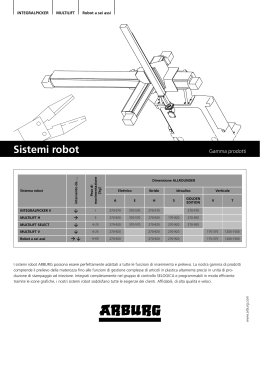
Prof. Gino Dini – Università di Pisa Manipolatore riprogrammabile, multifunzionale, progettato per muovere materiali, utensili o attrezzi speciali, attraverso movimenti programmati per seguire traiettorie anche complesse Braccio Gomito Spalla Polso Basamento Corpo Robot cilindrico Robot polare Robot cartesiano Robot a portale Robot articolato Robot SCARA Robot a struttura ibrida Robot a cinematica parallela Articolato SCARA Velocità: 1,6 m/s (rettilineo) 1,0 m/s (curva) Ripetibilità: ± 0,25 mm Tempo di start-up: meno di 3 sec b1 a1 b1 a2 b1 a1 b2 a1 b2 a2
Scaricare