sia ignorata.
Uscita finale della richiesta di corrente inviata all'anello di corrente
(Menu 05) dopo l'applicazione dei limiti.
04.03
Uni
Disponibile come limite di corrente supplementare. Si applica a entrambi
i ponti. Il convertitore può essere programmato, se lo si desidera,
per selezionare automaticamente 04.07 a un intervallo di tempo
programmato dopo un segnale di MARCIA. Vedere 04.10, 04.18 e
04.19.
Richiesta di corrente
RO
04.06
0o1
Ö
Bit
0 (non selezionato)
Impostare 04.12 = 1 per selezionare. Opera in combinazione con 04.13
per configurare il convertitore per il controllo della velocità o per uno dei
tre modi di controllo della coppia. Vedere 04.13.
52
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
04.13
Figura 8-3 Controllo della coppia con variazione della velocità
Riferimento negativo di coppia
Bit 1 modo
RW
M
Bit
M
a
Ú
Ö
0o1
Impostare 04.13 = 1 per selezionare. Opera in combinazione con 04.12
per configurare il convertitore per il controllo della velocità o per uno dei
tre modi di controllo della coppia, come riportato di seguito:
04.12 = 0 e 04.13 = 0
Modo di controllo della velocità (configurazione di default).
04.12 = 1 e 04.13 = 0
Controllo base della corrente o della coppia.
04.12 = 0 e 04.13 = 1
Modo di controllo della coppia con variazione della velocità.
04.12 = 1 e 04.13 = 1
Modo di controllo avvolgitore/svolgitore.
Modo di controllo della velocità
L'uscita dell'anello di velocità diventa l'ingresso di richiesta di corrente
nell'anello di corrente.
Modo di controllo base della corrente o della coppia
In questo modo, il riferimento di coppia 04.08 è l'ingresso nell'anello di
corrente ed è soggetto alle limitazioni dell'esclusione del limite di corrente
04.03, ai limiti del Ponte 1 e del Ponte 2 04.05 e 04.06, nonché alla
velocità di variazione della corrente 05.04.
La logica di motore fermo (05.18) dovrà essere disabilitata se si utilizza il
controllo della coppia.
Modo di controllo della coppia con variazione della velocità
Vedere la Figura 8-2 e la Figura 8-3.
In questo modo, l'uscita dell'anello di velocità è protetta sul valore del
riferimento di coppia 04.08, oppure a zero a seconda che l'errore di
velocità 03.06 sia positivo o negativo e che il riferimento di coppia sia
positivo o negativo, ovvero in funzione delle polarità relative.
Nei due quadranti per motorizzazione, la velocità viene limitata al valore
della richiesta di velocità finale 03.01, in modo da impedire l'aumento
incontrollato della velocità alla rimozione del carico. Il convertitore deve
essere regolato per funzionare a una leggera sovravelocità quando il
carico è scollegato al fine di assicurare l'adeguata richiesta di corrente a
tutte le velocità.
Nei due quadranti rigenerativi, la richiesta di corrente impostata dal
riferimento di coppia 04.08 viene disabilitata quando la velocità è minore
di quella impostata dalla richiesta di velocità finale 03.01. Ciò impedisce
la riduzione della coppia di carico che determina l'inversione della
rotazione. Il valore di 03.01 deve essere zero.
Figura 8-2 Controllo della coppia con variazione della velocità
Riferimento positivo di coppia
M
M
04.08
04.08
n
03.06 +ve
03.06 -ve
n
03.06 +ve
03.01
a
b
0 (non selezionato)
n
n
04.08
03.06 +ve
04.08
03.06 -ve
03.06 +ve
03.01
03.06 -ve
03.01
a Q4 - Rotazione avanti.
b Q3 - Frenatura inversa.
La coppia negativa, la frenatura avanti e la rotazione inversa sono applicate al
valore di 03.01 quando l'errore di velocità 03.06 è negativo. Quando tale errore
è positivo, la coppia è zero.
Uno svantaggio di questo modo è che non può fornire coppia a una velocità
particolare né in accelerazione, né in decelerazione. In questo modo, il
parametro 04.08 si comporta come un limite di corrente controllabile.
Modo di controllo avvolgitore/svolgitore
Vedere la Figura 8-4 e la Figura 8-5.
Questo modo consente l'applicazione della coppia in entrambi i sensi,
per l'accelerazione e per la decelerazione, impedendo al contempo
l'aumento incontrollato della velocità o l'inversione se il carico diventa
zero. Quando la richiesta di coppia è nel senso opposto a quello della
retroazione della velocità, questo modo seleziona automaticamente il
riferimento di velocità zero.
Per un avvolgitore, l'offset 01.04 deve essere impostato a un valore
appena positivo in modo che 03.01 sia maggiore del riferimento della
velocità di linea. Quando un intero aspo (di un avvolgitore) decelera,
la richiesta di coppia può essere negativa. Poiché la retroazione della
velocità è positiva, il riferimento di velocità viene automaticamente
portato a zero in modo che l'errore di velocità diventi negativo.
Essendo quindi la richiesta di coppia e l'errore di velocità entrambi
negativi, viene applicata la coppia di decelerazione.
Per uno svolgitore, l'offset 01.04 deve essere impostato a un valore
appena negativo in modo che vi sia un errore di velocità negativo alla
velocità zero. (L'errore negativo di velocità è necessario per produrre una
coppia negativa al fine di mantenere la tensione alla velocità zero.)
All'aumento del riferimento della velocità di linea, 03.01 diventa positivo.
Una scalatura opportuna dell'ingresso deve essere applicata in modo che
03.01 sia sempre maggiore della retroazione della velocità e che sia così
mantenuto un errore di velocità positivo 03.06. Poiché la retroazione della
velocità è positiva, la velocità zero viene selezionata automaticamente
ogniqualvolta la richiesta di coppia è negativa (funzionamento normale),
ma se detta richiesta diventa positiva, allora il valore di 03.01 diventa la
richiesta di velocità e viene consentita la coppia di accelerazione,
a condizione che la velocità dell'aspo non sia maggiore di 03.01.
Per le applicazioni di avvolgitore/svolgitore, il riferimento della velocità di
linea corrisponde alla velocità dell'aspo al diametro minimo.
Figura 8-4
M
03.06 -ve
03.01
b
a Q1 - Rotazione avanti.
b Q2 - Frenatura inversa.
La coppia positiva, la rotazione avanti e la frenatura inversa sono applicate al
valore di 03.01 quando l'errore di velocità 03.06 è positivo. Quando tale errore
è negativo, la coppia è zero.
04.08
03.06 +ve
03.06 -ve
n
Coppia di
decelerazione
03.01
Avvolgitore in decelerazione.
Richiesta di coppia negativa.
03.01 - > 0, con la retroazione
della velocità positiva.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
53
Quando questo bit viene abilitato, il selettore del limite di corrente 2 è
automaticamente commutato su 1 dopo un intervallo di tempo impostato
da 04.19. Il convertitore può essere programmato per selezionare
automaticamente 04.07 a un intervallo di tempo predefinito (04.19)
dopo un segnale di MARCIA.
Figura 8-5
M
03.01
04.08
Coppia di
accelerazione
03.06 +ve
04.19
03.06 -ve
Timer limite di corrente
n
RW
Ú
Marcia
normale
Svolgitore in accelerazione.
Richiesta di coppia positiva, 03.01 è al valore impostato.
Richiesta di coppia negativa (in velocità)
03.01 -> 0 automaticamente, per mantenere la tensione.
04.14
Abilitazione quadrante 1
RW
Ú
0o1
Bit
Ö
RW
Ú
0o1
Bit
Convert. 1Q: 0
(disabilitato)
Ö
Convert. 4Q: 1 (abilitato)
Il funzionamento nel quadrante 2 è definito come rigenerazione nella
direzione inversa, con la velocità e la coppia aventi rispettivamente un
valore negativo e positivo.
04.16
Abilitazione quadrante 3
RW
Ú
0o1
Convert. 1Q: 0
(disabilitato)
Ö
Ú
da 0 a 1000
Convert. 4Q: 1 (abilitato)
Il funzionamento nel quadrante 3 è definito come motorizzazione nella
direzione inversa, con la velocità e la coppia aventi entrambi un valore
negativo.
Ö
04.21
Abilitazione quadrante 4
RW
RW
da 0 a 1000
Ú
0o1
Convert. 1Q: 0
(disabilitato)
Ö
Convert. 4Q: 1 (abilitato)
Il funzionamento nel quadrante 4 è definito come rigenerazione nella
direzione avanti, con la velocità e la coppia aventi rispettivamente un
valore positivo e negativo.
04.18
Ö
+1000
04.22
Pendenza rastremazione di corrente 1
da 0 a 255
Ö
Uni
000
Imposta la velocità di cambiamento del limite della corrente d'indotto
rispetto alla velocità in entrambe le direzioni di rotazione, oltre la soglia
impostata da 04.20.
Fattore di scalatura
Vedere la Figura 8-6
∆l 1
04.22 = 128 × ---------∆n 1
Abilitazione commutazione automatica
limite di corrente 2
RW
Ú
Uni
Imposta un valore soglia della retroazione della velocità, oltre il quale
04.25 commuta su 1 per indicare che detta soglia è stata superata, ed è
il punto di inizio della rastremazione 2 (se implementata). La corrente
d'indotto si riduce, come funzione della velocità, a una velocità definita
da 04.23. Questo parametro può inoltre essere utilizzato come soglia di
velocità per uso generale.
Ú
Bit
+1000
Soglia rastremazione di corrente 2
RW
04.17
Uni
Imposta un valore di soglia della retroazione della velocità, oltre il quale
04.24 commuta su 1 per indicare che la soglia è stata superata, ed è il
punto di inizio della rastremazione 1 (se implementata). La corrente
d'indotto si riduce, come funzione della velocità, a una velocità definita
da 04.22. Questo parametro può inoltre essere utilizzato come soglia di
velocità per uso generale.
Se si utilizza una sola rastremazione, deve essere la Rastremazione 1.
Se si impiegano entrambe, la Rastremazione 1 deve essere la prima.
Ú
Bit
000
Soglia rastremazione di corrente 1
1 (abilitato)
Abilitazione quadrante 2
RW
Ö
L'intervallo di tempo può essere programmato fino a 255 secondi.
Se 04.18 =1, il limite di corrente 2 viene selezionato automaticamente
una volta trascorso il tempo preimpostato dopo un comando di MARCIA.
Questa funzione è appropriata in applicazioni in cui il motore ha una
potenza istantanea, come nei macchinari di miscelazione, dove il carico
d'avviamento è elevato e scende a un valore costante solo dopo un
certo periodo di funzionamento della macchina.
04.20
Il funzionamento nel quadrante 1 è definito come motorizzazione in
direzione avanti, con la velocità e la coppia aventi valori positivi.
04.15
da 0 a 255
Uni
0o1
Ö
Bit
0 (disabilitato)
54
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Figura 8-6
I
04.22
∆Ι 1
04.23
∆Ι 2
∆n1
04.20
∆n2
n
04.21
Calcolo dei gradienti 1 e 2 di rastremazione corrente.
Vedere il testo, parametri 04.22 e 04.23.
04.23
Pendenza rastremazione di corrente 2
RW
Ú
da 0 a 255
Uni
Ö
000
Imposta la velocità di cambiamento del limite I d'indotto rispetto alla
velocità in entrambe le direzioni di rotazione, oltre la soglia impostata da
04.21.
Fattore di scalatura
Vedere la Figura 8-6
∆l 2
04.23 = 128 × ---------∆n 2
04.24
Soglia rastremazione 1 superata
RO
Ú
0o1
Bit
Ö
0
Impostato a 1 quando il valore di soglia di 04.20 viene superato.
04.25
Soglia rastremazione 2 superata
RO
Ú
0o1
Ö
Bit
0
Impostato a 1 quando il valore di soglia di 04.21 viene superato.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
55
8.6.5
Menu 05: Anello di corrente
Questa è la fase finale nell'elaborazione dei riferimenti e delle retroazioni
di velocità e coppia al fine di determinare il segnale finale dell'angolo di
innesco. L'ingresso principale normale è la richiesta finale di corrente,
che è vincolata al limite tempo di variazione e sommata algebricamente
alla retroazione della corrente, poi ulteriormente modificata da qualsiasi
altra impostazione che possa essere stata applicata al gruppo dei
parametri dell'Anello di corrente.
La retroazione della corrente, dopo la scalatura, fornisce un segnale
leggibile per la visualizzazione in ampere della corrente effettiva.
La retroazione della corrente è inoltre una funzione importante per la
protezione del convertitore. Il segnale di retroazione viene controllato in
relazione alla soglia di sovraccarico selezionata e modificato in base ai
valori preprogrammati del tempo di sovraccarico. La presenza di due
parametri per il tempo di sovraccarico consente l'applicazione delle
impostazioni in modo da tenere conto del fatto che il tempo di
raffreddamento di un motore può essere maggiore di quello del suo
riscaldamento.
Per il funzionamento del convertitore, l'ondulazione di corrente misurata
sul terminale 11, cioè un segnale di tensione che indica la retroazione
della corrente, deve essere almeno di 0,6 V in assenza di forza
controelettromotrice, ovvero alla velocità zero. Il livello di corrente
misurato nel punto di conduzione continua con questo livello di
ondulazione è pari al 9,2% del valore nominale del convertitore. Con la
versione software V5 (o superiore), il parametro software 05.29
consente all'utente di aumentare il carico della retroazione della corrente
per il fattore 1,6. Il software scala la retroazione della corrente in modo
diverso al fine di compensare la variazione del valore di carico.
Quando 05.29 è impostato e i carichi sono stati variati, il valore minimo
dell'ondulazione si ha al 5,7% della potenza nominale del convertitore.
I carichi non devono essere cambiati se l'ondulazione sul terminale è
maggiore di 0,6 V.
05.01
±1000
Ú
da 0 a 255
Dove:
S
= tempo di variazione in ampere s-1
f
= frequenza dell'alimentazione in Hz
Imax = corrente max. (A)
Per limitare il tempo di cambiamento della corrente, occorre ridurre il
valore del parametro 05.04.
05.05
Ú
da 0 a 1999
Ú
La corrente massima d'uscita, in ampere, viene scalata da questo
parametro. Ciò non influisce in alcun modo sulla protezione del motore.
L'impostazione di 05.05 viene calcolata come segue:
05.06
Soglia di sovraccarico
RW
da 0 a 1000
Uni
Ö
+700
Imposta la soglia della retroazione della corrente d'indotto oltre la quale
inizia l'integrazione della protezione contro il sovraccarico
corrente-tempo.
Bi
A
N
NOTA
Per disabilitare l'allarme per correnti di sovraccarico, occorre impostare i
parametri 05.07 e 05.08 a 0.
Tempo di integrazione sovraccarico
(riscaldamento)
05.07
Angolo d'innesco
da 277 a 1023
Corrente nominale
convertitore
05.05 = Imax x 10 se Imax <200A
Ö
RO
Ö
Uni
05.05 = Imax se 200A < Imax<1999A
Il segnale di retroazione della corrente, modificato dal fattore di
scalatura, diventa disponibile come indicazione in ampere.
Vedere inoltre 05.05.
05.03
Corrente massima (scalatura)
RW
Bi
Retroazione della corrente (ampere)
±1999
040
I max × 6f × 05.04
Definito come: S = --------------------------------------------256
Ú
Ú
Ö
Questo parametro limita il tempo massimo di variazione della richiesta di
corrente. Tipi precedenti di motore, soprattutto con esecuzione non
laminata, possono presentare una tendenza alla scarica esterna se il
tempo di cambiamento della corrente è troppo elevato per il ritardo
intrinseco degli avvolgimenti dei poli di commutazione.
Ö
R0
Uni
I max
05.05 = ----------- se Imax >1999A
10
Il segnale di retroazione della corrente è derivato dai trasformatori di
corrente interni. Viene utilizzato per il controllo in anello chiuso e per
l'indicazione della corrente d'indotto, nonché per attivare la protezione
del motore.
05.02
Limite tempo di variazione
RW
Retroazione della corrente
RO
Ú
05.04
RW
Uni
Ú
Ö
Questa è l'uscita dell'algoritmo dell'anello di corrente e il riferimento
d'ingresso al circuito ASIC, che genera gli impulsi di innesco.
05.03 = 1023 indica la piena fasatura in avanti.
da 0 a 255
Ö
Uni
030
S
Tempo di integrazione per 05.06. Da utilizzare in combinazione con
05.08, in modo che 05.07 < 05.08.
1000 – ( 05.06 )
Il tempo t prima dell'allarme è: t = ( 05.07 ) × --------------------------------------------( 05.01 ) – ( 05.06 )
Vedere anche il parametro 10.18, nel Menu 10.
NOTA
N
Per disabilitare l'allarme per correnti di sovraccarico, occorre impostare i
parametri 05.07 e 05.08 a 0.
56
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
05.08
RW
Ú
05.11
Tempo di integrazione sovraccarico
(raffreddamento)
da 0 a 255
RO
Uni
Ö
Ú
050
S
Tempo di integrazione per 05.06. Da utilizzare in combinazione con
05.07, in modo che 05.07 < 05.08.
1000 – ( 05.06 )
Il tempo t per il reset è: t = ( 05.08 ) × --------------------------------------------( 05.06 ) – ( 05.01 )
Abilitazione autotaratura avviamento
RW
Ú
10
( 1000 – ( 05.06 ) ) × -----16
0o1
Ö
Una volta completato il processo di autotaratura, il relè di convertitore
pronto si apre per 50 ms, dopodiché il parametro di autotaratura viene
impostato automaticamente sulla disabilitazione (05.09 = 0). Lo scopo di
questo processo è di consentire l'avvio della sequenza di autotaratura in
presenza di un consenso marcia, ma di riportare poi il convertitore in una
condizione sicura dopo il completamento dell'autotaratura. Può rivelarsi
necessario bloccare l'albero del motore nel caso in cui tenda a ruotare
durante questa procedura.
NOTA
N
1. Quanto detto sopra presume che il relè di convertitore pronto sia
interbloccato con qualsiasi consenso marcia presente.
2. Se il motore viene azionato con il controllo di campo (Menu 06),
il campo sarà disattivato automaticamente.
3. Modifica i parametri da 05.12 a 05.15.
05.10
Ú
0o1
Ö
Guadagno integrale discontinuo
RW
Ú
da 0 a 255
Uni
Ö
16
Impostato dal parametro Autotaratura all'avviamento 05.09.
Questo parametro è impostato per correggere eventuali errori nella
previsione dell'angolo d'innesco nell'area di corrente non in servizio
continuo. Se 05.15 è impostato correttamente, 05.12 ha un effetto
modesto, ma qualora sia a un valore troppo alto, si produce instabilità.
Valore di 05.12
Guadagno applicato = -----------------------------------------128
05.13
Guadagno proporzionale continuo
RW
Ú
da 0 a 255
Uni
Ö
16
Impostato dal parametro Autotaratura all'avviamento 05.09.
Questo parametro consente all'anello di corrente di seguire molto da
vicino una variazione di gradino della corrente. Se è impostato a un
valore eccessivamente alto, si avrà una sovraelongazione. Se invece il
suo valore è troppo basso, il nuovo valore di corrente sarà raggiunto con
eccessiva lentezza.
Valore di 05.13
Guadagno applicato = -----------------------------------------256
Finecorsa ridotto
RW
N
0, disabilitato
Scollegare il campo del motore se si utilizza un campo fisso.
(Terminali aperti L11 e L12 nella versione europea del convertitore).
Attenersi alle procedure di sicurezza approvate!
Abilitare l'autotaratura impostando 05.09 =1.
Abilitare il convertitore mediante l'ingresso TB4-31.
•
•
•
NOTA
Per disabilitare l'allarme per correnti di sovraccarico, occorre impostare i
parametri 05.07 e 05.08 a 0.
05.12
Bit
Per ottenere l'autotaratura dell'anello di corrente durante l'avviamento:
•
Ö
La velocità alla quale 05.11 aumenta o diminuisce è controllata dai valori
rispettivamente di 05.07 e di 05.08.
N
Per disabilitare l'allarme per correnti di sovraccarico, occorre impostare i
parametri 05.07 e 05.08 a 0.
05.09
da 0 a 1999
Uni
Controlla il valore del sovraccarico di integrazione corrente-tempo.
Quando il valore raggiunge il punto di allarme determinato da 05.06,
05.07 e 05.08, si verifica un allarme per sovraccarico. L'allarme per
sovraccarico interviene quando 05.11 raggiunge il valore dato da:
Vedere anche il parametro 10.18, nel Menu 10.
NOTA
Sovraccarico effettivo
Bit
05.14
Guadagno integrale continuo
0
Il finecorsa consente alla tensione d'indotto di aumentare, durante la
rigenerazione, fino a 1,16 x tensione d'alimentazione. Con alimentazioni
molto morbide, il finecorsa può essere troppo vicino al punto
d'intersezione. L'impostazione di 05.10 = 1 aumenta il margine di
sicurezza, ma riduce la tensione massima rigenerata d'indotto a 1,05 x
tensione di alimentazione.
L'impostazione di questo parametro può essere necessaria nei sistemi
con funzionamento a 12 impulsi in serie.
RW
Ú
da 0 a 255
Ö
Uni
16
Impostato dal parametro Autotaratura all'avviamento 05.09. Il suo valore
dipenderà dalla costante di tempo del motore. L'aumento del valore di
05.14 determina un miglioramento della risposta dell'anello di corrente,
ma a rischio di provocare instabilità.
Se questo parametro è impostato a un valore troppo basso, può risultare
un errore fra i valori della ‘Richiesta di corrente’ e della ‘Retroazione
della corrente’.
Valore di 05.14
Guadagno applicato = -----------------------------------------512
NOTA
N
Questo parametro non viene impostato dal sottoprogramma di
autotaratura continua.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
57
05.15
Costante del motore
RW
Ú
da 0 a 255
05.20
Uni
RW
Ö
Riservato
RW
Ú
0o1
05.21
Bit
Ö
0o1
Bit
Ö
Ú
Ú
0o1
Ö
Ö
Ú
0o1
Ö
RW
L'impostazione di 05.19 = 1 ha l'effetto di non abilitare la logica di
motore fermo quando il segnale di stop viene dato dal solo
riferimento. Questa condizione consente pertanto velocità
micrometriche, l'orientamento dell'albero e altre funzioni che si
eseguono a una velocità vicino a zero, impedendo al contempo
qualsiasi velocità micrometrica dopo un comando di STOP.
0, abilitato
Abilitazione funz. a 12 impulsi in serie a 1
quadrante
0
05.19 = 1 la logica di motore fermo viene abilitata unicamente dopo
un comando di STOP.
Bit
L'impostazione di 05.22 = 1 disabilita il controllo adattativo.
Quando il controllo adattativo è abilitato (stato di default), l'anello di
corrente impiega due algoritmi diversi, uno dei quali applica un alto
valore di guadagno nell'area di corrente non in servizio continuo. Questa
funzione non è adatta per alcune applicazioni, come i carichi non relativi
ai motori, per le quali il controllo adattativo deve essere disabilitato.
05.23
05.19 = 0 la Logica di motore fermo viene abilitata dopo un comando
di STOP o un riferimento zero.
0, disabilitato
Disabilitazione controllo adattativo
RW
Modo motore fermo
Bit
0o1
Bit
Richiede l'impostazione solo per le installazioni di sistemi a 4Q con
funzionamento a 12 impulsi in parallelo comprendenti due convertitori
destinati a condividere il carico, al fine di impedire che un convertitore
cambi ponti quando l'altro è ancora in conduzione.
05.22
1, abilitato
Se la logica è abilitata, determina la retrofasatura completa dell'angolo
d'innesco quando il convertitore ha ricevuto un comando di STOP e
quando la velocità scende al di sotto dello 0,8% del valore massimo.
Dopo un breve ritardo, viene interrotto anche l'innesco dei tiristori (SCR).
Questa funzione impedisce la velocità micrometrica e viene utilizzata in
applicazioni in cui non occorre mantenere la coppia del motore ferma.
Vedere anche 05.19.
Qualora si selezioni il controllo della coppia, occorre disabilitare questo
parametro.
RW
Abilitazione esclusione ponte 2
RW
Abilitazione logica di motore fermo
RW
05.19
0, disabilitato
N
0, abilitato
Se è impostato a 1, disabilita l'innesco dei tiristori (SCR) (entrambi i
ponti) e resetta le rampe di accelerazione e di decelerazione.
Ú
Ö
Inibizione dell'innesco
RW
05.18
0o1
Quando questo parametro è abilitato, l'angolo d'innesco 05.03 è
controllato dal riferimento di post-rampa 02.01. Questo modo si rivela
prezioso per la diagnosi del sistema, in particolare quando si verifica
instabilità, in quanto consente al convertitore di funzionare senza
l'influenza dell'anello di velocità o dell'anello di corrente,
con conseguente eliminazione del loro effetto sul sistema.
