Capitolo 1 Introduzione ai sistemi ottici ed elettroottici di remote sensing
1 Introduzione ............................................................................................................................... 2
2 Applicazioni del ‘remote sensing’ ottico e elettro-ottico ........................................................3
3 Blocchi che costituiscono un sistema elettro-ottico. ................................................................ 4
4 Classificazione dei sistemi Elettro-Ottici ..................................................................................... 8
5 I sistemi ottici................................................................................................................................... 9
6 Caratteristiche dei segnali ottici ................................................................................................. 11
8 Caratteristiche “gaussiane” di un sistema ottico. ...................................................................... 28
9 Caratteristiche non-Gaussiane fondamentali............................................................................. 32
10 Sorgenti di radiazioni elettromagnetiche di interesse nei sistemi ottici o elettroottici ......... 34
11 LASER ......................................................................................................................................... 38
12 Sensori..........................................................................................................................................41
13 Camere termiche......................................................................................................................... 43
14 Elementi di radiometria e fotometria........................................................................................ 43
15 Radar ottico ................................................................................................................................. 46
16 Rivelazione diretta , rivelazione coerente e single photon counting....................................... 47
17 Lidar............................................................................................................................................. 50
18 Requisiti del sistema ottico......................................................................................................... 53
19 Schemi ottici dei sistemi Lidar e dei sottoassiemi ....................................................................54
20 Telemetri ottici passivi................................................................................................................56
21 Telemetri ottici attivi .................................................................................................................. 57
22 Velocimetri laser ......................................................................................................................... 57
23 Fabry Perot.................................................................................................................................. 60
1
Capitolo 1 Nozioni generali
1 Introduzione
In questo volume sono raccolti gli appunti delle lezioni di ‘remote sensing’ elettro-ottico tenute
nell’ambito del corso di tele-rilevamento. Lo scopo di questo volume è quello di introdurre i sistemi
di ‘remote sensing’ ottici ed elettro-ottici in forma elementare per poter facilitare l’accesso alla
letteratura specializzata necessaria per una loro progettazione sia a livello sistemistico che
specialistico.
Nel testo è fornita una descrizione dei principali parametri che ne condizionano e limitano il
funzionamento. La descrizione di alcuni sistemi di largo uso cerca di esemplificare l’applicazione
delle informazioni date. L’analisi delle problematiche elettro-ottiche è prevalentemente limitata alla
parte relativa alla caratterizzazione del ‘front end’ in quanto l’elaborazione successiva è
diffusamente e esaurientemente trattata nelle altre parti del corso di telerilevamento o in esami
complementari.
Il volume è organizzato in 6 capitoli:
1.Nozioni generali. Viene definito lo scopo degli strumenti di “remote sensing” ed indicati i
principali campi di applicazione. Viene definito che cosa si intende per “sistema di remote sensing”.
Le principali nozioni di cui si deve tenere conto nella progettazione o nell’uso di un sistema ottico o
elettro-ottico. In particolare vengono descritte le principali caratteristiche delle radiazioni di
interesse nei sistemi di remote sensing.
Radiometria. Semplici nozioni di radiometria, che hanno lo scopo di chiarire i modi nei quali
l’energia associata alla radiazione viene utilizzata dai sistemi di interesse per il remote sensing.
Considerazioni generali sul remote sensing. Gli scopi del remote sensing ed i blocchi principali che
costituiscono un sistema.
Struttura generale di un sistema di remote sensing. Considerazioni di tipo sistemistico.
Sorgente. Descrizione delle principali caratteristiche delle sorgenti di interesse per il remote
sensing.
Mezzi intermedi. Fra l’oggetto o lo spazio che si osserva ed il sistema di remote sensing, un mezzo
intermedio (ad es. aria) modifica le caratteristiche della radiazione che raggiunge lo strumento: si
analizzano i principali fenomeni.
Sistemi ottici. Tutti i sistemi ottici o elettroottici di remote sensing, utilizzano qualche tipo di
sistema ottico, sia per la trasmissione del segnale (nel caso dei sistemi attivi), che per la ricezione.
Vengono date le informazioni principali, per capire i motivi delle scelte.
Sensori. Vengono descritte le principali tecniche di ricezione di un segnale ottico, ed i principali
passi per la sua elaborazione.
Descrizione dei sistemi di remote sensing. Una descrizione sommaria dei sistemi di remote sensing
più utilizzati.
Immagini. Alcune immagini aiutano a capire quello che si può ottenere dai sistemi di remote
sensing.
2.Telemetri
3.Lidar
4.Sistemi radiometrici
5.Protezione da sorgenti laser
6.Appendici
Appendici: sette appendici approfondiscono alcuni temi di maggiore interesse. In particolare le
appendici riguardano: i laser, le sorgenti di luce, le camere termiche, la velocimetria laser, gli
interferometri di Fabry-Perot e alcune applicazioni satellitari.
7.Definizioni – Glossario. Allo scopo di comprendere il linguaggio in uso negli ambienti
specializzati nel remote sensing, vengono fornite le principali definizioni ed il significato dei
termini più utilizzati.
2
2 Applicazioni del ‘remote sensing’ ottico e elettro-ottico
Le tecniche di remote sensing hanno, come obiettivo, il rilevamento di qualche caratteristica fisica
di un oggetto remoto. La quantità fisica potrebbe essere una dimensione, una forma (ad esempio
una fotografia), una distanza, una velocità, una temperatura e, in casi più complessi, si può voler
riconoscere un oggetto remoto immerso in uno sfondo articolato (riconoscibile in base a molte
quantità fisiche che lo caratterizzano, misurate contemporaneamente), distinguendolo da altri
oggetti simili che presentino qualche caratteristica diversa (‘signature’). I sistemi ottici ed elettroottici di remote sensing si avvalgono, per lo svolgimento delle loro funzioni, di radiazioni
elettromagnetiche comprese nello spettro visibile, nel vicino e medio infrarosso e nell'ultravioletto,
cioè, con lunghezze d'onda comprese fra 0.3 µm e 14 µm. I sistemi "ottici" di remote sensing
differiscono da quelli "elettro-ottici", in quanto non hanno bisogno, per svolgere le proprie funzioni,
di componenti attivi che manipolino la radiazione elettromagnetica utilizzata. Esempi di sistemi
“elettro-ottici” sono: i laser, i sistemi di scansione, gli interruttori o modulatori elettro-ottici, ecc..
Casi tipici di sistemi “ottici” sono i rivelatori ottici passivi e la fotografia.
I vantaggi di questi sistemi sono legati alla lunghezza d’onda utilizzata che comporta, con
dimensioni ragionevoli delle ottiche, di avere bassa diffrazione e pertanto alta risoluzione angolare.
Le lunghezze d’onda che comportano una più bassa diffrazione sono quelle nell’UV in cui la
lunghezza d’ onda è più piccola.
(2.1)
Angolo( rad ) = k
λ
D
in cui D è la dimensione della pupilla, λ è la lunghezza d’onda e k è un fattore pari a 2.44 se si
considera un fascio Gaussiano e si applica il criterio di Rayleigh mostrato in figura 2.1. La relazione
mostrata è valida se si considera un foro circolare. La diffrazione si produce quando un’onda
rappresentativa di un punto dell’ immagine viene troncata dalla pupilla o da un foro. In questo
modo una parte del campo viene persa rendendo il campo dopo la pupilla limitato. La perdita del
campo è tanto più grande quanto minore è la dimensione della pupilla. Si deve considerare che
anche in presenza di pupilla infinitamente grande anche se da un punto di vista teorico la diffrazione
si dovrebbe ridurre a zero intervengono, di fatto, fenomeni aberrazionali che comunque limitano la
risoluzione ottenibile. I minimi della funzione coincidono con il centro degli anelli neri. La
larghezza angolare di 2.44 (λ/d) è relativa al diametro del primo cerchio, misurato fra i centri dei
minimi. I minimi della funzione coincidono con il centro degli anelli neri. La larghezza angolare di
2.44 (λ/d) è relativa al diametro del primo cerchio, misurato fra i centri dei minimi.
3
Il cerchio chiaro ha una larghezza angolare pari a :
sin θ R ≈ θ R = 2.44 (λ / d )
Due distinte sorgenti sono risolvibili se la loro
separazione angolare è pari a θR ≈ λ/d
Figura 2.1
Gli svantaggi dei sistemi che utilizzano l’ultravioletto o, comunque, lunghezze d’onda brevi, sono
dovuti alla non possibilità del loro utilizzo in tutte le condizioni meteorologiche poiché il mezzo
trasmissivo può limitarne fortemente le prestazioni.
Le forme più comuni di remote sensing ottico o elettro-ottico comprendono:
• Sistemi per la rivelazione della presenza (e/o l'identificazione) di oggetti remoti (radar
ottico, sistemi di scoperta, ecc.).
• Sistemi per la misura della distanza di oggetti remoti (telemetri – rangefinders).
• Sistemi per la misura della velocità di spostamento di oggetti remoti (anemometri e
velocimetri).
• Sistemi per l'imaging di oggetti remoti (telecamere, camere termiche, radar ottici, ecc.).
• Sistemi per la misura di caratteristiche fisiche di oggetti remoti (misura della temperatura,
della composizione chimica, della distribuzione di densità, ecc.).
3 Blocchi che costituiscono un sistema elettro-ottico.
Le parti di un sistema di remote sensing che devono essere prese in considerazione nella fase di
studio di sistema sono:
• La sorgente di radiazione.
• Il bersaglio o oggetto osservato.
• Il mezzo interposto fra oggetto e sistema elettro-ottico.
Il sistema elettro-ottico è, a sua volta, costituito da :
• Un sistema ottico di raccolta della radiazione.
• Un rivelatore.
• Un housing meccanico.
4
• Un'elettronica di condizionamento.
• Un'elettronica di elaborazione del segnale.
• Un output (display di informazioni, invio di informazioni ad altra strumentazione, ecc.).
Le precedenti funzioni si possono riassumere come segue:
• Una sorgente di radiazione o un’antenna, che ha il compito di raccogliere il segnale
proveniente dalla sorgente e convogliarlo sul rivelatore; nel caso ottico l'antenna è costituita,
di solito, da un obiettivo (potrebbe essere anche uno specchio).
• Un sistema ottico o elettro-ottico che applichi le modifiche volute al segnale ottico.
• Un rivelatore, che ha il compito di memorizzare (ad esempio la fotografia) o trasformare il
segnale raccolto in un segnale (di solito elettrico, normalmente analogico ma spesso
digitale) che possa essere memorizzato direttamente o previa elaborazione (ad esempio i
rivelatori fotonici o termici - fotodiodi, CCD, bolometri).
• Un sistema (generalmente elettronico) che elabori il segnale ricevuto (spesso un computer
dotato di un software adatto) per estrarre l'informazione cercata, dopo averla adattata o
trasformata (se necessario) perché l'elaborazione possa avere luogo. Un esempio tipico di
adattamento del segnale è la sua digitalizzazione, che ne permette l'elaborazione da parte di
computers. Uno dei casi più comuni è quello della digitalizzazione dei segnali provenienti
da un array di rivelatori (ad esempio un CCD) per la successiva elaborazione e la
presentazione dell'immagine elaborata su un display. La digitalizzazione è, spesso, applicata
anche alla fotografia (quando il rivelatore non è costituito da un CCD, attraverso la
scansione), per rendere elaborabili, attraverso un computer, le informazioni contenute
nell'immagine.
• Un sistema di presentazione dell'informazione raccolta (display o stampa fotografica) o di
trasferimento dei dati raccolti ad ulteriori sistemi di elaborazione, presentazione e/o
memorizzazione.
La rappresentazione grafica di tutte le parti che contribuiscono al funzionamento di un sistema (nel
nostro caso, di remote sensing, ma il concetto si applica a qualunque sistema) e dei legami che
intercorrono fra le varie parti, è lo schema a blocchi.
Ad esempio, per illustrare i legami fra la sorgente di radiazione, l’oggetto illuminato, l’ottica di
raccolta del segnale, il rivelatore, l’elettronica di condizionamento, l’elettronica di elaborazione del
segnale, il display e un sistema di memoria di massa (disco, nastro, stampante, ecc.) ci si avvale di
uno schema del tipo illustrato in figura 3.1.
5
Figura 3.1 – Schema a blocchi.
Tutti i sistemi di remote sensing, essendo, per definizione, destinati alla misura di quantità remote,
devono tenere conto delle caratteristiche del mezzo interposto (fra il sistema e l'oggetto osservato).
Il caso più comune è quello nel quale il mezzo interposto è aria. Dal punto di vista della trasparenza
spettrale dell'atmosfera, in prima approssimazione si può affermare che l'atmosfera è "trasparente"
dal vicino ultravioletto (0.35µm) al medio infrarosso (14 µm). La trasmissività dell'atmosfera segue,
come tutti i mezzi assorbenti, la "legge esponenziale dell'assorbimento", attribuita a J. Lambert (e
anche a P. Bouguer):
(3.1)
I x = I 0 ⋅ e −α ⋅ x
Dove I0 è l'intensità del segnale prima di attraversare il mezzo, Ix è l'intensità del segnale dopo aver
attraversato uno spessore x del mezzo, α è il "coefficiente di assorbimento" del mezzo (per una
particolare zona spettrale).
L'atmosfera è "trasparente" nell'intervallo spettrale indicato, cioè il suo coefficiente di assorbimento
è basso, ma non è trasparente nello stesso modo in tutto l'intervallo spettrale: agli estremi
ultravioletto ed infrarosso la trasparenza diminuisce. Inoltre, se si osserva la trasparenza spettrale
con grande risoluzione, si possono notare numerose "righe" di assorbimento. In pratica, se la
larghezza della zona spettrale di interesse è sufficientemente larga, l'effetto delle righe diviene
trascurabile. Se, viceversa, la zona spettrale di interesse è stretta, come, ad esempio, quando si
utilizza la luce monocromatica di una sorgente laser, è necessario verificare se la lunghezza d'onda
di interesse non coincida con una "riga" di assorbimento. Un'altra importante considerazione
riguarda lo spessore di atmosfera che deve essere attraversato dalla radiazione di interesse; quando
gli spessori di interesse sono relativamente piccoli (fino a distanze dell'ordine delle centinaia di
metri), gli effetti degli assorbimenti possono essere trascurabili. In questi casi, ci si deve aspettare
che la banda spettrale effettivamente trasmessa dall'atmosfera sia sensibilmente più larga di quella
relativa a distanze di chilometri. Questa considerazione è importante quando, ad esempio, si fa uso
di rivelatori la cui banda spettrale di sensibilità è estesa a zone nelle quali l'atmosfera perde la sua
trasparenza: in questi casi, se non sono stati inseriti opportuni filtri spettrali, il rivelatore potrebbe
fornire segnali relativi a zone spettrali che non devono essere prese in considerazione e che, quindi,
aumentano il rumore e peggiorano il rapporto segnale rumore SNR (Signal to Noise Ratio).
