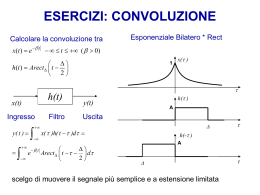
LUCIDI dell'insegnamento di COMUNICAZIONI ELETTRICHE eo/in/bi PRIMA DI INTRAPRENDERE LO STUDIO DI QUESTO MATERIALE E’ FONDAMENTALE LEGGERE ACCURATAMENTE LA PAGINA: http://www.arch.dibe.unige.it/ccl/dispense/Comunicazioni%20Elettriche/LucidiCE.htm Attenzione: questi lucidi NON SONO PRIVI DI ERRORI 1.2 SEGNALI E SISTEMI • • • • S.L.T.I Integrale di Convoluzione Autofunzioni Trasformata di Fourier SEGNALE Sorgente Tx Canale Segnale Segnale 1.3 Dest. Rx Segnale Segnale SORGENTE : ES. MICROFONO, TELECAMERA, ETC. FORNISCE AL Tx L’ INFORMAZIONE PER IL DESTINATARIO SOTTO FORMA DI GRANDEZZA (ES. ELETTRICA). Tx : MANIPOLA UNA GRANDEZZA (ES. ELETTRICA); PERTURBA UNA GRANDEZZA (ES. ELETTRICA, MECCANICA, E.M.,…). CANALE : PROPAGA LA PERTURBAZIONE DELLA GRANDEZZA (ES. ELETTRICA,MECCANICA,..). Rx : CONVERTE LA PERTURBAZIONE IN UNA GRANDEZZA (ES. ELETTRICA); MANIPOLA TALE GRANDEZZA PER CONSENTIRE AL DESTINATARIO DI RICEVERE L’ INFORMAZIONE EMESSA DALLA SORGENTE. SEGNALE : E’ L’ ANDAMENTO DELLE GRANDEZZE CHE PORTANO L’ INFORMAZIONE DALLA SORGENTE ALLA DESTINAZIONE. 1.4 SEGNALI CONSIDERIAMO I SEGNALI IN ASTRATTO, INDIPENDENTEMENTE DAL TIPO DI GRANDEZZA FISICA AD ESSI ASSOCIATA. LI RAPPRESENTIAMO COMA FUNZIONI MATEMATICHE REALI () O COMPLESSSE(C) DEFINITE TIPICAMENTE NEL DOMINIO DEL TEMPO (ES.x(t)). POSSONO ANCHE ESSERE DEFINITI SU DOMINI DIVERSI A UNA O PIU’ DIMENSIONI (ES. DOMINIO SPAZIALE 2D). ESEMPI : 1D VOCE, DATI (x(t); x(nt)) 2D IMMAGINI (I(x,y)) 1.5 RAPPRESENTAZIONE DEI SEGNALI Continuo TEMPO Discreto x nT x t t t Segnale analogico Segnale campionato x nT x t t t Segnale discreto Segnale digitale 1.6 SEGNALI E SISTEMI Tx Canale RX Tx : SORGENTE DI INFORMAZIONE (TRASMETTITORE) CANALE : MEZZO VETTORE PER L’INFORMAZIONE Rx : UTENTE FINALE (RICEVITORE) L’INFORMAZIONE DA TRASMETTERE É “CODIFICATA” NEL SEGNALE REALE (VOCE, ......). 1-D (VOCE, DATI) TIPI DI SEGNALI 2-D (SEGNALE TV) 1.7 SEGNALI 1) SEGNALI DETERMINISTICI : IL SEGNALE É NOTO ISTANTE PER ISTANTE ( x(t) ) 2) SEGNALI ALEATORI : NON É POSSIBILE CONOSCERE IL VALORE DEL SEGNALE ISTANTE PER ISTANTE ( x(t) ESPRESSIONE ANALITICA “TROPPO COMPLESSA” O NOTO SOLO SU BASE STATISTICA ). 