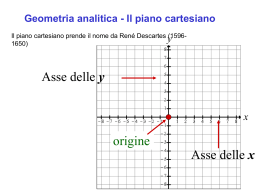
SISTEMI di RIFERIMENTO PIANI DEFINIZIONE Un sistema di riferimento è un insieme di parametri (presi a coppie o a terne), detti coordinate, che individuano la posizione dei punti (nel piano o nello spazio). Le coordinate sono grandezze, omogenee o eterogenee, con la funzione di individuare la posizione dei punti (nel piano o nello spazio). PER DEFINIRE UN PUNTO : SISTEMI DI RIFERIMENTO CARTESIANI SISTEMI DI RIFERIMENTO POLARI Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 2 DEFINIZIONE DEL PUNTO SUL PIANO il sistema cartesiano obliquo Consideriamo nel piano due rette (dette assi coordinati) formanti un angolo . Y + O - X Su ciascuna di esse viene fissato un sistema di ascisse in modo che i rispettivi punti origine O coincidano. + - Si dice che è stato fissato nel piano un sistema cartesiano obliquo OXY. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 3 DEFINIZIONE DEL PUNTO SUL PIANO il sistema cartesiano obliquo Y xP yP O yP xP Ad ogni punto P del piano P viene associata in modo biunivoco una coppia (xP;yP) di numeri reali omogenei, detti coordinate cartesiane oblique di P. X Esse indicano la distanza relativa di P da ciascuna delle rette, rispetto al sistema di ascisse fissato su ciascun asse coordinato. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 4 DEFINIZIONE DEL PUNTO SUL PIANO il sistema cartesiano ortogonale Y xP yP P Quando l’angolo formato tra i due assi è retto ( = 90°), siamo nella situazione semplificata detta sistema cartesiano ortogonale. yP La coppia di numeri xP;yP è detta coordinate cartesiane ortogonali di P (xP si dice ascissa di P e yP si dice ordinata di P). 90° O xP X In questo ambito siamo di una situazione semplificata e di più frequente impiego. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 5 DEFINIZIONE DEL PUNTO SUL PIANO il sistema polare N Consideriamo una semiretta orientata ON nel piano (asse polare). Consideriamo l’estremo O come origine della semiretta (polo). + O Consideriamo come positivo il senso orario (destrogiro) per la rotazione dei segmenti. Si è così definito un sistema di riferimento polare. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 6 DEFINIZIONE DEL PUNTO SUL PIANO il sistema polare + N P OP O Ad ogni punto P viene associata in modo biunivoco una coppia (OP;P) di numeri reali eterogenei, detti coordinate polari di P. La prima coordinata polare (detta modulo) è la distanza tra il polo O del sistema e il punto P. La seconda coordinata polare (detta azimut) è l’angolo OP descritto dall’asse polare per sovrapporsi, ruotando in senso orario, alla direzione OP. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 7 DEFINIZIONE DEL PUNTO SUL PIANO il sistema polare N P OP K OK OQ O OT Q T L’azimut OP è sempre compreso tra 0C e 400C. I punti che hanno lo stesso azimut giacciono tutti su una retta. Il modulo può variare tra 0 (O P) e valori grandissimi (P lontanissimo da O). I punti che hanno lo stesso modulo giacciono su un cerchio. La notazione OP può essere sostituita con l’analoga: (OP). Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 8 trasformazione SISTEMA POLARE SISTEMA CARTESIANO TRASFORMAZIONE tra Sistemi di Riferimento La traduzione delle coordinate espresse in un SR in coordinate espresse in un altro SR è sempre possibile in qualsiasi situazione. Y N Tuttavia, per semplicità e per opportunità, imporremo le seguenti limitazioni e semplificazioni: le origini dei due sistemi devono coincidere; O X l’asse polare deve coincidere con l’asse delle ordinate del sistema cartesiano. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 10 trasformazione POLARI CARTESIANE YN XP H YP O DATI INCOGNITE OP; (OP) XP ; YP P Proiettando il punto P sull’asse delle ascisse, rimane definito il triangolo retto OPH. (OP) I cateti di questo triangolo retto sono le coordinate cartesiane di P (XP ; YP). X X P OP sin( OP ) YP OP cos(OP ) Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 11 trasformazione SISTEMA CARTESIANO SISTEMA POLARE trasformazione CARTESIANE POLARI YN XP H YP O DATI INCOGNITE XP ; YP OP; (OP) Proiettando il punto P sull’asse delle ascisse, rimane definito il triangolo retto OPH. P L’ipotenusa e l’angolo POH di questo triangolo retto sono le coordinate polari di P (OP;(OP)). (OP) X XP (OP ) arctg ( ) YP XP YP OP sin( OP ) cos(OP ) Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 13 trasformazione CARTESIANE POLARI RIFLESSIONE !! Il valore di fornito dalla relazione YN XP YP O P XP (OP ) arctg ( ) YP è l’azimut (OP) solo se le coordinate cartesiane di P sono entrambe positive (P nel I° quadrante). (OP) X In ogni altro caso (sono 3) l’angolo fornito dalla funzione inversa arctg non è l’azimut cercato, ma un angolo acuto . Tuttavia, partendo da questo, sarà poi possibile risalire rapidamente all’azimut (OP) corretto. Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 14 RICERCA AZIMUT: X pos. Y neg. (+/-) Proiettando il punto P sull’asse delle ascisse rimane ANCORA definito il triangolo retto OPH (ma nel II°Q.). YN (OP) O –YP X P H +XP Tuttavia, l’angolo POH di questo triangolo non è più l’azimut (OP). Esso, però, può essere calcolato con la seguente procedura composta di due fasi: 1° si calcola usando i cateti del triangolo OPH, dunque i valori assoluti delle coordinate di P: arctg 2° si calcola l’azimut (OP) supplementare di : XP YP (OP ) 200C Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 15 RICERCA AZIMUT: X neg. Y neg. (-/-) YN Ripetendo il ragionamento, si applica la procedura composta di due fasi: 1° si calcola l’angolo acuto usando i cateti del triangolo OPH, dunque i valori assoluti delle coordinate di P: O X arctg –YP (OP) XP YP 2° si calcola l’azimut (OP) che differisce da per un angolo piatto: P H –XP (OP ) 200C Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 16 RICERCA AZIMUT: X neg. Y pos. (-/+) YN Ripetendo ancora il ragionamento, si applica ulteriormente la procedura composta di due fasi: –XP P 1° si calcola l’angolo acuto usando i cateti del triangolo OPH, dunque i valori assoluti delle coordinate di P: H +YP (OP) X O arctg XP YP 2° si calcola l’azimut (OP) esplementare di : (OP ) 400C Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 17 RICERCA AZIMUT: TABELLA RIASSUNTIVA GENERALIZZANDO 1° si calcola l’angolo acuto usando i valori assoluti delle coordinate di P: YN arctg YP 2° si calcola l’azimut (OP) secondo lo schema della seguente tabella: O XP X Quad. Segni Azimut I II III +/+ +/– –/– 200C – 200C + IV –/+ 400C – Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 18 ANGOLO di DIREZIONE di UN LATO DEFINIZIONE L’angolo di direzione (o azimut) del lato AB, è l’azimut del secondo estremo B del lato, rispetto a un sistema polare con polo nel primo estremo A del lato e asse polare parallelo all’asse coordinato Y; per indicarlo useremo la notazione (AB). N Y N B (AB) (BA) A O X Analogamente, l’angolo di direzione (o azimut del lato BA) sarà l’azimut del punto A rispetto a un sistema polare con polo in B e asse polare parallelo all’asse Y; per indicarlo useremo la notazione (BA). Gli angoli di direzione (AB) e (BA) si dicono RECIPROCI. Essi differiscono tra loro sempre di 200C: (BA) – (AB) = 200C: (BA) = (AB) + 200C (BA) = (AB) – 200C Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] oppure 20 COORDINATE TOTALI & COORDINATE PARZIALI Un sistema di riferimento principale è un sistema cartesiano ortogonale OXY, unico in un certo ambito. Le relative coordinate sono dette totali e indicate in maiuscolo. Y Assumiamo poi un altro sistema di riferimento cartesiano con origine in un punto A di coordinate totali XA, YA note, e assi coordinati paralleli a quelli del sistema principale. Chiameremo tale sistema di riferimento sistema secondario Axy, e le coordinate relative di un punto P sono dette in modo sintetico: coordinate parziali di P rispetto ad A, e sono indicate con la notazione (xP)A; (yP)A y XA x A YA y X O YB YC y XB x B XC C x A differenza del sistema principale, i sistemi secondari possono essere numerosi: la loro origine coincide sempre con punti di coordinate totali note (per es. Bxy, Cxy, Dxy…). Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 22 relazione tra coordinate TOTALI PARZIALI Y y Tra le coordinate totali dei punti A e B, e quelle parziali di B rispetto al sistema secondario con origine in A [indicate con la notazione (xB)A; (yB)A], si possono scrivere le seguenti relazioni, ovvie e immediate: XB B (yB)A (xB)A (xB)A = XB XA (yB)A = YB YA YB XA A O x YA quindi: X XB = XA + (xB)A YB = YA + (yB)A Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 23 relazione tra coordinate TOTALI PARZIALI Y yN Assumiamo ora un sistema polare con polo sul punto A ed asse polare coincidente con l’asse secondario delle ordinate y, e perciò parallelo a Y; allora l’azimut (AB) e la distanza AB sono le coordinate polari di B rispetto a questo sistema. XB B (yB)A (xB)A (AB) XA A O Esse possono essere utilizzate per definire le coordinate parziali di B: YB x YA X (xB)A= AB sen(AB) (yB)A = AB cos(AB) e ricordando le precedenti: XB = XA + AB sen(AB) YB = YA + AB cos(AB) Copyright © 2009 Zanichelli editore S.p.A., Bologna [6629] 24
Scaricare