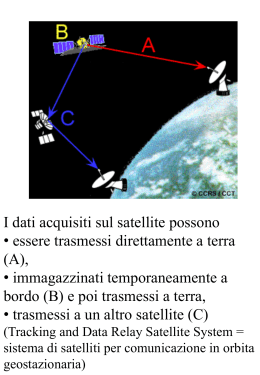
GPS Orbite ellittiche – leggi di Keplero (valide per masse a simmetria sferica – soddisfatte approssimativamente) a 3 kT 2 Terza legge di Keplero a T luna ~400000km ~29giorni satelliti geostazionari ~42000km 23h56’ (giorno sidereo) satelliti GPS ~26000km 11h58’ satelliti per telerilevamento ~7000km ~1h1/2 GNSS – Global Navigation Satellite System - GPS – Global Positioning System (USA) - GLONASS (Russia) - GALILEO (Unione Europea) Le 4 alternative pseudorange – differenze di fase point positioning – baselines (o punti con correzioni differenziali) statico - cinematico tempo reale – post-elaborazione pseudorange – differenze di fase segnale: portanti f 1500MHz 19cm f 1200MHz 24cm modulate da codice binario pseudo-casuale (non periodico) 0 1 portante lasciata invariata portante cambiata di segno frequenza Misura: f 1 10MHz sfasamento fra segnale in arrivo e copia del segnale prodotta dal ricevitore (nominalmente sincrono con quello del satellite) uso portante modulata da codice errore casuale di misura uso portante non modulata p c pseudorange (non periodica) tempo di percorrenza 30cm sfasamento (in frazioni di ciclo) 1 0.8 0.6 errore casuale di misura pochi mm (ma c’è l’incognita del numero intero di cicli) 0.4 0.2 0 -0.2 -0.4 -0.6 -0.8 -1 0 1 2 3 4 5 6 7 Misure di distanza stazione-satellite determinazione della posizione della stazione (3 coordinate spaziali) + sincronizzazione orologi della stazione e del satellite osservazioni di almeno 4 satelliti per ogni acquisizione tempo di percorrenza satellite-ricevitore c velocità della luce In una sessione di misure acquisizioni discrete a intervalli regolari da 1 sec stazione in movimento cinematico fino a 30 sec stazione fissa statico coordinate diverse ad ogni acquisizione sempre le stesse coordinate per tutte le acquisizioni NOTA: Nelle misure di differenza di fase durante una sessione (ricevitore acceso e collegato con il satellite) si tiene memoria della variazione del numero intero di cicli l’incognita è una sola per ogni satellite (ambiguità iniziale) per tutte le acquisizioni di una sessione se c’è un’interruzione del collegamento (cycle slip) Bisogna introdurre una nuova incognita Errori sistematici • errore di orologio del ricevitore cancellato nelle differenze di distanza 1 stazione – 2 satelliti • errori atmosferici significativamente ridotti nelle differenze di distanza 2 stazioni (vicine) – 1 satellite Osservazioni di differenze doppie 2 stazioni – 2 satelliti • determinazioni molto imprecise della posizione puntuale • determinazioni accurate di baselines (vettori congiungenti 2 stazioni P e Q) per determinare la posizione di Q bisogna conoscere la posizione di P Punti noti IGM95 rete nazionale (distanza 1200 vertici 20km) raffittimenti regionali (distanza 7km) capisaldi da occupare con ricevitori Stazioni permanenti ricevitori sempre accesi dati acquisibili per via telematica (reti regionali – distanza: qualche decina di km) Oppure…. GPS differenziale posizionamento puntuale con correzioni degli errori atmosferici fornite da stazioni permanenti vicine o da reti di stazioni permanenti - in post-elaborazione dati della stazione permanente scaricati nel computer ed elaborati insieme con quelli acquisiti dal ricevitore dell’utente - in tempo reale collegamento telematico (ad es. con cellulare) fra il ricevitore e la stazione permanente RTK: Real Time Kinematic
Scaricare