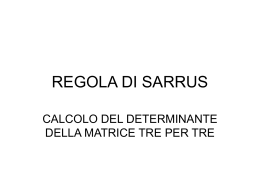
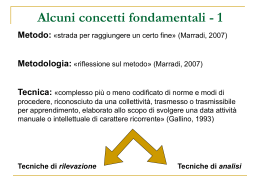
Parte II Misure Dinamiche delle Strutture Aeronautiche e Spaziali 136 Capitolo 7 Modelli Matematici nella Dinamica Strutturale 7.1 Descrizioni della dinamica di una struttura Nel caso generale il modello dinamico di una struttura è dato da un sistema a più gradi di libertà; questo modello rappresenta comunque una approssimazione della situazione effettiva che è quella di una struttura continua e quindi caratterizzata da un numero infinito di gradi di libertà; per un sistema a più gradi di libertà si ha:1 Mẍ + Cẋ + Kx = f (t) (7.1) dove x è un vettore, ad n componenti, che comprende i gradi di libertà scelti per la rappresentazione della struttura (dal punto di vista sperimentale possono essere i punti di misura), f (t) è il vettore delle forze agenti sulla struttura, M è la matrice, n × n, di massa ed analogamente C e K sono le matrici, sempre n × n, di smorzamento viscoso e di rigidezza. Il modello definito dalla 7.1 è il modello spaziale costituito dalle matrici di massa, smorzamento e di rigidezza, ed è normalmente costruito tramite un procedimento numerico (ad es. con l’impiego del metodo agli elementi finiti) e non è quindi generalmente accessibile tramite l’approccio sperimentale. Dallo studio della vibrazione libera, che si può ottenere numericamente determinando gli autovalori ed autovettori del sistema 7.1 (con f (t) nullo), o dalla sperimentazione, si possono ottenere n pulsazioni naturali, ωnn , n coefficienti di smorzamento, ζn , ed n deformate modali, φ(n) ; queste 2 ωn1 h i ωn2 2 (1) (2) (n) 2 matrici di autovettori, Φ = φ |φ |, ..., φ e di autovalori Ω = . .. ωn2 n costituiscono invece il modello modale. 1 Nel seguito si rappresenteranno le matrici in caratteri grassetto maiuscolo ed i vettori in caratteri grassetto minuscolo. 137 Si osserva che da un punto di vista sperimentale esistono forti limitazioni sulla possibilità di ottenere un numero elevato di modi fondamentali di una struttura ed anche sulla possibilità di condurre la misura su di un numero molto elevato di punti di misura. Dalla determinazione delle funzioni di risposta in frequenza della struttura si determina il modello di risposta in frequenza ; questo viene direttamente ricavato dall’approccio sperimentale ormai classico nell’analisi modale e può comunque essere ricavato anche dall’approccio numerico. In sintesi quindi si possono definire tre diversi modelli per lo studio della dinamica di una struttura: • spaziale • modale • delle funzioni di risposta in frequenza Essi costituiscono naturalmente dei modi diversi, ma equivalenti, per rappresentare il comportamento dinamico di una struttura e possono essere determinati in via numerica o sperimentale. Anche il confronto tra i risultati numerici e quelli ottenuti dalla sperimentazione può essere condotto sulla base di questi modelli. 7.2 Modello ad un solo grado di libertà - SDOF Il modello ad un solo grado di libertà (Single Degree Of Freedom) non può rappresentare il comportamento di un elemento strutturale, ma le sue caratteristiche sono importanti poichè da esse si sviluppano quelle del modello a più gradi di libertà. Si consideri il sistema caratterizzato da una massa, m, ed una molla di rigidezza k (modello non smorzato). • L’equazione del moto nel caso di vibrazione libera è: mẍ + k x = 0 (7.2) Se si considera l’equazione caratteristica della precedente, ovvero