Un secondo, importante, effetto dell'atmosfera sulla radiazione che la attraversa, è la diffusione
(scattering) provocata dall'interazione fra la radiazione e le particelle presenti nell'atmosfera. Il caso
più vistoso è quello della presenza di nebbia o di fumo: quando le dimensioni delle particelle sono
uguali o minori della lunghezza d'onda della radiazione, l'interazione può essere così marcata, da
impedire il passaggio in linea retta della radiazione perché la diffusione avviene in tutte le direzioni;
se le dimensioni delle particelle sono più piccole della lunghezza d'onda della radiazione, questa
può essere trasmessa (in modo più o meno efficiente, a seconda del rapporto fra le dimensioni delle
particelle e la lunghezza d'onda). Naturalmente, la probabilità che un fascio di radiazione riesca ad
attraversare un banco di nebbia non dipende solo dal rapporto fra le dimensioni delle particelle e la
lunghezza d'onda, ma anche dalla densità delle particelle presenti: se la densità delle particelle è
sufficientemente bassa, qualche raggio potrebbe non essere intercettato. Il fenomeno della
diffusione, che dipende dal rapporto detto, spiega due fenomeni noti a tutti: il cielo blu e le nubi
bianche; il cielo blu è dovuto al fatto che la componente rossa della luce solare non viene
intercettata e diffusa dalle molecole che costituiscono l'aria (le cui dimensioni sono simili alle
lunghezze d'onda nel blu), cosa che accade, viceversa, per la parte blu dello spettro solare. Le
goccioline di acqua che costituiscono le nubi, hanno dimensioni più grandi di tutte le lunghezze
d'onda presenti nello spettro visibile; in questo caso tutta la luce solare visibile (bianca) viene
diffusa. Per lo stesso motivo le radiazioni utilizzate dai radar, che hanno lunghezze d'onda di
centimetri, vengono trasmesse senza notevoli attenuazioni dai banchi di nebbia e vengono
6
parzialmente riflesse dai banchi di pioggia. Le radiazioni nel medio infrarosso (8 ÷ 14 µm) possono
agevolmente attraversare alcuni tipi di banchi di nebbia, ma vengono fortemente diffuse da altri tipi
di banchi (nei quali le goccioline sono più grandi). I fenomeni di diffusione e di assorbimento
devono essere considerati contemporaneamente. Infatti, in alcuni casi, radiazioni di lunghezze
d'onda maggiori vengono trasmesse attraverso la nebbia peggio di radiazioni con lunghezze d'onda
minori; questa situazione si verifica quando le radiazioni con lunghezze d'onda maggiori vengono
fortemente assorbite mentre quelle con lunghezze d'onda minori vengono solo diffuse. Un caso
tipico si verifica, ad esempio, quando si fa uso di telemetri laser a CO2 (10.6 µm) o ad erbio (1.54
µm): la lunghezza d'onda dei laser a CO2 viene fortemente assorbita dall'acqua (che costituisce la
nebbia) ma viene poco diffusa; la lunghezza d'onda dei laser ad erbio viene poco assorbita ma
fortemente diffusa.
In figura 3.2 è mostrato il diverso comportamento di scattering di particelle in accordo con le loro
dimensioni in relazione alla lunghezza d’onda utilizzata. Lo scattering di Rayleigh si verifica per
dimensioni delle particelle più piccole della lunghezza d’onda mentre lo scattering di Mie interviene
per lunghezze d’onda comparabili con la circonferenza delle particelle che la radiazione incontra sul
suo cammino.
Figura 3.2
Dalla lunghezza delle frecce, poiché il disegno non è in scala, appare che lo scattering di Reyleigh è
il più efficiente. In realtà, a parità di segnale incidente, lo scatering di Reyleigh è più piccolo.
Un altro effetto importante dell'atmosfera sulla radiazione che la attraversa è dovuto alle turbolenze.
Quando, in seguito alla presenza di venti, di oggetti in movimento che attraversano l'atmosfera o
alla presenza di forti gradienti termici (come quando il sole riscalda l'asfalto di una strada) si
generano turbolenze nell'aria, gli addensamenti o le rarefazioni localizzate dell'atmosfera provocano
variazioni dell'indice di rifrazione dell'aria. Un raggio di luce, che in un mezzo isotropo si propaga
in linea retta, viene deviato per effetto di queste variazioni di indice di rifrazione. Se si vuole
osservare, ad esempio, una stella, le turbolenze, sempre presenti nei vari strati dell'atmosfera,
impediscono la formazione di un'immagine nitida, e ne provocano lo "scintillamento". Il "seeing",
cioè le deviazioni angolari che l'atmosfera "calma" provoca sui fasci di luce che la attraversano
lungo la verticale, sono dell'ordine di 50 µrad. I gradienti termici dovuti al forte riscaldamento del
suolo irradiato dal sole, provocano i ben noti fenomeni del "miraggio" e della "fata Morgana".
Alcuni dei problemi provocati dalle turbolenze atmosferiche ai sistemi di remote sensing si possono
superare con i sistemi C.O.A.T. (Coherent Optical Adaptive Technique)
Nel caso in cui il mezzo interposto sia, ad esempio, acqua marina, si applicano considerazioni simili
a quelle atmosferiche, con qualche differenza: la banda di trasparenza spettrale è molto più ridotta
(con un massimo nel verde; nell'acqua distillata il massimo di trasparenza si trova nel blu - 0.48
µm); l'acqua è un liquido, ed è, quindi, incomprimibile: non si possono generare disomogeneità di
7
indice di rifrazione dovute alle turbolenze, ma possono esistere gradienti di indice di rifrazione
dovuti ad effetti termici (correnti fredde o calde). Disomogeneità possono verificarsi quando
nell'acqua sono presenti liquidi non solubili, di indice di rifrazione diverso da quello dell'acqua (ad
esempio olii). La presenza di molte particelle solide sospese nell'acqua accentua fortemente il
fenomeno della diffusione. L'indice di rifrazione dell'acqua è sensibilmente maggiore di quello
dell'aria (acqua circa 1.34, aria 1).
In figura 3.3 e 3.4 è mostrato il comportamento dell’ atmosfera alle varie lunghezze d’onda. e in
particolare sono anche indicati i differenti componenti chimici che ne condizionano la trasmittanza.
Figura 3.3 – Trasmittanza atmosferica in funzione della lunghezza d’ onda
Figura 3.4 – Trasmittanza atmosferica in funzione della lunghezza d’ onda
4 Classificazione dei sistemi Elettro-Ottici
Si deve, innanzi tutto, distinguere fra sistemi attivi e sistemi passivi.
Nei sistemi attivi la radiazione utilizzata è generata allo scopo di permettere il funzionamento del
sistema elettro-ottico (sorgenti laser nei Lidar, nei radar ottici, nei sistemi di telecomunicazione a
fibre ottiche, nei sistemi integrati fotonici, flash o illuminatori nella fotografia e nella
cinematografia, illuminatori nei microscopi ottici, ecc.).
Nei sistemi passivi la radiazione utilizzata non ha come scopo il funzionamento del sistema elettroottico, ma lo rende possibile (ad esempio, luce solare nella fotografia e nella cinematografia senza
l’ausilio di flash o di illuminatori).
Una seconda suddivisione raggruppa i sistemi a seconda della zona spettrale di funzionamento :
• lunghezze d'onda fino a 0.4 µm (ultravioletto);
8
•
•
•
lunghezze d'onda comprese fra 0.4 e 2.5 µm (visibile e vicino infrarosso);
lunghezze d'onda comprese fra 2.5 e 3.5 µm (vicino e medio infrarosso);
lunghezze d'onda comprese fra 3.5 e 5 µm (medio infrarosso – prima finestra
atmosferica) ;
• lunghezze d'onda comprese fra 5 e 8 µm (medio infrarosso) ;
• lunghezze d'onda comprese fra 8 e 14 µm (medio infrarosso – seconda finestra
atmosferica) ;
• lunghezze d'onda oltre 14 µm (lontano infrarosso);
Questa suddivisione è necessaria per la diversità dei materiali utilizzati per i sistemi ottici ed elettroottici e per le diverse caratteristiche dei rivelatori utilizzabili.
• Una terza suddivisione riguarda i fenomeni connessi con la larghezza di banda spettrale
della radiazione utilizzata (coerenza temporale). I principali fenomeni interessati riguardano
l'interferenza in tutte le sue manifestazioni, fra le quali, ad esempio, lo speckle.
• Una quarta suddivisione riguarda i fenomeni connessi con la coerenza spaziale della
radiazione utilizzata. La coerenza spaziale produce fenomeni quando radiazioni provenienti
da zone diverse di uno stesso oggetto, sovrapponendosi, danno luogo a fenomeni di
interferenza.
• Una quinta suddivisione riguarda il tipo di tecnica utilizzata per la rivelazione del segnale
utile (rivelazione diretta, eterodina, photon counting, ecc.).
La suddivisione in categorie appena data serve, a chi deve progettare o acquisire un sistema ottico o
elettro-ottico, o utilizzare un sistema o un componente disponibile, per prendere in considerazione
tutti gli aspetti sotto i quali il sistema o il componente deve essere valutato.
5 I sistemi ottici
Sono considerati sistemi ottici quelli nei quali i fenomeni prevalenti sono di natura geometrica (la
diffrazione, di cui si parlerà in seguito, è, spesso, trascurabile) e/o lo spettro delle radiazioni
considerate viene visto con rivelatori che non sono in grado di seguire le singole oscillazioni del
campo elettromagnetico ma ne seguono solo l'inviluppo e l'effetto integrato nel tempo. I principi
dell'ottica, tuttavia, si applicano a tutte le radiazioni di tipo elettromagnetico, ma alcuni fenomeni
fisici (ad esempio gli indici di rifrazione nella zona dei raggi X e la diffrazione nella zona delle
microonde) rendono preminenti aspetti che sono trascurabili nei sistemi "ottici" e impongono
metodi di manipolazione e rivelazione diversi.
Un sistema ottico raccoglie la radiazione proveniente da un oggetto (che la emette o riflette o
diffonde la radiazione emessa da una sorgente esterna) e ne modifica le caratteristiche geometriche,
dando luogo ad una immagine. Più in generale, la radiazione presente nello spazio che precede il
sistema ottico (spazio oggetto) viene trasformata nella radiazione che lo segue (spazio immagini).
Le radiazioni che interessano l’ottica sono di tipo elettromagnetico: un campo elettrico che oscilla
in modo sinusoidale ed un campo magnetico ad esso associato, anch’esso sinusoidale. La distanza
che separa due oscillazioni consecutive si chiama lunghezza d’onda.
La radiazione si propaga, nel vuoto, in linea retta, ad una velocità di circa 3 •105 Km/sec. La
frequenza della radiazione è il numero di oscillazioni che transitano per un punto dello spazio in un
secondo (Hertz).
Le lunghezza d'onda (il "colore") delle radiazioni elettromagnetiche che interessano quelli che
vengono normalmente considerati "sistemi ottici o elettro-ottici" sono comprese fra circa 1 nm (109
metri → 3 • 1017 Hz) e 15 µm (15 10-6 metri → 2 • 1013 Hz). Talvolta lo spettro si allarga fino a
comprendere un intervallo che va da 1 Å (10-10 metri →3 • 1018 Hz) a 1 mm (3 • 1011 Hz). I vari
intervalli spettrali sono, convenzionalmente, suddivisi fra:
9
•
•
•
•
•
•
raggi X (0.1 nm [1Å] ÷ 1 nm → 3 • 1018 Hz ÷ 3 • 1017 Hz),
ultravioletto - UV (1 nm ÷ 400 nm → 3 • 101717 Hz ÷ 7.5 • 1014 Hz),
visibile - VIS (400 nm ÷ 750 nm → 7.5 • 1014 Hz ÷ 4 • 1014 Hz),
infrarosso vicino - IR (750 nm ÷ 3 µm → 4 • 1014 Hz ÷ 1 • 1014 Hz),
infrarosso medio - IR (3 µm ÷ 30 µm → 1 • 1014 Hz ÷ 1 • 1013 Hz)
infrarosso lontano - IR (30µm ÷ 1 mm → 1 • 1013 Hz ÷ 3 • 1011 Hz).
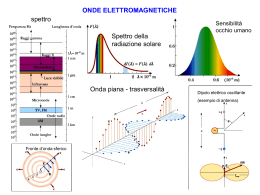
In figura 5.1 è mostrato lo spettro delle radiazioni elettromagnetiche
γ = Raggi gamma
HX SX = Raggi X
Regione ottica
EUV=Extreme Ultra Violet
NUV=Near Ultra Violet
NIR=Near Infra Red
MIR=Medium Infra Red
FIR=Far Infra Red
Microonde, onde radio e basse frequenze
EHF = Extremely High Frequency (Microwaves)
SHF = Super High Frequency (Microwaves)
UHF=Ultra High Frequency
VHF = Very High Frequency
HF = High Frequency
MF = Medium Frequency
LF = Low Frequency
VLF = Very Low Frequency
VF = Voice Frequency
ELF = Extremely Low Frequency
10
Figura 5.1
Fra il near infrared e il near ultra violet vi è lo spettro del visibile mostrato in figura 5.2
colore
rosso
arancio
giallo
verde
celeste
blu
Intervallo di lunghezza d’ onda
Intervallo di frequenza
~ 625-740 nm
~ 590-625 nm
~ 565-590 nm
~ 520-565 nm
~ 500-520 nm
~ 450-500 nm
~ 480-405 THz
~ 510-480 THz
~ 530-510 THz
~ 580-530 THz
~ 600-580 THz
~ 670-600 THz
Figura 5.2
I concetti dell’ottica si applicano anche alle lunghezze d’onda maggiori (ad es. microonde, purché si
tratti di onde elettromagnetiche) di quelle indicate, ma i sistemi ottici adatti al loro utilizzo hanno
caratteristiche diverse (ad es. Radar)
6 Caratteristiche dei segnali ottici
Le caratteristiche e le proprietà della luce che hanno interesse per i sistemi ottici o elettro-ottici sono
le seguenti :
• Velocità di propagazione nei mezzi: indice di rifrazione.