NOTA
Questo parametro è riservato.
Ú
Ú
Questa funzione deve essere utilizzata con cautela. Quando il
riferimento è 02.01, non si ha alcuna protezione contro valori eccessivi
di accelerazione e di corrente o tensione di uscita, salvo l'allarme
istantaneo per sovracorrente. Provvedere inoltre a resettare 05.20 = 0
dopo il completamento delle prove.
Ö
05.17
Bit
25
Questo parametro viene utilizzato per scalare la richiesta di corrente in
modo che l'anello di controllo preveda correttamente l'angolo d'innesco
nell'area di corrente non in servizio continuo. Viene impostato
automaticamente dal parametro Autotaratura all'avviamento 05.09.
05.16
Abilitazione controllo diretto angolo
d'innesco
Ú
0o1
Ö
Bit
0, disabilitato
L'abilitazione di questa funzione configura il convertitore per la fornitura
di impulsi d'innesco
normali e ritardati ai due ponti a tiristori da una scheda di potenza.
Gli impulsi della porta per il ponte con tiristore ritardato sono indirizzati ai
terminali dal n. 7 al n. 12 del connettore PL1 della scheda di controllo
(MDA1). Questa funzione non può essere abilitata se uno dei quadranti
del Ponte 2 04.16 e 04.17 è abilitato.
Se si devono utilizzare due schede di potenza, allora 05.23 non deve
essere impostato e occorre utilizzare una scheda MDA1 speciale
(codice prodotto 9201-0784).
58
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
05.24
Funzionamento a 12 impulsi in serie
RW
Ú
0o1
Ö
RW
0, disabilitato
N
Il modo di funzionamento in serie a 12 impulsi è sensibili alle fasi.
La rotazione sullo stack di terminali deve essere nella sequenza L1, L2,
L3 (10.11 = 1).
Ú
Funzionamento a 12 impulsi in parallelo
RW
Ú
0o1
Bit
Ö
0, disabilitato
Questo parametro informa il convertitore di operare nel modo a 12
impulsi in parallelo e deve essere impostato per il funzionamento nel
modo a uno o a quattro quadranti. Per il funzionamento a 4 quadranti,
il parametro 05.21 (vedere sopra) deve essere impostato a 1 e l'ingresso
F10 di ogni convertitore deve essere collegato all'uscita ST5 dell'altro.
Inoltre, occorre collegare i terminali 0V di controllo di entrambi i
convertitori.
05.26
Ö
0, disabilitato
05.29
Retroazione aumentata della corrente
RW
0o1
Ö
Bit
0, disabilitato
Se il convertitore viene utilizzato con un motore provvisto di un indotto
ad alta induttanza, come i motori per impianti di sollevamento, i resistori
di carico per la retroazione della corrente possono essere incrementati
(per un fattore di 1,6 volte) al fine di aumentare il segnale di retroazione
della corrente. Ciò aumenta il controllo della corrente a bassi livelli di
corrente. Se i carichi sono stati aumentati, occorre impostare questo
parametro bit affinché il software consenta ai limiti di corrente di
rimanere invariati.
L'impostazione di questo parametro influisce su 05.15 e quindi non deve
essere impostato vicino al suo valore massimo di 255 quando si produce
induzione continua a correnti bassissime. Affinché ciò fosse preso in
considerazione, i sottoprogrammi di autotaratura sono stati modificati.
Commutazione extra-sicura del ponte
RW
Ú
0o1
Bit
Si produce isteresi alla commutazione di un ponte al fine di impedire
l'oscillazione fra i due ponti in condizioni di carico leggero. In applicazioni
che richiedono il controllo fine della corrente, l'isteresi alla
commutazione di un ponte può essere ridotta dall'1,6% allo 0,2% della
corrente massima del convertitore mediante l'impostazione di questo
parametro.
Ú
05.25
Isteresi ridotta per commutazione ponte
Bit
Questo parametro deve essere impostato per il funzionamento nel modo
a 12 impulsi a uno o a quattro quadranti. Il parametro 05.23 (vedere
sopra) viene letto dal software solo all'accensione e durante un reset
ciclico (un reset quando il convertitore è disabilitato). Se uno dei
quadranti del Ponte 2 è abilitato quando 05.23 viene letto, le uscite non
vengono distribuite nel circuito ASIC e 05.23 viene impostato a 0.
NOTA
05.28
0o1
Bit
Ö
0, disabilitato
Quando è abilitato (=1), il parametro 05.26 applica un margine di
sicurezza supplementare di 1 ciclo di alimentazione alla logica di
commutazione dei ponti. Questo parametro può essere richiesto per
carichi altamente induttivi, come un avvolgimento di campo di un
motore.
05.27
Autotaratura continua
RW
Ú
0o1
Ö
Bit
0, disabilitato
Quando è impostato, abilita l'autotaratura continua che controlla senza
interruzioni l'ondulazione di corrente del motore e regola i guadagni in
anello di corrente per le prestazioni ottimali. L'autotaratura di messa in
servizio deve ancora essere eseguita in quanto il parametro 05.14 non è
impostato dall'autotaratura continua.
Il calcolo dei guadagni viene interrotto quando l'anello dello spill-over di
tensione diventa attivo in modo che i guadagni non siano aumentati
quando il campo è indebolito.
Questa funzione non è utilizzabile quando i convertitori sono impostati
nel modo seriale a 12 impulsi.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
59
8.6.6
Menu 06: Controllo di campo
Il Mentor II è provvisto del controllo di campo come parte del software
integrato. Se si utilizza un motore con un'alimentazione di campo non
controllata (fissa), questo menu non è applicato.
Questo convertitore è predisposto per la programmazione di due valori
selezionabili della corrente di campo massima. Inoltre, il valore minimo
della corrente massima di campo può essere controllato mediante un
temporizzatore programmabile affinché, quando il convertitore non è in
funzione, il campo possa essere commutato automaticamente sul modo
economia.
La richiesta risultante di corrente di campo viene sommata
algebricamente alla retroazione della corrente di campo per produrre un
errore di corrente che è l'ingresso per l'anello della corrente di campo.
L'uscita dell'anello della corrente di campo è l'angolo d'innesco,
vincolato al limite di finecorsa anteriore.
La corrente di campo può in alternativa essere controllata direttamente da
uno dei parametri del campo massimo 06.08 e 06.09 attraverso un ingresso
programmabile, oppure mediante un applicativo software ed è fornita una
funzione per il controllo diretto dell'angolo d'innesco, utile per fini diagnostici.
La richiesta di corrente di campo è l'uscita dell'anello di tensione della forza
controelettromotrice ed è vincolata ai valori programmati massimo e minimo
della corrente di campo. L'anello di tensione confronta il valore calcolato
della forza controelettromotrice con un valore preimpostato utilizzato come
fattore per la determinazione della richiesta della corrente di campo.
L'uscita dell'anello di tensione, quindi anche la richiesta della corrente di
campo, è al valore massimo quando la forza controelettromotrice
calcolata è inferiore al valore preimpostato. Quando il valore calcolato
supera il valore preimpostato (alla velocità base), l'anello di tensione
riduce la richiesta di corrente di campo al fine di regolare la forza
controelettromotrice calcolata al suddetto valore preimpostato.
In alternativa, l'utente può desiderare di non utilizzare l'anello di tensione,
bensì di immettere direttamente una richiesta di corrente. L'utente può
impostare i valori di due parametri della corrente di campo massima.
In questo modo, il valore preimpostato della forza controelettromotrice
deve essere regolato al massimo, in modo che l'anello di tensione richieda
sempre la corrente di campo massima. La richiesta di corrente è quindi il
parametro selezionato della corrente di campo massima.
06.01
Ú
da 0 a 1000
Ö
Ú
da 0 a 1000
Ö
Richiesta di corrente dall'anello della forza controelettromotrice,
vincolata ai limiti di 06.08, 06.09 e 06.10.
06.03
Retroazione corrente di campo
RO
Ú
da 0 a 1000
Uni
Ö
Compensazione caduta di tensione 2
RW
Ú
da 261 a 1000
( 03.08 ) × ( 06.06 )
Se 06.20 = 0: 06.05 = ---------------------------------------------2048
( 04.02 ) × ( 06.06 )
Se 06.20 = 1: 06.05 = ---------------------------------------------2048
Esempio di impostazione di 06.06
Tensione d'indotto
Tensione d'indotto
Resistenza d'indotto
IxR
= 400 V
= 200 A
= 0,1Ω
= 20 V
Per un M210 con una corrente d'indotto di 200 A
03.08 = 635 unità
20 × 2048
quindi, 06.06 = -------------------------- = 64 unità
635
06.07 = 380 V
Punto preimpostato forza
controelettromotrice
06.07
da 0 a 1000
La scalatura 06.04 = 1000 corrisponde alla piena fasatura in avanti.
Uni
Ö
+1000
V
Valore programmabile della forza controelettromotrice d'indotto in volt,
al quale il campo inizia a indebolirsi. Definita come la tensione alla quale
si raggiunge la velocità base.
06.08
Corrente di campo massima 1
da 0 a 1000
Uni
Ö
+1000
Valore programmabile della richiesta di corrente massima dell'anello della
forza controelettromotrice. Se il controllo del campo deve essere utilizzato
nel modo di corrente, questo parametro diventa il riferimento di corrente
dell'anello di controllo del campo e il punto preimpostato della forza
controelettromotrice deve essere generalmente impostato al valore
massimo per impedire la produzione di spillover; in alternativa, qualora sia
richiesta la protezione mediante spillover contro la sovratensione del
motore, il punto preimpostato della forza controelettromotrice deve essere
impostato alla tensione d'indotto massima.
Ú
Ö
000
Un fattore programmabile utilizzato per il calcolo della caduta di tensione
dell'indotto come correzione della tensione d'indotto misurata, al fine di
consentire il calcolo della forza controelettromotrice.
Corrente di campo massima 2
RW
Uni
Uni
Ö
da 0 a 255
Angolo d'innesco
RO
Ú
06.06
06.09
Retroazione all'anello della corrente di campo.
06.04
Valore risultante dall'applicazione di 06.06 all'ingresso integrale
dell'errore di velocità.
Ú
Uni
Bi
Ö
±1000
RW
Richiesta di corrente di campo
RO
Ú
Ú
Uni
Forza controelettromotrice del motore calcolata sulla base della tensione
d'indotto meno il valore 2 della compensazione caduta di tensione, 06.05.
Retroazione all'anello della forza controelettromotrice nel modo spillover.
06.02
RO
RW
Forza controelettromotrice
RO
Uscita di compensazione caduta di
tensione 2
06.05
da 0 a 1000
Ö
Uni
+500
Alternativa al parametro 06.08, da utilizzare come impostazione per
l'economia. Vedere 06.12, 06.14 e 06.15.
60
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
NOTA
06.10
Corrente di campo minima
RW
Ú
da 0 a 1000
Uni
Ö
+500
Valore minimo della richiesta di corrente per impedire un eccessivo
indebolimento di campo, per esempio con carichi che tendono a una
rotazione troppo elevata.
06.11
Scalatura retroazione corrente di campo
RW
Ú
da 201 a 216
Il controllo di campo può in alternativa essere implementato dal
Controller di campo FXM5 (vedere la sezione 11.7 Unità di controllo del
campo FXM5 a pagina 104) per una corrente di campo massima di 20 A.
06.12
Timeout economia di campo
RW
Uni
Ö
204
Ú
Il parametro 06.11 consente all'utente di applicare un fattore di scalatura
alla retroazione della corrente. L'uscita è il valore di 06.03. La corrente
nominale massima è di 2 A o di 8 A in base alla posizione del
collegamento (ponticello) J1.
Posizione J1
N
Il Mentor II può essere utilizzato con una scheda MDA3 versione 1
(revisione) con corrente massima di 5 A. Il parametro 06.11 ha quindi il
campo valori da 101 a 110 e un campo di corrente di campo da 0,5 A a
5 A con incrementi di 0,5 A.
Impostazione 06.11 Ampere max. MDA3
2A
201
0,5
2A
202
1,0
2A
203
1,5
2A
204
2,0
8A
205
2,5
8A
206
3,0
8A
207
3,5
8A
208
4,0
8A
209
4,5
8A
210
5,0
8A
211
5,5
8A
212
6,0
8A
213
6,5
8A
214
7,0
8A
215
7,5
8A
216
8,0
Figura 8-7 Ubicazione del ponticello J1
Vista dal disotto del convertitore
da 0 a 255
Uni
Ö
030
S
Consente al convertitore di essere configurato affinché il campo
massimo 2 (un'impostazione ridotta) sia selezionato automaticamente
dopo la disabilitazione del convertitore per un periodo (in secondi)
definito dal valore scelto per questo parametro. Questo assicura che gli
avvolgimenti non si surriscaldino se il convertitore viene arrestato e la
ventilazione del motore disattivata, oppure che sia mantenuto un livello
ridotto di corrente di campo per impedire la formazione di condensa
quando il motore non è utilizzato.
06.13
Abilitazione controllo di campo
RW
Ú
06.14
0o1
Ö
0, disabitato
Selettore campo massimo 2
RW
Ú
Bit
0o1
Bit
Ö
0, disabitato
Impostare su 1 per attivare il campo massimo 2. È controllato
automaticamente dalla funzione di timeout dell'economia di campo se
06.15 è impostato a 1. Il campo massimo 2 è selezionato dopo un ritardo
(vedere 06.12) quando viene fornito un segnale di disabilitazione del
convertitore.
06.15
Abilitazione timeout economia di campo
RW
Ú
0o1
Bit
Ö
0, disabitato
Se questo parametro è abilitato (=1), il parametro 06.14 viene controllato
automaticamente dalla funzione di timeout dell'economia di campo
quando viene rimosso il segnale di abilitazione del convertitore. Quando
il timeout è disabilitato, il parametro 06.14 diventa RW per l'utente.
06.16
Guadagno integrale in anello di corrente
di campo
RW
2A
8A
Ú
0o1
Bit
Ö 1, guadagno normale
Quando questo parametro è impostato a = 0, il guadagno integrale in
anello di corrente di campo viene aumentato per consentire all'anello di
seguire la richiesta di corrente più da vicino. Tuttavia, questo parametro
può produrre instabilità e quindi deve essere utilizzato unicamente se
occorre un rapido cambiamento di flusso e la costante di tempo del
campo è bassa.
Posizione J1
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
61
06.17
Guadagno integrale in anello di tensione
RW
Ú
0o1
Bit
Ö
– 1 Vdcπ
768
06.21 = 1023 – ------------ cos -------------------–1
180 °
2Vs
0, disabitato
Impostare 06.17 = 1 per raddoppiare il guadagno integrale qualora si
desideri una sovraelongazione minore.
06.18
Abilitazione regolazione guadagno di
velocità
RW
Ú
0o1
Questo parametro può essere impiegato quando la tensione di
alimentazione è notevolmente superiore a quella di campo richiesta al
fine di impedire una condizione di sovratensione.
Dove:
VDC = Tensione di campo richiesta
VS = Tensione di alimentazione
06.22
Selettore controllo medio o totale
RW
Bit
Ö
Ú
0, disabitato
Questo parametro regola i guadagni in anello di velocità (menu 03) per
compensare l'indebolimento del flusso di campo nel modo controllo di
campo, in modo che la risposta della coppia rimanga sostanzialmente
costante nell'intero campo di velocità.
06.08
Definito come: G = --------------06.02
0o1
06.23
Ridurre i guadagni per il fattore 2
RW
Ú
0o1
0, disabitato
06.24
Consente a 06.09 di controllare direttamente l'angolo d'innesco,
rimanendo vincolato unicamente al finecorsa anteriore. Permette il
funzionamento senza l'anello di tensione o di corrente per fini
diagnostici.
NOTA
N
In questo modo, non vi è protezione contro la corrente o la tensione di
campo eccessiva.
06.20
Ö
0
Ridurre i guadagni per il fattore 4
RW
Ú
0o1
Ö
Bit
0
L'impostazione di questo parametro a 1 riduce i guadagni della corrente
di campo per il coefficiente 4.
L'impostazione di entrambi i parametri 6.23 e 6.24 a 1 determina la
riduzione dei guadagni per il coefficiente 8.
Selettore compens. caduta di tensione
alternativa 2
RW
Ú
0o1
Bit
L'impostazione di questo parametro a 1 riduce i guadagni di corrente di
campo per il coefficiente 2.
Bit
Ö
RW
Ú
Controllo diretto angolo d'innesco
0, controllo medio
Fornisce l'opzione del controllo medio o totale. Disponibile unicamente
con il Controller di campo FXM5. Per utilizzare l'FXM5 nel modo
Controllo totale, impostare 06.22 = 1 e LK3 nella posizione di Controllo
totale.
Dove:
G = Fattore di regolazione del guadagno in anello di velocità
06.19
Ö
Bit
0o1
Bit
Ö
0 (= 03.08)
Determina la sorgente della Compensazione caduta di tensione 2.
La selezione della sorgente può essere il parametro Integrale errore di
velocità 03.08 (impostato a 0) o la richiesta di corrente finale 04.02
(impostato a 1).
06.21
Finecorsa anteriore angolo d'innesco
RW
Ú
da 0 a 1000
Ö
Uni
+1000
Limita l'anticipo dell'angolo d'innesco nei casi in cui un anticipo di 180o
causerebbe l'applicazione di una sovratensione agli avvolgimenti di
campo.
62
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.7
Menu 07: Ingressi e uscite analogici
I parametri di scalatura hanno un campo di moltiplicazione da 0,001
a 1,999 (il moltiplicatore zero determinerebbe il valore zero del
parametro).
I parametri Sorgente e Destinazione definiscono un parametro da
utilizzare come ingresso o uscita, determinando così la funzione dei
terminali di ingresso e di uscita programmabili.
Il Menu 07 contiene tre gruppi di ingressi/uscite analogici. Vi sono due
gruppi separati di ingresso analogico. Il primo è un ingresso analogico a
12 bit ed è normalmente utilizzato come ingresso del riferimento di
velocità (vedere il Menu 01, Diagramma B), ma può in alternativa essere
programmato come qualsiasi destinazione RW reale (ma non come
valore intero).
Una elevata accuratezza è raggiunta mediante la conversione da
tensione a frequenza. Il terminale può essere programmato come
ingresso di tensione o come ingresso dell'anello di corrente, con le
opzioni 0-20 mA, 20-0 mA, 4-20 mA o 20-4 mA.
Il secondo gruppo fornisce un mezzo flessibile per la scalatura e
l'assegnazione di destinazioni ai quattro ingressi per uso generale GP1,
GP2, GP3 e GP4, tutti con risoluzione a 10 bit.
07.05
Ingresso di riferimento velocità
RO
Ú
±1000
Ingresso per uso generale 1
RO
Ú
±1000
Bi
Ö
07.06
Tensione efficace d'ingresso
RO
Ú
da 0 a 1000
07.02
Ingresso per uso generale 2
RO
Ú
±1000
Bi
07.07
Visualizza il valore del segnale analogico applicato al terminale TB1-05.
Può essere utilizzato come ingresso per uso generale per il
monitoraggio, oppure per applicazioni speciali del Processore 2.
07.03
Ingresso per uso generale 3
RO
Ú
±1000
Ú
Ingresso per uso generale 4
±1000
Ú
Temperatura dissipatore di calore
da 0 a 1000
Uni
oC
Ö
Controlla la temperatura dello stack di tiristori (SCR) sui convertitori
provvisti di termistori.
Sorgente DAC 1
RW
Ú
da 0 a 1999
Ö
Uni
+201, uscita rampa
Seleziona la sorgente dell'uscita analogica 1 mediante il terminale
TB2-12.
Sorgente DAC 2
RW
Ú
da 0 a 1999
Ö
Uni
+302, retroazione
velocità
Seleziona la sorgente dell'uscita analogica 2 mediante il terminale
TB2-13.
07.10
Ö
RO
V
Bi
Visualizza il valore del segnale analogico applicato al terminale TB1-06.
Può essere utilizzato come ingresso per uso generale per il
monitoraggio, oppure per applicazioni speciali del Processore 2.
07.04
Ö
RO
07.09
Ö
Uni
Controlla il valore della tensione applicata ai terminali d'ingresso della
linea L1, L2, L3 (l'alimentazione dello stack di tiristori (SCR)).
07.08
Visualizza il valore del segnale analogico applicato al terminale TB1-04.
Può essere utilizzato come ingresso per uso generale per il
monitoraggio, oppure per applicazioni speciali del Processore 2.
Ö
Visualizza il valore della richiesta di velocità analogica sul terminale
TB1-03, oppure del riferimento dell'encoder (tach. a impulsi) del master
mediante PL4 e dopo la scalatura da parte di 07.24; dipende dal modo di
riferimento selezionato da 07.25.
Infine, tre uscite analogiche, tramite convertitori digitali-analogici (DAC),
servono per parametri sorgente programmabili e per la scalatura.
07.01
Bi
Bi
Ö
Visualizza il valore del segnale analogico applicato al terminale TB1-07.
Può essere utilizzato come ingresso per uso generale per il
monitoraggio, oppure per applicazioni speciali del Processore 2.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
Sorgente DAC 3
RW
Ú
da 0 a 1999
Uni
Ö +304, tensione indotto
Seleziona la sorgente dell'uscita analogica 3 mediante il terminale
TB2-14.
NOTA
N
Dei parametri nascosti seguenti, quelli di scalatura hanno un campo di
moltiplicazione compreso fra 0,000 e 1,999.
I parametri Sorgente e Destinazione definiscono un parametro da
utilizzare come ingresso o uscita, determinando così la funzione dei
terminali di ingresso e di uscita programmabili.
63
07.11
RW
Ú
Imposta la scalatura del segnale dalla sorgente GP2 mediante il
terminale TB1-05.
Destinazione GP1
da 0 a 1999
07.17
Fattore di scalatura = --------------1000
Uni
Ö +318, rif. velocità reale
Seleziona la destinazione dell'ingresso analogico 1 mediante il terminale
TB1-04.
Un valore modificato diventa efficace solo dopo avere premuto il
pulsante di RESET.
07.12
Ú
da 0 a 1999
Ö
Uni
+408, rif. coppia
Ú
da 0 a 1999
Ö
Ú
da 0 a 1999
Ö
Ú
da 0 a 1999
Ö
da 0 a 1999
07.20
Scalatura riferimento di velocità
Ú
da 0 a 1999
07.21
Ö
Ö
+1000
Scalatura DAC 1
RW
Ú
da 0 a 1999
Uni
Ö
+1000
07.21
Fattore di scalatura = --------------1000
+117, rif. velocità 1
07.22
Scalatura DAC 2
RW
Ú
Uni
da 0 a 1999
Ö
Scalatura DAC 3
RW
Ú
+1000
+1000
07.22
Fattore di scalatura = --------------1000
07.23
Uni
Uni
Imposta la scalatura dell'uscita dei segnali dal terminale TB2-13 del
convertitore DAC2.
+1000
Scalatura GP2
da 0 a 1999
Uni
Imposta la scalatura dell'uscita dei segnali dal terminale TB2-12 del
convertitore DAC1.
07.16
Fattore di scalatura = --------------1000
Ú
+1000
07.20
Fattore di scalatura = --------------1000
Uni
Ö
RW
Uni
Ö
RW
Imposta la scalatura del segnale dalla sorgente GP1 mediante il
terminale TB1-04.
07.17
da 0 a 1999
Scalatura GP1
RW
Ú
Ú
+120, rif. velocità 4
Seleziona la destinazione del riferimento di velocità 07.05.
Un valore modificato diventa efficace solo dopo avere premuto il
pulsante di RESET.
07.16
Scalatura GP4
Fattore per il quale viene moltiplicato 07.05 al fine di produrre il
riferimento di velocità.
Uni
Destinazione riferimento di velocità
RW
+1000
+119, rif. velocità 3
Seleziona la destinazione dell'ingresso analogico 4 mediante il terminale
TB1-07.
Un valore modificato diventa efficace solo dopo avere premuto il
pulsante di RESET.
07.15
Ö
07.19
Fattore di scalatura = --------------1000
Destinazione GP4
RW
da 0 a 1999
RW
Uni
Seleziona la destinazione dell'ingresso analogico 3 mediante il terminale
TB1-06.
Un valore modificato diventa efficace solo dopo avere premuto il
pulsante di RESET.
07.14
Ú
Uni
Imposta la scalatura del segnale dalla sorgente GP4 mediante il
terminale TB1-07.
Destinazione GP3
RW
RW
07.19
Seleziona la destinazione dell'ingresso analogico 2 mediante il terminale
TB1-05.