si cercano soluzioni del tipo: x(t) = x∗ est si ha: (7.3) s (s2 m + k) = 0 −→ 138 s1,2 = ±j k = ±jωn m (7.4) e si ha allora una risposta libera del tipo x(t) = c1 es1 t + c2 es2 t = x0 cos(ωn t) + ωẋn0 sin(ωn t). Quindi il “modello modale” consiste in questo caso in un modo di vibrazione la cui pulsazione naturale è data da: q ωn = k/m (7.5) e la deformata modale è data da una costante. • Nel caso di vibrazione forzata si considera una funzione di ingresso f (t) di tipo armonico con pulsazione ω scritta:2 f (t) = f ∗ ejωt (7.6) x(t) = x∗ ejωt (7.7) (−ω 2 m + k)x∗ ejωt = f ∗ ejωt (7.8) Se si pone pure per la soluzione: si ha: da cui la funzione di risposta in frequenza: x∗ 1 = H(ω) = ∗ f k − ω2m (7.9) che può interpretarsi come il rapporto tra spostamento e forza di ingresso di tipo armonico e rappresenta quindi una flessibilità dinamica indicata anche come recettanza o ammettenza; si nota che la funzione di risposta H(ω) non dipende in realtà dal tipo di funzione di ingresso e costituisce quindi una caratteristica intrinseca del sistema. Si ottiene quindi il modulo della H(ω): 1 (k − ω 2 m)2 |H(ω)| = p (7.10) Si considera ora anche la presenza di un termine smorzante di tipo viscoso con coefficiente di smorzamento c. • L’equazione del moto, per la vibrazione libera è : mẍ + cẋ + kx = 0 2 (7.11) Si osserva che se pure la Eq. 7.6 è in realta un’espressione in campo complesso, poichè Re(f ∗ ejωt ) = f ∗ cos(ωt) e Im(f ∗ ejωt ) = f ∗ sin(ωt) ed il sistema in oggetto è lineare, allora se si considerasse rispettivamente la parte reale o la parte immaginaria dell’uscita (Eq. 7.7) si otterrebbe rispettivamente la risposta (in campo reale) a regime permanente all’ingresso f ∗ cos(ωt) e all’ingresso f ∗ sin(ωt). 139 si pone per la ricerca degli esponenti caratteristici: x(t) = x∗ est (7.12) ms2 + cs + k = 0 (7.13) e si ha: da cui: q s1,2 = −ωn ζ ± iωn 1 − ζ 2 (7.14) avendo posto: ωn2 = k m ζ = c c = √ c0 2 km (7.15) si ottiene quindi una soluzione del tipo: 0 0 x(t) = c1 es1 t + c2 es2 t = c1 e−σt ejωn t + c2 e−σt e−jωn t (7.16) cioè un modo di vibrazione con una frequenza naturale complessa caratterizzata da una parte immaginaria q ωn0 = ωn 1 − ζ 2 (7.17) σ = ωn ζ (7.18) e una parte reale Si osserva come, per effetto del termine smorzante, si ha una pulsazione ωn0 che è diversa da quella, ωn , del sistema non smorzato anche se, per elementi strutturali di uso aerospaziale (nel caso a più gradi di libertà), la differenza in termini numerici è molto limitata in quanto i valori dei coefficienti adimensionali di smorzamento sono molto limitati, tipicamente dell’ordine del per cento o più bassi. Si consideri ora un velivolo dell’aviazione generale rappresentato da un modello SDOF e con una massa m = 2000 Kg in condizioni di decollo con il solo pilota, mentre nella configurazione di peso massimo al decollo ha massa m∗ = 3000 Kg, lo spostamento del sistema elastico del carrello in condizioni di carico con il solo pilota è stato misurato in x = 0.045 m. Se si impone che il sistema lavori con un valore del coefficiente di smorzamento ζ = 0.9,3 si valuti il valore del coefficiente di smorzamento viscoso, c. Nel caso statico si ha K x = f e quindi si ha: K= f 2000 × 9.81 = = 4.36 × 105 N/m x 0.045 (7.19) 3 Si nota che il coefficiente di smorzamento è in questo caso molto elevato in quanto si vuole ridurre il comportamento oscillatorio del sistema. 