• Assorbimento e diffusione (scattering).
• Lunghezza d'onda (frequenza del campo elettromagnetico).
• Stato di polarizzazione.
La velocità di propagazione della luce dipende dal mezzo nel quale si trova: il rapporto fra la
velocità in un mezzo e quella nel vuoto definisce l'indice di rifrazione del mezzo stesso. La velocità
di propagazione della luce in un mezzo varia con la lunghezza d'onda; quindi anche l'indice di
rifrazione varia con la lunghezza d'onda. Nel vuoto l'indice di rifrazione è unitario ed uguale per
tutte le lunghezze d'onda. Nei vetri utilizzati nello spettro visibile, l’indice di rifrazione varia fra
circa 1.4 e circa 2. L'indice di rifrazione è una delle proprietà fondamentali dei mezzi utilizzati per
la realizzazione dei sistemi ottici.
Le radiazioni elettromagnetiche possono essere considerate, per la spiegazione di alcuni
comportamenti riguardanti l’interferenza, oscillazioni sinusoidali di un campo elettrico e di un
campo magnetico ad esso associato, che si propagano nel vuoto, alla velocità della luce “c” (c ≅ 3
108 m/sec). Per altri comportamenti le radiazioni elettromagnetiche sono considerate costituite da
“fotoni”, da oscillazioni, cioè, di un campo elettromagnetico, limitate in energia e durata, dotati di
una polarizzazione e di una frequenza, che viaggiano nello spazio alla velocità della luce.
L’energia di un fotone Wf (in elettron-volt) è data da:
(6.1) Wf = hν
dove h è la costante di Planck (6.62 10-34 [watt sec2 ] o anche 4.1 [µeV •GHz-1]) e ν è la frequenza
in Hertz.
11
(6.2) λ = c/ν = hc/Wf = 1.24/Wf
dove λ è in µm (si ricordi che la carica dell’ elettrone ‘e’ vale 1.6021 •10-19 Coulomb e l’ elettron
volt è pari a 1.6021 •10-19 W•sec).
Nell'attraversare un mezzo la radiazione elettromagnetica interagisce con le molecole e con gli
atomi che costituiscono il mezzo stesso. Parte dei "fotoni" che costituiscono la radiazione stessa può
essere assorbita o diffusa dai costituenti il mezzo; questo fenomeno riduce l'intensità della
radiazione ma non altera l'energia associata a ciascun fotone: la lunghezza d'onda non viene alterata.
I fenomeni dell'assorbimento e della diffusione sono fenomeni statistici che non hanno nessuna
influenza sulla lunghezza d'onda della radiazione. La lunghezza d'onda è data dalla lunghezza
percorsa dalla radiazione nell'unità di tempo, divisa per la frequenza della radiazione stessa : varia,
quindi, a seconda del mezzo nel quale la radiazione si trova perché cambia il tratto percorso
nell'unità di tempo. Quindi, se la radiazione attraversa mezzi con indici di rifrazione diversi, la sua
lunghezza d'onda, all’interno del mezzo, varia con il mezzo nel quale si trova. Se, come succede
nella maggior parte dei casi, la radiazione passa dall'aria in un mezzo di indice di rifrazione
maggiore (ad esempio vetro) e torna in aria, le sue lunghezze d'onda iniziale e finale coincidono. I
sistemi ottici non alterano la lunghezza d'onda della radiazione, a meno che non intervengano
fenomeni particolari (ad esempio l'effetto Doppler). La "banda passante", cioè la zona spettrale
entro la quale la trasparenza del mezzo è sufficientemente alta da permettere la realizzazione di
sistemi in grado di soddisfare i requisiti applicativi, definisce i limiti spettrali di applicabilità del
mezzo considerato.
La radiazione elettromagnetica è caratterizzata anche dal modo di oscillare del campo elettrico, cioè
dalla sua polarizzazione. Ciascun fotone ha un proprio modo di oscillare. Quando, in un fascio di
radiazione, possono coesistere fotoni con tutti i possibili modi di oscillare (perché non esiste un
modo privilegiato), si dice che la radiazione non è polarizzata. Quando, viceversa, esiste un insieme
di modi di oscillare privilegiati (ad esempio in un piano, entro un piccolo intervallo angolare di
orientamento), si dice che la radiazione è polarizzata. In alcuni mezzi (in particolare in molti
cristalli) l'indice di rifrazione varia con l'orientamento della polarizzazione della radiazione.
La polarizzazione della radiazione non è solamente lineare (cioè che oscilla in un piano) ma può
anche essere circolare o ellittica (il vettore elettrico ruota intorno alla direzione di propagazione: se
la sua lunghezza rimane costante per 360°, la polarizzazione è circolare, se varia di lunghezza
passando da un asse ad uno ad esso perpendicolare, la polarizzazione è ellittica). L'asse maggiore
dell'ellissi può essere orientato in modo qualsiasi). La figura 6.1 mostra i vari tipi di polarizzazione.
12
Figura 6.1 – Tipi di polarizzazione: lineare, circolare destrogira, circolare levogira, ellittica
destrogira, ellittica levogira.
Il vettore elettrico, rappresentato nella figura 6.1, appartiene ad una radiazione che si propaga
perpendicolarmente al foglio, nella direzione dell’osservatore. La polarizzazione può essere lineare,
circolare destrogira, circolare levogira, ellittica destrogira, ellittica levogira. In figura 6.2 è mostrata
una radiazione elettromagnetica lineare, circolare ed ellittica.
Polarizzazione lineare
Circolare
Ellittica
Figura 6.2
Anche l'assorbimento e la diffusione possono dipendere dallo stato di polarizzazione. Un esempio
tipico è dato dai polarizzatori "dicroici" (i comuni Polaroid) che assorbono la radiazione polarizzata
in un piano e trasmettono quella polarizzata in un piano ortogonale. Lo stato di polarizzazione di
una radiazione può essere alterato sfruttando, ad esempio, la "birifrangenza", cioè la differenza di
indice di rifrazione che alcuni mezzi presentano in funzione dello stato di polarizzazione. Questo
avviene, ad esempio, quando si invia una radiazione polarizzata linearmente in un cristallo
birifrangente, con il piano di polarizzazione orientato in modo che la radiazione venga suddivisa in
due fasci orientati ortogonalmente fra di loro, che viaggiano, all’interno del cristallo, sovrapposti,
ma con velocità diverse: all’uscita dal cristallo le fasi delle oscillazioni dei due fasci in generale non
coincidono; di conseguenza la ricombinazione dei due fasci dà luogo ad un fascio con
caratteristiche di polarizzazione diverse (in generale ellittiche, che presentano, come casi particolari,
la polarizzazione lineare e quella circolare). Lo stato di polarizzazione può assumere una notevole
importanza in alcuni sistemi ottici che possono presentare fenomeni di birifrangenza (ad esempio
13
indotta da stress meccanici o termici), o che devono manipolare fasci fortemente polarizzati (ad
esempio la radiazione di alcuni laser). Ad esempio, un fascio di radiazione non polarizzata (che
contiene, quindi, tutti i possibili modi di oscillare) che attraversa un componente ottico birifrangente
(ad esempio per effetto di uno stress meccanico), può venire diviso in due fasci indipendenti con
polarizzazioni ortogonali, che viaggiano in direzioni diverse.
Le caratteristiche di lunghezza d'onda e di polarizzazione della radiazione e le proprietà di
assorbimento e diffusione dei materiali, hanno anche una notevole rilevanza nel caso di sistemi
riflessivi o catadiottrici (misti riflessivi e rifrattivi).
Una distinzione importante, ai fini dei fenomeni ottici, deve essere fatta fra la luce "temporalmente
coerente" e la luce "temporalmente incoerente". La prima è, ad esempio, quella prodotta dalle
sorgenti laser (ma non solo). La seconda, che è anche la più comune, è, ad esempio, quella prodotta
dalle lampade ad incandescenza o dal sole come mostrato in figura 6.3.
Figura 6.3
La differenza, dal punto di vista fisico, consiste nella larghezza di banda; il campo elettromagnetico
che costituisce la radiazione luminosa è sempre il risultato dalla somma, in ampiezza e fase, di
infinite oscillazioni sinusoidali di lunghezza d'onda diversa, infinitamente lunghe, di tutte le
lunghezze d'onda contenute nello spettro della radiazione. Se la larghezza di banda fosse
infinitamente stretta (radiazione monocromatica), il campo sarebbe attribuibile ad una sola
oscillazione sinusoidale di lunghezza infinita. Nella realtà una simile radiazione non esiste: la banda
può essere stretta ma è sempre di larghezza finita (radiazione policromatica); mentre in una
radiazione monocromatica esiste sempre una relazione costante nel tempo fra le fasi di tutti i punti
lungo il suo cammino, se questa è policromatica, la lunghezza (o, in modo equivalente, il tempo)
entro la quale esiste una relazione di fase fra i vari punti dell'oscillazione diviene tanto più breve,
quanto più larga è la banda spettrale. Si supponga di sommare, in ampiezza e fase, due o più
radiazioni monocromatiche di lunghezze d'onda, e, quindi, di frequenza diverse. Se ad un certo
istante tutte le radiazioni sono in fase tra loro, in un tempo successivo, le due radiazioni con la
maggiore differenza di lunghezza d'onda saranno in opposizione di fase e, quindi, si annulleranno
reciprocamente. Man mano che il tempo passa, lo stesso fenomeno si verificherà per tutte le
radiazioni presenti. Il tempo ∆t entro il quale si definisce il "tempo di coerenza" di una radiazione è
definito dalla seguente relazione
(6.3) ∆l = c∆t ≅ c/∆ν = (λ0 )2 / ∆λ0
dove ∆l è la "lunghezza di coerenza", "c" è la velocità della luce (3 •1014 µm/sec), "∆ν" è la
larghezza di banda in frequenze, "λ0" è la lunghezza d'onda media e "∆λ0" è la larghezza di banda
14
in lunghezze d'onda. La fig. 6.4 mostra l’effetto della sovrapposizione di due oscillazioni
sinusoidali, inizialmente in fase.
Figura 6.4
Con una larghezza di banda di circa 0.5 µm in lunghezze d'onda (la larghezza dello spettro visibile,
tipica di una lampada ad incandescenza vista dall'occhio umano), assumendoλ0=0.5 µm, si ottiene
∆l ≅ 0.5 µm. Se si considera la radiazione emessa da un LED, che, tipicamente, ha una larghezza di
banda ∆λ0 = 0.15 µm, centrata a 0.5 µm, si ottiene ∆l = 1.7 µm. La lunghezza di coerenza delle
righe emesse da una lampada al sodio è di circa 8 cm, quella di un laser He-Ne singolo modo può
arrivare a qualche chilometro.
L'importanza pratica della coerenza temporale è, prevalentemente, legata alla possibilità di
interferenza: quando si sovrappongono le radiazioni provenienti da una stessa sorgente ma prelevate
in tempi diversi, se la radiazione emessa dalla sorgente si è mantenuta coerente durante il tempo
intercorso fra i due prelievi, il campo generato è effetto della somma, in ampiezza e fase dei due
contributi: le due radiazioni interferiscono fra loro. Se, viceversa, il ritardo fra i due prelievi eccede
la "lunghezza di coerenza" della radiazione, non si verifica nessuna interferenza.
In modo analogo si definisce la coerenza spaziale: se la radiazione prelevata nello stesso istante da
due zone diverse dello spazio circostante la sorgente interferisce dopo la sovrapposizione, la
sorgente è "spazialmente coerente".
Un modo di conciliare la doppia natura della radiazione luminosa (ondulatoria e corpuscolare) è di
pensare a un pacchetto d’onda (quanto di energia). Infatti se si pensa alla natura ondulatoria si pensa
ad un’onda elettromagnetica sinusoidale che si propaga nello spazio. Tale onda non ha un principio
e una fine. Se si compongono differenti onde elettromagnetiche queste possono produrre un
pacchetto d’onda. In tal modo un fotone o un elettrone libero di propagarsi pensato come un
pacchetto d’onda possiede ambedue le proprietà ondulatoria e corpuscolare essendo questa ultima
associata alla posizione spaziale e alla larghezza del pacchetto. In questo modo si sono utilizzate
molteplici onde per descrivere una entità localizzata e quindi una particella. Un’analisi più
approfondita impatta sul principio di indeterminazione (Heisenberg), la formula di de Broglie,
leffetto fotoelettrico spiegato da Einstein, che sono al di fuori dello scopo di questa descrizione.
Limitando alla descrizione del fotone mediante un pacchetto d’onda si può caratterizzare la
coerenza spaziale e temporale come mostrato in figura 6.5.
15
La correlazione di una onda di luce in due punti
dello spazio e del tempo è pari a:
<Γ(x1,t1;x2,t2)>=<E(x1,t1)E(x2,t2)>
Coerenza temporale (longitudinale)
Γ=<Ea (t)Eb* (t) >
Coerenza spaziale (laterale)
Γ=<Ec (t)Ed* (t) >
Ec
Ed
Ea
Eb
Figura 6.5
La coerenza spaziale impatta con la presenza di fronti d’onda che hanno la stessa direzione e come
conseguenza una bassa divergenza del fascio ottico come mostrato in figura 6.6.