1.8 SISTEMI x(t) F(.) y(t) SISTEMA : QUALSIASI COSA CHE OPERA UNA “TRASFORMAZIONE” SU DI UN SEGNALE x(t). ESEMPIO : CANALE DI TRASMISSIONE LINEA DI RITARDO (y(t)=x(t-T)) AMPLIFICATORE (y(t)=Ax(t)) 1.9 ESEMPI DI SISTEMI x t x t y t Ax t A Ritardo Amplificatore ideale y t x t T T x t x t 2 y t x 2 t Quadratore y t x t cos t Es. di modulatore cos t 1.10 SISTEMI LINEARI TEMPO INVARIANTI (S.L.T.I.) LINEARITA’ : xi t yi t x j t y j t xi t x j t yi t y j t (SOVRAPPOSIZIONE DEGLI EFFETTI) TEMPO INVARIANZA : xt y t xi(t), xj(t); , xt T y t T x(t), t 1.11 S.L.T.I PER QUESTI SISTEMI E’ INTERESSANTE STUDIARE IL SEGNALE “RETTANGOLO” R t 1 R t t : RETTANGOLO DI AREA UNITARIA MOTIVO : CONOSCENDO LA RISPOSTA DI UN S.L.T.I. A R t PUO’ CALCOLARE LA RISPOSTA AD INGRESSI PIU’ COMPLESSI. SI 1.12 x(t) : SEGNALE “GENERICO” (REALE) x (t) x(t) N x t x n R t n n0 IPOTESI : “OPPORTUNAMENTE PICCOLO” SI DEVE MOLTIPLICARE PER POICHE’ R t HA AMPIEZZA PARI A VALORE DI 1 E SI DEVE CONSERVARE IL x n 1.13 R t S.L.T.I hR t x t y t S.L.T.I N y t x n hR t n n0 DOVE hR : RISPOSTA A “RETTANGOLO UNITARIO”. LIMITE DI: 0 y t x h t d h t lim hR t 0 1.14 INTEGRALE DI CONVOLUZIONE : y t x h t d y t x t h t h t : RISPOSTA ALL’ IMPULSO DI AREA UNITARIA (“DELTA DI DIRAC”) R t 1 0 t Lim 0 t t 0 1.15 t E’ UNA “FUNZIONE GENERALIZZATA” ; E’ IMPORTANTE QUELLO CHE FA PIU’ CHE IL VALORE CHE ASSUME. f x x dx = f 0 1.16 N.B : x t t T x t T CONVOLUZIONE LA CONVOLUZIONE TRA UN IMPULSO E UNA FUNZIONE GENERA LA FUNZIONE STESSA TRASLATA NEL PUNTO DI APPLICAZIONE DELL’ IMPULSO. f t t T f T t T f t t T dt f T PRODOTTO IL PRODOTTO TRA UNA FUNZIONE ED UN IMPULSO HA L’ EFFETTO DI CAMPIONARE LA FUNZIONE IN UN ISTANTE. 1.17 RISPOSTA ALL’ IMPULSO h t INTEGRALE DI CONVOLUZIONE y t x h x h t d CAMBIO DI VARIABILE t h x t d x t h t h t x t SISTEMI CAUSALI : h t E’ DIVERSA DA 0 SOLO PER t >O 1.18 INTERPRETAZIONE GRAFICA DI: y(t)=x(t)*h(t) h(t- ) h( ) x( ) t ,t t t=0 h ) •“FACCIO SCORRERE h t t •“RIBALTO” (ottengo •“MOLTIPLICO E INTEGRO” x h t d ESEMPIO DI CALCOLO DELL’ INTEGRALE DI CONVOLUZIONE PER VIA GRAFICA DATI : h(t) 1 RISPOSTA 0 2T T t 3T ALL’IMPULSO DI UN SISTEMA -2 x(t) 3 2 INGRESSO 1 2T -2T -T 0 T - -1 DETERMINARE L’USCITA y(t) del SISTEMA. t 1.19 1.20 SAPPIAMO CHE : y t x t h t x h t d LAVORIAMO PER VIA GRAFICA. OCCORRE RIBALTARE h(t) : h(- ) Cambiato nome della variabile di integrazione 1 -3T -2T -T 0 -1 -2 