Un valore modificato diventa efficace solo dopo avere premuto il
pulsante di RESET.
07.13
Scalatura GP3
Imposta la scalatura del segnale dalla sorgente GP3 mediante il
07.18
terminale TB1-06. Fattore di scalatura = --------------1000
Destinazione GP2
RW
07.18
da 0 a 1999
Ö
Uni
+1000
Imposta la scalatura dell'uscita dei segnali dal terminale TB2-14 del
convertitore DAC3.
07.23
Fattore di scalatura = --------------1000
64
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
07.24
Scalatura encoder di riferimento
RW
Ú
da 0 a 1999
07.29
Inversione ingressi analogici GP3 e GP4
Uni
Ö
RW
Ú
+419
Imposta la scalatura per i segnali provenienti dall'encoder del riferimento
(tachimetro a impulsi) collegato alla presa terminali PL4. Il valore deve
essere impostato in modo da corrispondere alla velocità massima del
motore e al numero di impulsi per giro dell'encoder.
Per calcolare il fattore di scala:
0o1
Ö
Bit
0
Quando questo parametro è impostato a 1, la polarità degli ingressi
analogici GP3 e GP4 viene invertita.
I valori di 07.03 e di 07.04 non vengono influenzati e indicano la polarità
della tensione applicata ai terminali TB6 e TB7.
6
750 × ( 10 )
Fattore di scalatura = -----------------------------N×n
Dove:
N = numero di impulsi per giro
n = velocità max del motore in giri/min.
Il valore di default viene determinato sulla base di un encoder a 1024
fronti (tachimetro a impulsi) e di una velocità massima di 1750 giri/min.
La frequenza massima dell'encoder è di 105 kHz.
07.25
Selettore riferimento encoder
RW
Ú
0o1
Bit
Ö 0, rif. analogico selez.
0 = riferimento analogico selezionato.
1 = encoder (tachimetro a impulsi) selezionato.
Seleziona il segnale analogico sul terminale TB1-03 o l'ingresso
dell'encoder (tachimetro a impulsi) tramite PL4 come sorgente del
segnale di riferimento velocità.
07.26
Selettore ingresso di corrente
RW
Ú
0o1
Bit
Ö 0, ingr. tensione selez.
Configura il terminale dell'ingresso di velocità (TB1-03) per accettare
una tensione o un segnale di ingresso di 20 mA.
07.27
Selettore ingresso modo di corrente
RW
Ú
0o1
Bit
Ö
0
In combinazione con 07.28, configura l'ingresso di 20 mA dell'anello di
corrente.
Ingresso
07.27
07.28
0-20 mA
0
0
20-0mA
1
0
4-20 mA
0
1
20-4 mA
1
1
07.28
Selettore ingresso modo di corrente
RW
Ú
0o1
Ö
Bit
1
In combinazione con 07.27, configura l'ingresso di 20 mA dell'anello di
corrente.
Quando si utilizza un offset di 4 mA, il convertitore va in allarme se rileva
che la corrente è <3,5 mA indicando l'anello aperto.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
65
8.6.8
Menu 08: Ingressi digitali
08.05
08.01
RO
Ú
0o1
RO
Bit
Ú
Ö
0 = arresto convertitore
1 = avviamento abilitato
Esegue il monitoraggio dell'ingresso di controllo del consenso
avviamento del convertitore dal terminale TB3-21 e indica lo stato.
Questo ingresso esegue una funzione di esclusione nel modo di
controllo della velocità consistente nell'arresto del convertitore,
come segue.
L'ingresso deve essere attivo per consentire l'avviamento del
convertitore.
Se l'ingresso diventa inattivo, 08.01 determina l'impostazione a zero del
riferimento pre-rampa 01.03.
Il convertitore si arresta, a meno che 02.03, mantenimento rampa, sia
attivo.
08.02
0o1
Bit
Ö
Ingresso F3 jog avanti
RO
Ú
0o1
RO
Ú
Bit
Ö
0o1
Ingresso F7
RO
Ú
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-27 e
indica lo stato.
Ú
Ingresso F8
Ö
0o1
Ingresso F9
RO
Bit
Ú
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-24 e
indica lo stato. Il convertitore risponde a questo ingresso come a un
comando di marcia inversa solo se i comandi logici esterni sono abilitati
(08.21 = 0). Inoltre, il suo funzionamento è liberamente programmabile.
Questo è un ingresso ad autotenuta e il parametro 01.11 non commuterà
su 0 se l'ingresso viene rimosso, a condizione che 08.21 = 0.
Bit
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-28 e
indica lo stato.
08.09
Ö
Bit
Ö
0o1
RO
Ingresso F4 marcia inversa
0o1
Ingresso F6
Ö
RO
Ú
08.06
08.08
Bit
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-23 e
indica lo stato. Il convertitore risponde a questo ingresso come a un
comando di jog avanti solo se i comandi logici esterni sono abilitati
(08.21 = 0). Inoltre, il suo funzionamento è liberamente programmabile.
08.04
Ö
0o1
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-25 e
indica lo stato. Il convertitore risponde a questo ingresso come a un
comando di marcia avanti solo se i comandi logici esterni sono abilitati
(08.21 = 0). Inoltre, il suo funzionamento è liberamente programmabile.
Questo è un ingresso ad autotenuta e il parametro 01.11 non commuterà
su 0 se l'ingresso viene rimosso, a condizione che 08.21 = 0.
08.07
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-22 e
indica lo stato. Il convertitore risponde a questo ingresso come a un
comando di inversione del jog solo se i comandi logici esterni sono
abilitati (08.21 = 0). Inoltre, il suo funzionamento è liberamente
programmabile.
08.03
Bit
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-26 e
indica lo stato.
Ingresso F2 jog inverso
RO
Ú
Ingresso F5 marcia avanti
Ingresso F1 consenso marcia
Bit
Ö
0o1
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-29 e
indica lo stato.
08.10
Ingresso F10
RO
Ú
0o1
Bit
Ö
0 = ingresso non attivo
1 = ingresso attivo
Esegue il monitoraggio dell'ingresso di controllo dal terminale TB3-30 e
indica lo stato.
66
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
08.11
Abilitazione ingresso
RO
Ú
0o1
08.17
Bit
RW
Ö
Ú
0 = disabilitazione
1 = abilitazione
Esegue il monitoraggio dell'ingresso di abilitazione convertitore dal
terminale TB4-31 e indica lo stato. Affinché il convertitore funzioni,
l'ingresso deve essere attivo. Quando il convertitore viene disabilitato
mediante la disattivazione dell'ingresso, tutti gli impulsi d'innesco
vengono disinseriti dopo un ritardo di 30 ms. Se ciò si verifica quando il
convertitore è in funzione, si produce un arresto per inerzia e un reset
delle rampe.
08.12
Ú
da 0 a 1999
Uni
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-22.
Ha effetto solo dopo un RESET.
08.13
Ú
da 0 a 1999
Uni
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-23.
Ha effetto solo dopo un RESET.
08.14
Ú
da 0 a 1999
Uni
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-24.
Ha effetto solo dopo un RESET.
08.15
Destinazione F5
RW
Ú
da 0 a 1999
Uni
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-25.
Ha effetto solo dopo un RESET.
08.16
Destinazione F6
RW
Ú
da 0 a 1999
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-27.
Ha effetto solo dopo un RESET.
08.18
Destinazione F8
RW
Ú
da 0 a 1999
Uni
Ö
+000
08.19
Destinazione F9
RW
Ú
da 0 a 1999
Uni
Ö
+000
08.20
Destinazione F10
RW
Ú
da 0 a 1999
Uni
Ö
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-30.
Ha effetto solo dopo un RESET.
Destinazione F4
RW
Ö
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-29.
Ha effetto solo dopo un RESET.
Destinazione F3
RW
da 0 a 1999
Uni
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-28.
Ha effetto solo dopo un RESET.
Destinazione F2
RW
Destinazione F7
Uni
+000
Definisce la destinazione dell'ingresso logico esterno sul terminale
TB3-26.
Ha effetto solo dopo un RESET.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
08.21
Disabilitazione funzioni logiche normali
RW
Ú
0o1
Ö
Bit
0
0 = abilitazione funzione logica normale
1 = disabilitazione funzione logica normale
Default 0
Se è impostato su abilitazione (= 0), questo parametro configura gli
ingressi logici nel modo seguente:
F2
TB3-22
Jog inverso
F3
TB3-23
Jog avanti
F4
TB3-24
Marcia inversa
F5
TB3-25
Marcia avanti
Se il parametro è impostato su disabilitazione (=1), gli ingressi logici
devono essere programmati dall'utente. Un ingresso programmabile può
essere utilizzato per controllare il parametro 1.11 (Riferimento
ATTIVATO) solo in presenza di un segnale di CONSENSO MARCIA.
Vedere inoltre i parametri da 08.31 a 08.34.
Le comunicazioni seriali possono essere utilizzate per controllare il
convertitore quando le funzioni logiche normali sono disabilitate
mediante l'immissione di valori nei parametri 1.11, 1.12 e 1.13.
67
08.22
Inversione ingresso F2
08.23
Inversione ingresso F3
08.24
Inversione ingresso F4
08.25
Inversione ingresso F5
08.26
Inversione ingresso F6
08.27
Inversione ingresso F7
08.28
Inversione ingresso F8
08.29
Inversione ingresso F9
08.30
Inversione ingresso F10
RW
Ú
0o1
08.34
Abilitazione marcia avanti
RW
Ú
0o1
Ö
Bit
0
0 = non abilita
1 = abilita Marcia avanti
Quando 08.21 = 1, funzioni logiche normali disabilitate, 08.34 può
abilitare Marcia avanti
Bit
Ö
0
0 = non inverte
1 = inverte la funzione logica
08.31
Abilitazione jog inverso
RW
Ú
0o1
Bit
Ö
0
0 = non abilita
1 = abilita Jog inverso
Quando 08.21 = 1, funzioni logiche normali disabilitate, 08.31 può
abilitare Jog inverso
08.32
Abilitazione jog avanti
RW
Ú
0o1
Bit
Ö
0
0 = non abilita
1 = abilita Jog avanti
Quando 08.21 = 1, funzioni logiche normali disabilitate, 08.32 può
abilitare Jog avanti
08.33
Abilitazione marcia inversa
RW
Ú
0o1
Ö
Bit
0
0 = non abilita
1 = abilita Marcia inversa
Quando 08.21 = 1, funzioni logiche normali disabilitate, 08.33 può
abilitare Marcia inversa
68
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.9
Menu 09: Uscite di stato
I parametri delle uscite di stato definiscono un parametro da utilizzare
come sorgente, determinando così la funzione dei terminali di uscita
programmabili.
Il Menu 09 contiene tre gruppi di sorgenti di stato, ciascuno dei quali può
essere invertito. Le due sorgenti ST1 e ST2 possono essere configurate
in qualsiasi combinazione utile per l'uscita sui terminali TB2-15 e
TB2-16. Il secondo gruppo seleziona dalle sorgenti ST3, ST4, ST5 per
l'uscita rispettivamente sui terminali TB2-17, TB2-18, TB2-19, oppure la
sorgente ST6 (uscita relè).
I ritardi 09.12 e 09.18 si applicano alle uscite di stato ST1 e ST2 nei
passaggi 0 -> 1.
09.12
Ritardo stato 1
RW
Ú
09.13
da 0 a 255
Ö
0
Sec
Sorgente 1 stato 2
RW
Ú
Uni
da 0 a 1999
Uni
Ö
+1007
Nei passaggi 1 -> 0, l'effetto è immediato, senza ritardo.
09.14
09.01
Uscita stato 1
09.02
Uscita stato 2
09.03
Uscita stato 3
09.04
Uscita stato 4
09.05
Uscita stato 5
09.06
Uscita stato 6 (relè)
RW
Ú
09.15
RO
09.07
0o1
09.08
da 0 a 1999
09.09
09.10
09.11
Bit
09.18
Uni
09.19
Bit
Ö
09.20
0o1
Ö
0o1
Bit
09.21
da 0 a 255
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
0
Uni
Ö
0
Sec
Sorgente stato 3
da 0 a 1999
Uni
Ö
+1013
Inversione uscita stato 3
0o1
Bit
Ö
0
Sorgente stato 4
+000
RW
Ú
Bit
Ö
RW
Ú
0
Ritardo stato 2
+000
Invesione uscita stato 1
Bit
Ö
RW
Ú
000
Inversione uscita stato 2
000
Inversione sorgente 2 stato 1
0o1
0o1
RW
Ú
Uni
Ö
RW
Ú
0
Inversione sorgente 2 stato 2
0
Ö
RW
Ú
09.17
Sorgente 2 stato 1
da 0 a 1999
da 0 a 1999
+111
Ö
RW
Ú
Uni
Ö
RW
Ú
Ú
Inversione sorgente 1 stato 1
0o1
Ö
RW
Sorgente 1 stato 1
RW
Ú
09.16
Bit
Bit
Sorgente 2 stato 2
Ö
RW
Ú
0o1
RW
Ú
Ú
Inversione sorgente 1 stato 2
da 0 a 1999
Ö
Uni
+1003
69
09.22
Inversione uscita stato 4
RW
Ú
09.23
0o1
Ö
09.24
da 0 a 1999
09.25
09.26
0o1
Bit
Ö
0
Sorgente stato 6 (relè)
da 0 a 1999
Uni
Ö
+1009
Inversione uscita stato 6
RW
Ú
+1006
Inversione uscita stato 5
RW
Ú
Uni
Ö
RW
Ú
0
Sorgente stato 5
RW
Ú
Bit
0o1
Ö
Bit
0
70
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.10
Menu 10: Logica di stato e informazioni
diagnostiche
Tutti i parametri RO reali (non bit) sono congelati al momento
dell'allarme per facilitare la diagnosi dell'anomalia. Essi rimangono in
questa condizione fino al reset del convertitore.
10.01
Ú
0o1
Ú
0 = Convertitore fermo o in marcia inversa
1 = Convertitore in marcia avanti al di sopra
La direzione di funzionamento in avanti è definita come segue:
Quando si seleziona la retroazione del tachimetro, il terminale
TB1-09 è negativo rispetto al terminale TB1-10.
Quando si seleziona la retroazione della tensione d'indotto,
il terminale A1 è positivo rispetto al terminale A2.
Quando si seleziona la retroazione dell'encoder (tachimetro a
impulsi), il canale A precede
il canale B.
Velocità inversa
RO
Ú
0o1
Indica che il ponte 1 a tiristori (SCR) (il ponte positivo o di funzionamento
avanti) è in fase di innesco. Non indica necessariamente che il ponte è
in conduzione, poiché la conduzione dipende dall'angolo d'innesco e
dalle condizioni di funzionamento.
10.05
Ú
Quando si seleziona la retroazione della tensione d'indotto,
il terminale A1 è negativo rispetto al terminale A2.
Quando si seleziona la retroazione dell'encoder (tachimetro a
impulsi), il canale A è in ritardo sul
canale B.
N
Se 10.01 = 10.02 = 0, il motore è fermo o in marcia al di sotto <della
soglia di velocità zero. In questa condizione, 10.09 = 1 e il LED di
Velocità zero sul tastierino si accende (e RL2 viene attivato, se
programmato per l'indicazione della velocità zero).
Ú
Limite di corrente
0o1
0o1
Bit
Ö
0 = disabilitato
1 = abilitato
Indica che il ponte 2 a tiristori (SCR) (il ponte negativo o di
funzionamento inverso) è in fase di innesco. Non indica
necessariamente che il ponte è in conduzione, poiché questa dipende
dall'angolo d'innesco e dalle condizioni di funzionamento.
10.06
Ö
RO
Ponte 2 abilitato
RO
Bit
Ö
0 = Convertitore non in limite di corrente
1 = Convertitore in limite di corrente
Indica che la somma della richiesta di corrente 04.01 e dell'offset 04.09 è
limitata dall'esclusione del limite di corrente 04.03 o da uno dei limiti dei
ponti.
Retrofasatura elettrica
RO
Ú
La direzione di funzionamento inversa è definita come segue:
Quando si seleziona la retroazione del tachimetro, il terminale
TB1-09 è positivo rispetto al terminale TB1-10.
10.03
Ö
Bit
0 = Convertitore fermo o in marcia avanti
1 = Convertitore in marcia inversa al di sopra della
NOTA
0o1
Bit
0 = disabilitato
1 = abilitato
Bit
Ö
Ponte 1 abilitato
RO
Velocità avanti
RO
10.02
10.04
0o1
Bit
Ö
0 = impulsi d'innesco non retrofasati
1 = impulsi d'innesco retrofasati (motore fermo)
Indica che gli impulsi d'innesco sono retrofasati dall'azione della
funzione di motore fermo. Vedere i parametri 05.18 e 05.19.
10.07
In velocità
RO
Ú
0o1
Bit
Ö
0 = Convertitore non in velocità
1 = Convertitore in velocità
Indica che il convertitore ha raggiunto la velocità impostata, che il
riferimento post-rampa 02.01 = riferimento pre-rampa 01.03 e anche che
il confronto della richiesta di velocità finale 03.01 con la retroazione della
velocità 03.02 determina un errore di velocità pari all'<1,5% della
velocità massima. Il segnale esterno è inoltre fornito attraverso l'uscita a
collettore aperto ST2 al terminale TB2-16, se il parametro sorgente
09.13 è impostato al valore di default.
10.08
Velocità eccessiva
RO
Ú
0o1
Bit
Ö
0 = motore non a una velocità eccessiva
1 = motore a una velocità eccessiva
Indica che la retroazione della velocità 03.02 > 1000, cioè che la velocità
è fuori campo e ciò suggerisce che il motore è trascinato
meccanicamente a una velocità superiore a quella massima del
convertitore. Questa funzione ha unicamente finalità di monitoraggio e
non attiva pertanto un segnale di allarme.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
71
10.09
Velocità zero
10.14
RO
Ú
Bit
RO
Ö
0o1
Ú
Questo parametro è impostato se la retroazione della velocità 03.02 <
soglia di velocità zero 03.23. Vedere i parametri 10.01 e 10.02
Protezione attiva della tensione d'indotto
RO
Ú
Bit
10.15
Perdita di retroazione
RO
0 = protezione non attiva
1 = protezione attiva
Ú
Questo parametro è impostato quando la protezione della tensione
d'indotto è attiva. Impedisce che la tensione aumenti ulteriormente.
Vedere il parametro 03.15.
Rotazione delle fasi
RO
Ú
Bit
Ö
0o1
0 = L1 L3 L2
1 = L1 L2 L3
0o1
Perdita di alimentazione o di fase
RO
Il collegamento a E1 e a E3 deve inoltre essere corretto - vedere la
Figura 6-2 e la Figura 6-3.
10.12
Stato del convertitore (normale)
RO
Ú
Ú
0o1
10.17
Allarme (I x t)
Allarme istantaneo
Ú
0o1
RO
Ú
RO
Ö
0 = in ordine (normale)
1 = perdita di alimentazione/fase
1 = Il convertitore è acceso e non è andato in allarme.
10.13
Bit
Indica la perdita di una o più fasi di ingresso collegate a L1, L2, L3.
Può essere disabilitato attraverso 10.31.
Bit
Ö
0o1
Ö
Indica la mancanza del segnale di retroazione o la polarità invertita.
Si applica ugualmente alla retroazione del generatore tachimetrico
(tachimetro) e dell'encoder (tachimetro a impulsi), a seconda di quale
delle due è stata selezionata. La perdita della retroazione non è rilevata
finché l'angolo d'innesco non è stato anticipato al punto in cui il valore di
05.03 (angolo d'innesco) >767. Si può impedire che questa condizione
mandi in allarme il convertitore mediante la disabilitazione del
rilevamento della perdita di retroazione 10.30.
10.16
N
Bit
0 = retroazione della velocità presente
1 = retroazione della velocità assente o polarità invertita
La rotazione è rilevata da L1, L2, L3.
NOTA
Ö
Indica che non viene assorbita corrente dall'alimentazione di campo
interna (o dal controller opzionale esterno di campo FXM5, se installato).
L'allarme per perdita di campo non viene attivato quando è selezionato il
controllo diretto dell'angolo d'innesco (6.19).
Ö
0o1
10.11
0o1
Bit
0 = campo in ordine (normale)
1 = mancanza del campo
0 = velocità non a zero
1 = velocità zero
10.10
Perdita di campo
0o1
Bit
Ö
0 = nessun picco di sovracorrente rilevato
1 = picco di sovracorrente rilevato
Bit
Ö
0 = nessuna condizione di allarme presente
1 = condizione di allarme presente, è imminente un allarme
prolungato per sovraccarico
Indica che si è verificato un picco di corrente >2 x (corrente massima in
base al resistore di carico installato). Il risultato è che gli impulsi
d'innesco vengono immediatamente soppressi, con conseguente
arresto del convertitore.
Indica che il convertitore si trova in una condizione di sovraccarico e che
andrà infine in allarme per un sovraccarico prolungato 10.18 se tale
condizione non viene eliminata.
Il tempo necessario al convertitore per andare in allarme dipende dalle
impostazioni di 05.06 e di 05.07 e dall'entità del sovraccarico.
La segnalazione visiva che l'allarme è stato attivato è fornita dal LED
Allarme (lampeggiante). Il segnale esterno è inoltre fornito attraverso
l'uscita logica di stato ST3 al terminale TB2-17, a condizione che il
parametro sorgente 09.19 sia al suo valore di default.
72
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
10.18
Sovraccarico prolungato
RO
Ú
RO
Ú
Indica che la retroazione della corrente 05.01 ha superato la soglia di
sovraccarico 05.06 per un intervallo di tempo determinato dai valori del
tempo di sovraccarico 05.07 e 05.08 integrati con l'entità del
sovraccarico (la funzione tradizionale I x t).
Quando la corrente supera la soglia di sovraccarico, il valore in eccesso
si integra con il tempo determinando l'aumento del valore del
sovraccarico effettivo 05.11.
Per contro, se la corrente scende al di sotto della soglia durante
l'integrazione, il valore di 05.11 diminuisce verso zero. La velocità di
integrazione è determinata da 05.07 quando la corrente è > soglia e da
05.08 quando la corrente è < soglia. La velocità di integrazione è il
tempo di allarme con il sovraccarico a fondo scala (05.01 = 1000).
Questa funzione imita il comportamento di un relè termico e simula la
caratteristica termica di un motore.
Sistema di sorveglianza processore 1
RO
Ú
RO
Ö
Ú
0o1
Bit
Ö
0 = anello di velocità non saturo
1 = anello di velocità saturo
Indica che l'uscita dell'algoritmo dell'anello di velocità, dal quale è
derivata la richiesta di corrente 04.01, è a un limite. Ciò può essere
dovuto all'applicazione di un limite di corrente o di una protezione di
corrente zero e può verificarsi se il motore viene fermato
meccanicamente.
Richiesta di corrente a zero
0o1
Bit
Ö
0 = richiesta di corrente > 0
1 = richiesta di corrente = 0
Indica che il segnale di richiesta di corrente viene limitato a zero.
Ciò potrebbe verificarsi, per esempio, a seguito di una perdita repentina
di carico, in quanto il convertitore è nel modo di controllo di coppia con
l'esclusione della velocità. La velocità potrebbe di conseguenza
raggiungere la soglia impostata, facendo sì che l'anello di velocità riduca
la richiesta di corrente a zero.
10.25
Ultimo allarme
RO
Ú
Sovratemperatura motore
0o1
RO
da 0 a 255
Uni
Ö
Registrazione del codice dell'ultimo allarme, che va a formare la base di
uno storico degli allarmi.
RO
Ú
Anello di velocità saturo
Bit
0 = in ordine (normale)
1 = allarme
10.21
10.23
Ú
Sistema di sorveglianza processore 2
0o1
>100oC (sui convertitori provvisti di un termistore per il dissipatore con
stack di tiristori (SCR)).
RO
In condizioni di funzionamento normali del convertitore, il temporizzatore
del sistema di sorveglianza viene resettato periodicamente dal
Processore 1 come controllo che il processore e il programma del
convertitore funzionano correttamente. Se un reset non si verifica prima
della conclusione dell'intervallo previsto del temporizzatore, si deduce
che vi è un'anomalia nel processore o che il programma del convertitore
è andato in crash. Il risultato è l'immediato arresto controllato del
convertitore, accompagnato da un segnale di allarme per anomalia
emesso dal sistema di sorveglianza.