140 si può quindi valutare la pulsazione s ω= e quindi f = √ K = 218 = 14.76rad/s m (7.20) ω = 2.35Hz. Perchè il sistema possa lavorare con ζ = 0.9 deve essere 2π ζ = c/2ωm c = 2ωmζ = 2 × 14.76 × 0.9 × 2000 = 5.31 × 104 Kg/s (7.21) Nel caso di un velivolo a pieno carico, quindi con valori di rigidezza e di smorzamento viscoso uguali a quelli precedentemente valutati ma con una massa più grande, si ha: s K = 12.05rad/s m∗ ∗ ω = (7.22) Il coefficiente di smorzamento diviene ζ ∗ = c/2ω ∗ m∗ = 0.734 (7.23) quindi il velivolo nelle condizioni di pieno carico si comporta diversamente dal velivolo con il solo pilota e non è possibile ottenere nelle due configurazioni lo stesso comportamento oscillatorio, cioè lo stesso valore di ζ. • Nel caso di vibrazione forzata di tipo armonico con pulsazione ω si considera ancora: f (t) = f ∗ ejωt (7.24) (−ω 2 m + jωc + k)x∗ ejωt = f ∗ ejωt (7.25) e si ha: Si ottiene cosı̀ la funzione di risposta in frequenza, flessibilità dinamica, dalla: H(ω) = x∗ 1 = ∗ 2 f k − ω m + jωc (7.26) Si tratta in tal caso di una grandezza complessa, il modulo è dato da: |H(ω)| = p 1 (k − ω 2 m)2 + (ωc)2 (7.27) e la fase dalla: tan H(ω) = −ωc k − ω2m (7.28) Un esame del comportamento effettivo delle strutture suggerisce anche un modello diverso per rappresentare le caratteristiche di smorzamento; in particolare la dipendenza dalla 141 frequenza delle caratteristiche strutturali può essere rappresentata con uno smorzamento che varia con la frequenza secondo la: c= h ω (7.29) Si tratta del modello di smorzamento strutturale o di isteresi che corrisponde all’equazione (scritta in una notazione mista tempo-frequenza): mẍ + (k + jh)x = f (t) (7.30) Nel caso di risposta forzata si ha la funzione di risposta in frequenza: H(ω) = x∗ 1 = ∗ 2 f k − ω m + jh (7.31) 1/k 1 − (ω/ωn )2 + jh∗ (7.32) o anche: H(ω) = dove h∗ = h/k indica il fattore di perdita strutturale. Si ha quindi per il modulo di H(ω): 1 |H(ω)| = p (k − ω 2 m)2 + h2 (7.33) Le motivazioni legate all’introduzione di questo tipo di smorzamento sono legate al fatto che se si considera l’energia dissipata da una forza di un componente viscoelastico fd = cẋ in un ciclo di un moto armonico con x(t) = sin(ωt) di periodo T = 2π/ω, si ha Ed = Z T 0 fd ẋdt = Z 2π/ω 0 cω 2 cos2 (ωt)dt = πcω (7.34) ovvero si ottiene un’energia dissipata linearmente dipendente dalla frequenza del moto, fatto questo che non ha un’evidenza sperimentale. La caratterizzazione della forza dissipatrice di tipo isteretico come precedentemento introdotta è evidentemente in grado di superare questo errore di modellizzazione. 7.2.1 Funzioni di risposta in frequenza per il modello SDOF Si è definita una funzione di risposta in frequenza H(ω) come rapporto tra lo spostamento, x∗ , e la forza, f ∗ , ma naturalmente è anche possibile scegliere per descrivere il sistema una funzione di risposta in frequenza diversa: ad esempio, con riferimento alla velocità v(t) = ẋ(t) = v ∗ ejωt come grandezza in uscita, si può definire una funzione di risposta in frequenza, indicata con mobilità, con la: Y (ω) = v∗ f∗ 142 (7.35) Se si considerano allora le relazioni: x(t) = x∗ ejωt −→ v(t) = ẋ(t) = v ∗ ejωt = jωx∗ ejωt (7.36) si ha allora: Y (ω) = jω x∗ = jωH(ω) f∗ (7.37) con le relazioni per il modulo: |Y (ω)| = ω|H(ω)| (7.38) θY = θH + 90◦ (7.39) e per la fase: Si può anche considerare in uscita l’accelerazione a(t) = ẍ(t) = a∗ eωt e si definisce cosı̀ la F RF indicata come acceleranza A(ω) = a∗ = −ω 2 H(ω) f∗ (7.40) Come