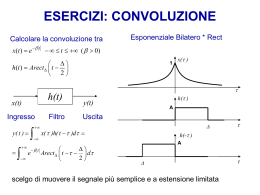
Elaborazione e trasmissione delle immagini Esercitazione n.4 Pisa, 20/10/2004 Anno Accademico 2004-2005 Argomenti trattati 1. Trasformata di segnali spazio discreti e serie discreta 2. Ricostruzione del segnale dalla sola ampiezza o dalla sola fase 3. Filtraggio nel dominio delle frequenze spaziali 4. Operatori derivata Trasformata di Fourier segnali spazio-discreti non periodici M 1 N 1 ~ F ( X , Y ) f [m, n]e j 2 [ mX nY ] m 0 n 0 1 f [m, n] 2 1 2 ~ j 2 [ mX nY ] dXdY F ( X , Y )e 1 1 2 2 Serie discreta di Fourier di segnali spazio-discreti periodici M 1 N 1 ~ ~ j 2 [ mr nNs ] M F [r , s ] f [m, n]e m 0 n 0 ~ 1 f [m, n] MN M 1 N 1 ~ j 2 [ mr nNs ] M F[r , s]e r 0 s 0 Relazione tra coefficienti della serie discreta e trasformata ~ ~ r s F [r , s] F ( M , N ) Serie discreta ~ 1 f [m, n] MN M 1 N 1 ~ j 2 [ mr ns ] M N F[r , s]e r 0 s 0 M 1 N 1 1 ~ r s j 2 [ mrM nsN ] F ( M , N )e r 0 s 0 MN Ricostruzione dal solo spettro di ampiezza o dal solo spettro di fase ~ r s ~ r s j~ ( Mr , Ns ) F(M , N ) F(M , N ) e Spettro di ampiezza Spettro di fase ~ r s F(M , N ) ~ r s ( M , N ) Convoluzione lineare g[m, n] f [m, n] h[m, n] g[m, n] f [r , s ]h[m r , n s ] r s Convoluzione circolare (per estensioni periodiche di funzioni o sequenze) ~ ~ ~ g [m, n] f [m, n] h [m, n] M 1 N 1 ~ ~ g~[m, n] f [r , s ]h [m r , n s ] r 0 s 0 Teorema della convoluzione circolare Segnali spazio-discreti aperiodici ~ ~ ~ g[m, n] f [m, n] h[m, n] G ( X , Y ) F ( X , Y ) H ( X , Y ) Segnali spazio-discreti periodici ~ ~ ~ ~ ~ ~ g [m, n] f [m, n] h [m, n] G[r , s] F [r , s] H [r , s] M M f M h 1 N N f Nh 1 g[m, n] g~[m, n] m 0,1, , M f M h 2 n 0,1,, N f N h 2 Prodotto di convoluzione lineare g[m, n] f [r , s ]h[m r , n s ] r s ~ r s ~ r s ~ r s g[m, n] f [m, n] h[m, n] G( M , N ) F ( M , N ) H ( M , N ) M M f M h 1 m 0,1, , M f M h 2 N N f Nh 1 n 0,1, , N f N h 2 M 1 N 1 ~ r s j 2 [ mrM nNs ] g[m, n] G ( M , N )e r 0 s 0 Segnale cosinusoidale diretto lungo x m f [m, n] cos( 2 ) L L=64 periodo dell’oscillazione X0=1/L=1/64 frequenza spaziale dell’oscillazione Ricostruzione dal solo spettro di ampiezza o dal solo spettro di fase M 1N 1 ns ] 1 ~ r s j 2 [ mr ~ M N f A[m, n] F(M , N ) e r 0 s 0 MN M 1N 1 ns ] 1 j~ ( Mr , Ns ) j 2 [ mr ~ M N f [m, n] e e r 0 s 0 MN Filtraggio nel dominio spaziale: filtro a finestra mobile g[m, n] f [m, n] h[m, n] f [m, n] h[m, n] 1 1 1 h[m, n] 1 25 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Convoluzione lineare: conv, conv2 in MATLAB f(n), Mf = 5 0 1 h(n), Mh = 2 0 2 2 1 1 ‘full’, Mf + Mh - 1 2 ‘same’, Mf ‘valid’, Mf - Mh + 1 Filtraggio nel dominio delle frequenze spaziali: filtro ideale f [m, n] g[m, n] h[m, n] Nel dominio trasformato il filtro mantiene solo una parte dei coefficienti della trasformata e pone a zero i restanti ~ r s ~ r s ~ r s G( M , N ) F ( M , N ) H ( M , N ) ~ r s F( M , N ) ~ r s H(M , N ) ~ r s G( M , N ) 1 In banda ~ r s H(M , N ) 0 Altrove Filtraggio nel dominio delle frequenze spaziali: filtro ideale bassa-basso Filtro passa-basso Y +1 1 2 N campioni 0 Y 1 2 +1 X M campioni 1 2 X 1 2 M campioni fftshift in MATLAB Dimensioni immagini prodotto di convoluzione lineare MfxNf MhxNh (Mf+Mh-1)x(Nf+Nh-1) Prodotto di convoluzione circolare con trasformate serie di dimensioni MfxNf MfxNf MhxNh (Mf)x(Nf) Filtraggio nel dominio delle frequenze spaziali: filtro ideale passa-alto Filtro passa-alto Y +1 0 +1 X ~ r s ~ r s HHP( M , N ) 1 HLP( M , N ) Y 1 2 1 2 1 2 X 1 2 ~ ~ h HP(m, n) [m, n] h LP[m, n] Filtraggio nel dominio delle frequenze spaziali: filtro ideale a simmetria circolare Y 1 2 1 2 Segnali spazio-continui a simmetria circolare hanno trasformata a simmetria circolare 1 2 1 2 X Filtraggio nel dominio delle frequenze spaziali: filtro a maschera zonale Filtro passa-banda Y Y +1 0 +1 X 1 2 1 2 1 2 1 2 X Derivate parziali: approssimazione con rapporto incrementale f x, y f x , y x f x, y f x, y y Differenze finite m m, n f m 1, n f m, n f m, n m 1, n m, n n m, n f m, n 1 f m, n f m, n m, n 1 m, n
Scaricare