Ú
10.22 = 1 indica la sovratemperatura dello stack di tiristori (SCR),
10.24
0 = in ordine (normale)
1 = allarme
10.20
Ö
0o1
Bit
Ö
0o1
Bit
0 = in ordine (normale)
1 = allarme
0 = sovraccarico prolungato non rilevato
1 = sovraccarico prolungato rilevato
10.19
Sovratemperatura dissipatore di calore
Bit
Ö
0o1
10.22
10.26
Penultimo allarme (10.25)
Bit
Ö
0 = in ordine (normale)
1 = allarme
10.21 = 1 indica l'allarme rilevato sul terminale d'ingresso del termistore
per il motore.
livello di allarme 3 kΩ
livello di reset del rilevatore 1,8 kΩ
RO
Ú
da 0 a 255
Uni
Ö
Registrazione dell'allarme precedente a quello salvato in 10.25.
10.27
Allarme precedente 10.26
RO
Ú
da 0 a 255
Uni
Ö
Registrazione dell'allarme precedente a quello salvato in 10.26.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
73
10.28
Allarme precedente 10.27
RO
Ú
da 0 a 255
Uni
RW
Ö
Registrazione dell'allarme precedente a quello salvato in 10.27.
I quattro parametri da 10.25 a 10.28 forniscono una memoria
permanente degli ultimi quattro allarmi. Essi vengono aggiornati
unicamente dal verificarsi di un nuovo allarme.
10.29
Disabilitazione allarme per perdita di
campo
RW
Ú
0o1
Bit
Ö
Ú
0
Bit
Ö
0
0 = perdita della retroazione abilitata
Disabilitazione allarme per perdita di alim.
o fase
RW
Ú
0o1
Bit
Ö
Impedisce che il convertitore vada in allarme quando il sensore di
temperatura del dissipatore di calore rileva una temperatura superiore a
100oC, per esempio quando la protezione contro la sovratemperatura
del dissipatore a tiristori (SCR) viene utilizzata nel modo di allarme,
oppure per ottenere un normale arresto del sistema.
N
10.34
Allarme esterno
RW
Ú
0o1
Disabilitazione allarme per
sovratemperatura motore
0o1
Ö
0
Allarme processore 2
RW
Ú
da 0 a 255
Uni
Ö
0
Se il convertitore è in ordine (normale), il display dei dati visualizza 0 per
il parametro 10.35. Il valore di 10.35 viene controllato continuamente dal
processore. Il convertitore va immediatamente in allarme se attraverso
l'interfaccia delle comunicazioni seriali o il software del Processore 2
compare un valore diverso da zero (eccetto il 255).
10.36
Disabilitazione allarme per perdita anello
di corrente
RW
Ú
Ú
Ö
Se 10.35 = 255, ciò equivale a un RESET.
0
Impedisce che il convertitore vada in allarme al rilevamento della perdita
dell'alimentazione o della fase di alimentazione, consentendo così al
convertitore di non essere influenzato da brevi interruzioni
dell'alimentazione.
RW
Bit
Se 10.34 = 1, il convertitore andrà in allarme. Qualora occorre un
allarme esterno, l'utente può programmare qualsiasi ingresso logico per
controllare questo bit (vedere il menu Menu 08). In alternativa,
può essere controllato da un applicativo software o attraverso
l'interfaccia seriale.
0 = perdita di alimentazione/fase abilitata
10.32
0
0 = allarme per sovratemperatura dissipatore abilitato
10.35
Impedisce che il convertitore vada in allarme quando è rilevata la perdita
della retroazione della velocità, per esempio in alcune applicazioni con
suddivisione del carico e in applicazioni che non comprendono motori,
come la ricarica di batterie e altri processi elettrolitici.
10.31
Ö
Dal modello M25-M105, il parametro viene impostato in fabbrica su 1.
Disabilitazione allarme per perdita della
retroazione
0o1
0o1
NOTA
Impedisce che il convertitore vada in allarme al rilevamento della perdita
di campo, per esempio, in applicazioni in cui l'alimentazione di campo
interna non viene utilizzata o viene disattivata quando il convertitore non
è in funzione.
RW
Ú
Bit
Questo parametro è impostato per default su 1 nei convertitori con
versione del software precedente alla V5.
0 = allarme per perdita di campo abilitato
10.30
Disabilitazione allarme per
sovratemperatura dissipatore
10.33
0o1
Bit
Ö
0
Quando 10.36 = 1, l'allarme che normalmente seguirebbe la perdita
dell'anello di corrente viene disabilitato.
Bit
10.37
1
Disabilitazione allarme per circuito
interrotto indotto
1 = allarme per sovratemperatura motore disabilitato
Impedisce che il convertitore vada in allarme quando l'ingresso del
sensore di temperatura motore diventa ad alta resistenza, per esempio
quando la protezione contro la sovratemperatura del motore viene
utilizzata nel modo di allarme, oppure per raggiungere un arresto
normale di linea.
RW
Ú
0o1
Ö
Bit
0
Quando questo parametro è impostato, l'allarme per circuito interrotto
dell'indotto (AOP) viene disabilitato.
74
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.11
Menu 11: Varie
N
NOTA
Alcuni parametri del Menu 11 cambiano a seconda di quale modulo
opzionale è montato. Per i particolari, vedere:
•
•
•
sezione 8.6.16 Impostazione dell'MD24-PROFIBUS-DP a pagina 84
sezione 8.6.17 Impostazione dell'MD25-DeviceNet a pagina 85
sezione 8.6.18 Impostazione dell'MD-IBS (INTERBUS) a pagina 86
Menu definito dall'utente
I parametri dall'11.01 fino all'11.10 determinano i parametri nel Menu 00
definito dall'utente. Per esempio, se l'utente desidera che il parametro
00.01 visualizzi la velocità in giri/min. (03.03), il parametro 11.01
(corrispondente a 00.01) deve essere impostato a 303.
I parametri dall'11.09 fino all'11.10 sono condivisi e hanno funzioni
associate alla scheda di circuiti stampati MD29. Vedere la Guida MD20
dell'utente.
Nel Modo 4, il convertitore genera l'uscita del valore intero esteso 15.63
verso le linee di trasmissione e colloca ogni dato ricevuto in 15.62.
Questo consente a un riferimento digitale di essere trasmesso a una
linea di convertitori e rende possibile l'impostazione di rapporti in ogni
fase. I dati devono essere trasferiti da 15.62 a 15.63 tramite un
programma MD29. Se un Numero intero esteso viene letto da un
collegamento per le comunicazioni seriali (interfaccia), i dati sono inviati
sotto forma di cinque caratteri ASCII senza segno. (L'intera serie di
parametri può essere scritta mediante cinque caratteri ASCII finché non
si include il segno). I dati sono trasferiti mediante il modo 4 alla velocità
di 3 x frequenza alimentazione di rete in c.a.
Prima che il valore abbia effetto, occorre resettare il convertitore.
11.14
Riservato
RW
Ú
11.11
Indirizzo seriale
RW
Ú
Questo parametro è riservato.
Uni
Ö
da 0 a 99
11.15
RO
Velocità di trasm. in baud
RW
Ú
Impostazione
4800
0
9600
1
Ú
Ú
Versione software processore 2
da 0 a 1000
Ö
Codice di sicurezza livello 3
001
Definisce il modo di funzionamento della porta seriale.
Vi sono quattro modi. Immettere il numero di impostazione appropriato
al modo richiesto, come mostrato sotto:
Modo
da 0 a 255
11.18
Ö
149
Parametro di avviamento
Impostazione
Protocollo ANSI
1
Variabile di uscita definita da 11.19
2
Variabile di ingresso nel parametro definita da 11.19
3
Driver valore intero esteso (a 16 bit)
4
Il Modo 1 è per la comunicazione fra il convertitore e un altro dispositivo
seriale (terminale, PLC, computer).
Le impostazioni di Modo 2 e 3 servono per il trasferimento rapido delle
informazioni fra due convertitori, in modo da rendere inutile il passaggio
di segnali analogici fra di loro. Per esempio, le impostazioni di modo 2 e
3 potrebbero essere impiegate in un'applicazione di condivisione del
carico per l'uscita della richiesta di corrente da un convertitore nel Modo
2 e per l'ingresso di una richiesta di corrente verso un altro nel Modo 3.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
Ú
Uni
Se questo parametro viene modificato (con un valore qualsiasi diverso
da 0 e da 149) e memorizzato, il valore impostato deve essere immesso
nel parametro 0 per riportare il convertitore allo stato di consegna.
La sicurezza di Livello 1 o di Livello 2 deve quindi essere utilizzata nel
modo normale. Se 11.17 è impostato a = 0, tutti i parametri sono
liberamente accessibili in lettura-scrittura senza che occorra immettere
un codice di sicurezza. Per memorizzare i valori, impostare il Parametro
00 = 1 e premere RESET.
Uni
Ö
Uni
Riservato per l'applicativo software speciale del processore 2 (scheda di
circuiti stampati MD29).
11.17
Modo seriale
da 1 a 4
Visualizza il numero di revisione del software installato nel Processore 1.
Per esempio, la versione 4.10.0 viene visualizzata come 410 (finestra dati).
RW
RW
Uni
Ö
RO
Prima che l'impostazione abbia effetto, occorre resettare il convertitore.
11.13
da 0 a 1000
0
Nei convertitori standard, sono disponibili due velocità di trasmissione in
baud per l'interfaccia delle comunicazioni. Immettere il numero di
impostazione appropriato alla velocità di trasmissione in baud richiesta,
come mostrato sotto:
Baud
Ú
11.16
Bit
Ö
0o1
Versione software processore 1
001
Definisce l'indirizzo esclusivo di un convertitore quando più azionamenti
sono collegati a un bus seriale comune in un'applicazione multidrop.
Se questo parametro è impostato a 100, il valore viene preso come 99.
11.12
Ö
RW
Ú
da 0 a 1999
Uni
Ö
+000
Utilizzato per l'impostazione del parametro visualizzato sul tastierino
all'accensione.
11.19
Sorgente seriale programmabile
RW
Ú
da 0 a 1999
Ö
Uni
+000
Definisce un parametro di ingresso o di uscita quando si seleziona il
modo seriale 2 o 3. Vedere il parametro 11.13.
75
11.20
Scalatura seriale
RW
Ú
Uni
Ö
da 0 a 1999
+1000
Scala i dati di ingresso nel modo seriale 3. Vedere il parametro 11.13.
11.21
Byte dei LED
RW
L'ingresso analogico GP2 (vedere il Menu 07) viene impostato come
ingresso di alimentazione di rete in ordine (alimentazione in c.a.
normale) quando il parametro 11.24 = 1. Quando questo parametro
viene impostato in tale modo, se la tensione sul terminale TB1-5 (GP2)
scende al di sotto della soglia 1 V, il convertitore disabilita
immediatamente l'innesco e spegne il display per ridurre il consumo di
corrente. Quando il convertitore rileva che l'alimentazione è stata
stabilita per 40 mS, effettuerà un reset e un nuovo avviamento a
condizione che siano ancora presenti i comandi appropriati di MARCIA e
di ABILITAZIONE. Per eseguire il nuovo avviamento dopo la mancanza
della rete di alimentazione, il convertitore impiega generalmente 340 ms.
Uni
Figura 8-8
Ú
Ö
da 0 a 255
L1
Designazioni:
L2
Bit 7
Allarme
Bit 6
Velocità zero
Bit 5
Marcia avanti
Bit 4
Marcia inversa
Bit 3
Ponte 1
Bit 2
Ponte 2
L3
In velocità
Limite di corrente
NOTA
Il valore visualizzato è l'equivalente decimale dello schema bit.
Disabilitazione funzioni normali a LED
RW
0o1
22 kΩ
IN4007
GP2
Circuito esterno per ingresso
mancanza rete di alimentazione (in c.a.)
Bit 0
Ú
1 MΩ
0V
Bit 1
11.22
TB1-5
N
In presenza della versione software V4.2.0 o precedente, il relè di stato
del convertitore cambierebbe stato per indicare un'anomalia qualora il
convertitore rilevasse una mancanza della rete.
Bit
Ö
0, abilitato
Disabilita le funzioni normali degli indicatori a LED del tastierino
(a eccezione dell'indicatore Convertitore pronto) e le rende
programmabili. Impostando 11.22 = 1, le funzioni normali a LED (salvo
l'indicatore di Convertitore pronto) possono essere controllate attraverso
l'interfaccia seriale o l'applicativo software speciale del processore 2.
I LED visualizzano l'equivalente binario del valore in 11.21.
11.23
MDA6 alta tensione
RW
Ú
0o1
Bit
Ö
0
Impostazione 1 = Alta tensione MDA6 (660 V)
Se si deve utilizzare la scheda di potenza MDA6 ad alta tensione
(660 V) per un Mentor II ad alta tensione, occorre impostare questo
parametro = 1.
11.24
Arresto e ripartenza alla mancanza rete
(alim. in c.a.)
RW
Ú
0o1
Bit
Ö
0
Default 1 = Abilitazione ripartenza
NOTA
N
Al fine di massimizzare la funzione di arresto e ripartenza del Mentor II
alla mancanza della rete di alimentazione, occorre collegare il circuito
mostrato in Figura 8-8.
La versione software installata deve essere la V3.1.0 o successiva.
76
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.12
Menu 12: Soglie programmabili
12.10
12.01
RO
Ú
Isteresi soglia 2
Soglia 1 superata
RW
Bit
Ú
da 0 a 255
Ö
12.11
0 = in ordine (normale)
1 = soglia superata
Inversione uscita soglia 2
RW
Soglia 2 superata
RO
Ú
Ú
Bit
0o1
12.12
0 = in ordine (normale)
1 = soglia superata
Ö
Ú
da 0 a 1999
12.04
Uni
+000
Uni
Ö
002
Inversione uscita soglia 1
RW
Ú
+000
Isteresi soglia 1
da 0 a 255
12.06
Ö
+302
Ö
RW
Ú
da 0 a 1999
Livello soglia 1
da 0 a 1000
12.05
Ú
Uni
Uni
Ö
RW
Ú
0
Destinazione soglia 2
RW
Sorgente soglia 1
RW
Bit
0 = default
1 = segnale invertito
Ö
0o1
12.03
002
Ö
0o1
12.02
Uni
0o1
Bit
Ö
0
0 = default
1 = segnale invertito
12.07
Destinazione soglia 1
RW
Ú
12.08
da 0 a 1999
Ö
12.09
da 0 a 1999
Uni
Ö
+501
Livello soglia 2
RW
Ú
+000
Sorgente soglia 2
RW
Ú
Uni
da 0 a 1000
Ö
Uni
+000
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
77
8.6.13
Menu 13: Albero elettrico
13.08
13.01
RO
Ú
13.02
da 0 a 1023
13.03
Ú
da 0 a 1023
da 0 a 255
Ö
±1000
13.09
Bi
RW
Ö
Incremento contagiri dello slave
±1000
Limite di correzione anello di posizione
da 0 a 1000
Limita l'entità della correzione della velocità risultante da un errore di
posizione.
13.10
Ö
Errore di posizione
±1000
Ú
Bi
Abilitazione albero elettrico
Ö
da 0 a 255
Ú
Uni
Ö
da 0 a 255
0
Selettore albero elettrico rigido
Ö
0
Quando 13.11 = 1, l'errore di posizione, relativo al tempo in cui l'anello di
posizione è chiuso, è sempre assoluto. Questo significa che se l'albero
di uscita dell'unità slave viene rallentato da un sovraccarico, la posizione
è recuperata mediante un aumento automatico della velocità quando il
carico si abbassa al valore massimo o al di sotto di esso.
Quando 13.11 = 0 (default), l'Anello di posizione viene chiuso
unicamente al raggiungimento della condizione In velocità. Questo
consente l'utilizzo delle Rampe di accelerazione senza che l'albero di
uscita dell'unità slave raggiunga una velocità eccessiva.
Uni
Ö
0o1
Bit
0 = disabilitato
1 = abilitato
000
Riferimento di precisione (msb)
RW
Ú
13.11
RW
Vedere anche 13.07, 13.12 e 13.13
13.07
Ö
Abilita il software dell'Anello di posizione.
Riferimento di precisione (Isb)
RW
Ú
0o1
Bit
0 = disabilitato
1 = abilitato
Indica la differenza fra le posizioni dell'albero dell'unità master e
dell'albero dell'unità slave.
13.06
+010
Bi
RO
Ú
Uni
Ö
RW
13.05
025
Incremento contagiri del master
RO
Ú
Ö
13.08
Il guadagno applicato = --------------256
Questo parametro deve essere regolato in combinazione con i
Guadagni PID in anello di velocità 03.09, 03.10 e 03.11 al fine di
raggiungere il migliore equilibrio fra stabilità e rapidità di risposta.
Uni
Ú
13.04
Uni
Determina l'entità della correzione della velocità per unità dell'errore di
posizione. L'impostazione determina pertanto la velocità con la quale
l'anello risponde a un disturbo e quindi influisce sulla posizione
dell'albero di uscita del motore.
Contagiri encoder dello slave
RO
Ú
RW
Uni
Ö
RO
Ú
Guadagno nell'anello di posizione
Contagiri encoder del master
000
Vedere anche 13.06, 13.12 e 13.13
I parametri 13.06 e 13.07 sono utilizzati, insieme, per definire un
riferimento di velocità a 16 bit quando il parametro 13.12 = 0.
Il parametro 13.06 è la componente meno significativa.
Il parametro 13.07 è la componente più significativa.
Ogni unità di 13.07 rappresenta 256 incrementi di 13.06.
13.12
Sorgente riferimento di precisione
RW
Ú
0o1
Ö
Bit
0
1 = encoder (tach. a impulsi) unità master
0 = riferimento di precisione
Determina la sorgente del riferimento dell'anello digitale, ovvero
l'encoder (tach. a impulsi) dell'unità master (13.01) o i riferimenti di
precisione (13.06 e 13.07).
78
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
13.13
Autotenuta riferimento di precisione
RW
Ú
0o1
Bit
Ö
1
0 = utilizzo degli ultimi valori
1 = utilizzo dei valori aggiornati
I due valori di Riferimento di precisione, 13.06 e 13.07, non possono
essere modificati simultaneamente. Al fine di impedire che l'Anello di
posizione legga valori non pertinenti durante la modifica, il parametro
13.13 = 0 (default) permette a detto anello di continuare a utilizzare gli
ultimi valori durante l'esecuzione della modifica. Una volta completata
la modifica di entrambi i parametri 13.06 e 13.07, l'impostazione di
13.13 = 0 determina l'applicazione dei valori aggiornati. 13.13 deve
quindi essere resettato a 0, pronto per l'aggiornamento successivo.
13.14
Riferimento di precisione di velocità
(a 16 bit)
RW
Ú
da 000 a 65535
Ö
Uni
0
Questo parametro è un numero intero esteso equivalente al Riferimento
di precisione 13.06 e 13.07 e consente al riferimento di precisione di
essere scritto come un enunciato singolo, eliminando la necessità
dell'autotenuta, parametro 13.13.
Il parametro 13.14 è destinato principalmente a essere utilizzato
attraverso le comunicazioni seriali.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
79
8.6.14
NOTA
Menu 14: Impostazione del sistema MD29
N
Alcuni parametri del menu 14 cambiano in base al modulo opzionale
montato. Per i particolari, vedere:
•
•
•
sezione 8.6.16 Impostazione dell'MD24-PROFIBUS-DP a pagina 84
sezione 8.6.17 Impostazione dell'MD25-DeviceNet a pagina 85
sezione 8.6.18 Impostazione dell'MD-IBS (INTERBUS) a pagina 86
NOTA
N
Indirizzo seriale ANSI
RW
Ú
Ö
da 0 a 99
Ú
da 1 a 16
1
Ú
da 3 a 192
Quando è impostato a 1, questo parametro fa sì che la MD29 vada in
allarme e si arresti in caso di over-run di un Task.
Non vi è arresto controllato.
Sul display compare A29.
Int
Ö
Ú
14.09
Velocità di trasmissione in baud RS485
(Modo 1, 5, 6 e 7)
RW
48
Ú
Ú
da 1 a 200
10
Definisce il tempo del tick dal circuito di clock in millisecondi per
l'esecuzione del task CLOCK di un programma DPL.
Massimo: 100 ms.
14.05
Ú
da 0 a 255
Ú
0
Ú
0o1
Ö
Bit
Ö
0
Allarme se la scrittura in un parametro
supera il campo valori
0o1
Bit
Ö
1
Disabilitazione protocollo porta di
monitoraggio
0o1
Bit
Ö
0
L'impostazione di questo parametro a 1 mette la porta seriale RS232 nel
modo ASCII normale e disabilita tutti i protocolli delle comunicazioni per
il debugging e l'utilizzo del Toolkit MD29.
Modo autoesecuzione
RW
0o1
RW
Specifica l'indirizzo del nodo CTNet.
Disponibile unicamente con MD29AN.
14.06
Abilitazione sistema di sorveglianza
(WDOG)
Int
Ö
0
Ogni parametro del convertitore dispone di un campo finito di valori che
può essere accettato. Qualsiasi valore al di fuori dei limiti del parametro
potrebbe comportare un'anomalia del programma.
Quando questo parametro è impostato a 1, il convertitore va in allarme
se un parametro è al di fuori dei limiti. Quando è invece impostato a 0,
la MD29 pone un limite sul valore scritto.
14.11
Indirizzo del nodo CTNet
RW
Ö
RW
Ú
Int
Ö
0o1
Bit
Quando questo parametro è impostato a 1, il convertitore andrà in allarme
se si verifica un'anomalia nel software o nell'hardware della MD29.
Un programma DPL dell'utente non può provocare questo allarme.
14.10
Base dei tempi del task clock (ms)
RW
Abilitazione allarme del collegamento I/O
RW
Questo parametro imposta la velocità di trasmissione in baud:
24 = 2400, 48 = 4800, ecc.
14.04
1
Quando è impostato a 1, questo parametro fa sì che la MD29 vada in
allarme in caso di mancanza del collegamento delle comunicazioni fra
l'MD29 e la scatola I/O CT.
Int
Ö
Bit
Ö
RW
Questo parametro imposta il Modo per le comunicazioni seriali.
Tutti i modi, salvo il 7 e l'8, hanno un formato fisso:
1 bit di start, 7 bit di dati, parità pari, 1 bit di stop.
14.03
0o1
1
Modo RS485
RW
Abilitazione allarme globale in fase di
esecuzione
RW
14.08
Int
Questo parametro definisce gli indirizzi per le comunicazioni seriali.
14.02
14.07
Ú
I parametri impostati hanno effetto solo dopo il reset dell'MD29 o del
convertitore, oppure quando è stata eseguita un'istruzione RENIT in un
programma DPL.
14.01
Se invece questo parametro è impostato a zero, il software del toolkit
MD29 deve emettere un comando prima che il programma DPL venga
eseguito.
14.12
Abilitazione controller di posizione
Bit
RW
1
Ú
Se è impostato a 1, questo parametro abilita l'esecuzione automatica di
un programma DPL quando la MD29 viene resettata o accesa.
0o1
Ö
Bit
0
Quando questo parametro viene impostato a 1, la MD29 indica se si
verifica l'over-run del task Clock.
80
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
14.13
Sorgente di sincronizzazione
collegamento I/O
RW
Ú
0o1
Bit
Ö
0
Quando questo parametro viene impostato a 1, la MD29 indica se si
verifica l'over-run del task Encoder.
14.14
Selezione base dei tempi dell'encoder
RW
Ú
0o1
Bit
Ö
0
Questo parametro imposta la base dei tempi per il task ENCODER.
0 = 5 ms
1 = 2,5 ms
14.15
Riservato
RW
Ú
14.16
0o1
Ö
0
Richiesta salvataggio in memoria flash
RW
Ú
Bit
0o1
Bit
Ö
0
Impostato a 1 per salvare i registri dei parametri PLC (.PX% e -QX%)
nella memoria non volatile della MD29. Il valore del parametro ritorna
automaticamente a 0.
Per ulteriori dettagli, vedere la Guida MD29 dell'utente.
14.17
Convertitore RS232 - abilitazione
comunic. convertitore
RW
Ú
0o1
Ö
Bit
0
Quando questo parametro è impostato a 1 e le comunicazioni del Toolkit
DPL sono disabilitate, le comunicazioni seriali RS232 da convertitore a
convertitore sono abilitate.
Per ulteriori dettagli, vedere la Guida MD29 dell'utente.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
81
8.6.15
Menu 15 e 16: Menu delle applicazioni
Questi menu possono essere liberamente utilizzati da qualsiasi
programma applicativo nella MD29.