Ec
Ed
Coerenza spaziale buona
Coerenza spaziale scadente
Piano di fase costante
Figura 6.6
16
Commento: Andrebbe data
qualche spiegazione. Come
minimo bisognerebbe dare il
significato dei simboli utilizzati.
La coerenza temporale impatta sulla coerenza di fase in punti temporalmente differenti come
mostrato in figura 6.7 e 6.8. Come è visibile dalle figure una buona coerenza temporale provvede a
una linea spettrale molto stretta.
Ea
Eb
Figura 6.7
τc
I
∆υ
υ
Figura 6.8
In figura 6.9 , 6.10 e 6.11 sono riassunte le due condizioni di coerenza spaziale e temporale.
17
t
ν
FWHM
t
ν
t
ν
Figura 6.9
Sorgenti incoerenti:
Atomi o molecole irradiano
incoerentemente o in modo casuale
Sorgenti coerenti:
Atomi e molecole irradiano
coerentemente con identica
fase,direzione ed energia fotonica
18
Luce coerente
Luce parzialmente coerente
Luce incoerente
Figura 6.11
7 Definizione di immagine.
Occorre, innanzi tutto, definire che cosa si intende per “immagine”. L’immagine è la ricostruzione
di una vista di un oggetto, ottenuta mediante quei raggi di luce che partono dalla sua superficie (o
perché emessi dall’oggetto stesso o perché diffusi o riflessi dalla sua superficie) o che esistono nello
spazio e, dopo essere stati raccolti da un sistema ottico, vengono, da questo, convogliati in posizioni
geometricamente simili a quelle dei punti da cui i raggi sono partiti. Un sistema ottico atto alla
formazione di un’immagine raccoglie i fasci di luce che divergono da ciascun punto dell’oggetto e
li trasforma in fasci che convergono in altri punti (o divergono da altri punti), producendone, così,
una immagine; se il fascio converge in un punto dopo essere passato per il sistema ottico,
l’immagine prodotta è “reale”, ed è possibile raccoglierla su uno schermo; se il fascio diverge dal
punto, l’immagine prodotta è “virtuale”, è situata nello “spazio immagini” del sistema ottico, ma
appare provenire da un oggetto posto nello “spazio oggetto”. La figura 7.1 e illustra la formazione
di un’immagine reale e di un’immagine virtuale.
19
Figura 7.1 – Immagini virtuale e reale.
Due punti sono “coniugati” quando uno è l’immagine dell’altro.
Fenomeni ottici
I fenomeni ottici principali dei quali si deve tenere conto nelle applicazioni dei sistemi ottici sono i
seguenti:
1) Rifrazione.
2) Riflessione.
3) Diffrazione.
4) Interferenza.
5) Diffusione.
6) Polarizzazione.
7) Coerenza temporale e coerenza spaziale.
Rifrazione
La velocità diminuisce quando la radiazione elettromagnetica (la luce) attraversa mezzi più o meno
densi. Il rapporto fra la velocità nel vuoto e quella nel mezzo è l’indice di rifrazione del mezzo.
La velocità di propagazione della luce dipende dal mezzo nel quale si trova: il rapporto fra la
velocità nel vuoto e la velocità in un mezzo definisce l'indice di rifrazione del mezzo stesso. Nel
vuoto l'indice di rifrazione è unitario ed uguale per tutte le lunghezze d'onda.
La rifrazione è un fenomeno conseguente alla diversa velocità di propagazione della luce quando si
propaga in mezzi con indici di rifrazione diversi: diminuisce al crescere dell’indice di rifrazione del
mezzo nel quale si trova; in generale la velocità della luce è tanto più bassa, quanto più denso è il
mezzo in cui si propaga (e che ha un indice di rifrazione maggiore). Un fascio di luce che passa da
un mezzo meno denso (ad esempio, aria) in un mezzo più denso (ad esempio, vetro), cambia la sua
velocità di propagazione e, in certe condizioni, la sua direzione. Supponiamo, ad esempio, che un
fronte d’onda piano incida, con un angolo α, su una superficie di separazione piana, fra due mezzi
di indice di rifrazione diversi (come, ad esempio, aria e vetro). Si verifica la situazione illustrata in
figura 7.2.
20
Figura 7.2
Quando uno degli estremi di un fronte d’onda (piano in figura 7.2) penetra in un mezzo di indice di
rifrazione maggiore (vetro nella figura), rallenta la sua velocità; la parte di fronte d’onda che non è
ancora penetrata nel mezzo di indice di rifrazione maggiore mantiene la sua velocità (più elevata).
Come conseguenza, quando l’intero fronte d’onda è penetrato nel mezzo di indice di rifrazione
maggiore, il fascio di luce di cui fa parte, ha cambiato direzione. Se il fronte d’onda è parallelo alla
superficie di interfaccia fra i due mezzi (i raggi incidono perpendicolarmente alla superficie), la
direzione non cambia. La mutata velocità di propagazione provoca anche un cambiamento nella
distanza fra i fronti d’onda: cambia, cioè, la lunghezza d’onda. Se, però, il fascio torna in aria, la
direzione e la lunghezza d’onda tornano quelle precedenti all’ingresso nel vetro; solo la posizione
laterale cambia. Lo spostamento “d” (nel caso di una lamina piano-parallela come mostrato in
figura 7.3) è dato da:
(7.1)
cos φ
d = t sin φ (1 − nn' cos
φ')
dove φ è l’angolo di incidenza (rispetto alla normale al vetro) ed n e n’ sono, rispettivamente, gli
indici di rifrazione dell’aria e del vetro.
Figura 7.3
Se i raggi non sono paralleli lo spessore della lamina provoca uno spostamento longitudinale della
loro origine (fig. 7.4). La distanza Q – Q’ è data da:
n
(7.2) QQ' = t (1 − ) .
n'
21
Figura 7.4
L’effetto complessivo, nel caso di una lamina inclinata, è mostrato in fig. 7.5.
Figura 7.5
Riflessione
La riflessione si verifica ogni volta che un fascio di luce incontra una superficie di separazione fra
due mezzi di indice di rifrazione diverso, a condizione che la granulosità della superficie di
separazione sia grande o piccola rispetto alla lunghezza d’onda della luce. Quando la granulosità è
pressoché uguale alla lunghezza d’onda della luce, si ha il fenomeno della diffusione (1). Ad
esempio, alcuni tipi di nebbia diffondono fortemente la luce visibile, ma lasciano passare
indisturbata una radiazione nel medio e lontano infrarosso (di lunghezza d’onda maggiore); un vetro
smerigliato a grana molto fine, può essere un buon diffusore per la luce visibile ed uno specchio per
radiazione infrarossa. Gli specchi utilizzati per la radiazione la cui cortissima lunghezza d’onda
rientra nella zona dei raggi X, possono funzionare solo per incidenza radente, perché la rugosità
apparente sia sufficientemente piccola.
L’ampiezza del segnale riflesso dipende dalle caratteristiche dei mezzi coinvolti. L’angolo di
riflessione è uguale all’angolo di incidenza della luce (fig. 7.6).
Figura7.6
Diffrazione
La diffrazione è un fenomeno che si presenta quando un fronte d’onda ha una estensione finita (le
sue dimensioni, in un piano perpendicolare alla direzione di propagazione, non sono infinite,
qualunque sia stata la causa della limitazione). L’effetto della diffrazione è tanto più grande, quanto
più piccola è l’estensione del fronte d’onda. Il caso tipico è quello che avviene quando un fronte
1
Fundamentals of Optics – F.A. Jenkins, H.E. White – McGraw-Hill 1957 – pag. 446
Principles of Optics – M. Born, E. Wolf – Pergamon Press 1965 – pag. 633
22
d’onda è parzialmente intercettato da un diaframma, che ne limita le dimensioni. Il fenomeno si
spiega, in modo intuitivo, con il “principio delle onde elementari”(fig. 7.7).
Figura 7.7
Tutti i punti di un fronte d’onda si comportano come sorgenti puntiformi, da cui partono onde
sferiche; il fronte d’onda risultante, dopo il diaframma, è dato dall’inviluppo di tutti i fronti d’onda
che sono passati attraverso il foro: i raggi, che sono le perpendicolari ai fronti d’onda, sono paralleli
tra loro nella parte centrale, ma divergono ai bordi. L’effetto della diffrazione è, principalmente,
quello di aumentare la divergenza dei fasci di luce. Si deve notare che l’inviluppo dei fronti d’onda
rappresenta la distribuzione di ampiezza del campo elettromagnetico; in base a questa
rappresentazione ci si dovrebbe aspettare che l’intensità dell’illuminazione su un qualsiasi piano
perpendicolare alla direzione di propagazione della luce, fosse omogenea e la zona illuminata si
andasse allargando in funzione della distanza. In realtà, per effetto dell’interferenza fra i fronti
d’onda generati in punti diversi dello stesso fascio, la distribuzione delle ampiezze, e, quindi, delle
intensità, non è omogenea ma è costituita da un massimo centrale e da numerosi massimi secondari,
angolarmente spostati. Quando il fascio è circolare o è limitato da un diaframma circolare, la
distribuzione delle intensità ha una distribuzione circolare, centrata sull’asse di simmetria del
fascio; la semi-ampiezza angolare (l’angolo rispetto all’asse) che comprende il massimo centrale
(compresa, quindi, entro il primo minimo anulare) è dato dalla semplice formula:
1.22λ
(7.3)
D
dove λ è la lunghezza d’onda della luce e D è il diametro del fascio circolare. Se il fascio non è
circolare, si applicano formule diverse.
Questa formula è della massima importanza perché con essa si calcola il diametro minimo dello
spot formato da un sistema ottico. Quando la sorgente è puntiforme, qualunque sia la distanza dal
sistema ottico alla quale si forma l’immagine, la formula data, moltiplicata per la distanza da piano
principale alla quale si forma l’immagine, fornisce il raggio minimo che l’immagine può assumere
(la formula data fornisce il semiangolo di diffrazione, espresso in radianti). Per quanto il sistema
ottico sia ben corretto e ben realizzato, non è mai possibile ottenere un punto-immagine più piccolo
di quello calcolato con la formula sopra menzionata. Quello indicato è il raggio dello spot, tenendo
conto del primo minimo dell’immagine di diffrazione (che, peraltro, contiene la maggior parte
dell’energia).
È importante notare che il fenomeno della diffrazione è alla base del comportamento di tutti i fasci
di radiazione elettromagnetica; ad esempio, quando un fascio di luce illumina una superficie
smerigliata la cui superficie non si possa considerare “liscia” per la lunghezza d’onda della
23
radiazione e non la si possa, quindi, considerare uno specchio (quando la distanza fra le
discontinuità della superficie è minore della lunghezza d’onda, la superficie è speculare per quella
lunghezza d’onda e per tutte quelle più lunghe), ciascun punto della superficie stessa si comporta
come un diaframma che limita il fronte d’onda retro-riflesso, che, di conseguenza, diverge per
effetto della diffrazione.
Un altro caso in cui la diffrazione svolge un ruolo importante, è quello della microscopia: il fronte
d’onda generato, per diffrazione, da ciascun punto di un oggetto da osservare al microscopio,
contiene tutte le informazioni relative alle caratteristiche dell’oggetto stesso; in principio, per la
formazione “fedele” dell’immagine dell’oggetto, l’ottica del microscopio dovrebbe raccogliere
l’intero fronte d’onda diffratto; gli obiettivi da microscopio non sono in grado di raccogliere l’intero
fronte d’onda, che si estende per 180°, ma cercano di raccogliere l’angolo più ampio possibile, e
vengono, per questo motivo, progettati in modo da disporre della massima NA possibile. In
particolare, gli obiettivi per microscopio destinati alla formazione di immagini molto ingrandite (ad
esempio 100 x) vengono fatti lavorare “ad immersione”; viene, cioè, inserito, fra obiettivo e
campione da esaminare, un liquido, il cui indice di rifrazione consente di massimizzare l’angolo che
i raggi provenienti dal campione formano con l’asse ottico dell’obiettivo del microscopio, e, quindi,
l’NA.
Figura 7.5 – Effetto di un liquido di immersione sui raggi che penetrano nel microscopio.
Il liquido introdotto fra l’obiettivo ed il campione osservato, grazie alla rifrazione, entro lo stesso
angolo di raccolta del microscopio invia un angolo maggiore dei raggi provenienti dal campione. In
questo modo aumenta sia la risoluzione, sia la luminosità del microscopio (fig. 7.5).
Interferenza
L’interferenza è l’effetto della sovrapposizione, nello spazio, delle onde elettromagnetiche che
costituiscono la luce. Quando, nello spazio, si sovrappongono due radiazioni elettromagnetiche che
abbiano in comune almeno una componente della polarizzazione (che non siano, quindi, polarizzate
linearmente con piani di polarizzazione ortogonali fra loro), le componenti parallele dei campi
elettrico e magnetico si sommano algebricamente tenendo conto delle rispettive ampiezze e fasi. Le
intensità della somma, che sono pari al quadrato delle ampiezze, possono variare da zero, nel caso
di ampiezze uguali e fasi in opposizione, a quattro volte l’intensità che avrebbe ciascuna delle due
radiazioni considerata separatamente, nel caso di ampiezze uguali e fasi uguali. Nello spazio, la luce
ambientale provoca continuamente un numero elevatissimo di interferenze; la assoluta casualità
delle ampiezze, delle fasi e dello stato di polarizzazione, e delle lunghezze d’onda delle radiazioni
che si sovrappongono, impedisce l’osservazione di qualsiasi manifestazione visibile. Se, però, le
radiazioni che si sovrappongono sono “coerenti” fra loro possono dare luogo ad “interferogrammi”,
cioè, a distribuzioni di intensità sotto forma di “frange di interferenza”. In figura 7.6 è illustrato
24
l’effetto della sovrapposizione di due fasci di radiazione coerenti fra loro, con piani di
polarizzazione coincidenti, con fronti d’onda piani (fasci collimati), di uguale ampiezza, che si
incrociano formando un piccolo angolo.
Figura 7.6 – Formazione delle frange di interferenza.
