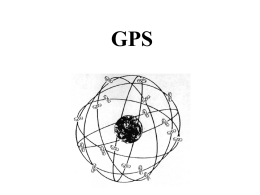
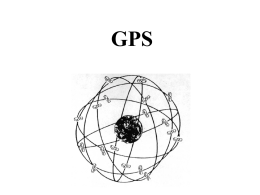
CENNI SUI PRINCIPALI APPARATI di RADIONAVIGAZIONE E METEO GPS Global Positioning System Il sistema GPS conosciuto anche con il nome NAVSTAR (Navigation Satellite Timing and Ranging) è stato realizzato ed attualmente gestito dal Dipartimento della Difesa statunitense negli anni ’70, sperimentato trà l’85 ed il ’90, è diventato operativo nel 1993. COMPOSIZIONE SISTEMA - Un segmento spaziale costituito da satelliti con il proprio sistema di propulsione per il posizionamento; - Un segmento spaziale costituito da una costellazione di 24 satelliti (non geostazionari); - Un segmento costituito dagli utilizzatori (utenti); COMPOSIZIONE SISTEMA - un segmento di comando e di controllo che comprende: - 5 stazioni di monitoraggio (MS) che rilevano i dati dei satelliti (pos. Orbitali, tempi degli orologi di bordo);- - Una stazione di controllo principale (Master control station - MCS) che valuta i dati delle MS ricalcolando le effemeridi dei satelliti, elaborando i messaggi e le manovre dei satelliti compresa la correzione degli orologi alla scala temporale GPS - 3 stazioni (delle cinque) per la trasmissione dei dati di modifica ai satelliti. M..S. MCS COSTELLA ZIONE SATELLITARE - Catena di 24 satelliti; - Disposti su 6 orbite circolari orbite inclinate di 55° rispetto all’equatore - Orbite sfalsate trà loro di 60°; - Quota 20183 Km. - Su ogni orbita abbiamo 4 satelliti. - N° 2 freq.: L1 = 1575.42 Mhz L2 = 1227.6 Mhz COSTELLA ZIONE SATELLITARE - Elevazione dei satelliti di almeno 7°-10° sopra l’orizzonte dell’utente; - - Ogni satellite trasmette con un particolare codice (ripetizione di segnali con una cadenza diversa per ogni satellite, e con una sequenza oraria esattissima; Orologi con una precisione di 10-13 (secondi/giorno), sincronizzati tra loro da stazioni di controllo ubicate a terra; PRINCIPIO DI FUNZIONAMENTO Tutti i satelliti sono dotati di proprie effemeridi (*), che trasmettono, sulle frequenze L1 – L2, insieme alle effemeridi di tutti gli altri satelliti della catena. (*) effemeridi = posizioni dei satelliti PRINCIPIO DI FUNZIONAMENTO - Misurazione, da parte del ricevitore, dei tempi impiegati dai segnali emessi dai satelliti; - Nota la posizione dei satelliti e la velocità, il ricevitore determina la distanza satellite/ricevitore; - L’utente si troverà su un luogo di posizione sferico di raggio pari alla distanza con centro satellite; PRINCIPIO DI FUNZIONAMENTO - I ricevitori, con un apposito software, riconoscono il satellite ricevuto, (ma per ottenere la voluta precisione, ne servono almeno tre); - Nota la posizione dei satelliti e la velocità dei segnali, il software determina la distanza che intercorre tra satellite/ricevitore; - il tutto trasformato il latitudine/longitudine, quota e velocità; PRINCIPIO DI FUNZIONAMENTO FIX - 2D (3 sat.) FIX - 3D (4 sat.) CODICI Un ricevitore può ricevere la frequenza L1, o ambedue L1 e L2. Il codice oltre ad avere una sua caratteristica che distingue il satellite, ha anche due codici detti pseuorandon: C/A P Course Aquisition che consente l’accesso al servizio di posizionamento standard (SPS) Precision che consente l’accesso al servizio di posizionamento preciso (PPS) riservato ad utenti limitati - MODALITÀ SPS - consente di ottenere dati di posizione molto accurati (16 – 40 m), ma il Dipartimento della Difesa americano ha introdotto una degradazione della qualità che consente, di ottenere