15.01
a
15.05
15.06
a
15.10
15.11
a
15.20
±1999
15.21
a
15.36
15.37
a
15.59
±1999
Ö
Variabile RW reale da 1 a 5
RW
Ú
Bi
Ö
±1999
Ö
16.11
a
16.20
Uni
Ö
Ú
da 0 a 255
Ö
16.21
a
16.36
Bit
Ö
Ú
0o1
Bit
Ö
0
0
RW reale (non salvato in NVRAM)
16.37
a
16.61
RW reale (non salvato in NVRAM)
RW
Ö
000
Variabile bit da 1 a 16
RW
da 0 a 1999
Uni
000
Variabile bit da 1 a 16
0o1
+000
Variabile RW intera da 1 a 10
RW
da 0 a 255
Bi
+000
Variabile RW intera da 1 a 10
RW
Ú
16.06
a
16.10
Variabile RW reale da 1 a 5
RW
Ú
±1999
Bi
Bi
Ö
RW
Ú
RW
Ú
RW
Ú
Variabile RO da 1 a 5
Variabile RO da 1 a 5
RO
Ú
16.01
a
16.05
Bit
Ú
0
da 0 a 1999
Ö
Bit
0
Non può essere impostato mediante il tastierino.
Non può essere impostato mediante il tastierino.
82
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Parametri speciali nel menu 15
15.60
Valore intero esteso rapporto 1
RW
Ú
Parametri speciali nel menu 16
da 0 a 65535
Ö
RO
000
Valore intero esteso rapporto 2
RW
Ú
da 0 a 65535
Ö
Uni
000
Questo parametro è l'equivalente dei parametri 15.18 e 15.19, in modo
che il Rapporto 2 nel software dell'Albero elettrico possa essere scritto
simultaneamente eliminando la necessità dell'autotenuta 15.31.
15.62
Dati di ingresso modo seriale 4
RO
Ú
da 0 a 65535
Dati di uscita modo seriale 4
RO
Ú
da 0 a 65535
Ú
da 0 a 1999
Ö
Questo parametro indica lo stato della rete CTNet.
Un valore maggiore di 0 indica un rete in ordine, con il valore che
rappresenta il numero di messaggi per secondo ricevuti dal nodo.
Il valore 0 indica una rete in ordine, ma senza trasmissione di dati.
Questo indica generalmente che non è configurato alcun nodo per la
generazione di messaggi ciclici di sincronizzazione.
Il valore di -1 indica una rete non in ordine a causa di un errore di
cablaggio, dell'assenza di resistori di terminazione, della mancanza di
altri nodi nella rete ecc.
Un valore di -2 indica la mancata inizializzazione, come un'errata
corrispondenza della velocità di trasmissione in baud o un indirizzo
illegale. Questo valore viene spesso accompagnato da un allarme
all'accensione.
16.63
Ö
Quando si seleziona il Modo seriale 4 (interfaccia), questo parametro
viene caricato con un ingresso variabile dalla porta seriale (interfaccia).
Vedere inoltre il parametro 11.13.
15.63
Parametro della diagnostica CTNet
Uni
Questo parametro è l'equivalente dei parametri 15.16 e 15.17, in modo
che il Rapporto 1 nel software dell'Albero elettrico possa essere scritto
simultaneamente eliminando la necessità dell'autotenuta 15.31.
15.61
16.62
Numero di riga DPL in cui si è verificato
l'allarme
RO
Ú
da 0 a 1999
Ö
Questo parametro viene utilizzato unicamente quando il programma
DPL è stato compilato con le informazioni di debug attivate. Il valore che
fornisce indica il numero approssimativo di righe nel programma DPL in
cui si è verificato un errore in fase di esecuzione. Se non si è verificato
alcun errore in fase di esecuzione, il valore sarà senza significato.
Ö
Quando si seleziona il Modo seriale 4 (interfaccia), questo parametro
viene trasmesso al convertitore successivo nella linea.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
83
8.6.16
NOTA
Impostazione dell'MD24-PROFIBUS-DP
N
I parametri impostati hanno effetto unicamente dopo il reset
dell'MD24-PROFIBUS-DP o del convertitore.
14.01
Indirizzo del nodo PROFIBUS-DP
RW
Ú
da 1 a 124
Int
Ö
1
Questo parametro definisce l'indirizzo del nodo che
l'MD24-PROFIBUS-DP deve utilizzare.
11.01
Mappatura canale INGRESSO 1
RW
Ú
da 101 a 1941
Int
Ö
1941
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 1. Un valore di mappatura di 1941 seleziona la parola di
stato dell'MD24-PROFIBUS-DP come parametro sorgente.
11.02
Mappatura canale INGRESSO 2
RW
Ú
da 101 a 1941
Int
Ö
302
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 2.
11.03
Mappatura canale INGRESSO 3
RW
Ú
da 101 a 1941
Int
Ö
501
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 3.
11.04
Mappatura canale USCITA 1
RW
Ú
da 101 a 1940
Int
Ö
1940
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 1. Un valore di mappatura di 1940 seleziona la parola
di controllo dell'MD24-PROFIBUS-DP come parametro di destinazione.
11.05
Mappatura canale USCITA 2
RW
Ú
101 o 1941
Bit
Ö
118
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 2.
11.06
Mappatura canale USCITA 3
RW
Ú
101 o 1941
Ö
Bit
118
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 3.
84
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
8.6.17
NOTA
Impostazione dell'MD25-DeviceNet
11.03
N
I parametri impostati hanno effetto solo dopo il reset
dell'MD25-DeviceNet o del convertitore.
14.01
Indirizzo del nodo DeviceNet
RW
Ú
da 0 a 63
Int
Ö
63
Questo parametro definisce l'indirizzo del nodo che l'MD25-DeviceNet
deve utilizzare.
14.02
Velocità trasm. dati DeviceNet
RW
Ú
da 0 a 2
Int
Ö
0
Questo parametro specifica la velocità di trasmissione dati della rete
DeviceNet.
Mappatura canale INGRESSO 3
RW
Ú
da 101 a 1940
Ö
Stato del nodo
RO
11.04
Mappatura canale USCITA 1
RW
Ú
101 o 1941
Ú
da 1 a 10
Ö
N/A
Indica lo stato operativo attuale dell'MD25-DeviceNet.
14.04
11.05
Ö
Ú
101 o 1941
da 1 a 10
Ö
118
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 2.
11.06
Ú
N/A
Bit
Ö
Mappatura canale USCITA 3
RW
Int
1940
Mappatura canale USCITA 2
Stato della rete
RW
Bit
Questo parametro specifica il parametro di destinazione per il canale
chiamato d'USCITA 1. Un valore di mappatura di 1940 seleziona la
parola di controllo dell'MD25-DeviceNet come parametro di
destinazione.
Ú
Int
501
Questo parametro specifica il parametro sorgente per il canale chiamato
d'INGRESSO 2.
RW
14.03
Int
101 o 1941
Ö
Bit
408
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 3.
Indica lo stato operativo attuale della rete DeviceNet.
14.06
Abilitazione allarme per perdita della rete
RW
Ú
da 0 a 2
Int
Ö
0
Impostato a 1 per abilitare l'allarme per perdita della rete DeviceNet.
11.01
Mappatura canale INGRESSO 1
RW
Ú
da 101 a 1941
Int
Ö
1941
Questo parametro specifica il parametro sorgente per il canale chiamato
d'INGRESSO 1. Un valore di mappatura di 1941 seleziona la parola di
stato dell'MD25-DeviceNet come parametro di destinazione.
11.02
Mappatura canale INGRESSO 2
RW
Ú
da 101 a 1941
Ö
Int
302
Questo parametro specifica il parametro sorgente per il canale chiamato
d'INGRESSO 2.
Guida Mentor ll dell'utente
Versione numero: www.controltechniques.com
85
8.6.18
NOTA
Impostazione dell'MD-IBS (INTERBUS)
11.04
N
I parametri impostati hanno effetto solo dopo il reset dell'MD-IBS o del
convertitore.
14.01
Dati sorgente di mappatura parametro
RW
Ú
0o1
Int
Ö
1
Allarme per perdita della rete INTERBUS
RW
Ú
da 0 a 100
Int
Ö
Disabilitazione dati processo di USCITA
RW
Ú
da 0 a 48
Ú
da 101 a 1940
Int
Ö
1940
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 1. Un valore di mappatura di 1940 seleziona la parola
di controllo dell'MD-IBS come parametro di destinazione.
Mappatura canale USCITA 2
RW
Ú
101 o 1941
Bit
Ö
118
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 2.
11.06
1
Specifica il ritardo temporale dell'allarme per perdita della rete in
intervalli di 20 ms. Il valore 5 corrisponde a un tempo di ritardo
dell'allarme di 100 ms.
14.03
RW
11.05
Specifica quali informazioni utilizzare per la mappatura dei dati.
0 = modo EEPROM.
1 = modo di mappatura manuale dei parametri
14.02
Mappatura canale USCITA 1
Mappatura canale USCITA 3
RW
Ú
101 o 1941
Ö
Bit
118
Questo parametro specifica il parametro di destinazione per il canale
ciclico d'USCITA 3.
Int
Ö
48
Abilita e disabilita il trasferimento dati dal controller INTERBUS del
master all'MD-IBS.
0 - abilitato
>= 1 - disabilitato.
11.01
Mappatura canale INGRESSO 1
RW
Ú
da 101 a 1941
Int
Ö
1941
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 1. Un valore di mappatura di 1941 seleziona la parola di
stato dell'MD-IBS come parametro sorgente.
11.02
Mappatura canale INGRESSO 2
RW
Ú
da 101 a 1941
Int
Ö
302
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 2.
11.03
Mappatura canale INGRESSO 3
RW
Ú
da 101 a 1941
Ö
Int
501
Questo parametro specifica il parametro sorgente per il canale ciclico
d'INGRESSO 3.
86
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
GESTIONE
RIFERIMENTO
ABILITAZIONE 31
STOP 21
JOG INVERSO 22
JOG AVANTI 23
MARCIA INVERSA 24
MARCIA AVANTI 25
01.01
RIFERIMENTO
DI VELOCITA
PRE-OFFSET
SELEZIONE
RIF.
01.03
RIFERIMENTO
DI VELOCITA
PRE-RAMPA
GESTIONE
RAMPA
RETROAZIONE
DI VELOCITÀ
GESTIONE
RIFERIMENTO
POST-RAMPA
RILEVATORE
ANOMALIE
02.01
RIFERIMENTO
DI VELOCITA
POST-RAMPA
03.02
03.01
VELOCITÀ
FINALE
RICHIESTA
AMPLIF.
VELOCITÀ
LIMITE DI
CORRENTE
USCITA ANELLO
DI VELOCITÀ
03.07
04.02
05.01
RICHIESTA
FINALE DI
CORRENTE
RETROAZIONE
DI CORRENTE
AMPLIF.
CORRENTE
www.controltechniques.com
T
M
Terminali per controllo
esterno
Punti di prova chiave
(variabili degli anelli)
Ingressi e uscite
programmabili dall'utente
LEGENDA
MONITOR
VELOCITÀ
05.03
ANGOLO
DIACCENSIONE
DEI TIRISTORI
PONTE A
TIRISTORI
(SCR)
ALIMENTAZIONE C.A.
Figura 8-9
TRASFORMATORI
CORRENTE
RILEVATORE
MONITOR
SOVRACCARICO CORRENTE
8.7
Diagrammi delle logiche dei menu
Panoramica della logica di controllo
87
01.18
88
www.controltechniques.com
RIF 4
01.20
RIF 3 01.19
RIF 2
RIF 1 01.17
1
0
1
1
0
01.01
Riferimento
di velocità
pre-offset
01.15
01.14
0
Selezione
rif.
2
Selezione
rif.
1
TB3-21
CONSENSO MARCIA
RIFERIMENTO
DI VELOCITÀ
INGR. F1
+
+
Offset
01.04
01.02
Riferimento
di velocità
post-offset
01.05
Rif.
jog
1
0
1
x(-1)
1
0
01.12
01.13
0
Selettore
inversione
riferimento
Selettore
Jog
01.06
01.07
01.08
01.09
I parametri nascosti sono in corsivo, es. 01.14
01.10
Selettore riferimento
unipolare/bipolare
08.01
0
1
Max. vel. av.
Min. vel. av.
Min. vel. ind
Max. vel. ind
01.16 01.11
Abilitazione Interblocco
marcia per riferimento 0
Lettura stato
ingresso F1
Logica interna
Logica R/O
Logica R/W
LEGENDA
01.03
RIFERIMENTO
DI VELOCITA
PRE-RAMPA
Rif.
'ATTIVATO'
Figura 8-10
Menu 01 Selezione e limiti del riferimento di velocità
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
www.controltechniques.com
02.07
02.11
Tempo di rampa
per jog 02.12
Acceler. 2 indietro
ACCELERAZIONE INDIETRO
01.03
1
0
1
0
1
0
1
0
1
0
1
0
02.18
Logica di
motore fermo
Selezione acceler. 2 indietro 02.17
Deceler. 2 indietro 02.10
DECELERAZIONE INDIETRO
Deceler. 1 indietro 02.06
Acceler. 1 indietro
1
0
Selezione deceler. 2 indietro 02.16
Deceler. 2 avanti 02.09
DECELERAZIONE AVANTI
Deceler. 1 avanti 02.05
RIFERIMENTO
DI VELOCITÀ
PRE-RAMPA
02.08
1
0
02.14
Selezione deceler. avanti 02.15
Acceler. 2 avanti
ACCELERAZIONE AVANTI
Acceler. 1 avanti 02.04
Selezione acceler. avanti
Selettore comune delle rampe
Selezione
jog
01.13
02.13
Abilitazione
rampa per jog
1
0
&
x 10
Logica 'and'
Congelamento 02.03
rampa
0
0
1
02.02
02.19
1
Abilitazione
rampa
Tiempo di
rampa
x 10
02.01
RIFERIMENTO
DI VELOCITÀ
POST-RAMPA
I parametri nascosti sono in corsivo, es. 02.08
&
Logica interna
Logica R/O
Logica R/W
LEGENDA
Figura 8-11
Menu 02 Selezione delle rampe
89
Rif. velocità
reale
1
0
90
www.controltechniques.com
03.04
TENSIONE
D'ARMATURA
03.26
INGRESSO
TACHIMETRICA
Valore
assoluto
Scalatura
1
0
03.01
Vvelocità
finale
richiesta
0
x 1.2
0
1
-
+
10.10
03.17
Compens.
RI
Soglia di
velocità zero
03.23
Scalatura
03.16
Limiazione della
tensione
d'armatura
03.05
03.06
Errore
di velocità
Regolazione del
fondo scala lettura
della velocità max.
(scalatura giri/min.)
03.25
Filtro
dell'errore
di velocità
Uscita finale
compensazione RI
03.02
+
Retroazione
di velocità
Selettore
riduzione della
compensazione RI
03.20
03.13
1
03.12
Selettore
retroazione da
enc. o analog
+
+ +
- +
+
Selettore retroazione
da dimamotachim.
o da tensione d'arm
03.14
Scalatura
encoder di
retroazione
1
0
Massima
tensione
d'armatura
03.15
03.19
ENCODER
(TACH. A IMPULSI)
03.18
1
0
Selezione rif.
velocità post-rampa
Offset fine
di velocità
Abilitazione
03.22
Selettore rif.
Rif.
di correzione
01.11
velocità
02.01
RIF. VELOCITÀ
POST-RAMPA
03.21
2
Velocità
zero
Retroazione
di velocità
(giri/min.)
Sommatoria
Comparatore
Logica interna
Logica R/O
Logica R/W
LEGENDA
03.07
I parametri nascosti sono in corsivo, es. 03.18
03.08
03.11
03.10
Sorgente
della funzione
derivativa
Integrale
dell'errore
di velocità
10.09
03.03
03.24
3
1
P.I.D.
03.09
USCITA ANELLO
DI VELOCITÀ
Figura 8-12
Menu 03 Selezione della retroazione e anello di velocità
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
04.21
04.20
www.controltechniques.com
03.07
USCITA ANELLO
DI VELOCITÀ
Soglia di partenza della
ricalibrazione 2 del
limite de corrente
Soglia di partenza della
ricalibrazione 1 del
limite de corrente
03.02
RETROAZIONE
DI VELOCITÀ
04.08
04.09
Offset di
corrente
04.14
04.15
04.16
04.17
Abilitazione quadrante 1
Abilitazione quadrante 2
Abilitazione quadrante 3
Abilitazione quadrante 4
Rif. di
coppia
04.12
04.13
Modalità del Bit 0
Modalità del Bit 1
Soglia di
ricalibrazione 2
superata
04.25
04.24
Soglia di
ricalibrazione 1
superata
04.04
04.07
04.10
04.18
04.19
04.22
04.23
04.11
1
0
Selettore offset
di corrente
04.01
Corrente
richiesta
04.03
Valore del limite
di corrente attivo
+
+
04.05
04.06
Limiti
Sommatoria
Logica interna
Logica R/O
Logica R/W
LEGENDA
04.02
CORRENTE FINALE
RICHIESTA
I parametri nascosti sono in corsivo, es. 04.07
Limite di I-P1
Limite di I-P2
Limite 1 di corrente
Limite 2 di corrente
Selezione limite 2 di corrente
Abilitazione cambio automatico al limite 2 di corrente
Temporizzatore per il cambio automatico al limite 2 di corrente
Pendenza della ricalibrazione 1 del limite di corrente
Pendenza della ricalibrazione 2 del limite di corrente
Figura 8-13
Menu 04 Selezione e limiti della corrente
91
92
www.controltechniques.com
05.04
Corrente nominale motore (soglia di sovrac.)
Tempo d'integr. sovraccarico (riscaldamento)
Tempo d'integr. sovraccarico (raffreddamento)
05.01
RETROAZIONE
CORRENTE
04.02
05.06
05.07
05.08
_
+
Scalatura
05.05
05.16
05.11
Sovraccarico
attuale
05.02
Retroazione di
corrente (ampere)
Regolazione del
fondo scala della di
corrente massima
Abilitazione autotaratura
Riduzione dell'anticipo limite d'innesco dei tiristori
Sovraccarico attuale
Guadagno I discontinuo
CORRENTE FINALE
Limite velocità
Guadagno P continuo
RICHIESTA
di variazione
Guadagno I continuo
della corrente
Costante del motore
PARAMETRI ANELLO DI CORRENTE
Inibizione accensione dei tiristori
Abilitazione dell'arresto logico
Modalità di arresto logico
Abilitaz. insertione sincronillata del secondo ponte tiristori (4Q - 12imp.)
Disabilitazione del controllo adattativo
Abilitaz. di funcionamento in sistema dodecafase serie unidirezionale (1Q - 12imp.)
Abilitazione al funzionamento in sistema dodecafase serie
Abilitazione al funzionamento in sistema dodecafase parallelo
Commutazione extrasicura del ponte
10.13
0
1
05.20
Abilitazione
controllo diretto
dell'accensione
dei tiristori
05.03
Sommatoria
Logica interna
Logica R/O
Logica R/W
LEGENDA
LETTURA ANGOLO
D'ACCENSIONE
DEI TIRISTORI
I parametri nascosti sono in corsivo, es. 05.10
02.01
Riferimento
di velocità
post-rampa
Allarme (Ixt)
05.09
05.10
05.11
05.12
05.13
05.14
05.15
05.17
05.18
05.19
05.21
05.22
05.23
05.24
05.25
05.26
Figura 8-14
Menu 05 Anello di corrente
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
www.controltechniques.com
1
0
Retroazione
di velocità
Impostazione del valore di
forza controelettromotrice
06.06
06.07
03.02
Valore
assoluto
Uscita compens.
caduta tensione RI2
06.01
-
+
0
1
06.14
Scalatura
X1
03.02 x 06.07
06.10
P
+I
Minima
corrente
di campo
06.17
Guadagno
integrale
dell'anello
di tensione
Selettore massima
corrente 2 di campo
(funzione risparmio campo)
Forza
controelettrom.
06.09
06.05
Compens. caduta
tensione RI2
06.20
Selettore sorgence per
compens. della caduta
di tensione RI2
06.07
Impostazione del
valore di forza
controelettromotrice
06.08
Massima corrente
2 di campo
Massima corrente
1 di campo
CORRENTE FINALE
RICHIESTA
04.02
03.08
INTEGRALE
DELL'ERRORE
DI VELOCITÀ
03.04
TENSIONE
D'ARMATURA
08.11
INGRESSO
ABILITAZIONE
CONVERTITORE
Parametri di
gestione
economia
Temporizzatore funzione di campo
economia di campo
Abilitazione temporizzazione 06.12
funzione economia di campo 06.15
06.02
1
0
Divisione
06.22
Limitazione
Anello P + I
0
1
P
I
06.19
06.21
ANGOLO
D'ACCENSIONE
DEI TIRISTORI
06.04
Limite dell'anticipo
d'accensione
dei tiristori
03.09
03.10
Controllo diretto
d'angolo
d'accensione
dei tiristori
06.13
P
+I
P
+I
Regolazione guadagni
anello di velocità
Abilitazione
del campo
controllato
.4
.
.2
.
Selletore
controllo
semicontrollato
o totalcontrollato
+ -
Scalatura
retroazione
di corrente
di campo
Retroazione
06.11 di corrente
06.24
del campo
Riduzione
06.03 guadagni
per il
fattore 4
06.23
06.16
Selettore guadagno
integrale anello di
corrente del campo
06.18
Riduzione
guadagni
per il fattore 2
.
.
Abilit. regolazione
guadagni dell'anello
velocità
Corrente
di campo
richiesta
.
.
Sommatoria
LEGENDA
I parametri nascosti sono in corsivo, es. 06.18
Logica interna
Logica R/O
Logica R/W
Figura 8-15
Menu 06 Controllo di campo
93
07.26
07.24
94
www.controltechniques.com
GP - 1
GP - 2
GP - 3
GP - 4
I parametri nascosti
sono in corsivo,
es. 07.11
0 bis ± 10V
0 bis ± 10V 4
0 bis ± 10V 5
6
0 bis ± 10V
7
(10 bit)
+segno
20
Ingressi analogici
secodari
Impedenza d'ingresso 100 k W
07.25
Selettore
encoder
07.04
Rif. in ingr.
al GP-4
07.03
Rif. in ingr.
al GP-3
07.02
Rif. in ingr.
al GP-2
07.01
Rif. in ingr.
al GP-1
V
1
0
0-20mA
20-0mA
4-20mA
20-4mA
Ingresso
07.19
Scalatura
ingr. GP4
07.18
Scalatura
ingr. GP3
07.17
Scalatura
ingr. GP2
07.16
07.20
07.14
Dest.
07.13
Dest.
07.12
Dest.
Def. rif. vel. 4
Par 1.20
Def. rif. vel. 3
Par 1.19
Def. rif. di coppia Par 4.08
Destinazione Def. rif. di
correzione
07.11
Par 3.18
07.05
Scalatura
rif. velocità
07.28 07.27
0
0
0
1
1
0
1
1
SELEZIONE INGRESSO
ANELLO CORRENTE
Riferimento di
velocità in
ingresso
Scalatura
ingr. GP1
Convertitore
tensionefrequenza
Scalatura del rif. da encoder
0
1
07.27
07.28
Selezione modo
di riferimento
in corrente
NOTA
GP2 diventa dedicato come
ingresso di alimentazione OK
(alim. in c.a. normale)
quando il parametro 11.24 = 1.
PL4
(12 bit)
+segno
TB1 - 03
Ingr. rif.
principale
di velocità
Selettore
riferimento
in corrente
Ingressi anello corrente / Encoder (Tach. imp.)
Def. tensione
d'arm. Par 3.04
Def. retroazione
di vel. Par 3.02
Def. vel. finale
richiesta Par 2.01
07.10
Sorg.
07.09
Sorg.
07.08
Sorgente
Destinazione Def. rif. 1
di velocita
07.15
Par 1.17
9
10
1
0
10.32
07.23
Scalatura
USC. DAC 2
07.22
Scalatura
USC. DAC 2
07.21
Scalatura
USC. DAC 1
ALLARME
SW1/6
Interruttori
SW1/6, 7, 8
vedere la
Fig 14
SW1/7
RV1
da 10
a 50 V
da 50
a 200 V
da 60
a 300 V
Sovratemperatura
motore
SW1/8
10.21
Disab. allarme
per sovratemp.
1800W
Logica
R/O
Logica
R/W
Logica
interna
LEGENDA
Carico max 5 mA
20
da 0 a +6,6 V (Impulsi di
corrisp. al accensione
campo da dei tiristori)
0 a 150% I
Imotore
11 da 0 a ± 10 V
DAC-1
Velocità richiesta
12 da 0 a ± 10 V
DAC-2
Velocità motore
13 da 0 a ± 10 V
DAC-3
Tensione
14
d'armatura
Uscite
analogiche
Ingresso generatore
tachimetrico (tachimetro)
T
20
8
Ingresso termistore
(interr. termico)
3300W
Figura 8-16
Menu 07 Ingressi e uscite analogici
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
www.controltechniques.com
08.01
08.0x
TB3-26
TB3-27
TB3-28
TB3-29
TB3-30
08.xx
STATO D'INGRESSO
08.06
08.07
08.08
08.09
08.10
TB3-22
TB3-23
TB3-24
TB3-25
F5
F4
F3
F2
STATO D'INGRESSO
08.02 Def. stato jog indietro
08.03 Def. stato jog avanti
08.04 Def. stato marcia indietro
08.05 Def. stato marcia avanti
TB3-21
NOTA
F10 diventa dedicato
come ingresso di Ponte
selezionato quando il
parametro 05.21 = 1
(esclusione ponte a 12 impulsi per
sistemi 4Q dodeca fasi in parallelo).