Per vedere le frange di interferenza è necessario interporre uno schermo diffondente: i fasci di luce,
dopo essersi incrociati ed aver dato luogo all’interferenza, non conservano nessuna traccia di quanto
avvenuto.
Diffusione
Nell'attraversare un mezzo la radiazione elettromagnetica interagisce con le molecole e con gli
atomi che costituiscono il mezzo stesso. Parte dei "fotoni" che costituiscono la radiazione stessa
possono essere assorbiti o diffusi dai costituenti il mezzo; questo fenomeno riduce l'intensità della
radiazione ma non altera l'energia associata a ciascun fotone: la lunghezza d'onda non viene alterata.
I fenomeni dell'assorbimento e della diffusione sono fenomeni statistici che non hanno nessuna
influenza sulla lunghezza d'onda della radiazione.
La diffusione della luce si presenta tutte le volte che un fascio di luce incontra un ostacolo. Un caso
particolare di diffusione può essere considerata la riflessione. In modo molto semplificato e
generale, si può dire che, quando l’ostacolo o la sua superficie presenta irregolarità di dimensioni
comparabili con la lunghezza d’onda della luce, si verifica il fenomeno della diffusione: la luce
viene “diffusa” entro un grande angolo; se le dimensioni dell’ostacolo o le irregolarità della sua
superficie sono grandi rispetto alla lunghezza d’onda, il fenomeno prevalente è la riflessione. In
pratica, quando un fascio di luce visibile colpisce una superficie come quella di un vetro
smerigliato, si verificano contemporaneamente i due fenomeni: le irregolarità di grandi dimensioni
riflettono la luce; le piccole irregolarità presenti sulle superfici di quelle grandi, diffondono la luce.
Il fenomeno della diffusione, come già detto sopra, può essere considerato una manifestazione della
“diffrazione”.
Le aberrazioni.
Ogni oggetto ed ogni immagine possono essere considerati insiemi di punti. Un sistema ottico è in
grado di formare l’immagine di un oggetto a condizione che da ciascun punto di questo parta un
flusso di energia, una parte della quale sia raccolta dal sistema ottico e convogliata nel
corrispondente punto immagine. La radiazione elettromagnetica (la luce) che emana da ciascun
punto dell’oggetto (sia che questo la emetta, sia che diffonda la luce che, da una sorgente esterna, lo
25
illumina), è costituita da una serie di fronti d’onda sferici (che uniscono tutti i punti di eguale fase),
con centro nel punto stesso, spaziati di una lunghezza d’onda (la lunghezza d’onda della
radiazione), cioè superfici di fase costante, che si mantengono sferiche finché si muovono in mezzi
isotropi. I fronti d’onda sono definibili anche come superfici normali ai raggi che partono da
ciascun punto oggetto. Quindi si può parlare, in modo equivalente, sia di raggi sia di fronti d’onda
(fig. 7.7).
Figura 7.7
Il sistema ottico ha il compito di raccogliere parte di questi fronti d’onda convessi (o raggi
divergenti), e trasformarli in fronti d’onda concavi (o raggi convergenti nel corrispondente punto
immagine) (fig. 7.8).
Figura 7.8
Si dimostra però che, tranne che in alcuni casi speciali, un fronte d’onda sferico nello spazio oggetto
(proveniente, cioè, da una sorgente puntiforme), non lo è mai nello spazio immagini (cioè dopo aver
attraversato il sistema ottico) e non converge quindi in un punto (2). Si consideri, ad esempio, il
caso di un sistema rifrattivo a superfici sferiche. Applicando le leggi di rifrazione è possibile
calcolare il percorso esatto di ciascun raggio dal punto oggetto, attraverso il sistema ottico, fino allo
spazio immagini. Se si ripete il calcolo (tracciamento di raggi) per un numero significativo di raggi,
si verifica subito che essi non convergono in un punto immagine. Le leggi della rifrazione e della
2
Welford - Aberrations of the Symmetrical Optical System.
Academic Press - Pag. 19.
26
riflessione legano, attraverso funzioni trigonometriche, i raggi che viaggiano prima, dopo e
all’interno dei sistemi ottici. Esprimendo le funzioni trigonometriche mediante la loro espansione in
serie (3), se ne trascurano tutti i termini tranne il primo (il termine lineare), e si calcola il percorso
dei raggi (tracciamento), con questo solo primo termine, si può ottenere un’immagine puntiforme,
cioè tutti i raggi convergono in un punto (dal punto di vista strettamente matematico - sistema
"ideale"). Man mano che nel calcolo si introducono gli altri termini della serie, i raggi nello spazio
immagini si discostano dalla loro direzione “ideale” dando luogo ad una immagine “aberrata”. In
altre parole si può dire che un sistema ottico "reale", con superfici sferiche, non è in grado di
trasformare un fronte d’onda sferico proveniente da un punto oggetto in un fronte d’onda sferico
nello spazio immagini. Il fronte d’onda trasmesso, però, può essere descritto come costituito da un
fronte sferico sommato ad un certo numero di contributi di deformazione. Questi contributi sono
chiamati aberrazioni.
Ogni sistema reale è quindi affetto da aberrazioni. Un sistema ideale, cioè privo di aberrazioni, non
esiste. Tuttavia le prestazioni di un qualsiasi sistema ottico, calcolate utilizzando solo il primo
termine dello sviluppo in serie delle funzioni trigonometriche che esprimono il trasferimento
geometrico del fronte d’onda o dei raggi ad esso perpendicolari, sono quelle di un sistema definito
“ideale”. Questa definizione trova larga utilizzazione nella progettazione ottica, in quanto, per
calcolare i contributi aberrazionali, si calcola la differenza fra l’andamento dei raggi o dei fronti
d’onda reali e quello dei raggi o dei fronti d’onda ideali. L’operazione considerata, di calcolare il
percorso dei raggi attraverso un sistema ottico, trascurando i termini dello sviluppo in serie delle
funzioni trigonometriche successivi al primo, equivale, dal punto di vista della fisica, a prendere in
considerazione solo quei raggi che formano, con le varie superfici del sistema ottico, angoli così
piccoli da poter confondere, ai fini applicativi (cioè, solo quando la differenza è trascurabile ai fini
dell’applicazione), il seno dell’angolo con l’angolo stesso. Questo può avvenire solo per raggi
incidenti sul sistema ottico entro un piccolo intorno dell’asse e per punti oggetto che sottendono un
angolo molto piccolo rispetto all’asse ottico stesso (i cui raggi sono, quindi, vicini all’asse ottico).
Si parla, in questo caso, di ottica “parassiale”. Matematicamente quanto detto equivale a considerare
lineari tutte le relazioni che definiscono il passaggio di un raggio attraverso il sistema ottico. E’
evidente allora che, dal punto di vista matematico, cade ogni limitazione circa l’utilizzazione della
zona “parassiale”: qualunque raggio, tracciato attraverso il sistema ottico mediante equazioni
lineari, indipendentemente dall’altezza d’incidenza e dal campo di vista, è “parassiale”. E’, quindi,
possibile tracciare, dallo stesso punto oggetto e con lo stesso angolo rispetto all’asse ottico, un
raggio parassiale ed un raggio reale - il cui percorso è calcolato, cioè, utilizzando le equazioni
complete e non solo la parte lineare di esse, e che descrive, quindi, il suo percorso reale attraverso il
sistema ottico: la differenza fra i due è una misura dell’aberrazione totale di quel raggio. E’, quindi,
uguale alla somma dei contributi di tutti i termini dello sviluppo in serie delle equazioni di
tracciamento (cioè di tutti i contributi aberrazionali).
E’ bene notare la distinzione fra aberrazioni e difetti di un sistema ottico. Le aberrazioni sono
differenze fra le direzioni calcolate dei raggi e quella ideale: sono una caratteristica del progetto di
un certo sistema ottico, indipendente dalla sua realizzazione. I difetti sono differenze fra la
direzione reale dei raggi e quella calcolata e sono dovuti ad errori di realizzazione di quel
particolare sistema ottico.
3
Welford - Aberrations of the Symmetrical Optical System.
Academic Press - Pag. 86.
27
8 Caratteristiche “gaussiane” di un sistema ottico.
Si è detto che tracciare i raggi attraverso un sistema ottico mediante equazioni lineari (parassiali)
significa non tenere conto delle aberrazioni del sistema: i raggi così calcolati si trasferiscono
attraverso il sistema ottico, senza subire l'effetto delle aberrazioni ed indicano, quindi, il
comportamento di base del sistema stesso; le aberrazioni provocheranno, poi, nella realtà,
scostamenti (normalmente piccoli) nelle direzioni effettive dei raggi rispetto alle direzioni calcolate
con le equazioni lineari. Non tenendo conto delle aberrazioni è possibile, quindi, verificare il
comportamento di base di uno o più componenti ottici attraversati dalla radiazione. Ci interessa ora
studiare, senza tenere conto delle aberrazioni, le relazioni geometriche che legano le posizioni
relative del sistema ottico, dell’oggetto e dell’immagine. Ci interessano quelle che si chiamano le
caratteristiche “gaussiane” del sistema ottico, cioè le caratteristiche di un sistema ottico che non
dipendono dalle aberrazioni.
Definiamo ora il minimo numero di parametri che individuano le caratteristiche gaussiane di un
sistema ottico ed alcune relazioni fondamentali; sui testi di ottica geometrica elementare se ne
possono trovare molte altre, non necessarie per il momento (4).
Piano focale: è la superficie piana perpendicolare all’asse ottico, passante per il punto dove
convergono i raggi parassiali relativi ad un punto oggetto assiale posto a distanza infinita dal
sistema ottico (fig. 8.1).
Figura 8.1 - Definizione di piano focale.
Piano principale: è la superficie piana perpendicolare all’asse ottico passante per i punti di incontro
del prolungamento dei raggi parassiali provenienti da un punto oggetto assiale all’infinito prima del
sistema ottico (spazio oggetto) e dopo di esso (spazio immagini) (fig. 8.2).
4
Welford - Aberrations of the Symmetrical Optical System.
Academic Press – Capitolo 3.
Welford - Geometrical Optics.
North-Holland publishing company - Capitolo 3.
F. A.. Jenkins, H. E. White – Fundamentals of Optics.
McGraw-Hill Book Company - Capitolo 4.
28
Figura 8.2 - Definizione di piano principale.
Esistono due piani principali: il piano principale anteriore ed il piano principale posteriore. I due
piani sono entrambi definiti dall’incontro dei raggi che precedono il sistema ottico con quelli che lo
seguono (dal loro prolungamento); la differenza è relativa alla direzione di propagazione della luce:
il piano principale anteriore è quello che si ottiene considerando la luce che si propaga da sinistra
verso destra; il piano principale posteriore è quello che si ottiene considerando la luce che si
propaga da destra verso sinistra.
Distanza focale: è la distanza fra piano principale e piano focale (fig. 8.3).
Figura 8.3 - Definizione di distanza focale.
Si noti che la distanza focale è indipendente dalla direzione di propagazione della luce: anche se i
piani principali anteriore e posteriore non coincidono, le distanze focali sono identiche; cambia solo
il "Back focus" (vedi paragrafo successivo).
Back focus: è la distanza fra il vertice dell'ultima superficie, dalla parte del piano focale, ed il piano
focale (fig. 8.4). Spesso, nei cataloghi di obiettivi commerciali si trovano le dizioni "flange
distance" o "tiraggio". Si tratta della distanza del piano focale da una flangia meccanica di
riferimento. Gli obiettivi fotografici per macchine reflex, ad esempio, devono fare in modo che il
piano focale coincida con la pellicola, qualunque sia l'obiettivo montato. Il comune attacco "C", ad
esempio, prevede una "flange distance” o “tiraggio" di 17.53 mm.
Figura 8.4 - Definizione di back focus.
Pupille di ingresso e di uscita. Il diametro massimo del fascio di raggi provenienti da un punto
oggetto e che attraversano il sistema ottico fino al punto immagine, è limitato da un diaframma
meccanico, che può essere costituito dal bordo di una lente o un componente opportunamente
inserito nel sistema. Se la limitazione (diaframma) si trova nello spazio oggetto (cioè fra oggetto e
lente), esso costituisce anche la pupilla di ingresso del sistema. Se il diaframma è interno al sistema
ottico, la pupilla di ingresso è costituita dall’immagine del diaframma fatta dagli elementi ottici che
lo precedono (verso l’oggetto). Per definizione di immagine (la pupilla di ingresso è l’immagine del
29
diaframma), tutti i raggi che passano attraverso la pupilla di ingresso e raggiungono il sistema
ottico, passano anche per il diaframma. Se poi si definisce, in modo analogo, come pupilla di uscita,
l’immagine del diaframma fatta da tutti i componenti ottici che lo seguono (verso l’immagine), gli
stessi raggi che hanno attraversato la pupilla di ingresso e sono entrati nel sistema ottico, passeranno
per quella di uscita; in questo modo, avendo definito nello spazio posizione e dimensioni delle
pupille di ingresso e di uscita e posizione e dimensioni del sistema ottico, si è definito l’insieme di
raggi che può attraversare il sistema. Si noti che l’immagine del diaframma, fatta dalle lenti che lo
precedono o che lo seguono, può essere reale, ma può anche essere virtuale, cioè, può essere situata
non dove i raggi si incontrano formando una immagine che si può raccogliere su uno schermo
(reale), ma dove si incontrano i prolungamenti dei raggi stessi (in questo caso l’immagine non si
può raccogliere su uno schermo). L’utilità della conoscenza delle pupille di ingresso e di uscita di
un sistema ottico è particolarmente evidente quando il diaframma è interno al sistema stesso: in
questo caso, infatti, il fatto che un raggio entri nel sistema ottico, non garantisce che passi anche
attraverso il diaframma. Viceversa, se il raggio entra nella pupilla di ingresso ed in un punto
qualsiasi della prima superficie del sistema ottico, sicuramente passa anche attraverso il diaframma.