si è detto le F RF sono funzioni complesse e quindi non se ne può avere una rappresentazione diretta su di un piano cartesiano; i tipi classici di rappresentazione sono: • modulo (espresso normalmente in decibel, dB) in funzione della pulsazione (in decadi logaritmiche) e fase in funzione della pulsazione (in decadi logaritmiche),diagramma di Bode; • parte reale in funzione della frequenza (o pulsazione) e parte immaginaria in funzione della frequenza (o pulsazione); con riferimento al caso di smorzamento viscoso si ha Re[H(ω)] = k − ω2m −ωc e Im[H(ω)] = 2 2 2 2 2 (k − ω m) + ω c (k − ω m)2 + ω 2 c2 (7.41) con gli andamenti riportati in Fig. 7.1 e Fig. 7.2. • parte reale e parte immaginaria su di un diagramma polare, con la frequenza come parametro, diagramma di Argand o di Nyquist.4 4 Si noti come nel caso di smorzamento isteretico, Eq. 7.31, si ha per le funzioni parte reale e parte immaginaria: HR = k − ω2 m (k − ω 2 m)2 + h2 HI = −h (k − ω 2 m)2 + h2 da cui si ottiene in forma implicita la curva 2 HR + HI2 = − HI h che rappresenta evidentemente una circonferenza passante per l’origine. 143 Figura 7.1: parte reale di una FRF di un sistema ad un grado di libertà. Figura 7.2: parte immaginaria di una FRF di un sistema ad un grado di libertà. 144 Il diagramma di Argand è molto usato per la sua particolare efficacia nel presentare in dettaglio la zona della F RF nell’intorno della frequenza di risonanza, mentre i punti che sono lontani dalla risonanza sono spostati intorno all’origine del diagramma. In particolare se si considera nel caso della F RF relativa alla velocità Y (ω) il modulo in funzione della frequenza si vede che, per smorzamento piccolo, si ha un diagramma simmetrico rispetto alla frequenza di risonanza. I diagrammi di Argand sempre relativi alla F RF di velocità Y (ω) nel caso di smorzamento viscoso o alla F RF di spostamento H(ω) nel caso di smorzamento strutturale risultano delle circonferenze: questa caratteristica è molto utile per il procedimento di “curve fitting” che può essere utilizzato per la valutazione dei parametri modali. 7.3 Modello a più gradi di libertà - MDOF Si passa ora all’estensione delle considerazioni viste nel caso di un modello ad un solo grado di libertà, SDOF , al caso, di maggiore interesse pratico, del modello a più gradi di libertà , M DOF (Multi Degree of Freedom). 7.3.1 Caso non smorzato: vibrazione libera, modi e frequenze proprie di vibrazione Per il modello a più gradi di libertà le equazioni del moto, nel caso non smorzato, sono: Mẍ(t) + Kx(t) = f (t) (7.42) dove M e K sono le matrici di massa e di rigidezza del sistema di dimensioni n × n se n sono i gradi di libertà che si considerano nel sistema 7.42 ed x(t), f (t) sono i vettori degli spostamenti e delle forze applicate sempre ad n componenti: la matrice di massa è una matrice definita positiva e quella di rigidezza semidefinita positiva in virtù delle ben note proprietà delle energie omonime associabili a tali matrici: in particolare si osserva che per un generico vettore u nonnullo si ha che uT Mu > 0 uT Ku ≥ 0 (7.43) È possibile associare a tali matrici il problema di autovalori (K − λn M)φ(n) = 0 (7.44) in cui, come di consueto, gli autovalori sono calcolati risolvendo l’equazione caratteristica det(K − λ2 M) = 0 145 (7.45) e gli autovettori dai corrispondenti problemi omogenei dati dalla Eq. 7.44. Se ora si scrive la Eq. 7.44 una volta in riferimento all’autovalore