Stato d'ingresso
abilitazione
convertitore
ABILITAZIONE
08.11
TB4-31
F6
F7
F8
F9
F10
F2 (IR)
F3 (IF)
F4 (RR)
F5 (RF)
F1
STATO D'INGRESSO DEL
CONSENSO DI MARCIA
0
1
0
08.31
0
1
1
0
08.33
08.32
1
08.34
FUNZIONI
LOGICHE NORMALI
ABILITA MARCIA
AVANTI
ABILITA MARCIA
INDIETRO
ABILITA JOG AVANTI
ABILITA JOG INDIETRO
1
0
08.xx
Inversione 08.26
stato d'ingresso 08.27
08.28
08.29
08.30
1
0
08.2x
Inversione
stato d'ingresso
08.22
08.23
08.24
08.25
Def. 0
Def. 0
Def. 0
Def. 0
Def. 0
0
1
08.21
Disabilitazione funzioni
logiche normali
08.xx
Destinazione
08.16
08.17
08.18
08.19
08.20
08.2x
Destinazione
08.12 Def. 0
08.13 Def. 0
08.14 Def. 0
08.15 Def. 0
01.13
Selezione
jog
01.12
Selezione
inversione
riferimento
01.11
Rif.
ATTIVATO
I parametri nascosti
sono in corsivo,
es. 08.12
LE DESTINAZIONI
POSSONO ESSERE
SOLO BIT R/W
Inversione
Logica interna
Logica R/W
LEGENDA
Figura 8-17
Menu 08 Ingressi di logica
95
96
www.controltechniques.com
09.xx
Selettore
sorgente
stato
Def. allarme Ixt Par 10.53 ST3 09.19
Def. limite di I Par 10.03 ST4 09.21
Def. accens. tirist. in
ST5 09.23
ritardo limite Par 10.06
09.xx
Ingresso stato
ST1 = limite di correnteI AND velocità
zero = Stallo
Per esempio:
09.07 =
09.08 =
09.09 =
09.10 =
09.11 =
Selettore
sorgente
ST6
Def. vel. zero
1003 Limite di corrente Par 10.09
09.25
no inversione
stato
1009 velocità zero
no inversione
no inversione
OR A + B
NOR A + B
AND A x B
NAND A x B
&
1
0
09.xx
Inversione ST1 09.11
uscita. ST2 09.17
1
09.06
Controllato
da parametro
10.12 (NL)
Def. rif.
ST3 alarme
Ixt
Def. drive in
ST4 limite di
corrente
Def. accesione
ST5 tristori in
ritardo limite
Carico
contatti relè
250 V c.a. - 2,2A c.a.
110 V c.a. - 5A c.a.
5 V c.c. - 5A c.c.
Default
38 convertitore
pronto
39
37
36
Default
velocità
zero
Morsetto uscite relè
19
18
17
Morsetto
35
0
Def. veloc.
raggiunta
Uscite transistor NPN
a collettore aperto
16 ST2
15 ST1 Def. rif.
attivo
34
Uscita
stato
ST6
09.xx
Uscita
stato
ST3 09.03
ST4 09.04
ST5 09.05
Logica 'and'
Morsetto
&
Inversione
Logica R/W
LEGENDA
09.26
1
0
09.xx
Inversione
uscita
stato
ST3 09.20
ST4 09.22
ST5 09.24
09.xx
Uscita stato
ST1 09.01
ST2 09.02
NOTA
ST5 diventa dedicata come
uscita del Ponte selezionato
quando il parametro 05.21 = 1
(esclusione ponte a 12 impulsi per
sistemi 4Q dodecafasi in parallelo)
Inversione
stato d'usita
ST6
09.xx
Ritardo
ST1 09.12
ST2 09.18
Se la sorgente di stato non è un parametro bit,
l'ingresso alla porta "&" viene preso come 1,
a condizione che l'altra sorgente sia un
parametro bit.
Le uscite di stato 1 e 2 possono
essere una delle funzioni seguenti
di due bit qualsiasi:
1
0
09.xx
Inversione sorgente 2
ST1 09.10
ST2 09.16
1
0
09.xx
Inversione sorgente 1
ST1 09.08
ST2 09.14
I parametri nascosti sono in corsivo, es. 09.07
Ingresso stato
Selettore sorgente 2
Def. 0 ST1 09.09
Def. 0 ST2 09.15
Selettore
Def. rif. attivato sorgente 1
Par 01.11 ST1 09.07
Def. velocità ST2 09.13
raggiunta Par 10.07
09.xx
Ingresso stato
Figura 8-18
Menu 09 Uscite di stato
Guida Mentor ll dell'utente
Versione numero: 13
Guida Mentor ll dell'utente
Versione numero: 13
12.xx
Sorgente del
comparatore
12.03 C1
12.08 C2
12.xx
Livello
soglia
12.04 C1
12.09 C2
+
-
12.xx
Isteresi
12.05 C1
12.10 C2
www.controltechniques.com
Per controllare il parametro 02.18, il selettore Rampa comune,
per cambiare i tempi di rampa a una certa velocità.
Prova della coppia (sollevatori e gestione nastri).
2
1
0
1
Esempi d'uso delle soglie programmabili:
12.xx
Soglia
superata
12.01 C1
12.02 C2
12.xx
Inversione
uscita
12.06 C1
12.11 C2
12.xx
Destinazione
soglia
12.07 C1
12.12 C2
Anello isteresi
Inversione
Logica interna
Logica R/W
LEGENDA
Figura 8-19
Menu 12 Soglie programmabili
97
98
www.controltechniques.com
1
0
I parametri nascosti sono in corsivo, es. 08.21
13.04
x (-1)
0
0
0
07.05
Rif. di vel.
in ingresso
. 64
.
0
1
13.12
0
03.14
Scalatura
encoder di
retoazione
1
08.21
+
+
+
-+
0
1
Logica interna
Logica R/O
0
1
x (-1)
Logica R/W
01.12
Selettore
inversione
riferimento
Selettore
riferimento
encoder/precisione
Stato
d'ingresso F2
jog inverso Disabilitazione
delle funzioni
logiche normali
08.02
13.02
1
08.03
Stato
d'ingresso F3
jog avanti
O
1
13.13
Incremento
contatore slave
13.14
07.24
1
07.25
Contatore
d'impulsi
Encoder slave
(retroazione)
01.05
Riferimento
jog
Riferimenti
di precisione
di velocità
(16 bit)
(13.07x 256) + 13.06
13.03
13.01
Scalatura
rif. encoder
Autotenuta
riferimento
di precisione
Incremento
contatore
master
Contatore
d'impulsi
encoder
master
(riferimento)
Selettore
riferimento
encoder
. 8192
.
Limitazione
Sommatoria
LEGENDA
EPOS
32 Bit
OR
&
1
13.08
256
1
0
03.12
Selettore
retroazione
analogica/encoder
& Logica 'and'
13.05
1
0
1
Limite di correzione
dell'anello
di posizione
Guadagno
Errore
dell'anello
13.09
posizione
0
di posizione
Abilitazione aggancio rigido 13.11
Velocità raggiunta 10.07
Abilitazione/albero electrico digtale 13.10
Selettore rif. post-rampa 03.21
Selettore rif. correzione velocità 03.19
Selettore JOG 01.13
Riferimento ATTIVATO 01.11
0
13.10
03.02
Retroazione
di velocità
03.18
Rif. de
correzione
velocità
01.18
Feed-forward
velocità
Abilitazione
albero elettrico
digitale
Figura 8-20
Menu 13 Albero elettrico
Guida Mentor ll dell'utente
Versione numero: 13
9
Procedure diagnostiche
9.1
Codici di allarme
Mnem. Codice Causa dell'allarme
AOC
121 Sovracorrente d'indotto
Un allarme istantaneo di protezione è stato attivato a causa di una corrente eccessiva nel circuito
dell'indotto
AOP
126 Circuito interrotto
Il convertitore ha rilevato che l'angolo d'innesco è anticipato, ma non ha rilevato alcuna retroazione della
dell'indotto
corrente
cL
104 Circuito interrotto nell'anello Se il riferimento d'ingresso è 4-20 mA o 20-4 mA, questo allarme indica che la corrente d'ingresso è <3,0
di corrente (controllo)
mA
EEF
132 Guasto alla EEPROM
Indica che è stato rilevato un errore nel parametro impostato letto dalla EEprom all'accensione
EPS
103 Alimentazione esterna
Intervento dell'allarme per sovracorrente sul terminale di uscita dell'alimentazione 24 V (TB4-33), a
indicare un sovraccarico nel circuito esterno collegato a questa alimentazione. La corrente massima
disponibile è di 200 mA
Et
102 Allarme esterno
Parametro 10.34 = 1. È intervenuto l'allarme esterno impostato dall'utente.
FbL
119 Perdita di retroazione
Mancanza di segnale dal generatore tachimetrico (tachimetro) o dall'encoder (tachimetro a impulsi)
Fbr
109 Inversione della retroazione Polarità errata del tachimetro della retroazione o dell'encoder. Questo allarme non interviene nei
convertitori a 1Q
FdL
118 Perdita di campo
Mancanza di corrente nel circuito di alimentazione del campo
FdO
108 Campo attivato
L'utente ha avviato l'autotaratura (05.09) e la corrente di campo è stata rilevata
FOC
106 Sovracorrente di campo
Corrente eccessiva rilevata nella retroazione della corrente di campo. Se la retroazione della corrente è
presente e l'angolo d'innesco è retrofasato, allora si ha l'allarme.
hF
100 Anomalia hardware
Un'anomalia hardware è stata rilevata durante la routine di autodiagnosi eseguita dopo l'accensione. Si
raccomanda agli utenti di rivolgersi al fornitore del convertitore.
It
122 I x t trip
La protezione integrata contro le correnti do sovraccarico ha raggiunto il livello d'allarme.
Oh
107 Surriscaldamento
Sovratemperatura del dissipatore a tiristori (SCR). Solo nei convertitori dotati di termistori (interruttori
termici) per il dissipatore
Pc1
124 Sistema di sorveglianza
Indica che un'anomalia nell'hardware MDA1 è stata rilevata mediante l'errato funzionamento del software
processore 1
del Processore 1
Pc2
131 Sistema di sorveglianza
Indica un errato funzionamento del Processore 2, oppure un bug nel software (opzione MD29)
processore 2
PhS
101 Sequenza della fasi
I collegamenti a E1 e a E3 non corrispondono alle stesse fasi connesse a L1 e a L3. Investigare e
correggere
PS
125 Alimentazione
Una o più delle alimentazioni interne è fuori tolleranza.
(Solo nel modo comun. seriali 3) Nessun dato di ingresso rilevato.
ScL
105 Perdita del collegamento
(interfaccia) della
comunicazioni seriali
SL
120 Perdita di alimentazione
Circuito interrotto di una o più delle fasi di alimentazione (ingresso).
th
123 Termistore (interruttore
Il termistore (interruttore termico) per la protezione del motore ha avviato un allarme indicando il
termico)
surriscaldamento degli avvolgimenti.
Soglia di allarme 3 kΩ±5%. Reset 1,8 kΩ
A29 40 - 69 Indica un'anomalia della
Vedere la Guida MD29 dell'utente
MD29
Se il convertitore va in allarme, il display indice mostra triP e il
messaggio di dati lampeggia. Il display dati mostra una mnemonica per
indicare la causa dell'allarme.
Gli ultimi quattro codici di allarme sono memorizzati nei parametri da
10.25 a 10.28 e sono disponibili per un'interrogazione non influenzata dai
cicli di inserimento/disinserimento della potenza. I dati memorizzati in
questi parametri vengono aggiornati unicamente dall'allarme successivo.
NOTA
Qualora si verifichi un allarme, i valori di tutti i parametri RO sono congelati
e rimangono tali per l'interrogazione mentre si ricerca la causa
dell'anomalia. Per accedere al modo di modifica dei parametri dal modo di
allarme, premere uno qualsiasi dei cinque tasti di modifica. Per riaccedere
al modo di allarme, entrare nel Menu 00 e premere il tasto SINISTRA.
NOTA
Se l'allarme persiste, rivolgersi al proprio fornitore. Eventuali tentativi di
riparazione del convertitore possono comportare l'annullamento della
garanzia.
Codici di allarme in ordine numerico
A29
hF
40 - 69
100
Anomalia MD29
Anomalia hardware
Guida Mentor ll dell'utente
Versione numero: 13
PhS
Et
EPS
cL
SCL
101
102
103
104
105
Sequenza della fasi
Allarme esterno
Alimentazione esterna
Circuito interrotto nell'anello di corrente (controllo)
Perdita del collegamento (interfaccia) delle
comunicazioni seriali
FOC
Oh
FdO
Fbr
FdL
FbL
SL
AOC
It
th
Pc1
PS
AOP
Pc2
EEF
106
107
108
109
118
119
120
121
122
123
124
125
126
131
132
Sovracorrente di campo
Surriscaldamento
Campo attivato
Inversione della retroazione
Perdita di campo
Perdita di retroazione
Perdita di alimentazione
Sovracorrente d'indotto
Allarme I x t
Termistore (interruttore termico)
Sistema di sorveglianza processore 1
Alimentazione
Circuito interrotto dell'indotto
Sistema di sorveglianza processore 2
Guasto alla EEPROM.
99
www.controltechniques.com
10
Comunicazioni seriali
I circuiti di controllo sono isolati da quelli di alimentazione
mediante un solo isolamento standard. L'installatore deve
accertarsi che tutti i circuiti esterni di controllo non possano
accidentalmente essere toccati dal personale ricoprendoli
con almeno uno strato isolante classificato per le tensioni di
alimentazione in c.a.
AVVERTENZA
Nel caso in cui sia necessario collegare i circuiti di controllo
ad altri circuiti classificati come a Tensione molto bassa di
sicurezza (SELV) (ad esempio quello di un personal
computer), sarà necessario installare un'ulteriore barriera
isolante al fine di conservare la classificazione SELV.
AVVERTENZA
Tutti i convertitori Mentor II sono dotati di serie di un'interfaccia per le
comunicazioni. Si tratta di un'interfaccia macchina-macchina che
consente l'utilizzo di uno o più convertitori in sistemi controllati da un
host quale un controller logico di processo (PLC) o un computer.
I convertitori Mentor II possono essere controllati direttamente, la loro
configurazione operativa può essere modificata e il loro stato può essere
oggetto di interrogazione da parte di un tale host ed essere
continuamente monitorato da un'apparecchiatura di registrazione dati.
I componenti di tutti i messaggi fra l'host e un convertitore Mentor II sono
formati da caratteri ASCII. Il formato di un messaggio, cioè la sequenza
nella quale compaiono i caratteri, è standardizzata per i messaggi di
ogni tipo ed è spiegata nel sottocapitolo Struttura dei messaggi, riportato
di seguito.
10.2
Regolazioni preliminari del
convertitore
Ogni convertitore richiede un numero identificativo esclusivo, o un
indirizzo seriale, impostato dal parametro 11.11. Il parametro Velocità di
trasm. in baud 11.12 deve essere impostato in modo che vi sia
corrispondenza con l'host. I dati, lo stato del convertitore e
l'impostazione dei parametri possono essere letti nel convertitore in ogni
modo di funzionamento, a condizione che il convertitore stesso sia
acceso e che l'indirizzo seriale e la velocità di trasmissione in baud siano
impostati correttamente.
La tabella qui sotto riporta le designazioni dei terminali del connettore
PL2 per entrambi i collegamenti delle comunicazioni RS422 e RS232.
N. polo
RS232
RS422
1
NC
0V
La porta delle comunicazioni del convertitore è il connettore PL2
(Figura 6-5 a pagina 22). La connessione standard è l'RS422.
2
TXD
TXD
3
RXD
RXD
4
Il protocollo è l' ANSI x 3,28 - 2,5 - A4, lo standard per le interfacce
industriali.
5
Collegamenti
L'interfaccia per le comunicazioni seriali è disponibile sul connettore a 9
poli tipo D contrassegnato PL2 sulla scheda MDA2B. Questo connettore
fornisce l'interfaccia standard RS422.
6
0V
TXD
7
0V
RXD
Il convertitore Mentor è equivalente ai carichi di due unità e quindi si
possono collegare fino a 15 convertitori a un controller host prima che si
renda necessario l'utilizzo di ripetitori. Quando si utilizzano ripetitori,
si possono collegare fino a 99 convertitori.
9
NOTA
Lo standard RS422 è praticamente uguale all'RS485, con la differenza
principale che quest'ultimo consente l'impiego di più di un controller master.
Alla porta RS422 può essere effettuato un collegamento
RS232, ma è un'operazione raccomandata solo per la
messa in servizio a causa delle sue specifiche tecniche di
livello inferiore (reiezione di basso rumore, lunghezza del
cavo limitata ecc.). Si noti che il collegamento RS232 è
diverso dall'RS422/485 a due fili.
PRECAUZIONE
10.1
Collegamento al convertitore
Porta per le comunicazioni seriali 485
MentorSoft si collega alla porta RS485 del Mentor II mediante un
convertitore standard a 4 fili da RS232 a RS485, oppure costruendo il
conduttore seguente:
PC 25 vie
PC 9 vie
PL2 9 vie
3
2
2
2
3
3
7
5
1+6+7
(collegare i tre terminali)
8
10.3
Percorso del cavo delle
comunicazioni seriali
Un cavo per le comunicazioni dei dati non deve correre parallelo a
qualsiasi cavo di alimentazione, soprattutto a quelli che collegano i
convertitori ai motori. Nei casi in cui non sia possibile evitare tratti di cavi
posati parallelamente, verificare che il cavo delle comunicazioni seriali e
quello di alimentazione siano ad almeno 300 mm l'uno dall'altro.
Se i cavi devono incrociarsi, fare in modo che siano ad angolo retto l'uno
rispetto all'altro per ridurre al minimo la possibilità che insorgano
problemi.
Il cavo utilizzato per un collegamento RS422 può raggiungere una
lunghezza massima di circa 1.000 metri.
10.4
Terminazione
Quando si utilizza una rete multi-drop RS422, occorre collegare un
resistore da 120 Ω fra le due linee di ricezione dell'ultima unità del bus
(cioè l'unità più distante dall'host). Si deve prestare attenzione per
assicurarsi che le altre unità della rete non presentino già un resistore,
altrimenti si verificherebbe una perdita eccessiva di segnale. Il resistore
di terminazione può essere installato fra i due montanti contrassegnati
con R6 alla destra del connettore a 9 poli tipo D.
Qualora si incontrino problemi...
Non si riesce a effettuare il collegamento in linea:
Controllare i collegamenti sul convertitore.
Effettuare un autorilevamento della velocità di trasmissione.
Assicurarsi di avere selezionato la porta “COM”corretta.
Assicurarsi che il Mentor II sia nel modo ANSI a 4 fili (11.13 = 1).
100
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
10.5
Componenti dei messaggi
10.6
Struttura dei messaggi
10.5.1
Caratteri di controllo
10.6.1
Dall'host al convertitore
Per conformarsi alla struttura standard di un messaggio, le fasi di
quest'ultimo sono segnalate da caratteri di controllo. Ogni carattere ha
un significato specifico, un'abbreviazione standard ed è trasmesso e
ricevuto in codice ASCII. Se un messaggio viene inserito da una
tastiera, i caratteri di controllo sono immessi tenendo premuto il tasto
Control e battendo un'unica lettera. Dei 32 caratteri di controllo della
serie ASCII, i sette contenuti nella tabella seguente sono quelli utilizzati
nel Mentor II per le comunicazioni seriali.
Tabella 10.1
Caratteri di controllo nei convertitori Mentor II
Carattere
Significato
Codice
ASCII
ESAD.
Combin.
tasti
EOT
Reset, o “Now hear this”, o End
of Transmission
04
D
ENQ
Enquiry, interrogazione del
convertitore
05
E
STX
Start of text (Inizio del testo)
02
B
ETX
End of text (Fine del testo)
03
C
ACK
Acknowledge (messaggio
riconosciuto)
06
F
Backspace (passaggio al
parametro precedente)
08
H
Negative acknowledge
(messaggio non riconosciuto)
15
U
BS
NAK
10.5.2
Indirizzo seriale
A ogni convertitore è assegnato un identificativo o un indirizzo
(parametro 11.11) affinché sia esclusivamente il convertitore interessato
a rispondere. Per sicurezza, il formato prevede che ogni cifra
dell'indirizzo a due cifre del convertitore sia ripetuta, quindi l'indirizzo del
convertitore numero 23 viene inviato sotto forma di quattro caratteri:
2
2
3
3
I messaggi dall'host al convertitore sono di due tipi:
una richiesta di informazioni,
oppure un comando.
Entrambi i tipi devono iniziare con il carattere di controllo EOT
(Control-D) per preparare il convertitore a ricevere un nuovo messaggio.
Tale carattere è seguito poi dall'indirizzo seriale del convertitore che
riceve il messaggio. Il formato dei dati e la scelta del carattere di
controllo per chiudere il messaggio è diverso per i due tipi.
Per una richiesta di informazioni, l'invio del numero del parametro
seguito da ENQ istruisce il convertitore particolare chiamato in causa a
fornire dati relativi a quel parametro.
Per un comando, un carattere di controllo dopo l'indirizzo seriale
informa il convertitore che il messaggio deve essere un'istruzione
riguardante i suoi parametri operativi e che la parte successiva del
messaggio conterrà un numero di parametro e i dati dell'istruzione. I dati
dell'istruzione occupano da cinque a nove caratteri, oppure dieci per
l'alta risoluzione. Un messaggio di istruzioni viene chiuso dal carattere di
controllo ETX seguito da un carattere di controllo del blocco (BCC,
prossima sezione).
10.6.2
Dal convertitore all'host
I messaggi dal convertitore all'host sono di due tipi:
la risposta a una richiesta di dati,
o il riconoscimento di un messaggio.
Nella risposta a una richiesta di dati, il carattere di controllo iniziale è
STX, seguito dal numero del parametro per confermare la richiesta
dell'host e poi dai cinque caratteri di dati. Il messaggio viene chiuso dal
carattere di controllo ETX e da un carattere di controllo del blocco (BCC).
Un messaggio viene accettato mediante il carattere di controllo ACK se
è riconosciuto, oppure non è accettato mediante la riposta NAK se non è
valido, oppure se presenta un'errata formattazione o è corrotto.
10.7
Convertitori multipli
L'indirizzo seriale segue immediatamente dopo il primo carattere di
controllo del messaggio.
Un messaggio può essere inviato simultaneamente a due o più indirizzi.
Se tutti i convertitori devono rispondere alla stessa richiesta o istruzione,
il messaggio viene trasmesso all'indirizzo 0 (zero).
10.5.3
10.8
Numeri interi estesi - modo seriale 4
10.8.1
Risoluzione
Identificazione del parametro
Per la trasmissione mediante collegamento seriale (interfaccia), i
parametri sono identificati dalle quattro cifre che rappresentano il menu
e il numero del parametro stesso, ma senza il punto decimale, che viene
utilizzato per maggiore chiarezza nel testo di questa Guida. Per
esempio, per inviare menu 04, parametro 26, scrivere 0 4 2 6.
10.5.4
Campo dati
I dati da inviare o richiesti occupano i cinque caratteri successivi al
numero del parametro. Tutti i parametri operativi del convertitore sono
valori numerici, come il carico, la corrente, ecc. Il campo per i dati ha
una lunghezza variabile e può arrivare fino a cinque caratteri (vedere
comunque il riferimento alla risoluzione aumentata, nella pagina
precedente). Non viene utilizzato il punto decimale.
Lo stato dei parametri bit viene trasmesso e ricevuto come dati di
valore reale 0 o 1. Anche qui, il formato è flessibile, a condizione che
non si utilizzino più cinque caratteri, per esempio:
0
1
1
Alcuni parametri possono essere impostati a una risoluzione maggiore di
quella visualizzata o letta dall'interfaccia seriale. Si tratta dei parametri
reali con un campo di 65535.