Raggio principale. Il raggio che congiunge il punto oggetto con il centro della pupilla di ingresso,
passa, necessariamente, per il centro della pupilla di uscita (le due pupille sono una l’immagine
dell’altra perché sono entrambe l’immagine dello stesso diaframma: sono coniugate). Quindi
costituisce un asse di simmetria di ciascun insieme di raggi provenienti da un punto oggetto, che
attraversano il sistema ottico (fig. 8.5). Per questo motivo esso è chiamato raggio principale. É bene
notare che i raggi principali coincidono sul centro delle pupille di ingresso e di uscita e sul centro
del diaframma, ma non sono sovrapposti negli altri spazi.
Figura 8.5
Apertura: è l’angolo che formano, nello spazio immagini, due raggi provenienti da un punto oggetto
assiale all’infinito e passanti per punti diametralmente opposti agli estremi della pupilla di ingresso
(e, quindi, della pupilla di uscita) del sistema ottico. L’apertura si misura usualmente come rapporto
fra la distanza focale ed il diametro del fascio di luce incidente sul sistema (diametro della pupilla di
ingresso) (Fno oppure F#), oppure come prodotto del seno dell’angolo massimo che i raggi
provenienti da un punto oggetto assiale possono formare con l’asse ottico, moltiplicato per l’indice
di rifrazione del mezzo nel quale si trovano i raggi stessi. In quest’ultimo caso si parla di apertura
numerica (NA = sin α n).
Si deve notare che il modo di definire l’apertura, come Fno o come NA, dipende dalla particolare
applicazione: quando quello che interessa è la densità di energia sul rivelatore, poiché tutta l’energia
raccolta dal sistema, per ciascun punto-oggetto, è proporzionale all’area della pupilla di ingresso e,
quindi, al suo diametro, e poiché le dimensioni dell’immagine sul piano focale sono proporzionali
30
alla distanza focale, quanto più piccolo è l’Fno, tanto maggiore è la densità di energia con cui si
forma l’immagine del punto. Un caso tipico è quello della fotografia: a parità di Fno, qualunque
obiettivo produce la stessa densità di energia sulla pellicola fotografica; cambiano solo le
dimensioni dell’immagine in modo proporzionale alla distanza focale.
Quando quello che interessa è l’angolo massimo che i raggi in ingresso o in uscita dal sistema
formano con l’asse ottico, tenendo conto dell’indice di rifrazione del mezzo in cui si trovano
immersi, si utilizza, preferibilmente, l’NA. Casi tipici sono l’angolo massimo di accettazione o di
uscita dalle fibre ottiche e l’angolo massimo con cui i raggi provenienti da un punto-oggetto,
possono raggiungere un obiettivo da microscopio. Nel caso delle fibre ottiche, raggi con un angolo
maggiore, in ingresso, non potrebbero essere trasmessi; nel caso degli obiettivi da microscopio è
importante, ai fini della risoluzione ottenibile, che l’angolo accettato sia il maggiore possibile.
Relazione fra coniugati. Si chiamano coniugati due punti che sono reciprocamente oggetto ed
immagine. Tutte le distanze devono essere misurate dal piano principale (che, in alcuni casi, è
esterno al sistema ottico). Chiamando “p” la distanza dal piano principale del punto oggetto e “q”
quella del punto immagine, vale la relazione
(8.1) 1/p + 1/q = 1/f
dove f è la distanza focale (fig. 11).
Si vede subito che quando:
1) p = ∞ ∴ q = f ;
2) p = 2f ∴q = 2f;
3) p = f ∴q = ∞;
(la notazione ∴ indica che il secondo membro è conseguenza del primo)
In altre parole:
1) se il punto oggetto è all’infinito, la sua immagine è sul piano focale e viceversa (casi 1 e 3).
2) se il punto oggetto è distante due volte la distanza focale, anche il punto immagine è a due volte
la distanza focale. In questo caso l’immagine ha le stesse dimensioni dell’oggetto.
Quattro volte la distanza focale è la distanza minima fra oggetto ed immagine per una data distanza
focale. Se si grafica la funzione che lega p e q si ottiene una iperbole (fig. 8.6). Gli asintoti dei due
bracci dell’iperbole sono le distanze focali.
Figura 8.6 - Posizione reciproca di due punti coniugati.
Da questo tipo di andamento è facile comprendere il significato di due fenomeni ben noti: la bassa
profondità di fuoco dei microscopi e, corrispondentemente, quella grandissima degli obiettivi
fotografici di corta distanza focale. Nel primo caso, infatti, l’oggetto è situato a distanza di poco
31
superiore alla distanza focale: una piccola variazione di questa corrisponde ad un grande
spostamento della posizione dell'immagine. Nel secondo caso tutte le distanze comprese fra
l’infinito e circa 10 ÷ 20 distanze focali, non hanno coniugati sostanzialmente diversi. Grazie a
questa proprietà molti obiettivi fotografici di corta distanza focale (ad esempio i grandangolari)
sono privi di regolazione della distanza di messa a fuoco, perché tutti gli oggetti posti a distanze
relativamente brevi (alcuni metri) sono sempre "a fuoco".
Ingrandimento di un sistema ottico. L’ingrandimento è uguale al rapporto fra le distanze dei punti
dell’oggetto e dell’immagine coniugati, dal piano principale
M = q/p.
Dimensioni dell’immagine. Sul piano immagini, l’altezza di incidenza h (distanza dall’asse ottico)
di un raggio che, nello spazio oggetto, forma un angolo α con l’asse ottico, è data da
q tan α = h
dove q è la distanza fra il piano principale ed il piano immagini.
Se un oggetto sottende un angolo α rispetto all’asse ottico, la dimensione della sua immagine è h
(fig. 8.7).
Figura 8.7- Definizione di piani coniugati e di raggio principale.
9 Caratteristiche non-Gaussiane fondamentali
Sono state definite "caratteristiche Gaussiane" quelle proprietà di un sistema ottico che non
dipendono dalle aberrazioni.
Sono, viceversa, non-Gaussiane quelle caratteristiche che variano al variare delle aberrazioni. La
lista che segue ne elenca le principali.
Campo di vista. E' l'angolo entro il quale le prestazioni del sistema ottico, ai fini dell'applicazione,
sono considerate accettabili. Nei sistemi a simmetria assiale (la grande maggioranza) il campo di
vista è un angolo misurato rispetto all'asse ottico. Nei sistemi asimmetrici (ad esempio anamorfici)
il campo di vista è definito separatamente per i due assi x ed y.
Nel caso fotografico, ad esempio, il campo di vista totale deve permettere di coprire la diagonale del
formato della pellicola fotografica; in questo caso il campo di vista massimo è determinato
dall'angolo sotteso dalla diagonale del formato della pellicola fotografica, rispetto all'intersezione
dell'asse ottico con il piano principale. Naturalmente lo stesso ragionamento si applica qualunque
sia l’utilizzazione dell’immagine: il campo di vista deve essere sufficiente per coprire la dimensione
massima dell’immagine.
Campo spettrale di funzionamento. E' l'intervallo spettrale entro il quale il sistema può funzionare
correttamente. La principale limitazione al campo spettrale di funzionamento è imposta dalla
trasparenza dei materiali con i quali è realizzato il sistema ottico. Ad esempio, la grande
maggioranza dei vetri per ottica e trasparente nell'intervallo spettrale compreso fra le lunghezze
32
d'onda di 0.4 µm e di 2.5 µm. Non è, comunque, generalmente richiesto il funzionamento entro un
intervallo spettrale così esteso. Nella maggior parte delle applicazioni l'intervallo spettrale utile è
quello visibile, compreso fra circa 0.45 e 0.65 µm. Anche se la trasparenza del sistema ottico si
estende al di fuori di questo intervallo i contributi aberrazionali cromatici rendono inutilizzabile la
parte di spettro esterna all’intervallo 0.45÷0.65 µm. Negli strumenti ottici, come, ad esempio, nelle
macchine fotografiche, il campo spettrale di funzionamento è, in genere, limitato dalla sensibilità
spettrale del rivelatore (la pellicola fotografica nel caso della macchina fotografica).
Risoluzione in funzione del campo di vista. La risoluzione è definita come il numero di particolari
(normalmente coppie di linee parallele equidistanti) che il sistema ottico è in grado di trasferire
dall'oggetto all'immagine, mantenendo entro limiti accettabili (ai fini dell'applicazione), gli errori di
forma e la perdita di contrasto. La risoluzione è limitata da quattro fattori: la diffrazione, le
aberrazioni, la defocalizzazione ed i difetti costruttivi. Tutti i fattori variano al variare del campo di
vista (distanza angolare dall'asse ottico). Spesso la risoluzione di uno strumento ottico è limitata dal
rivelatore. Un caso tipico è quello dei CCD: si tratta di array bidimensionali di rivelatori nei quali il
limite di risoluzione è imposto dalle dimensioni e dal numero di "pixel" che li costituiscono. In
questi casi si deve tenere conto anche di altri fenomeni, per i quali si deve applicare il criterio di
Nyquist, del quale si parlerà in seguito.
Apertura del sistema ottico. L'apertura del sistema ottico determina la quantità di energia che il
sistema è in grado di raccogliere dall'oggetto e convogliare in ciascun punto dell'immagine. Al
crescere dell'apertura (intesa come rapporto fra la distanza dal piano principale alla quale si forma
l'immagine ed il diametro della pupilla di ingresso - Fno) crescono, di norma, le aberrazioni. Il
deterioramento delle prestazioni che ne consegue impone un limite alla massima apertura ottenibile.
Esiste anche un limite fisico, al quale difficilmente ci si avvicina nei sistemi ottici reali. La minima
distanzaYfra le immagini di due punti adiacenti risolvibile è data, nel caso di illuminazione non
coerente, da (5):
λ 0 = 0.61 λ 0 ;
nsinθ
NA
nel caso di illuminazione coerente, da:
(9.1) Y ≈ 0.61
(9.2) Y ≈ 0.77
λ
0
nsinθ
= 0.77 λ 0 .
NA
Ingrandimento. L'ingrandimento è stato menzionato anche fra le caratteristiche gaussiane di un
sistema ottico; infatti, l'ingrandimento di un sistema ottico dipende solo da queste, ma il valore
dell'ingrandimento che effettivamente può essere utilizzato (variando la distanza dell'oggetto) è
limitato dalle aberrazioni. Per ingrandimento si deve intendere il fattore per il quale deve essere
moltiplicata ogni dimensione trasversale, rispetto all'asse ottico, per ottenere la dimensione
dell'immagine; quindi l'ingrandimento può essere anche minore di uno.
Sistemi focali e afocali
E' stata data la definizione di distanza focale di un sistema ottico come la distanza dal piano
principale alla quale convergono tutti i raggi parassiali che incidono sul sistema ottico in una
direzione parallela all'asse ottico. Un sistema ottico dotato di una propria distanza focale, si chiama
sistema "focale". Se, però, in un sistema ottico, un fascio (parassiale) di radiazione che incide su di
esso parallelamente all'asse ottico, non converge in un punto del piano focale, ma emerge dal
sistema in una direzione parallela a quella di ingresso, il sistema è privo di focale, ed è, quindi,
chiamato "afocale"
5
M. Born, E. Wolf - Principles of Optics – 3rd Edition – pag. 418.
33
10 Sorgenti di radiazioni elettromagnetiche di interesse nei sistemi ottici o elettroottici
Le sorgenti di luce sono di interesse nei sistemi ottici ed elettroottici perché la funzione di questi
ultimi è di raccoglierne le radiazioni e modificarne qualche caratteristica, per il raggiungimento
degli scopi per i quali sono stati progettati.
Le sorgenti di luce di interesse per l’ottica comprendono non solo quelle che emettono “luce” in
senso stretto, cioè la radiazione “visibile”, ma anche tutte quelle che emettono radiazioni a
lunghezze d’onda per le quali sono utilizzabili i sistemi ottici. Lo spettro delle lunghezze d’onda
normalmente utilizzate con i sistemi ottici vanno dai raggi X (0.1 nm) al medio infrarosso (30 µm).
Le caratteristiche delle sorgenti che hanno maggiore interesse dal punto di vista dell’ottica sono:
• Lo spettro delle radiazioni emesse;
• la “radianza” (L), espressa, in unità radiometriche, in W m-2 sr-1, oppure, in unità
fotometriche (riferite, cioè, a quello che vede l’occhio) la “luminanza” (nella vecchia
terminologia “brillanza”) espressa in lumen sr-1 cm-2;
• la distribuzione di densità di radianza (o di luminanza) sulla superficie della sorgente (φ emittanza in w cm2);
• l’intensità “ I ” (watt/sr), che è la potenza divisa per l’angolo solido di emissione. L’angolo,
in steradianti, deve essere quello effettivamente raccolto, se quest’ultimo è minore di quello
emesso.
• le dimensioni e la forma della parte che emette la radiazione;
• la distribuzione angolare della radiazione emessa.
Le sorgenti più comunemente utilizzate sono:
• le lampade ad incandescenza;
• le lampade a scarica in gas;
• i vari tipi di laser;
• i LED;
• i corpi neri (nell’infrarosso).
Le lampade ad incandescenza sono costituite da un filamento resistivo immerso in un gas (inerte),
riscaldato per effetto Joule al passaggio della corrente che le alimenta (6).
La massima temperatura che può raggiungere il filamento è limitata dal rischio che il filamento
stesso sublimi, interrompendo la continuità elettrica e depositando il vapore del metallo sulle pareti
interne dell’involucro trasparente che contiene il gas ed il filamento, attenuando o annullando la sua
trasparenza. Le lampade “alogene” sono lampade ad incandescenza nelle quali il gas in cui è
immerso il filamento è in grado di combinarsi con il tungsteno del filamento evaporato e di
ridepositarlo sul filamento stesso. In questo modo la temperatura raggiunta può essere maggiore
senza che il filamento sublimi. L’involucro che contiene il gas è più piccolo di quello delle normali
lampade ad incandescenza e, di conseguenza, più vicino al filamento; la temperatura raggiunta
dall’involucro è molto alta; per evitare rotture, l’involucro è realizzato in quarzo; questo porta,
anche, ad una maggiore trasparenza nella zona dell’ultravioletto. Le lampade ad incandescenza
emettono la radiazione in tutte le direzioni. La densità di radianza è, normalmente, uniforme,
almeno nelle zone lontane dai terminali elettrici. Naturalmente la radianza è uniforme lungo il
“filamento”; gli spazi compresi fra le spire del filamento hanno radianza nulla. Nelle lampade a
scarica in gas, un arco fra due elettrodi eccita il gas che riempie un bulbo trasparente. A seconda del
tipo e della pressione del gas, varia in modo significativo lo spettro e la radianza delle sorgenti. La
6
V., ad esempio: The Infrared & Electro-optical Systems Handbook – Vol. 1 – Sources of radiation
– G. J. Zissis, Editor – SPIE PRESS – pag. 73
34
radiazione viene emessa in tutte le direzioni (7). Anche la densità di radianza varia fortemente con il
tipo di lampada. La figura 10.1, mostra il tipico andamento della densità di radianza nel caso di una
lampada ad arco ad alta pressione.
