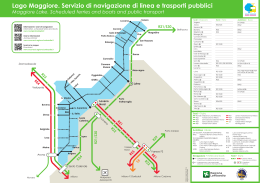
ANALISI CINEMATICA E DINAMICA DI UN MANIPOLATORE PARALLELO 3-UPU Studente: Christopher Niccolò Adami Docente relatore: Giovanni Boschetti Anno accademico 2010-2011 Definizione di robot • Cinematica parallela versus cinematica seriale: vantaggi e svantaggi • Problematiche dell’architettura parallela • Origine ed evoluzione dei manipolatori paralleli e le applicazioni Il mondo della ricerca attuale ed i manipolatori paralleli • Robot impiegati nei microscopi e telescopi • Applicazioni mediche • Progetto di un robot posizionatore di fibre ottiche • TPM Robot manipolatore parallelo 3-UPU • 3-UPU only translation • Caratteristiche strutturali • Evoluzione verso il 3UPU • Proprietà del 3-UPU di sola traslazione e singolarità 3 . . . s 11 s 12 s 51 s 52 ω p 1i s1i 2i s 2i 4i s 4i 5i s5i s 11 s 13 s 51 s 53 i 1 s 12 s 13 s 52 s 53 3-UPU wrist Analisi cinematica di velocità . • Ipotesi di base L1 • Analisi v1 Gp . . . vi A B 1 u i uv i Gp L2 Gp Hp q C ω1 . . L1 . L3 uv i H p v1 . ω ij L ij q • Effetto trasmesso dal link i-esimo sugli altri link. v2 v3 ω1 v1 ω2 v2 ω3 v3 h1 h2 h3 vers (CB ) vers ( AC ) vers ( AB ) • Effetto trasmesso dal link i-esimo sui centri di massa del link stesso. . . ua i Li vi vt i . vi Li ut i . vi Li vt i ( v i ut i ) ut i C ua i L i . ua i L i ω is B vt i Li • Caso particolare . • Il giunto prismatico rende inutile specificare il secondo pedice. GP Li Gi2 ua i A ω ω L1 j ω1s ω2 ω3 L2 j 1 ω2s ω3 1 ω2 ω3s L3 j Gi1 ω i1 ω i 2 ua i . . G ij Hij q . L1 v1 r21 vt 1 • Effetto dell’allungamento del link i-esimo sui centri di massa degli altri link. C v 21 r21 v1 L2 r31 v 31 r31 v1 L3 A ua1 B • Effetto dell’allungamento del link i-esimo sul centro di massa del link stesso. v it v is ω is ri1 v i2s v i 2 s ω is ri 2 . Li v is ω is v it v i 2 s u i Gi 2 G i1 ri1 v v H11 v1s v12 v13 H 21 v 2s v 23 H 31 21 31 v 32 v 3s Matrici di Rotazione R21 R z ( ) R y (β ) R x (α ) Metodo di Cardano: • La seconda rotazione (β su Y’) deve portare l’asse X’ su X2; • La terza rotazione (α su X’’=X2) deve allineare gli assi Y e Z della terna corrente con quelli della terna finale (2). S2 i2 S1 k1 k2 j2 j1 C A i arccos(ub i vers(hb i )) i1 K12 βi AB AC AB AC u ua i ub i u ua i u ub i βi H ua i i K12 u hb i C k2 Li i2 j2 i ui A B H hb i i 2 i i arccos(ui vers(hb i )) B Analisi cinematica di accelerazione . . .. Gp Hp q a ang . . .. G p H p q H p q . Hp a cor ar ac a i is L i . H p a1 .. 1 1 uv i ut i 2ω is u i Li u i uv i a2 . a3 . .. G i1 H i1 q H i1 q Gp • Effetto sugli altri link. .. L1 ac . r31 L1 H a ang r21 . H i1 a i1 j j (ri1 vers(h j )) vers(h j ) 1 ri1 vers(h j ) 1 u j uv j • Effetto sul link stesso. a ang ac a i1i is ri1 . H 11 a111 . G i1 H 21 a112 . H 31 a113 1 1 uv i ut i Li u i uv i a 211 a 311 a 212 a 312 a 213 a 313 . Hi2 a ang a cor a i 2i .. ac . 1 1 is ri 2 uv i ut i 2ω i vers(L i ) Li u i uv i L1 Gi 2 . H 12 a121 . a H 22 a122 . H 32 123 a 221 a 321 a 222 a 322 a 223 a 323 Analisi dinamica .. • Il metodo utilizzato è l’approccio Newtoniano. Gp . . . q Gp .. Gp .. q Hp . . Gp Hp q Hp F3 FTOT meq (x)a F1 C F2 .. 3 2 .. . A k ij .. i α i L i H i1 q 0 1 2 Lij 3 0 0 0 1 2 rij 2 G ij . Gp B I ij 2 i 1 j 1 FTOT (m G p mij G ij k ij α i I ij k ij ) i 1 j 1 1 2 3 Lij mij 0 0 3 i Li Li . kij H ij q . H ij H p1 Hp q α i i ua i Fatt H p FTOT T 3 3 N m p H p H p [mij H ij H ij L ij I bijL ij ] GIMRE T T T i 1 j 1 • Impiego delle matrici di rotazione • Caratteristiche della GIMRE I bij R 21I ij R 21 T • Indici di prestazione dinamica 25 1 25 0.9 0.8 20 20 0.8 0.7 15 0.6 0.7 15 0.6 10 0.5 5 10 10 0.5 0.4 0.4 5 0.3 10 0.3 0 0 -10 -10 -5 0 27( x1 x2 x3 ) D1 ( x1 x2 x3 ) 3 5 10 0.2 -10 -10 D2 -5 0 3 x1 x2 x3 5 10 0.2 I limiti dell’analisi proposta: giochi ai giunti ed attrito
Scaricare