n − mo ed una volta a quello m − mo e si T T premoltiplicano le relazioni ottenute rispettivamente per φ(m) e φ(n) si ha T T φ(m) Kφ(n) = λn φ(m) Mφ(n) T (7.46) T φ(n) Kφ(m) = λm φ(n) Mφ(m) (7.47) le quali, sottratte tra loro ed in virtù della simmetrie delle due matrici si ha T 0 = (λn − λm )φ(n) Mφ(m) (7.48) T e cioè, che se gli autovalori λn e λm sono distinti allora deve essere φ(n) Mφ(m) = 0, altrimenti, T quando sono uguali, il prodotto φ(m) Mφ(m) per la positività delle matrice darà luogo ad un numero positivo che si indicherà con mn . Dunque T φ(n) Mφ(m) = δmn mn . ΦT MΦ = ovvero .. mn .. (7.49) . ove la Φ è la matrice avente per colonne gli autovettori φ(n) . Se ora invece che la Eq. 7.44 si considera la equivalente ¶ µ 1 K − M φ(n) = 0 λn e si reitera il ragionamento precedente si ottiene la relazione di ortogonalità .. . T φ(n) Kφ(m) = δmn kn ovvero ΦT KΦ = kn .. . (7.50) (7.51) in cui le rigidezze generalizzate kn non potranno che essere positive (o nulle) in virtù della semi-positività di K. T Si osserva inoltre, dalla Eq. 7.44 premoltiplicata per φ(n) che T λn = φ(n) Kφ(n) (n)T φ (n) Mφ = ωn2 > 0 (7.52) e cioé che l’autovalore λ è positivo e sarà quindi indicato nel seguito con ωn2 . Mostriamo ora come i vettori φ(n) e le costanti ωn appena definite assumano il significato di modi e frequenze (angolari) prorie di vibrazione. Se cosı̀ fosse, per definizione fisica di frequenza e modo proprio di vibrazione, il problema libero Mẍ + Kx = 0 (7.53) x(0) = φ(m) (7.54) ẋ(0) = 0 (7.55) 146 dovrebbe fornire la soluzione x(t) = φ(m) cos(ωn t) (7.56) Se si utilizza infatti il cambiamento di cordinate x = Φq e si premoltiplica la Eq. 7.53 per ΦT , si ottengono una serie di equazioni differenziali ordinarie tutte disaccoppiate la cui ennesima si presenta come mn q̈n + kn qn = 0 la cui soluzione è qn (t) = q0n cos(ωn t) + q̇0n sin(ωn t) ωn essendo x(0) = Φq0 e ẋ = Φq̇0 . Dunque ricostruendo la soluzione originaria ed in base alle condizioni inizali del problema 7.54 e 7.55 si ha proprio la Eq. 7.56. Pertanto, nel seguito si identificheranno le ωn e i φ(n) direttamente come frequenze (angolari) e modi propri della struttura in esame (sebbene a rigore essi rappresenterebbero, nell’ambito della discretizzazione agli elementi finiti della struttura a cui si fa riferimento, una discretizzazione dell’originario concetto fisico). La soluzione completa del problema è contenuta nelle matrici degli autovalori, indicata con Ω2 che è un matrice diagonale che contiene sulla diagonale principale le pulsazioni naturali al quadrato, e degli autovettori, indicata con Φ che contiene, posizionata per colonne, le deformate modali φ(n) . Con procedimenti numerici basati sulla risoluzione dell’Eq. 7.44 è possibile passare dalle matrici spaziali, di massa M e di rigidezza K, alle matrici che rappresentano il modello modale, indicate con Ω2 e Φ. Si ricorda che la matrice delle pulsazioni naturali, Ω2 , è univocamente determinata mentre la matrice delle deformate modali, Φ, non lo è , in quanto le singole deformate φ(n) sono definite a meno di una costante come autosoluzioni del problema omogeneo 7.44. Si possono utilizzare diversi procedimenti di normalizzazione delle deformate modali, il più significativo è quello di normalizzazione rispetto alla massa; in questo caso gli autovettori, indicati nella matrice Φ∗ , sono definiti dalle relazioni: Φ∗T MΦ∗ = I ∗T ∗ (7.57) 2 Φ KΦ = Ω (7.58) dove I, Ω2 indicano