Figura 10.1 – Distribuzione di intensità di una sorgente ad arco ad alta pressione 8.
I LASER sono sorgenti la cui caratteristiche principali, dal punto di vista dei sistemi ottici o
elettroottici, sono l’elevatissima radianza, la monocromaticità della radiazione emessa (quindi, la
lunghezza di coerenza della radiazione), la sua forte direzionalità, l’elevata densità di energia che è
possibile ottenere (su piccole superfici) mediante la focalizzazione della radiazione, la grande
collimazione del fascio di radiazione emessa in molti tipi di laser e le elevatissime potenze che si
possono ottenere, grazie alla brevissima durata degli impulsi nei quali è possibile concentrare tutta
l’energia.
Esistono molti tipi di laser, con caratteristiche molto diverse fra loro (lunghezza d’onda, larghezza
di banda e, quindi, lunghezza di coerenza, energia media ed energia per impulso, regime temporale:
CW (Continous-Wave in continua) o ad impulsi, dimensioni e forma del fascio emesso,
distribuzione di intensità, divergenza, a stato solido, liquidi, a gas, ecc.). Una differenza sostanziale,
dal punto di vista dell’ottica, è la distribuzione nello spazio dell’energia emessa. Mentre, ad
esempio, alcuni laser a gas possono emettere radiazione con divergenza massima dell’ordine di 0.5
mrad, la maggior parte dei laser a diodo emettono un fascio fortemente asimmetrico e di grande
angolo. Infatti nei laser a diodo la radiazione viene emessa attraverso una sottile fessura la cui
larghezza può essere di pochi µm e la lunghezza di centinaia di µm. Questo fa sì che, su un asse
perpendicolare alla fenditura, la diffrazione dia luogo ad una forte divergenza (decine di gradi),
mentre su un asse parallelo alla fenditura la divergenza può scendere a pochi mrad. Questo
fenomeno ha, come ulteriore conseguenza, l’emissione di fasci astigmatici, nei quali, cioè, mentre
7
V., ad esempio: The Infrared & Electro-optical Systems Handbook – Vol. 1 – Sources of radiation
– G. J. Zissis, Editor – SPIE PRESS – pag. 80.
3 The Infrared & Electro-optical Systems Handbook – Vol. 1 – Sources of radiation
– G. J. Zissis, Editor – SPIE PRESS – pag. 89.
35
nei raggi che giacciono su piani perpendicolari alla fenditura il punto comune da cui
apparentemente nascono si trova molto vicino alla superficie di emissione, i raggi che giacciono su
piani paralleli alla fenditura hanno il punto comune molto più interno. Se si fa un’immagine della
sorgente, si formano due immagini separate, distanziate longitudinalmente: quando una è a fuoco, la
seconda è fuori fuoco. Molti laser a diodo commerciali sono forniti di opportuni sistemi ottici che
riducono la divergenza del fascio emesso, spesso ne correggono la forma (da ellittica a circolare) e,
talvolta, ne correggono l’astigmatismo. Una caratteristica dei laser, importante specialmente ai fini
della sicurezza per gli occhi, è che la sorgente è sempre riconducibile ad un punto di piccole
dimensioni: ogni volta che la radiazione viene focalizzata, la densità di energia può raggiungere
valori elevatissimi.
I LED sono diodi analoghi ai laser a diodo, ma emettono la radiazione da superfici maggiori, con
bande spettrali molto più larghe (brevi lunghezze di coerenza) e con divergenze molto maggiori.
I corpi neri sono sorgenti che cercano, per quanto possibile, di realizzare le condizioni di emissione
che rispettino le condizioni imposte dalle leggi di Plank: la distribuzione spettrale della radiazione
emessa dipende, in modo noto, dalla temperatura di una superficie portata alla temperatura voluta.
Sono sorgenti di particolare interesse nell’infrarosso perché, alle temperature che possono
raggiungere senza danneggiarsi (al massimo a temperature di poco superiori a 1000°C), la parte di
spettro che emettono si trova nell’infrarosso.
Non entreremo in maggiori dettagli sulle caratteristiche delle sorgenti, sia per la vastità
dell’argomento, che perché esiste, su di esse, una vastissima letteratura. In una appendice dedicata
ai laser, prenderemo in considerazione alcuni fenomeni ottici che possono influenzare in modo
determinante il comportamento dei sistemi ottici o elettroottici.
Le sorgenti più comuni, le lampade ad incandescenza, si comportano, dal punto di vista spettrale, in
modo molto simile a corpi neri ad alta temperatura. Grazie all’alta temperatura del filamento,
possono emettere grandi quantità di energia nello spettro visibile; lo spettro, tuttavia, non è molto
simile a quello solare, perché le temperature necessarie (di circa 6000 °K) non sono raggiungibili; le
emissioni nell’ultravioletto (comunque scarse) e nell’infrarosso sono, di solito, assorbite
dall’involucro di vetro, il cui spettro di trasparenza normalmente comprende le lunghezze d’onda
fra 0.4 e 2.5 µm. Si deve notare che le radiazioni assorbite dal vetro, specialmente nell’infrarosso, lo
fanno riscaldare; trattandosi un materiale fortemente assorbente nell’infrarosso, la sua emissività
negli stessi intervalli spettrali (cioè l’efficienza con cui possono ri-emettere sotto forma di
radiazioni infrarosse, l’energia assorbita) è molto elevata. Di conseguenza, se si osserva una
lampadina accesa con un sistema ottico dotato di un rivelatore adatto per la osservazione delle
immagini di oggetti nelle bande spettrali dell’infrarosso al di sopra di 2.5 µm (ad esempio con una
camera termica), non si vede solo il filamento, ma anche l’involucro di vetro.
Lo spettro visibile, emesso dalle lampade ad incandescenza è continuo (cioè, a differenza
dell’emissione di molte lampade con scarica elettrica in gas, non è a “righe”). La radiazione emessa
non è polarizzata. Di queste caratteristiche si deve tenere conto in fase di progettazione ottica,
perché lo spettro emesso è molto più largo e con una distribuzione molto diversa dalla curva
“fotopica”, che descrive la sensibilità spettrale dell’occhio umano. Se il sistema ottico è destinato
alla formazione di immagini che riproducano quanto osservato con gli occhi, se ne deve tenere
conto, sia perché se il rivelatore utilizzato non è l’occhio umano e potrebbe avere uno spettro di
sensibilità più esteso e registrare segnali che l’occhio non può vedere, sia perché il sistema ottico,
pur essendo cromaticamente corretto, di solito non lo è in zone spettrali esterne allo spettro visibile.
La conseguenza potrebbe essere che il rivelatore viene investito da un segnale fuori fuoco, che può
degradare in modo significativo l’immagine raccolta.
Le lampade a scarica in gas (ad esempio ad arco) emettono una radiazione il cui contenuto spettrale
dipende dal gas, dalla temperatura di funzionamento e dalla zona osservata. Le così dette “lampade
spettrali” contengono gas puri a bassa pressione. In seguito all’eccitazione, lo spettro emesso è
formato, prevalentemente, da righe spettrali tipiche del gas. Quando la temperatura del gas cresce,
le righe si allargano. Nelle lampade “ad arco” il gas di solito è ad alta pressione. Lo spettro di
36
emissione, che contiene ancora i massimi tipici del gas o della miscela di gas, è spesso contaminato
dallo spettro continuo dovuto agli elettrodi (metallici) che possono raggiungere temperature molto
elevate.
La radiazione emessa dalle sorgenti laser è particolarmente ricca dal punto di vista dei fenomeni
ottici cui può dare luogo; la maggior parte di essi è una diretta conseguenza della grande lunghezza
di coerenza (banda spettrale stretta) di cui sono dotate molte sorgenti laser. Una grande lunghezza di
coerenza significa che, se la radiazione laser, per effetto, ad esempio, della diffusione prodotta da
un oggetto che illumina, raggiunge lo stesso punto dopo aver percorso cammini ottici diversi, può
interferire (purché la differenza di cammino ottico sia minore della lunghezza di coerenza).
L’interferenza si traduce in vistose variazioni di intensità del segnale, che possono verificarsi a
distanze fra punti più o meno grandi (un esempio tipico sono le frange di interferenza prodotte dagli
interferometri). Uno degli effetti più vistosi dell’interferenza è il fenomeno degli “speckles”.
Quando si osserva una superficie diffondente illuminata da una radiazione dotata di grande
lunghezza di coerenza, la superficie appare coperta da molti puntini luminosi, intervallati da zone
nere: è il fenomeno degli speckles. Se la zona illuminata della superficie non è liscia, ma è costituita
da rilievi irregolari grandi rispetto alla lunghezza d’onda della radiazione che la illumina, da ciascun
punto delle irregolarità si diffonde parte della radiazione, con una fase diversa da un punto all’altro.
Se un sistema ottico raccoglie la radiazione per formare un’immagine della zona illuminata, nel
caso ideale, di un sistema ottico con risoluzione infinita, di ciascun punto fa un’immagine
indipendente. Nella realtà, però, un sistema ottico di risoluzione infinita non esiste, sia per effetto
della diffrazione, che delle aberrazioni, dei difetti di costruzione e degli errori di messa a fuoco. Se
la zona della superficie che contribuisce alla minima dimensione risolta nell’immagine, è costituita
da almeno due punti da cui parte la radiazione diffusa, con una differenza di distanza dall’ottica
superiore alla lunghezza d’onda, quando i due contributi della radiazione diffusa vengono fatti
convergere nel punto-immagine risolto, interferiscono, dando luogo ad una intensità che dipende
dalla fase e dall’ampiezza relativa: se sono in fase, le ampiezze si sommano (se le ampiezze sono
uguali, l’intensità del punto luminoso diviene quattro volte l’intensità che avrebbe ciascuno dei
punti separatamente); se sono in opposizione di fase, si sottraggono reciprocamente; in tutte le
condizioni di fase o di ampiezze intermedie, danno luogo ad immagini di intensità intermedia.
Quindi, all’interno di una zona risolta dell’immagine fatta dal sistema ottico, esiste una parte della
radiazione che si somma in fase, una parte in opposizione di fase ed il resto in condizioni
intermedie. Le dimensioni di ciascuno “speckle” dipendono dalla risoluzione del sistema ottico.
Come già detto gli speckle sono causati da una costruttiva e distruttiva interferenza dai ritorni degli
elementi scatteranti all’interno di una cella di risoluzione (fig. 10.2)
E
β
GR
V4,φ4
V5,φ5
V2,φ2
V3,φ3
V1,φ1
V6,φ6
37
Figura 10.2
Il numero degli speckle Ns in un sistema ottico è pari a:
(10.1)
Ns =
area illu min ata dal Tx
Divergenza Tx
=
area diffrazione del Rx FOV di diffrazione Rx
2
38La seconda parte della formula assume che la distanza dalla superficie scatterante sia la stessa per
Tx e Rx. Sarebbe quindi più corretto parlare di area illuminata oppure moltiplicare la divergenza e
la diffrazione per la distanza.
Per ridurre il numero degli speckle è necessario che l’ ottica del Tx sia simile a quella del Rx o più
precisamente l’area illuminata dal Tx deve essere simile a quella vista dalla diffrazione dell’Rx.
Tipici valori di divergenza di un laser singolo modo di 1 cm di diametro intorno ai 100 µrad.
L’angolo di diffrazione di un ottica da 1 m di diametro è pari a circa 1 µrad.
Per ottenere 3-4 speckle andrebbe ingrandito il fascio laser (mediante dei beam expander) alcune
decine di volte e ciò è molto difficile. 38Questo è vero solo a parità di distanza dalla superficie
scatterante fra Tx ed Rx.
11 LASER
I laser sono costituiti da un materiale attivo, da un sistema di eccitazione del materiale, e da un
sistema di specchi che riflettono la radiazione emessa dal materiale attivo. Il materiale attivo
contiene atomi o molecole che, eccitate da una radiazione luminosa o da un campo elettrico o da
una reazione chimica, accumulano l’energia assorbita per tempi relativamente lunghi senza
riemetterla subito. Una parte del materiale attivo riemette l’energia accumulata sotto forma di
radiazioni elettromagnetiche. Queste radiazioni, nell’investire altre parti del materiale attivo, ancora
eccitate, ne provocano la diseccitazione, con l’emissione della radiazione nella stessa direzione e
con la stessa fase della radiazione incidente, con un effetto a valanga. Se il materiale attivo è
racchiuso fra due specchi, la radiazione emessa transita molte volte nel materiale stesso,
favorendone la diseccitazione. Uno degli specchi può trasmettere una piccola percentuale (1-2%)
della radiazione che lo investe; dopo un breve periodo molta o tutta l’energia accumulata forma un
impulso gigante, che può, in parte, emergere dallo specchio parzialmente riflettente (fig. 11.1).
38
Figura 11.1
Se i due specchi sono piani e paralleli fra loro, il fascio emesso è ben collimato. Se gli specchi sono
curvi, la radiazione emerge divergente, come se provenisse da un piccolo punto situato nei pressi di
uno degli specchi.
Se, all’interno dello spazio fra i due specchi, un interruttore ottico impedisce alla radiazione di
transitare più volte nel materiale attivo, l’energia non viene emessa, ma seguita ad accumularsi,
finché dura l’eccitazione; quando l’interruttore si apre (Q-switch) tutta l’energia accumulata viene
emessa in tempi molto brevi.