Se l'utente desidera impostare la variabile a una risoluzione maggiore,
nel campo dati occorre inserire sei cifre. Il Mentor II riconosce quindi la
richiesta di una risoluzione maggiore. Per esempio, per impostare la
richiesta di velocità al 47,65% della velocità massima, trasmettere:
+
0
4
7
6
5
I parametri interi estesi (a 16 bit) sono il 13.14, 15.60, 15.61, 15.62 e
15.63. Se un numero intero esteso viene inviato attraverso il
collegamento delle comunicazioni (interfaccia), i dati vengono formattati
come cinque caratteri ASCII, senza “segno” nel campo dati. Tutti i
parametri possono essere scritti tramite l'interfaccia seriale con cinque
caratteri ASCII se non viene incluso il segno. Per ulteriori informazioni,
vedere il parametro 11.13, Capitolo 6 o 7.
- e così via.
10.5.5
Carattere di controllo del blocco (BCC)
Affinché il convertitore e l'host assicurino che i messaggi da uno all'altro
non si siano corrotti in fase di trasmissione, tutti i comandi e le risposte di
dati devono essere conclusi da un carattere di controllo del blocco
(BCC, prossima sezione).
Guida Mentor ll dell'utente
Versione numero: 13
101
www.controltechniques.com
10.9
Invio di dati
10.10.1
Comando dell'host:
reset indirizzo inizio testo menu e parametro da 1 a 5 caratteri di dati fine BCC
10.10.2
10.10.3
“cambia il riferimento di velocità 1 del convertitore numero 14 al
47,6% in funzionamento inverso”
1 1 4 4
Control
-D
PARAM
STX
DATI
CONBCC
TROLLO
0 1 1 7 - 0 4 7 6
Control
-B
,
ETX
Dapprima, un operatore OR esclusivo viene eseguito su tutti i caratteri
del messaggio dopo il parametro di comando di inizio testo.
se il messaggio non è valido, se i dati sono troppo lunghi
o se il carattere BCC non è corretto.
Per esempio, se il messaggio da inviare al convertitore numero 14 è:
“imposta il riferimento di velocità 1 al 47,6% della piena velocità in
funzionamento inverso”
10.10
Richiesta dell'host:
reset indirizzo parametro fine
Indirizzo seriale
1144
Inizio del testo
STX (Control-B)
Non incluso nel calcolo del carattere BCC
Parametro
CONTROLLO
INDIRIZZO
1
1
2
PARAM
2
0
1
1
CONTROLLO
7
Control
-D
- (un segno meno)
476
0476
Fine messaggio
ETX (Control-C)
infine,
Carattere BCC, calcolato come mostrato
Ciascuna delle cifre separate
0 1 1 7 - 0 4 7 6 e Control-C
è rappresentata da un carattere esadecimale e calcolata in binario come
mostrato nella tabella. L'operatore XOR viene mostrato
progressivamente per ogni carattere.
Il convertitore risponde nella forma seguente:
inizio parametro 5 caratteri di dati fine -
Carattere
menu
BCC
0
1
1
DATI
7
-
0
4
CONTROLLO
7
6
ETX
BCC
,
Control
-C
La risposta conferma dapprima che i dati inviati sono il riferimento di
velocità 1 (01.17); i cinque caratteri immediatamente seguenti
forniscono l'impostazione attuale come percentuale della piena velocità.
Il primo carattere è + o -, a indicare la direzione di rotazione; il resto è il
valore numerico. In questo esempio, il messaggio indica l'inversione al
47,6% della piena velocità.
Carattere ASCII
0
011
0000
1
011
0001
1
011
7
011
- (meno)
XOR
000
0001
0001
011
0000
0111
000
0111
010
1101
010
1010
0
011
0000
001
1010
4
011
0100
010
1110
7
011
0111
001
1001
6
011
0110
010
1111
ETX
000
0011
010
1100
parametro
PARAM
0 1 1 7 (N. Menu e n. parametro)
Inversione
ENQ
Control
-E
CONTROLLO
EOT (Control-D)
Qui inizia il calcolo del carattere BCC
Per esempio, per trovare il punto preimpostato di velocità 01.17 del
convertitore numero 12, inviare:
EOT
Esso viene trasmesso come:
Reset
Lettura dei dati
Il convertitore invierà qualsiasi dato all'host, a condizione che la richiesta
sia valida. Il formato di un messaggio di richiesta dati è:
Control
-B
Carattere di controllo del blocco (BCC)
se il messaggio è riconosciuto e implementato,
Se un valore inviato non rientra nei limiti di un parametro, il convertitore
risponderà con NAK.
STX
Numero di parametro non valido
Se l'host invia un numero di parametro che il convertitore non riconosce,
per esempio 1723, il convertitore risponderà con EOT.
Affinché i dati ricevuti possano essere verificati, un carattere di controllo
del blocco viene aggiunto al termine di ogni risposta di comando o di
dati. Il carattere BCC viene automaticamente calcolato dalla logica di
invio ed è derivata nel modo seguente.
oppure
NAK
10.10.4
10.10.5
Control
-C
Il convertitore risponderà con un riconoscimento o un mancato
riconoscimento, ovvero con:
ACK
Parametro precedente
Al fine di ottenere dati dallo stesso convertitore per il parametro
precedente in ordine numerico, inviare backspace BS (Control-H).
sarebbe inviato come:
CONINDIRIZZO
CONTROLLO
TROLLO
Parametro successivo
Al fine di ottenere dati dallo stesso convertitore per il parametro
successivo in ordine numerico, inviare il riconoscimento ACK
(Control-F). Il convertitore risponderà trasmettendo i dati relativi al
parametro successivo in sequenza.
Per esempio, il messaggio al convertitore:
EOT
Ripetizione dell'interrogazione
Il mancato riconoscimento NAK (Control-U) può essere utilizzato dal
tastierino per fare sì che il convertitore invii ripetutamente i dati dello
stesso parametro. Consente di risparmiare tempo quando si esegue il
monitoraggio del valore di un parametro in un arco di tempo.
102
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
L'operatore finale XOR, sottolineato, è il carattere BCC a condizione che
il suo valore decimale equivalente sia maggiore di 31.
Poiché i caratteri ASCII dall'esadecimale 00 a 1F sono utilizzati
esclusivamente per codici di controllo, il carattere BCC deve superare il
valore decimale di 31. Ogniqualvolta XOR produce un numero
(equivalente decimale) minore di 32, viene aggiunto 32. Quindi,
nell'esempio XOR precedente,
010 1100
= 44 decimale e quindi il BCC è il carattere 44
per il quale il carattere ASCII è =,
Ne deriva che il messaggio completo per impostare la velocità del
convertitore numero 14, diciamo, a 47,6% in funzionamento inverso è
come quello mostrato nell'esempio della pagina precedente.
10.11
Utilizzo del Mentor in una rete con
altri convertitori CT
A differenza di altri prodotti della Control Techniques quali l'Unidrive o la
scheda MD29, il Mentor non supporta la funzione di indirizzo del gruppo.
È quindi importante che, quando un Mentor si trova nella stessa rete di
convertitori che invece supportano l'indirizzo del gruppo, l'indirizzo del
convertitore definito nel parametro 11.11 non contenga uno zero. In altre
parole, occorre scegliere l'indirizzo 11 o maggiore ed escludere i numeri
20, 30, 40 ecc. In questo modo si assicura che i messaggi inviati al
Mentor non siano fortuitamente riconosciuti da altri convertitori come
comandi di gruppo.
10.12
Indirizzamento globale
Il convertitore Mentor II supporta inoltre l'uso dell'indirizzamento globale.
È l'indirizzo tramite il quale un messaggio può essere trasmesso a tutti i
convertitori della rete; per utilizzare questa funzione, il controller invierà il
suo messaggio all'indirizzo 00. Si noti che quando si utilizza
l'indirizzamento globale, i convertitori non rispondono ad alcun
messaggio di comando.
Guida Mentor ll dell'utente
Versione numero: 13
103
www.controltechniques.com
11
Opzioni
11.4
Le opzioni seguenti sono disponibili per il convertitore Mentor II:
11.1
Profibus-DP (MD24)
Interfaccia dedicata Profibus-DP per il bus delle comunicazioni con una
velocità massima di 1,5 Mbit/sec. La scheda MD24 non offre la
programmabilità della MD29.
MD29
Scheda della applicazioni programmabile dall'utente tramite un
linguaggio tipo basic chiamato DPL (Drive Programming Language),
che utilizza un toolkit basato su Windows. Al fine di implementare i
sistemi di controllo distribuito e il “Soft Logic Control” in base alla
IEC61131-3, utilizzare il Workbench SYPT (SYstem Programming Tool).
Questa scheda supporta la programmazione in scala e dei blocchi di
funzione, nonché la programmazione DPL. Ciò consente all'utente di
personalizzare notevolmente il convertitore mediante l'implementazione
di anelli di controllo o di funzioni supplementari.
La MD29 presenta di serie un controller della posizione ad asse singolo,
una porta RS485 che offre modi supplementari quali il master ANSI,
il Modbus-RTU e il Modbus-ASCII. Sono inoltre disponibili le opzioni
software seguenti:
Controller di posizione ad asse unico
(integrato di serie)
Offre il posizionamento dell'unità slave o il controllo della
velocità mediante rampe lineari o ad S per il profilo della
velocità; albero elettrico rigido e non rigido con un aggancio del
rapporto dello slave avente un'accuratezza di 8 decimali; tabella
incrementale della camma che fornisce il controllo automatico
della posizione dello slave rispetto al master; anello di controllo
PID.
Rampa a S
La rampa a S è studiata per un'accelerazione progressiva.
Essa consente passaggi veloci e graduali verso e dalle rampe di
accelerazione e decelerazione.
PID
Il PID è un anello di controllo supplementare del convertitore
Mentor II.
I termini proporzionale, integrale e derivativo possono essere
selezionati in modo da agire su un errore fra un riferimento e il
suo segnale di retroazione come per esempio un rullo ballerino.
Ogni termine è variabile in modo da consentire l'adattamento del
pacchetto a ogni applicazione.
Avvolgimento centrale
L'avvolgimento centrale consente al Mentor II di essere tarato
sulle caratteristiche della macchina e del processo in
applicazioni di avvolgimento e di svolgimento.
11.5
DeviceNet (MD25)
Interfaccia dedicata DeviceNet. La scheda MD25 non offre la
programmabilità della MD29.
11.6
Scatola degli I/O
Unità remota che può essere connessa alla scheda MD29 tramite un
collegamento RS485. La scatola degli I/O presenta 8 ingressi digitali,
8 uscite digitali, 5 ingressi analogici e 3 uscite analogiche. Sono inoltre
disponibili ulteriori 24 porte di I/O digitali in logica TTL per il
collegamento di interruttori con rotella zigrinata, ecc.
Hardware e software aggiuntivi per la gamma Mentor
II di convertitori in c.c.
1. Modulo di controllo del campo FXM5
2. Software
11.7
Unità di controllo del campo FXM5
Riepilogo
L'unità FXM5 consente al convertitore Mentor II di azionare un motore
con un campo variabile mediante il controllo digitale. I parametri nel
Menu 06 (Controllo di campo) sono forniti di serie per essere utilizzati
insieme al controller FXM5. Il parametro 06.11 scala la corrente,
come mostrato nella tabella riportata nella pagina seguente.
L'FXM5 è adatto per motori con corrente di campo fino a 20 A e viene
installato esternamente al convertitore. Questa unità può essere
aggiornata dall'utente sul posto di utilizzo, se lo si desidera.
NOTA
È fondamentale che i collegamenti (ponticelli) LK1 e LK2 sulla scheda di
potenza MDA75, MDA75R, MDA210, MDA210R o il collegamento LK1
sulla MDA6 siano interrotti prima di utilizzare il convertitore con il
Controllo di campo FXM5.
Orientamento del mandrino
Si tratta di un anello di controllo per mantenere l'albero del
motore in una posizione selezionata fissa per il cambio
automatico dell'utensile nelle macchine utensili computerizzate.
Velocità digitale e anello della posizione
Fornisce il controllo preciso della velocità e consente la
sincronizzazione di due alberi.
11.2
CTNet (MD29AN)
Questa scheda offre tutte le funzioni della MD29, ma con l'aggiunta della
rete di controllo distribuito CTNet. CTNet è una rete ad alte prestazioni
che lavora a 5 Mbit/sec. Non richiede alcun controller master e presenta
facili e piene funzioni di configurazione del trasferimento ciclico di dati e
del trasferimento non ciclico paritetico di dati di parametri del
convertitore e di qualsiasi altro dato.
11.3
Interbus-S (MDIBS)
Interfaccia dedicata Interbus-S per il bus delle comunicazioni. La scheda
MDIBS non offre la programmabilità della MD29.
104
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Figura 11-1 Dimensioni dell'FXM5
FORI DI MONTAGGIO diam. 7 mm (0,28 poll.)
C
D
E
A
FLUSSO
ARIA
B
DIMENSIONI
F
G
Unità FXM5. Dimensioni d'ingombro e di montaggio
11.7.1
A
B
C
D
E
F
G
Dati di avviamento dell'FXM5
mm
112,5
250
176
162
150
112
225
poll.
4,43
9,84
6,93
6,38
5,91
4,41
8,86
11.7.3
La corrente di campo massima fornita dall'FXM5 è determinata dal
numero di spire del primario del DCCT (specificato e fornito con l'unità
FXM5) e dall'impostazione del collegamento (ponticello) LK1 sull'FXM5.
Il collegamento LK1 può trovarsi in una delle due posizioni, in modo che:
20
15
Massimo IF = -------- o -------Np
Np
dove Np è il numero di spire del primario del DCCT.
Corrente
massima
Spire
primario
A
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
Np
10
10
5
5
4
3
2
2
2
2
1
1
1
1
1
1
1
1
1
1
N
Se l'FXM5 è controllato dal Mentor attraverso un cavo a piattina, occorre
allora instradare tale cavo in modo da tenerlo distante dalle sbarre di
distribuzione c.a., oppure utilizzare un manicotto per impedire il contatto
con la sbarra.
11.7.2
N
NOTA
Il modello (revisione) 2 dell'FXM5 non deve essere utilizzato con
versioni precedenti del software del Mentor II.
In combinazione con l'impostazione del parametro 6.11, la corrente di
campo che ne risulta può essere regolata a uno dei 20 valori da 1 A a
20 A con incrementi di un ampere. (Vedere 06.11 Scalatura retroazione
corrente di campo.)
NOTA
Corrente di campo massima, versione
software V4.3.0 e successive del Mentor II
per il controllo digitale
Fusibili di protezione
Si noti che il circuito di uscita del campo è protetto da fusibili da 20 A
forniti di serie (FS3 e FS4). Qualora sia richiesta una corrente di campo
superiore a 9 A, i fusibili devono essere sostituiti con altri del tipo HRC
con valore di taratura appropriato.
NOTA
Posizione LK1
20
15
Np
Np
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
9
Parametro
06.11
impostazione
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
N
Il controller di campo indebolirà il campo anche se la protezione della
tensione d'indotto può essere attiva.
Guida Mentor ll dell'utente
Versione numero: 13
105
www.controltechniques.com
12
12.1
Compatibilità
elettromagnetica
12.2
Immunità
Presumendo che le istruzioni fornite nella presente Guida dell'utente
siano implementate correttamente, il Mentor II presenta
un'eccellente immunità alle interferenze prodotte da sorgenti all'esterno
del convertitore.
Nota generale sui dati EMC
Le informazioni fornite nella presente Guida dell'utente sono derivate da
prove e calcoli su prodotti campione. Esse sono fornite al fine di facilitare
la corretta applicazione del prodotto e si ritiene che rispecchino
fedelmente il comportamento di quest'ultimo quando viene azionato in
base alle istruzioni. L'inserimento di tali dati nella guida non rientra in
alcun contratto né impegno assunto dal costruttore. Ove sia dichiarata la
conformità a una norma specifica, la società costruttrice ha assunto tutte
le misure ragionevoli per assicurare la conformità dei suoi prodotti. I
valori specifici forniti sono soggetti alle normali variazioni tecniche fra i
campioni dello stesso prodotto. Tali valori possono inoltre essere
influenzati dall'ambiente di utilizzo del convertitore e dai dettagli della
configurazione dell'installazione.
Per informazioni più dettagliate, vedere la scheda tecnica EMC del
Mentor II.
Il convertitore è conforme alle seguenti norme europee e internazionali
armonizzate riguardanti l'immunità.
L'immunità viene raggiunta senza il ricorso a misure aggiuntive quali filtri
o soppressori. Al fine di assicurare il funzionamento corretto, occorre
seguire scrupolosamente le linee guida di cablaggio riportate nel
manuale del prodotto.
Tutti i componenti induttivi come i relè, i contattori, i freni elettromagnetici
ecc., correlati al convertitore, devono essere installati con la
soppressione appropriata, altrimenti l'immunità del convertitore può
essere superata.
Norma
Tipo di immunità
Specifica della prova
Applicazione
Livello
EN 61000-4-2*
Scariche
elettrostatiche
Scariche da 6 kV per contatto
Scariche da 8 kV in aria
Armadio del
modulo
Livello 3
(industriale)
IEC 801-3
Campo irradiato di
radiofrequenza
10 V/m prima della modulazione
27 - 1000 MHz
modulazione 80% AM (1 kHz)
(ridurre a 3 V/m per 87-108 MHz)
Armadio del
modulo
Livello 3
(industriale)
ENV 50140*
Campo irradiato di
radiofrequenza
10 V/m prima della modulazione
80 - 1000 MHz
modulazione 80% AM (1 kHz)
(ridurre a 3 V/m per 87-108 MHz)
Armadio del
modulo
Livello 3
(industriale)
ENV 50141*
Radiofrequenza
condotta
10 V prima della modulazione
0,15 - 80 MHz
modulazione 80% AM (1 kHz)
Linee di controllo
e di potenza
Livello 3
(industriale)
EN 61000-4-4*
Burst transitorio
veloce
transitorio da 5/50 ns 2 kV alla frequenza di
ripetizione di 5 kHz tramite protezione di
accoppiamento
Linee di controllo
Livello 4
(industriale,
severo)
transitorio da 5/50 ns 2 kV alla frequenza di
ripetizione di 5 kHz mediante iniezione
diretta
Linee di potenza
Livello 3
(industriale)
EN50082-1
Norma generale sull'immunità negli ambienti residenziali,
commerciali e dell'industria leggera
Conforme
EN50082-2
Norma generale sull'immunità negli ambienti industriali
Richiama le norma base contrassegnate da *
Conforme
EN61800-3
IEC61800-3
Norma di prodotto per sistemi elettrici di azionamento a velocità
variabile (requisiti di immunità)
106
www.controltechniques.com
Soddisfa i requisiti di immunità per il
primo e il secondo ambiente
Guida Mentor ll dell'utente
Versione numero: 13
12.3
Emissioni
Per l'installazione nel “secondo ambiente”, ovvero dove la rete di
alimentazione a bassa tensione non fornisce edifici ad uso abitativo,
non è richiesto alcun filtro al fine della conformità alla IEC61800-3
(EN61800-3).
Il funzionamento senza un filtro è una possibilità pratica ed
economicamente vantaggiosa in un'installazione industriale
dove è probabile che i livelli esistenti di disturbo elettrico
sino elevati e dove qualsiasi apparecchiatura elettronica in
funzione è stata progettata per tale ambiente. Vi è qualche
rischio di disturbo alle altre apparecchiature e in questo
caso l'utente e il fornitore del sistema di convertitore
devono assumersi la responsabilità congiunta di eliminare i
problemi che eventualmente si presentassero.
PRECAUZIONE
La Figura 12-1 mostra le linee guida di cablaggio per ottenere il livello
minimo di emissioni in un'installazione tipica. Quando è utilizzato con il
filtro raccomandato, il convertitore rispetta i limiti di emissioni condotte
imposti dalla norma generica sulle emissioni EN50081-2.
La lunghezza del cavo del motore non deve superare i 300 m al fine di
assicurare che il limite industriale sia rispettato con un margine adeguato.
I limiti per le emissioni condotte richiesti dalle norme generali sono
riepilogati nella tabella seguente:
Norma
Descrizione
EN50081-2
12.4
Campo di
frequenza
0,15-0,5 MHz
Norme
generali
sulle
0,5-5 MHz
emissioni
in ambienti
industriali
5-30 MHz
Limiti
Applicazione
79 dBµV quasi picco Linee di
alimen66 dBµV media
tazione
73 dBµV quasi picco
in c.a.
60 dBµV media
73 dBµV quasi picco
60 dBµV media
Filtri raccomandati
Metodo 1
Tecnica a basso costo che prevede l'impiego di condensatori a elevata
capacità fra le linee di alimentazione e la terra e che utilizza la
soppressione fornita dai reattori di linea standard. I valori dei componenti
sono indicati nella tabella seguente:
Convertitore
Reattori di Condensatori Resistori di Potenza
nominale
scarica
linea La, fra fasi e terra
Ca, Cb, Cc Ra, Rb, Rc resistori di
Lb, Lc
scarica (W)
(kΩ)
(µF)
(µH)
M25, M25R
200
4,7
470
0,5
M45, M45R
200
4,7
470
0,5
M75, M75R
100
10
220
0,5
M105, M105R
100
10
220
0,5
M155, M155R
75
13
150
1
M210, M210R
75
13
150
1
M350, M350R
35
29
68
3
M420, M420R
27
37
56
3
M550, M550R
25
40
56
3
M700, M700R
23
44
47
3
M825, M825R
19
53
39
4
M900, M900R
17
59
33
4
M1200, M1200R
13
77
27
6
M1850, M1850R
8,6
116
18
9
Guida Mentor ll dell'utente
Versione numero: 13
La Steatite Ltd produce un gruppo di condensatori a bassa induttanza,
con codice prodotto CON9020250, studiato per il montaggio diretto su
una sbarra di distribuzione. La capacità in questa scatola è di 10µF per
fase. Per ottenere la capacità richiesta, vari gruppi di questo tipo
possono essere utilizzati insieme. In considerazione della loro bassa
induttanza, si può impiegare il multiplo successivo di 10µF oltre il valore
richiesto.
La capacità totale fra le fasi e la terra deve essere entro +/-10% del
valore riportato nella tabella. Se si utilizzano reattori di linea con valore
inferiore, occorre allora aumentare in proporzione quello dai
condensatori. È importante che i condensatori abbiano un valore
nominale di 440 V c.a. e siano idonei per il collegamento ad
alimentazioni industriali normali. Essi devono inoltre essere progettati in
modo da avere una bassa induttanza in serie.
Per scaricare i condensatori quando l'alimentazione è scollegata
dall'installazione, si devono impiegare resistori con un opportuno valore
di taratura. I resistori indicati nella tabella sono calcolati per scaricare la
rete a meno di 60 V entro 5 s, supponendo un'alimentazione di 440 V.
La rete di condensatori determinerà lo scaricamento a terra di un'elevata
corrente di dispersione. La corrente di dispersione può essere calcolata
servendosi dell'espressione seguente, supponendo che l'alimentazione
trifase sia bilanciata rispetto alla terra e fra fase e fase:
IE = V × 2π × f × C × a
Dove:
V è la tensione fra fase e terra
f è la frequenza di alimentazione
C è la capacità fra fase e terra
a è la tolleranza del condensatore.
Esempio: convertitore M210 funzionante con un'alimentazione di
400 V 50 Hz
Nella Figura 12-1 sono mostrati due metodi per la soppressione delle
emissioni condotte nella linea di alimentazione del convertitore
principale a tiristori.
12.4.1
I condensatori devono essere cablati nel modo più simile possibile a un
collegamento ‘Kelvin’, riducendo al minimo la lunghezza del cablaggio
fra i condensatori stessi e il circuito di potenza.
Utilizzare 10µF + 4,7µF in parallelo = 14,7µF fra ogni fase e la terra
(13µF è il valore richiesto).
Selezionare una tolleranza del condensatore del 10%.
IE = 400 × 2π × 50 ×14,7 × 10-6 × 0,1
= 185 mA
In caso di perdita di una fase, la corrente di dispersione sarà maggiore.
Questa può essere calcolata applicando l'espressione seguente:
IEPL = VLE × 2π × f × C
= (400/√3) ×2π × 50 ×14,7 × 10-6
= 1,07 A
I condensatori sono causa di una forte corrente di
dispersione a terra. Deve essere fornito e regolarmente
provato un collegamento fisso di messa a terra.
AVVERTENZA
Se correnti di dispersione elevate non sono accettabili, allora occorre
utilizzare un filtro RFI al posto dei condensatori. Il filtro usa valori di
capacità più bassi, raggiungendo l'attenuazione necessaria mediante
induttanza.