rispettivamente la matrice diagonale unitaria e la matrice diagonale delle pulsazioni naturali; la relazione esistente tra il generico modo k normalizzato ed il corrispondente modo non normalizzato è data dalla: (k) φ∗ 1 = √ φ(k) mk 147 (7.59) 7.3.2 Caso non smorzato: risposta forzata Consideriamo ora, sempre per il modello non smorzato, il caso forzato, in cui si ha un vettore di forze di ingresso caratterizzato da componenti tutte alla stessa pulsazione ω, ma con diversa ampiezza e fase definito dalla:5 f (t) = f ∗ ejωt (7.63) In questo caso si pone la soluzione del sistema 7.42 nella forma: x(t) = x∗ ejωt (7.64) dove f ∗ , x∗ sono vettori ad n componenti di ampiezze complesse. L’equazione del moto 7.42 diviene: (K − ω 2 M)x∗ ejωt = f ∗ ejωt (7.65) si può cosı̀ definire una matrice di flessibilità dinamica, che costituisce un modello di risposta nel campo delle funzioni di risposta in frequenza, F RF , con la: H(ω) = (K − ω 2 M)−1 (7.66) L’elemento generico della matrice di flessibilità dinamica può essere definito dalla: Hjk (ω) = x∗j fk∗ (7.67) 5 Questo modo di procedere che si è pure usato nei parr. 1.6.2, 1.6.3 e 7.2, è equivalente a considerare la trasformata di Fourier dell’Eq. 7.42: seguendo tale approccio i vettori x∗ e f ∗ rappresenterebbero rispettivamente la trasformata di Fourier del vettore delle uscite x(t) e di quello degli ingressi f (t). Infatti se si considerasse ad Ω esempio un ingresso sinusoidale (causale) f (t) = sin(Ωt) si avrebbe trasformata di Laplace f˜(s) = s2 +Ω 2 e quindi si avrebbe risposta x̃(s) = H(s) s2 Ω ρ ρ∗ = x̃s (s) + x̃r (s) ' + 2 +Ω s − jΩ s + jΩ (7.60) in cui x̃s indica la parte di risposta collegata con i poli (stabili) del sistema e x̃r la parte legata all’ingresso (risposta a regime) che qui si vuole considerare. Se ora si cercano i residui ρ e ρ∗ si otterrebbe ρ= H(jΩ) 2j ρ∗ = H(−jΩ) H̄(jΩ) = = ρ̄ −2j −2j (7.61) Si avrebbe quindi nel dominio del tempo (H(−jΩ) ≡ H̄(jΩ)) · xr (t) = L −1 H(jΩ) H̄(jΩ) − 2j(s − jΩ) 2j(s + jΩ) ¸ 6 ³ = |H(jΩ)| sin Ωt + H(jΩ) 6 ´ (7.62) in cui H(jΩ) indica la fase del numero complesso H(jΩ). La precedente si interpreta dicendo che la funzione di risposta in frequenza H(jω) rappresenta in modulo e fase (complessi) il modulo e la fase della risposta del sistema ad un ingresso armonico semplice di pulsazione Ω e ampiezza unitaria e fase nulla. 148 ∗ = 0 per m diverso da k. Come risulta evidente dalla 7.66 è possibile calcolare i in cui però fm valori della matrice di flessibilità dinamica, H(ω), per ogni pulsazione ω, se sono note le matrici, M e K, del modello spaziale. Questo procedimento richiede l’inversione di una matrice, in genere di grandi dimensioni, per ogni valore di ω ciò presenta diverse limitazioni in quanto diviene numericamente costoso se il numero dei gradi di libertà è molto alto. Inoltre si deve calcolare tutta la matrice H(ω) in blocco e non si ottengono informazioni sulle proprietà delle singole F RF . Si può impiegare, e risulta generalmente conveniente, un approccio diverso che consente di calcolare la matrice di flessibilità dinamica H(ω) in funzione del modello modale invece di quello spaziale. Dalla 7.66 si ha: (K − ω 2 M) = H(ω)−1 (7.68) premoltiplicando per la matrice trasposta degli autovettori, normalizzati rispetto alla massa, e postmoltiplicando per la matrice degli autovettori normalizzati si ha: Φ∗T (K − ω 2 M)Φ∗ = Φ∗T H(ω)−1 Φ∗ (7.69) Utilizzando le proprietà di ortogonalità 