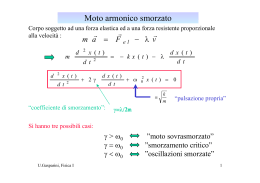
ELEMENTI DI DINAMICA DELLE STRUTTURE analisi dinamica strutturale: determinazione degli spostamenti, delle tensioni e delle deformazioni in una struttura soggetta ad un carico dinamico dinamico: variabile nel tempo carico dinamico: carico la cui intensità, direzione o posizione varia nel tempo. risposta strutturale ad un carico dinamico (deformazioni e tensioni risultanti): varia nel tempo - perciò è dinamica. Caratteristiche essenziali di un problema dinamico carico applicato staticamente: le sollecitazioni e la deformata dipendono direttamente dal carico applicato e possono essere valutate dalle condizioni di equilibrio di forze. carico applicato dinamicamente: spostamenti variabili nel tempo accelerazioni forze d'inerzia P P(t) forze d'inerzia Le sollecitazioni interne devono equilibrare il carico esterno e le forze d'inerzia forze d'inerzia: caratteristica più importante che distingue il problema dinamico. forze d'inerzia significative: occorre tener conto del carattere dinamico del problema. moto lento forze d'inerzia trascurabili: analisi della risposta con i metodi della statica. Nel sistema dinamico, spostamenti strutturali forze d'inerzia spostamenti: problema in termini di equazioni differenziali. conoscere la risposta dinamica di una struttura significa conoscere in ogni istante del moto la posizione nello spazio di ogni massa che compone la struttura GRADI DI LIBERTÀ DINAMICI della struttura "g.d.l." (degrees of freedom "DOF"): numero di componenti di spostamento indipendenti che devono essere considerate per determinare la posizione nello spazio di tutte le masse del sistema in qualsiasi istante del suo movimento i sistemi reali sono caratterizzati da massa distribuita nel volume: quindi hanno un numero infinito di gradi di libertà di solito la struttura reale può essere schematizzata con una struttura più semplice, modello, che ne descriva in modo sufficientemente accurato la risposta dinamica a fronte di un ragionevole onere di calcolo M h M m m<<M h m mi sistema a masse concentrate: si considerano tutte le masse concentrate in un numero finito di punti; il resto della struttura è privo di massa e conserva le caratteristiche di deformabilità. P(t) m1 m2 m3 f f f I1 I2 I3 Le forze d'inerzia si sviluppano solo in questi punti: è sufficiente determinare spostamenti ed accelerazioni di questi punti per descrivere compiutamente il moto di tutto il sistema. ANALISI SISMICA DI STRUTTURE CON COMPORTAMENTO ELASTICO - LINEARE SISTEMI AD UN GRADO DI LIBERTA' SDOF posizione di equilibrio statico x(t)=0 k m x(t) F(t) c massa m: rappresenta le caratteristiche inerziali e di massa della struttura molla k: rappresenta la forza elastica di richiamo e l'energia potenziale della struttura. smorzatore c: rappresenta le caratteristiche di attrito e le perdite di energia della struttura forza di eccitazione F(t): rappresenta le forze esterne che agiscono sul sistema nel tempo. molla k: se si considerano sistemi a comportamento indefinitamente lineareelastico, k è costante, non dipende da x caratteristiche di smorzamento: • smorzamento viscoso esterno: causato dall'aria o dall'acqua intorno alla struttura. E' molto piccolo • smorzamento viscoso interno: associato alla viscosità del materiale. E' proporzionale alla velocità • smorzamento per attrito: si verifica per l'attrito fra i vari elementi di una struttura nei punti di connessione. E' costante, ma per spostamenti piccoli viene trattato come smorzamento viscoso; per spostamenti grandi viene inglobato nello smorzamento isteretico • smorzamento per isteresi: ha luogo quando la struttura è sottoposta a carico ciclico in campo non elastico nei sistemi a comportamento indefinitamente lineare, si considera solo lo smorzamento di tipo viscoso (proporzionale alla velocità) m x k=EA/L L L k=48 EJ/L 3 m x x x m m 3 k=3EJ/h h h k=2*12EJ/h 3 VIBRAZIONI LIBERE - SISTEMA NON SMORZATO Schema di equilibrio: posizione di equilibrio statico x(t)=0 k m kx mg .. mx N x(t) sistema spostato dalla posizione di equilibrio statico e lasciato libero equilibrio dinamico direzione x: mx kx 0 Risposta del sistema: moto armonico x02 C x 2 2 0 k m x C cost x0 tg x0 ampiezza pulsazione naturale del sistema T 2 fase periodo proprio x(t) x0 x0 t T =2 / VIBRAZIONI LIBERE - SISTEMA SMORZATO posizione di equilibrio statico x(t)=0 k m c equaz. del moto: x(t) kx . cx mg .. mx N mxt cxt kxt 0 c ccr 1° caso: sistema con smorzamento critico 2k ccr 2 km 2m x(t) . yt C1 C 2 t e ccr t 2 m x0 moto non periodico x0 t Smorzamento Critico: per un dato sistema (m e k dati) è il più piccolo valore dello smorzamento per il quale non si hanno oscillazioni libere. 2° caso: sistema ipersmorzato c ccr L'espressione sotto radice è > 0 Il moto è non periodico come nel 1° caso ma il tempo per tornare alla posizione neutra è più lungo. radici dell'equazione caratteristica complesse coniugate: 2 p1 c k c i p2 2m m 2m soluzione generale del sistema sottosmorzato: xt C1e e 2cm t c 2 m i i C1e k c 2 m 2m k c 2 m 2m t t C2 e C2 e c 2 m i i k c 2 m 2m k c 2 m 2m t t 3° caso: sistema sottosmorzato equazione del moto: xt e c ccr c t 2m A cos Dt B sin Dt parte reale A = C1 C2 D k c m 2m D 1 2 parte immaginari a B= i(C1 C2 ) 2 frequenza smorzata del sistema c rapporto di smorzamento 1 del sistema ccr Risposta di un sistema libero sottosmorzato xt Cet cosDt x0 x0 condizioni iniziali: C 2 x x x2 0 0 0 x 0 x0 x0 x0 tan D x0 2D x(t) Ce - t x0 t T D =2 /D moto oscillatorio ma non periodico: l'ampiezza non è costante, ma le oscillazioni si verificano ad intervalli uguali di tempo: TD 2 D 2 1 2 Per le strutture reali perciò al max periodo smorzato c 0. 02 0. 20 ccr circa D 0. 98 In pratica la frequenza naturale può essere considerata uguale alla frequenza naturale non smorzata. 0.02 x(t) 0.05 0.10 0.20 x0 t TD L'ampiezza del moto si riduce tanto più rapidamente quanto maggiore è lo smorzamento Determinazione sperimentale della frequenza propria e dello smorzamento: 1 - METODO DELLE OSCILLAZIONI LIBERE Si provoca una vibrazione libera e si registra il movimento oscillatorio. x(t) Ce - t picco 1 x1 picco 2 x2 TD t Dal grafico che si ottiene, la distanza fra due picchi fornisce il periodo proprio, TD , da cui si ricava D . La diminuzione dell'ampiezza del moto permette di valutare Misurati x1 e x2 (valori di due picchi successivi) si calcola: x1 ln x2 da decremento logaritmico xt Cet cosDt x1 Cet1 per t1 e t2=t1+TD x2 Cet1 TD x1 Ce t1 2 2 ln ln t1 TD TD 2 2 x2 Ce D 1 misurato sperimentalmente , si può valutare: 2
Scaricare