107
www.controltechniques.com
12.4.2
Metodo 2
Filtro RFI con bassa corrente di dispersione a terra I filtri raccomandati
sono indicati nella tabella seguente:
Convertitore
•
Reattori di linea
La, Lb, Lc (µH)
M25, M25R
M45, M45R
M75, M75R
M105, M105R
M155, M155R
M210, M210R
M350, M350R
200
200
100
100
75
75
35
M420, M420R
M550, M550R
M700, M700R
M825, M825R
M900, M900R
M1200, M1200R
M1850, M1850R
27
25
23
19
17
13
8,6
Filtro RFI per convertitore principale
Potenza nominale (Veff)
Codice prodotto Control Techniques
50/60 Hz
4200 1051 o 6116
440
1051 o 6116
440
1071 o 6117
440
1111 o 6106
440
1171 o 6107
440
1171 o 6111
440
1301 o 6115
440
Codice prodotto Schaffner
500*
FN3359-400-99
FN3359-600-99
500*
FN3359-600-99
500*
FN3359-1000-99
500*
500*
FN3359-1000-99
FN3359-1000-99
500*
FN3359-1600-99
500*
È inoltre disponibile la versione da 690 V - aggiungere l'identificativo
HV dopo 3359 nel codice prodotto.
12.4.3
Filtro raccomandato per il regolatore di campo
Vi sono varie possibilità, in funzione della soppressione principale e di
come il convertitore è collegato al sistema.
1) Utilizzando il metodo 1 per il circuito principale, se la rete di
condensatori rimane sempre in circuito quando il regolatore di campo
viene messo sotto tensione, allora si possono utilizzare alcune
induttanze in radio frequenza a basso costo (LF1 e LF2) - vedere la
Figura 12-1
2) Utilizzando il metodo 1 o 2, se il regolatore di campo viene attivato
quando la soppressione principale non è collegata (non illustrata nella
Figura 12-1), allora è richiesto un filtro RFI separato. Il filtro può essere
utilizzato come alternativa alle induttanze in RF anche se il filtro
principale rimane sempre in circuito.
NOTA
N
I convertitori Mentor con corrente nominale oltre 210 A sono
generalmente alimentati con un ponte raddrizzatore per la fornitura di un
campo fisso. L'alimentazione di campo richiederà ancora un'azione di
filtraggio mediante l'uso di induttanze in RF o di un filtro separato
indicato nella tabella. Il controller di campo esterno FXM5, con valore
nominale di 20 A, può essere filtrato in modo simile mediante
componenti con taratura appropriata. Vedere la scheda tecnica EMC del
Mentor II.
12.5
Corrente nominale (Aeff)
a 50 oC
50
50
70 o 63
110 o 100
170 o 150
170 o 180
300
400
600
600
1000
1000
1000
1600
Emissioni irradiate
Quando è installato in un contenitore d'acciaio standard in conformità
alle Linee guida per l'installazione EMC, Figura 12-1 il convertitore
rispetta i limiti delle emissioni irradiate richiesti dalla norma generica
sulle emissioni industriali EN50081-2.
NOTA
N
La conformità è stata raggiunta eseguendo prove con contenitori
rappresentativi e attenendosi alle linee guida fornite. L'impegno è stato
massimo per assicurare che le configurazioni fossero sufficientemente
robuste e quindi efficaci nonostante le normali variazioni che hanno
luogo nelle installazioni reali. Non viene tuttavia fornita alcuna garanzia
che le installazioni costruite in base a queste linee guida rispetteranno
necessariamente gli stessi limiti di emissioni.
12.6
Costruzione del contenitore
Nella maggior parte delle installazioni, il convertitore Mentor sarà montato
in un contenitore protettivo metallico, che può essere provvisto di una
piastra interna di supporto per il montaggio di moduli VSD, di filtri RFI e di
apparecchiature ausiliarie. Può essere richiesta la schermatura del cavo
del motore; in tale caso, collegare a massa lo schermo sulla piastra di
supporto del contenitore come mostrato nella Figura 12-1. In alternativa,
lo schermo può essere collegato a massa sulla parete del contenitore nel
punto di ingresso del cavo servendosi di normali pressacavo.
In alcune esecuzioni, la parete del contenitore utilizzata per l'ingresso
del cavo può essere formata da pannelli separati. Il collegamento a
massa dello schermo del cavo del motore su queste superfici è
accettabile, a condizione che queste facciano un buon contatto elettrico
con la parte restante della struttura.
108
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
12.7
Selezione del cavo del motore
Quando si sottopone a prova il solo modulo del convertitore, occorre
specificare l'uso di un cavo schermato per il motore. Ciò è dovuto al fatto
che l'uscita del convertitore contiene energia in radiofrequenza prodotta
dalla commutazione dei tiristori. Al fine di soddisfare i requisiti delle
norme specificate, se il cavo non fosse schermato occorrerebbe allora
installare un filtro di uscita per ridurre la tensione in radiofrequenza nel
circuito del motore al livello previsto dalle norme. Questa situazione si
riscontra in tutti i convertitori c.c. di tutti i costruttori.
AVVERTENZA
AVVERTENZA
AVVERTENZA
Al proprietario o all'utilizzatore spetta la responsabilità di
assicurare che sia l'installazione del convertitore, sia il modo
in cui ne viene gestito il funzionamento e la manutenzione
siano conformi ai requisiti previsti dalla Legge sulle
condizioni di sicurezza e di igiene sul lavoro nel Regno Unito
e alla legislazione, regolamenti e codici di comportamento
pertinenti in vigore nel Regno Unito e in altri paesi.
Si impongono considerazioni speciali qualora il filtro debba
essere impiegato in apparecchiature mobili dove la massa è
collegata attraverso un cavo flessibile e una spina/presa.
Saranno richieste misure integrative come un collegamento
a massa supplementare o un monitoraggio della continuità
della massa.
La messa a massa di sicurezza (messa a terra) e il
cablaggio devono essere conformi alle norme e ai codici
locali in vigore. La messa a massa di sicurezza deve sempre
avere la precedenza sui requisiti della messa a massa EMC.
Guida Mentor ll dell'utente
Versione numero: 13
109
www.controltechniques.com
Figura 12-1 Linee guida per l'installazione EMC del convertitore
Mentor II (sono mostrati i collegamenti di campo per i
modelli dall'M25 all'M210)
Legenda dei simboli
Cavo monofase
Cavo trifase in c.a.
Cavo di massa
Connessione alternativa di massa
Ubicazione
alternativa
dei fusibili
I cavi delle fasi di alimentazione in c.a. e
di massa di ogni convertitore devono essere
posati paralleli e vicini gli uni agli altri.
Condensatori
fasi-massa e
resistori di scarica
Uscita 3
Cavi di
controllo ai
convertitori
Uscita 2
Uscita 1
0V
Reattori di linea
Vedere i
diagrammi
delle
connessioni
dei segnali
Sbarra 0V isolata
La sbarra deve essere
isolata dal contenitore
Massa
Controller
host
Induttanze in RF per il regolatore
di campo
In alternativa, si può utilizzare un
filtro RFI (mostrato di fronte)
Collegare a massa
la piastra di supporto
alla sbarra di
distribuzione della
massa d'alimentazione
L1
Alcune applicazioni
possono richiedere un
fusibile in c.c. nel circuito
dell'indotto. Vedere la
Guida Mentor dell'utente.
L2
L3
Convertitore
Scheda di
controllo
MDA 2B
Scheda
opzionale
MD29
A1
(4 poll.)
A2
Terminale di massa
di sicurezza
E1 E2
E3 F1+ F2-
(4 poll.)
Alimentazione
c.a.
Sezionatore
sistema
L1
L2
L3
Collegare a massa l'armatura o lo
schermo alla piastra di supporto.
Se la struttura del contenitore lo
consente, si può invece collegare a
massa l'armatura o lo schermo al
contenitore in corrispondenza
del punto di ingresso del cavo.
Vedere Emissioni irradiate
nella Scheda tecnica EMC.
Distribuzione
alimentazione e
fusibili in c.a.
Massa
Sbarra di distribuzione massa
di alimentazione
Non occorre che la sbarra sia
isolata dal contenitore
Inserire un anello di
ferrite Codice prodotto
3225-1004 attorno a tutti i
cavi di controllo collegati
alla scheda di controllo.
Piastra di
supporto
Contenitore
Collegamento a massa
di sicurezza al contenitore
Pozzetto di massa
(se richiesto)
In alternativa, si può
utilizzare un encoder
per la retroazione
della velocità.
Collegamenti a massa alternativi di sicurezza per il motore
Emissioni condotte provenienti dal convertitore principale a tiristori
soppresse mediante l'uso di condensatori fra fasi e terra e di reattori di
linea standard.
Per informazioni più dettagliate, vedere la scheda tecnica EMC del
Mentor II.
110
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Ubicazione alternativa
dei fusibili
Per informazioni su quanto segue,
vedere la scheda tecnica EMC:
Condensatori fra fasi e terra e
resistori di scarica
Reattori di linea
PE
Induttanze in RF per il
regolatore di campo
L1
Filtri RFI
Filtro RFI
LINEA
CARICO
L2
LINEA
E φ2 φ1
Netzfilter
L3
Reattori di linea
E φ2 φ1
CARICO
PE
L3
L2
L1
Induttanze in RF per il
regolatore di campo
In alternativa, si può utilizzare un
filtro RFI (mostrato di fronte)
(vedere la scheda tecnica EMC).
L1
Alcune applicazioni
possono richiedere
un fusibile in c.c.
nel circuito
dell'indotto.
Vedere la Guida
Mentor dell'utente.
L2
L3
Vedere i
diagrammi delle
connessioni
dei segnali
Convertitore
A1
Scheda
Scheda di opzionale
MD29
controllo
MDA 2B
Inserire un anello di ferrite
Codice prodotto 3225-1004
attorno a tutti i cavi di
controllo collegati alla
scheda di controllo
A2
(4 poll.)
Esempi di
collegamenti che
utilizzano un
connettore sulla
sbarra DIN
Terminale di massa
di sicurezza
E1 E2
Collegare a massa l'armatura o lo
schermo alla piastra di supporto.
Se la struttura del contenitore
lo consente, si può invece collegare
a massa l'armatura o lo schermo
al contenitore in corrispondenza
del punto di ingresso del cavo.
Vedere Emissioni irradiate nella
Scheda tecnica EMC.
E3 F1+ F2-
(4 poll.)
Piastra di supporto
Contenitore
Collegamenti a massa alternativi
di sicurezza per il motore
Guida Mentor ll dell'utente
Versione numero: 13
111
www.controltechniques.com
Indice analitico
Numerici
0-20 mA
20-0 mA
20-4 mA
4-20 mA
........................................................................... 63,
........................................................................... 63,
........................................................................... 63,
........................................................................... 63,
65
65
65
65
A
Abbassamento di tensione ............................................... 34, 51
ABILITAZIONE ........................................................................ 23
Abilitazione comunic. RS232 da convertitore a
convertitore ................................................................ 43, 81
Abilitazione logica di motore fermo .................................. 36, 58
Albero elettrico .....................................................29, 43, 78, 98
Algoritmo dell’anello di velocità PID ..........................................6
Alimentazione dell’encoder .............................................. 10, 26
Allarme (I x t) .................................................................... 41, 72
Allarme esterno .......................................................... 41, 74, 99
Allarme istantaneo ........................................................... 41, 72
Allarme processore 2 ..............................................................74
Altitudine .................................................................................10
Anello di posizione ................................................................104
Angolo d’innesco .................................. 8, 9, 36, 37, 56, 62, 99
ANSI ......................................................................................100
Arresto e ripartenza alla mancanza rete (alim. in c.a.) .... 42, 76
Attenzione .................................................................................7
Autotaratura continua ................................................. 28, 36, 59
Autotaratura dell’anello di corrente .................................... 6, 28
Avvertenza ................................................................................7
Avvolgimento centrale ...........................................................104
B
Burst transitorio veloce .........................................................106
C
Campo dati ............................................................................101
Campo irradiato di radiofrequenza ........................................106
Carattere di controllo
ACK ............................................................................... 101
BS .................................................................................. 101
ENQ ............................................................................... 101
EOT ............................................................................... 101
ETX ................................................................................ 101
NAK ............................................................................... 101
STX ................................................................................ 101
Carattere di controllo del blocco (BCC) ....................... 101, 102
Circuito interrotto dell’indotto ..................................................99
Codice di sicurezza .................................................................29
Codici di allarme
A29 ...................................................................................99
AOC .................................................................................99
AOP .................................................................................99
cL .....................................................................................99
EEF ..................................................................................99
EPS ..................................................................................99
Et ......................................................................................99
FbL ...................................................................................99
Fbr ....................................................................................99
FdL ...................................................................................99
FdO ..................................................................................99
FOC .................................................................................99
hF .....................................................................................99
It .......................................................................................99
Oh ....................................................................................99
Pc1 ...................................................................................99
Pc2 ...................................................................................99
PhS ..................................................................................99
PS ....................................................................................99
ScL ...................................................................................99
SL .....................................................................................99
th ......................................................................................99
Commutazione extra-sicura del ponte ............................. 36, 59
Compatibilità elettromagnetica (EMC) ............................. 7, 106
Compensazione caduta di tensione ........31, 34, 37, 49, 50, 60
Comunicazioni seriali RS485 ....................................................6
Configurazione a quattro quadranti ...........................................8
Configurazione riferita a massa ................................................8
Consenso marcia ............................................................. 23, 66
Controller di campo FXM5 ....................................................104
Controller di posizione ad asse unico ...................................104
Controllo adattativo .......................................................... 36, 58
Controllo diretto angolo d’innesco .................................... 37, 58
Coppia .......................................................................................8
Corrente d’indotto ......................................8, 26, 28, 54, 56, 60
Corrente di campo ............... 8, 12, 27, 31, 37, 60, 61, 99, 105
Costante del motore ......................................................... 36, 58
CTNet (MD29AN) ........................................................... 80, 104
D
DAC1 ................................................................... 23, 38, 63, 64
DAC2 ................................................................... 23, 38, 63, 64
DAC3 ................................................................... 23, 38, 63, 64
Dati
Invio ...............................................................................102
Lettura ............................................................................102
DeviceNet (MD25) .................................................................104
Diametri dei cavi ......................................................................11
Disabilitazione funzioni logiche normali ........................... 39, 67
Disabilitazione funzioni normali a LED ............................. 42, 76
Display ....................................................................................25
E
Economia di campo ....................................................27, 37,
Encoder (tachimetro a impulsi) ....................... 6, 24, 27, 28,
Errore di posizione ........................................................... 43,
Errore di velocità .............................................................. 34,
61
99
78
49
F
Filtri .......................................................................................107
112
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
Filtro RFI ...............................................................................108
Flusso di campo ........................................................................8
Forza controelettromotrice d’indotto ................................... 8, 60
Funzionamento a 12 impulsi
In parallelo ............................................................6, 36, 59
In serie ..................................................................6, 36, 59
Funzione di ABILITAZIONE ......................................................7
Funzione di STOP .....................................................................7
Generatore tachimetrico (tachimetro) .................... 6, 23, 51, 99
Guadagni integrali ...................................................................27
Guadagni proporzionali ...........................................................27
Guadagno derivativo in anello di velocità ......................... 34, 50
Guadagno in anello di posizione ...................................... 43, 78
Guadagno integrale continuo ........................................... 36, 57
Guadagno integrale discontinuo ...................................... 36, 57
Guadagno integrale in anello di velocità .......................... 34, 50
Guadagno proporzionale continuo ................................... 36, 57
Guadagno proporzionale in anello di velocità .................. 34, 49
Menu 06 - Controllo di campo ................................................ 37
Menu 07 - Ingressi e uscite analogici ..................................... 38
Menu 08 - Ingressi di logica .................................................... 39
Menu 09 - Uscite di stato ........................................................ 40
Menu 10 - Logica di stato e informazioni diagnostiche ........... 41
Menu 11 - Varie ...................................................................... 42
Menu 12 - Soglie programmabili ............................................. 42
Menu 13 - Albero elettrico ...................................................... 43
Menu 14 - Impostazione del sistema plus MD29 .................... 43
Menu 15 - Menu delle applicazioni 1 ...................................... 44
Menu 16 - Menu delle applicazioni 2 ...................................... 45
Menu definito dall’utente ........................................................... 6
Messa a terra ........................................................... 13, 18, 109
Mnemonica ............................................................................. 99
MODO .............................................................................. 30, 31
Modo di controllo avvolgitore/svolgitore ................................. 53
Modo di controllo della coppia con variazione della velocità .. 53
Modo seriale ................................................42, 44, 75, 83, 101
Montaggio a pannello passante .............................................. 15
Montaggio in superficie ........................................................... 15
I
N
I x t ................................................................................... 27, 99
Identificazione dei parametri .................................................101
Immunità ...............................................................................106
Impostazioni di default ..................................................... 30, 32
Indebolimento di campo ...............................................6, 27, 28
Indirizzamento globale ..........................................................103
Indirizzo seriale .............................................................. 75, 101
Indirizzo seriale ANSI ..............................................................80
Informazioni sulla sicurezza ......................................................7
Ingresso analogico .............. 23, 24, 32, 38, 63, 64, 65, 76, 94
Ingresso di corrente ......................................................... 38, 65
Ingresso digitale encoder ..........................................................6
Interblocco rif. zero .....................................................33, 47, 89
Interbus-S (MDIBS) ...............................................................104
Interfaccia delle comunicazioni seriali .............................. 6, 100
Inversione ..................................................................................8
NEMA ............................................................................... 10, 13
Nota .......................................................................................... 7
G
J
Jog avanti ............................................................ 23, 39, 66, 68
Jog inverso .......................................................... 23, 39, 66, 68
L
Larghezza di banda ...................................................................6
Limite di corrente ........................25, 26, 35, 41, 52, 54, 71, 76
Linearità dell’anello di corrente ..................................................6
M
Mantenimento della rampa ............................................... 33, 48
Marcia avanti .................................................................... 23, 66
Marcia inversa .................................................................. 23, 66
MD24 - PROFIBUS-DP ...........................................................84
MD25 - DeviceNet ...................................................................85
MD29 .............................................................................. 75, 104
MDA6 - alta tensione ...............................................................76
MD-IBS (INTERBUS) ..............................................................86
Menu .........................................................................................9
Menu 00 - Libreria utente ........................................................33
Menu 01 - Riferimento di velocità ............................................33
Menu 02 - Rampe di accelerazione e decelerazione ..............33
Menu 03 - Retroazione della velocità - selezione e anello
di velocità ..........................................................................34
Menu 04 - Corrente - selezione e limiti ....................................35
Menu 05 - Anello di corrente ...................................................36
Guida Mentor ll dell'utente
Versione numero: 13
O
Offset ......................................................................... 33, 46, 89
Orientamento del mandrino .................................................. 104
P
Parametri nascosti .............................................................. 6, 29
Parametri visibili ..................................................................... 29
Parametro di avviamento .................................................. 42, 75
Pendenza rastremazione di corrente 1 ............................. 35, 54
Pendenza rastremazione di corrente 2 ............................. 35, 55
Perdita di alimentazione ................................................... 72, 99
Perdita di campo .................................................. 41, 72, 74, 99
Perdita di retroazione .......................................... 41, 72, 74, 99
Perdita di una fase .................................................................. 72
Perdite .................................................................................... 12
Peso ....................................................................................... 11
PID ........................................................................................ 104
Ponte 1 ............................................. 25, 31, 35, 41, 52, 71, 76
Ponte 2 ............................................. 25, 31, 35, 41, 52, 71, 76
Procedure diagnostiche .......................................................... 99
Profibus-DP (MD24) ............................................................. 104
Programma DPL ............................................................... 80, 83
Protezione delle aperture .......................................... 10, 14, 18
Protocollo ANSI .............................................................. 75, 100
Punto di inizio rastremazione ........................................... 35, 52
Punto preimpostato forza controelettromotrice .......... 31, 37, 60
R
Radiofrequenza condotta ..................................................... 106
Rampa ad S .......................................................................... 104
Rampe .............................................................................. 29, 48
Reattori di linea ...................................................... 12, 107, 108
Regolatore di campo ............................................................ 108
Relè convertitore pronto ............................................ 23, 24, 57
Relè di stato ............................................................................ 21
RESET .................................................................................... 23
Resistenza d’indotto ............................................................... 60
Resistori di carico ...................................................... 21, 27, 59
Retroazione della corrente .......... 6, 21, 36, 37, 56, 59, 60, 61
Retroazione della velocità ..................................... 6, 27, 34, 49
113
www.controltechniques.com
Riduzione delle prestazioni .....................................................10
Riferimento di precisione ................................................. 43, 78
Riferimento di precisione di velocità ................................ 43, 79
Riferimento di velocità .................. 6, 23, 29, 33, 38, 46, 63, 64
Riferimento di velocità reale ............................................. 34, 51
Rilevamento della perdita di fase ..............................................6
Risoluzione della corrente .......................................................26
Risoluzione della velocità ..........................................................6
Rotazione fasi di ingresso .........................................................6
RS232 ...................................................................................100
RS422 ...................................................................................100
S
Salvataggio dei valori dei parametri ........................................28
Salvataggio in memoria flash ..................................................81
Scalatura della retroazione encoder ................................ 34, 50
Scariche elettrostatiche .........................................................106
Scatola I/O ............................................................................104
Schema per ritagliare e forare il pannello ...............................15
Selettore albero elettrico rigido ........................................ 43, 78
Sequenza delle fasi ...................................................................6
Serie di parametri ......................................................................9
Sicurezza
Livello 1 ......................................................................29, 31
Livello 2 ......................................................................29, 31
Livello 3 ......................................................................29, 31
Sistema del codice di sicurezza ................................................8
Sistema di sorveglianza (WDOG) .................................... 43, 80
Sistema di sorveglianza processore 1 ....................... 41, 73, 99
Sistema di sorveglianza processore 2 ....................... 41, 73, 99
Soglia di sovraccarico ...................................................... 36, 56
Soglia rastremazione di corrente 1 .................................. 35, 54
Soglia rastremazione di corrente 2 .................................. 35, 54
Soglie programmabili ................................................. 29, 42, 77
Soppressione di sovratensioni ................................................21
Sovraccarico prolungato .................................................. 41, 73
Sovracorrente d’indotto ...........................................................99
Sovratemperatura dissipatore di calore ..................... 41, 73, 99
Sovratemperatura motore ................................................ 41, 73
Standards
CSA C22.2 0.4-M1982 ....................................................... 5
CSA C22.2 0-M1982 .......................................................... 5
Direttiva 73/23/CEE sulla Bassa tensione ......................... 5
Direttiva 93/68/CEE sulla Marcatura CE ............................ 5
EN 61000-4-2 ................................................................ 106
EN 61000-4-4 ................................................................ 106
EN50082-1 ..................................................................... 106
EN50082-2 ..................................................................... 106
EN60249 ............................................................................ 5
EN60529 ............................................................................ 5
ENV 50140 .................................................................... 106
ENV 50141 .................................................................... 106
IEC 801-3 ....................................................................... 106
IEC326-1 ............................................................................ 5
IEC326-5 ............................................................................ 5
IEC326-6 ............................................................................ 5
IEC61800-3 .................................................................... 106
IEC664-1 ............................................................................ 5
UL94 .................................................................................. 5
Tensione d’indotto .......................................................................
6,10,26,27,28,31,34,41,49,50,51,57,60,71,72,105
Tensione di campo ....................................................................8
Tensione molto bassa di sicurezza (SELV) ..........................100
Termistore per il motore ..........................................................23
Tiristori (SCR) ...........................................................................6
U
Ubicazione ponticello J1 .........................................................61
Ultimo allarme .................................................................. 41, 73
Umidità ....................................................................................10
Uscita analogica .................................................. 23, 24, 63, 94
Uscita anello di velocità .................................................... 34, 49
Uscita relè ...............................................................................23
Uscite di stato ...................................................... 29, 40, 69, 96
V
Valori di default ................................................................ 27, 32
Valori l2t dei tiristori .................................................................11
Valori nominali dei fusibili ........................................................11
Varistori a semiconduttore metallo-ossido (MOV) ...................21
Velocità .....................................................................................8
Velocità base ................................................................8, 26, 60
Velocità di trasm. in baud ............................ 42, 43, 75, 80, 100
Velocità digitale .....................................................................104
Velocità zero .............................................8, 25, 34, 41, 51, 72
Ventilazione ...................................................................... 11, 14
Versione software processore 1 ....................................... 42, 75
Versione software processore 2 ..............................................42
T
Task CLOCK .................................................................... 43,
Tastiera .............................................................................. 8,
Temperatura ambiente .........................................10, 11, 13,
Temperatura dissipatore di calore ................................... 38,
80
25
14
63
114
www.controltechniques.com
Guida Mentor ll dell'utente
Versione numero: 13
0410-0017-13
Scaricare