LASCIAMO INALTERATA x(t), SI PUO’ EFFETTUARE IL PRODOTTO TRA x(t) E h(-) ED INTEGRARE : y 0 T 1 2 2 1 0 1.21 A QUESTO PUNTO SI PUO’ TRASLARE LA h(t) DI ALTRE QUANTITA’ QUINDI CON LO STESSO METODO RICAVARE LE y RELATIVE. TABULANDO LA y AD INTERVALLI T SI OTTIENE: y(t) t y(t) -2T 0 4T -T -T T 5T 0 0 T T 0 2T -5T 3T 5T t 1.22 SI NOTI CHE PER VALORI DI t COMPRESI TRA MULTIPLI DI T , LA y VARIA LINEARMENTE CON IL PARAMETRO, E QUINDI LA TABELLA E’ SUFFICIENTE A DESCRIVERE COMPLETAMENTE L’USCITA. y(t) 5T -T 2T -2T -T 0 -T -5T T 3T 4T 5T t 1.23 ALLO STESSO RISULTATO SI ARRIVA RIBALTANDO E TRASLANDO x(t) E MANTENENDO INALTERATA h(t). PROPRIETA’ DELL’ INTEGRALE DI CONVOLUZIONE: DURATA DEL RISULTATO DI CONVOLUZIONE E’ LA SOMMA DELLA DURATA DEGLI OPERANDI DELLA CONVOLUZIONE. 1.24 ESEMPI DI h(t) • FILTRI h(t) (ideali) (non realizzabili) h(t) +1 t +1 t -1 “PASSA BASSO” “PASSA ALTO” (“Integratore”) (“Derivatore”) • CIRCUITO RC: h(t) A Ae t RC “E’ UNA SPECIE DI INTEGRATORE” x(t) t RC R y(t) C t u t t 1.25 IN BASE AL VALORE DI RC POSSO AVERE: Vu(t) T Vi(t) Vi(t) t Vu(t) t T Vi(t) RC t 1.26 ESEMPIO DI CALCOLO ANALITICO DELL’INTEGRALE DI CONVOLUZIONE R u(t)gradino SI VUOLE CALCOLARE L’USCITA y(t). C y(t) h t Ae t u t y t A 1 RC u h t d h t Ae t u t MA: • u()=0 SE <0 • h() E’ UN SISTEMA CAUSALE h(t- )=0 SE t- <0 >t 1.27 QUINDI : (t>0) y t t 0 Ae t t t t Ae d Ae e d 0 e t 0 1 e t u t A y(t) A/ =1 Uscita nulla per t 0 t y(t) TENDE AD ESSERE UNA RAMPA EFFETTO INTEGRATIVO ( FILTRO PASSA BASSO) 1.28 OSSERVAZIONI SULL’ INTEGRALE DI CONVOLUZIONE • L’ effetto di h(t) sul segnale x(t) dipende dalla “forma” di h(t). • Allungamento durata temporale (y(t) dura piu’ di x(t) e h(t)) • Per calcolare l’ integrale di convoluzione per via “ grafica conviene “ribaltare” la funzione piu’ semplice fra x(t) e y(t). 1.29 ES. CALCOLO INTEGRALE DI CONVOLUZIONE PER VIA GRAFICA 1> 2 1 2 “RIBALTO x2(t)” “FACCIO SCORRERE x2(t)” v1 x1 v2 x2 x2 t x 2 x1 t t a b c d -d -c a b 1 2 y(t) v1 v2 1 ESTENSIONE DURATA 1 2 a+c b+d 1 2 t 1.30 IMPULSO DI DIRAC (t) Durata nulla Altezza Area unitaria DEF : + - Funzione generalizzata t dt 1 t x t dt x 0 “HA SENSO SOLO SOTTO INTEGRALE” ANCHE SE NOI LA USEREMO SPESSO SENZA INTEGRALE. RITARDO x t 1 t t T x t T 1 t T 1 t u t CAMPIONAMENTO x t t T x T t T x T d x T
Scaricare