7.57 e 7.58 la 7.69 diviene: .. . ωn2 k − ω 2 .. = Φ∗T H(ω)−1 Φ∗ (7.70) . da cui invertendo, premoltiplicando per la matrice Φ∗ e postmoltiplicando per la matrice Φ∗ si ottiene: .. . H(ω) = Φ ∗ T 1 2 ωnk − ω 2 .. ∗T Φ (7.71) . Dalla relazione 7.71 si vede che la matrice di flessibilità dinamica è una matrice simmetrica, ¡ ¢−1 infatti risulta dal prodotto di una matrice, Φ∗ , per una matrice diagonale, Ω2 − ω 2 I per la ∗T trasposta della matrice iniziale, Φ , come d’altra parte la matrice H(ω) deve essere simmetrica in base al principio di reciprocità (teorema di Betti): Hjk (ω) = x∗j x∗k = H (ω) = kj fk∗ fj∗ (7.72) La 7.71 permette di calcolare il singolo elemento della matrice di flessibilità dinamica dalla: Hjk (ω) = (r) (r) n X φj φk mr (ωn2 r − ω 2 ) r=1 149 (7.73) (r) dove il simbolo φk indica la componente k − sima del modo r − imo; il singolo elemento della matrice di flessibilità si può quindi anche scrivere sinteticamente come: Hjk (ω) = (r) n X Ajk k=1 ωn2 r − ω 2 (7.74) (r) dove con Ajk si indica la costante modale del modo r − imo relativa ai gradi di libertà j e k. 7.3.3 Smorzamento proporzionale Si fa ora riferimento ad un caso particolare di smorzamento che presenta il vantaggio di una grande semplicità di analisi: il punto essenziale è che con questo modello di smorzamento i modi fondamentali da considerare sono praticamente uguali a quelli del modello non smorzato, infatti le deformate modali sono identiche e le frequenze naturali sono numericamente molto vicine. Quindi è possibile ricavare le proprietà modali di una struttura rappresentata con uno smorzamento di tipo proporzionale a partire dallo studio del modello non smorzato.6 L’equazione generale del moto in presenza di smorzamento risulta:7 Mẍ + Cẋ + Kx = f (t) (7.76) • Se si pone la matrice di smorzamento come proporzionale rispetto alla matrice di rigidezza si ha: C = βK (7.77) se si premoltiplica la matrice di smorzamento per la matrice, trasposta, degli autovettori del sistema non smorzato e si postmoltiplica per la matrice degli autovettori del sistema non smorzato si ottiene: .. . ΦT CΦ = βΦT KΦ = β kk . .. = . .. ck .. (7.78) . 6 In realtà si potrebbe mostrare che tale modello di smozamento che mostra i vontaggi indicati dal punto di vista modale, è il modello a cui tendono tutti i modelli più generali di smorzamento qualora il l’entità del medesimo risulti limitata. 7 Se si assume che l’effetto dello smorzamento sia quello di dissipare l’energia elastica e cinetica posseduta dal sistema vibrante, allora la Eq. 7.76 scritta nel caso di vibrazione libera e premoltiplicata per xT diviene d dt ³ ´ 1 T 1 ẋ Mẋ + xT Kx = −ẋT Cẋ 2 2 (7.75) che implica, dovendo l’energia elastica più cinetica comunque dimunuire nel tempo per ogni condizione di stato, che la matrice C debba essere definita positiva. 150 dove gli elementi ck sono gli smorzamenti dei singoli modi del modello; il fatto che la matrice che si ottiene con questa operazione sia una matrice diagonale dipende dalla condizione di proporzionalità, 7.77, ed indica che le deformate modali del sistema non smorzato possono essere impiegate per il sistema smorzato, con smorzamento proporzionale. Se si considera il sistema 7.76 nel caso di risposta libera, premoltiplicando per la matrice trasposta degli autovettori del sistema non smorzato si ha: ΦT Mẍ + ΦT Cẋ + ΦT Kx = 0 (7.79) Sostituendo poi alle coordinate fisiche le coordinate modali, q con la posizione: x=Φq si ottiene: . .. mk .. . .. q̈ + ck . (7.80) . .. .. q̇ + kk . .. q = 0 (7.81) . in cui ck := βkk e che, scritta per il k-simo modo diviene: mk q̈k + ck q̇k + kk qk = 0 (7.82) si tratta dell’equazione di un sistema ad un solo grado di libertà (v. par. 7.3) che ha una frequenza naturale complessa con una parte oscillatoria data dalla: ωn0 k = ωnk q 1 − ζk2 (7.83) dove ωnk è la pulsazione naturale non smorzata del modo k − imo, data dalla ωn2 k = kk /mk , e ζk è il coefficiente adimensionale di smorzamento del modo ζk , dato dalla ζk = √ ck /2 kk mk , e con un decadimento esponenziale dato dalla: σk = ζk ωnk (7.84) In analogia alquanto visto per il caso in assenza di smorzamento nel par. 7.3.2, nel caso di sistema forzato si ottiene per la matrice di flessibilità o matrice delle funzioni di risposta in frequenza l’espressione: h i−1 H(ω) = K + jωC − ω 2 M (7.85) e quindi il generico termine della matrice di flessibilità risulta: (r) (r) (r)∗ (r)∗ n X φj φk φj φk = (7.86) Hjk (ω) = k − mr ω 2 + jωcr ω 2 − ω 2 + jωωr ζr r=1 r r=1 r √ con ζr = cr /2 kr mr , che è del tutto simile alla analoga espressione 7.73 ottenuta per il n X caso non smorzato, sebbene in questo caso il termine Hjk (ω) risulta complesso. 151 • Si è considerato un caso particolare di matrice di smorzamento proporzionale alla matrice di rigidezza, ma in realtà una situazione equivalente si ha se la matrice di smorzamento è proporzionale rispetto alla matrice di massa del sistema, secondo la: C = αM (7.87) Più in generale nel caso di smorzamento proporzionale si considera che la matrice di smorzamento possa essere proporzionale rispetto ad una combinazione lineare delle matrici di massa e di rigidezza con la posizione: C = βK + αM (7.88) ck = βkk + αmk (7.89) da cui ed il sistema smorzato avrà ancora autovalori del tipo 7.83 ed autovettori che sono uguali a quelli del sistema non smorzato corrispondente. Questo modello di smorzamento proporzionale, oltre al vantaggio della semplicità di trattazione, risulta di interesse pratico in quanto i meccanismi fisici di smorzamento sono effettivamente collegati con le caratteristiche di rigidezza della struttura, per quanto riguarda lo smorzamento interno del materiale, e con le caratteristiche di massa, per quanto riguarda lo smorzamento di attrito. Si osserva comunque che i sopra indicati casi di smorzamento proporzionale a rigidezza e massa, i poli del sistema smorzato (v. pure App. B.3) sono dati da q sn1,2 = −ζn ωn ± jωn 1 − ζn2 (7.90) √ in cui ζr = (αmr + βkr )/2 kr mr , che è l’espressione per i sistemi ad un grado di libertà con smorzamento viscoso. • Delle considerazioni del tutto analoghe si possono sviluppare per un modello a più gradi di libertà, ma con smorzamento di isteresi (v. par. 7.2); l’equazione generale del moto risulta in tal caso scritta (nella forma mista tempo-frequenza): Mẍ + (K + jH)x = f (7.91) Se si pone la matrice di smorzamento di isteresi H come proporzionale rispetto alle matrici di massa e di rigidezza: H = βK + αM 152 (7.92) anche in questo caso gli autovettori del sistema smorzato risultano uguali a quelli del sistema non smorzato e gli autovalori, complessi, risultano con quadrato pari a: s2k = −ωn2 k (1 + jηk ) (7.93) dove ωn2 k = kk /mk e per i fattori di perdita ηk = β + α/ωn2 k ; infine, il generico termine della matrice di flessibilità dinamica risulta: n X (r) (r) Hjk (ω) = kr φj r=1 − ω2m 153 φk r + jηr kr (7.94)
Scaricare