dati della posizione nell’ordine di 100 metri. PPS - dati di posizione nell’ordine di (15 – 18 m) DGPS - consiste in una ulteriore riduzione del margine di errore mediante l’uso di tecniche differenziali con l’ausilio di dati forniti da una stazione terrestre o con i satelliti della catena INMARSAT (non ancora attivo). ERRORI Le cause degli errori del sistema sono principalmente errori di misura della determinazione del tempo di propagazione dei satelliti all’utente: - deriva dell’oscillatore del satellite; imprecisioni delle effemeridi e degli orologi del sat.; - attraversamento ionosfera (compensato parzialmente con rx contemporanea di L1 e L2) - disposizione geometrica, rispetto al ricevitore, della costellazione dei satellite espresso da un fattore denominato DOP (Dilution of Precision) Dilution of Precision ERRORE 60 m 45 m 30 m 15 m DOP 3 6 Scarsa GDOP = 3D + Tempo PDOP = 3D TDOP = UT HDOP = 2D VDOP = Quota 9 12 Ottima CLASSIFICAZIONE DEI RICEVITORI 1a categoria: “a sequenza lenta” Ricezione di L1 con codice C/A dotati di un solo canale con aggancio sequenziale dei satelliti, scalandoli ogni 1,2 secondi, con interrogazioni occasionali per raccogliere le effemeridi. In questo modo le distanze vengono raccolte ogni 5 secondi introducendo un margine di errore. Sono i meno complessi e i meno costosi, utilizzate dalle imbarcazioni da diporto o da utenti che non necessitano di un posizionamento particolarmente preciso. CLASSIFICAZIONE DEI RICEVITORI 2a categoria: “a sequenza veloce” Ricezione di L1 con codice C/A dotati di 2 canali. Un canale per l’effettuazione misurazione della distanza. continua della L’altro per la raccolta dei dati delle effemeridi con interrogazioni scalate ogni 0,05 secondi. CLASSIFICAZIONE DEI RICEVITORI 3a categoria: “ad agganciamento continuo” Ricezione di L1 e L2, con codice C/A e P dotati di 5 canali. Quattro sono continuamente agganciati sui segnali dei satelliti, effettuando misure simultanee, mentre il 5° canale per la raccolta dei dati relativi alle effemeridi dei satelliti. Con questi ricevitori si ottiene un alto grado di precisione in maniera continua ed istantanea. Impiegati su aerei, navi, e sommergibili militari. MODALITÀ DIFFERENZIALE RICEVITORI DGPS Utilizzando i dati GPS in modalità differenziale con l’impiego di particolari software è possibile ottenere le seguenti prestazioni: Rx. di 1a e 2a categoria 5 m vettori a bassa e a media dinamica. Rx. di 3a categoria 3 cm, con vettori a bassa dinamica. Rx. di 3a categoria 0,5 da punto fisso. Attualmente questa modalità è in fase di allestimento. GPS NavTracXL TrimbleNavigation NavTracXL GPS MENU 1 2 3 4 5 6 7 8 9 >> 0 PRESS MENU TO SIMULATE NavTracXL GPS ____ ____ Rev 2.00T (021093) (ID 3207a00105) DECCA OPTION INSTALLED ____ Trimble Navigation ____ ____ BRT POWER CON POS SETUP NAV WAYPT TIME ROUTE GPS SAVE APPARATO Commerciale NAVM06 MARCONI NAVM06 POSIZIONE UTC 10:51:27 INVIO 37° 12’ 33’’ N 17° 15’ 23’’ E SOG 010.8 KN EPE 15 m GPS/AUTO/SPS POS ACCESO SPENTO NAV LUM C.STO COG 070° ETE 100-1000 ns WGS84 0 WPT UOMO A MARE CFG LUCE INFO 1 2 3 4 5 6 7 8 9 . 0 CLR MENU AZZERAMENTO 00012 NAVM06 6 canali di acquisizione indipendente; 8 satelliti tracciati contemporaneamente; portanti ricevute L1 e L2 ; Sistema di elevatissima precisione, continuo e globale; Copertura sul piano orizzontale 360° Copertura sul piano verticale 180° Non necessita di nessun dato di avvio Codici C/A - P e Y; LL.CC. : AKAT “A” o “B” - (AKAT 1001)
Scaricare