Mediante opportuni interventi di carattere ottico, si possono ottenere treni di impulsi di durata
dell’ordine dei picosecondi (10-12 sec.) o femtosecondi (10-15 sec).
Facendo passare la radiazione attraverso opportuni cristalli, si possono generare le armoniche
superiori. Ad esempio, un laser a Nd.YAG emette radiazione alla lunghezza d’onda di 1.064 µm
(infrarosso vicino). La seconda armonica ha una lunghezza d’onda di 0.532 µm (verde), la terza
armonica 0.355 µm (ultravioletto vicino) e la quarta armonica 0.266 µm (ultravioletto lontano).
I laser sono sorgenti di radiazione, con caratteristiche molto diverse dalle comuni sorgenti (lampade
ad incandescenza, lampade ad arco, corpi neri, sole, ecc.). Le principali caratteristiche dei fasci laser
sono:
• la grande monocromaticità, che ha, per conseguenza, la possibilità di provocare facilmente
fenomeni di interferenza;
• la grandissima densità di energia che possono trasportare; le quantità di energia sono,
solitamente, piccole;
• la bassissima divergenza, che ne permette la focalizzazione su immagini di piccolissime
dimensioni, e, quindi, di elevatissime densità di energia; un fascio con 1 milliradiante di
divergenza totale, focalizzato con una lente da 17 mm di distanza focale (la distanza focale
dell’occhio umano), viene concentrato in un dischetto di 17 micron di diametro;
• l’enorme potenza che possono raggiungere, grazie alla brevissima durata degli impulsi che
possono produrre. Basta pensare che un fascio che trasporta una energia di 1 millesimo di
Joule, in un impulso di 1 nanosecondo (10-9 secondi), ha una potenza di 1 Megawatt (1
milione di watt).
Alcuni tipi di fasci laser non sono visibili.
La pericolosità di una radiazione luminosa è legata, principalmente, alla possibilità che una grande
quantità di energia penetri nell’occhio attraverso il diametro del diaframma, e venga focalizzata in
un punto di piccole dimensioni, e, quindi, di grande densità di energia. Da questo punto di vista
39
sono pericolose tutte le sorgenti che presentino la capacità di emettere molta radiazione da piccole
superfici. Un esempio è il sole, ma anche gli archi elettrici utilizzati per le saldature, oppure alcuni
tipi di LED. Tutti i laser emettono la radiazione da piccole superfici o, in modo equivalente,
possono essere focalizzati su piccole superfici. La maggior parte delle lampadine emette la
radiazione da superfici relativamente grandi.
Quando l’occhio è investito da una intensa radiazione nel visibile, anche se con un certo ritardo,
chiude il diaframma o abbassa la palpebra per proteggersi. Se, però, non vede la radiazione (ad
esempio, nel vicino infrarosso), non chiude il diaframma, e la pericolosità della radiazione aumenta.
Alcuni laser emettono nel vicino infrarosso. Nei laser impulsati, gli impulsi sono di durata così
breve, da non consentire, anche nel visibile, interventi da parte del diaframma o della palpebra.
I laser non devono mai essere utilizzati, se non per sfruttare le loro peculiari caratteristiche, perché
sono estremamente pericolosi per gli occhi (ed, in certi casi, per la pelle umana). I laser non sono
lampadine.
A volte i laser vengono utilizzati per gli allineamenti, sfruttando la loro collimazione e la loro
grande visibilità: questa pratica è estremamente pericolosa; è preferibile fare uso di autocollimatori
(che, usati in modo corretto, possono godere di sensibilità molto elevate).
Quando un fascio laser colpisce una superficie diffondente (ad esempio un muro) l’energia raccolta
dalla pupilla dell’occhio, può essere sufficiente per distruggere una zona della retina che la riceve.
Si tratta di danni irreversibili che, sommandosi nel tempo, possono divenire molto estesi. Il danno
può essere molto più grave (può portare alla cecità) nel caso di fasci riflessi (e non diffusi).
La quantità di energia con la quale si forma l’immagine è proporzionale all’area della pupilla
dell’occhio. E’ conveniente, quindi, che l’ambiente nel quale opera un laser sia fortemente
illuminato, per mantenere piccolo il diametro della pupilla.
L’occhio umano è trasparente per alcune lunghezze d’onda emesse dai laser, comprese alcune che
può assorbire ma che non può vedere. Il caso tipico è quello dei laser a Neodimio, la cui lunghezza
d’onda di emissione è 1,064 micron, non visibile. L’occhio investito da questa radiazione non la
vede, ma ne può essere danneggiato.
I fasci laser nell’ultravioletto (prodotti, ad esempio, dai laser ad eccimeri), non possono raggiungere
la retina, perché sono assorbiti dal cristallino. Possono, però, danneggiare le congiuntive. I fasci dei
laser ad anidride carbonica (CO2) sono a 10,6 micron: non sono visibili e non penetrano
nell’occhio, ma la loro energia può essere tale da danneggiare la pelle.
Tutti i laser, secondo la normativa europea EN 60825-1, devono essere dotati di una targhetta che
ne indica la “classe”. La classe di un laser ne indica la pericolosità nel caso peggiore: alcuni laser,
pur facendo parte di una classe molto pericolosa, possono non essere pericolosi, se vengono
rispettate tutte le precauzioni necessarie. La prima precauzione consiste nel dotare coloro che si
trovano in presenza della radiazione di occhiali adatti. Si deve notare, tuttavia, che anche con l’uso
degli occhiali protettivi, un fascio laser non deve mai essere guardato direttamente. Si deve poi, per
quanto possibile, impedire che la radiazione possa diffondersi nell’ambiente. Molte altre protezioni
sono prescritte o consigliate dalla normativa in vigore. Le istruzioni fornite con lo strumento dal
produttore, devono essere seguite scrupolosamente.
Particolarmente pericolosi sono i riflessi dei fasci da parte di superfici lucide (non solo degli
specchi, ma anche di semplici finestre o lenti o superfici metalliche lucide). I riflessi possono essere
molto pericolosi anche per i laser stessi. Un fascio laser, riflesso sul laser stesso, può provocarne
l’instabilità, ma può anche provocarne la distruzione. E’ sempre consigliabile montare con un
piccolo angolo le finestre, evitando che il riflesso della superficie rientri nel laser.
Dell’elevata densità di energia si deve tenere conto quando un fascio laser attraversa un sistema
ottico, o viene riflesso da uno specchio. Se la soglia di danneggiamento del sistema ottico o dello
specchio non è sufficientemente alta, si possono provocare danni superficiali o, in alcuni casi,
rotture.
Quando la radiazione laser colpisce la retina, uno degli effetti, proporzionale alla durata
dell’irraggiamento, e, quindi, all’energia totale, è di tipo termico. Se la radiazione è impulsata per
40
tempi brevi, poiché la potenza può essere elevata ed il campo elettrico è proporzionale alla potenza,
si possono verificare fenomeni di ionizzazione; per impulsi molto brevi, anche se l’energia è bassa,
i danni possono essere gravi.
La larghezza di banda dei fasci laser, cioè il loro contenuto spettrale, dipende anche dalla durata
degli impulsi: impulsi estremamente brevi possono dar luogo a fasci di luce bianca o di spettro
esteso.
Tutti i fenomeni di interferenza (compresi gli speckles) sono legati alla larghezza di banda: fasci
laser molto monocromatici (come, ad esempio, alcuni tipi di laser HeNe) producono più facilmente
interferenze dei fasci prodotti da altri laser (ad esempio Nd-YAG impulsati oppure diodi laser).
Quando si osserva una superficie diffondente illuminata da un laser, la zona illuminata è coperta da
numerosi punti luminosi: è il fenomeno degli “speckles” sopra menzionato. Ciascun punto della
superficie riflette, verso l’occhio, parte della radiazione che riceve, con una fase che dipende
dall’altezza del punto: punti adiacenti, di altezze diverse, riflettono la radiazione con fasi diverse. Se
l’occhio, per varie ragioni, non distingue i due punti e somma le radiazioni, quello che vede è un
effetto della somma delle ampiezze che ciascuna di esse presenta per effetto della differenza di fase:
l’intensità vista è il quadrato della somma delle ampiezze. Se le fasi sono uguali, l’intensità può
essere elevata; se le fasi sono in opposizione, l’intensità può essere nulla; quando le differenze di
fase sono intermedie, l’intensità risultante è intermedia. Perché questo fenomeno si verifichi, la
radiazione deve essere coerente, cioè la banda spettrale deve essere stretta.
Particolari precauzioni si devono adottare se la radiazione laser deve attraversare filtri
interferenziali o essere raccolta da rivelatori dotati di finestre di protezione (per le possibili
riflessioni, molto pericolose per l’occhio umano).
12 Sensori
Si fa dell'imaging, ogni volta che si forma un'immagine su un rivelatore in grado di raccogliere i
dettagli dell'immagine, in modo che possa essere visualizzata o analizzata con metodi ottici o
elettronici. La forma più comune di imaging è la fotografia. L'imaging non si riferisce solamente
alle immagini di oggetti ma anche ad immagini contenenti informazioni generate da strumenti di
varia natura: sono esempi di imaging le immagini raccolte all'uscita di uno spettrografo o di un
monocromatore, di un interferometro ecc..
I fenomeni che possono influenzare la formazione e la memorizzazione di un'immagine sono
molteplici. Fra i fenomeni attribuibili al sistema ottico rientrano, ad esempio, le aberrazioni, le
vibrazioni, i difetti dell'ottica, i riflessi delle superfici, ecc. Tutti questi fenomeni sono trattati nello
studio dell’ottica.
Alcuni fenomeni che influenzano l'imaging sono attribuibili o all'ambiente esterno al sistema ottico
o al rivelatore.
Fra i fenomeni attribuibili all'ambiente esterno si possono citare le turbolenze atmosferiche, che
alterano la direzione dei raggi relativi ad oggetti lontani, quando questi raggi devono attraversare
l'atmosfera. Un caso tipico è quello del "seeing", cioè delle fluttuazioni atmosferiche che
impediscono la formazione ad alta risoluzione delle immagini delle stelle. Infatti le turbolenze
atmosferiche alterano casualmente la direzione dei raggi che attraversano l'atmosfera di quantità
variabili, ma che sono, al minimo, di alcuni microradianti. Anche lo scintillio delle stelle è
provocato dalle turbolenze atmosferiche. Altri fenomeni atmosferici sono legati ai gradienti di
temperatura che possono verificarsi in particolari condizioni: è ben noto il fenomeno per il quale la
superficie di una strada asfaltata, fortemente riscaldata dal sole, appare riflettente quando la si
osserva sotto un angolo molto grande rispetto alla normale alla superficie (come quando si è alla
guida di un autoveicolo). Quello che si vede, in queste condizioni, è, spesso, il cielo. Questo
fenomeno è dovuto alla forte riduzione dell'indice di rifrazione dell'aria in prossimità dell'asfalto
molto caldo: i raggi di luce provenienti dal cielo e che sono diretti verso l'asfalto, vengono deviati
per effetto del gradiente di indice di rifrazione dell'atmosfera (in modo analogo a quanto avviene
41
nelle fibre ottiche a gradiente di indice di rifrazione o nelle lenti GRIN) e sembrano provenire
dall'asfalto. Fenomeni simili sono i miraggi dei quali un esempio è la Fata Morgana. L'effetto di
questo tipo di miraggio è quello di distorcere l'immagine di superfici relativamente pianeggianti
(come, ad esempio, le distese di neve) e far apparire le piccole irregolarità della superficie come
montagne o castelli.
Fra i fenomeni attribuibili ai rivelatori sono di particolare importanza quelli legati alla suddivisione
delle immagini in "pixel". Questo si verifica tutte le volte (e sono la maggior parte) in cui
l'immagine viene raccolta da un rivelatore costituito da un array lineare o bidimensionale di sensori
indipendenti. Gli array lineari vengono spesso utilizzati nelle camere termiche per la visione
nell'infrarosso e raccolgono l'immagine mediante una scansione che fa scorrere sulla loro superficie
l'immagine. Gli array bidimensionali non hanno bisogno di scansioni (sono del tipo "staring", che,
cioè, vedono contemporaneamente tutti i punti dell'immagine). Di questo tipo sono i comuni CCD,
usati nelle telecamere e nelle moderne macchine fotografiche digitali.
Quando si fa l'immagine, ad esempio, di una riga rettilinea, orientata in modo pressoché parallelo
agli array di pixel che costituiscono l'array bidimensionale, la riga può essere interamente contenuta
entro una singola riga o colonna. In questo caso l'immagine ricostruita della riga non può che avere
la larghezza minima dei pixel che l'hanno raccolta. Se, però, l'immagine della riga si trova a cavallo
fra due righe o colonne parallele di pixel, l'immagine ricostruita è larga quanto le due righe o
colonne, ma il segnale viene distribuito fra le due righe o colonne parallele e, nella ricostruzione,
l'immagine della riga appare più larga e meno intensa. Un fenomeno ancora più complesso si ha
quando l'immagine della riga è leggermente inclinata rispetto alle righe o alle colonne del sensore
bidimensionale. In questo caso si formano quelle che si chiamano le frange di Moirè o di
combinazione: l'immagine sarà interamente contenuta, in alcune zone, all'interno di singoli pixel, ed
occuperà due pixel adiacenti in altre zone. Questo fenomeno è sempre presente quando,
nell'immagine, sono presenti variazioni nette di intensità, come, ad esempio, nell'immagine dei
bordi di un oggetto. Il fenomeno, noto con il nome di "aliasing"(9), è ampiamente trattato negli
studi riguardanti l'"image processing". Dalla teoria del campionamento si ricava che la massima
frequenza spaziale risolvibile è, teoricamente, uguale alla metà della frequenza con la quale si
campiona l’immagine (criterio di Nyquist). In altre parole, per ricostruire in modo corretto
l'immagine di una zona nella quale è presente una rapida variazione di intensità luminosa (come, ad
esempio, il bordo dell'immagine di una lama), il numero di pixel in cui deve essere registrata la
zona deve essere almeno doppio del numero di parti in cui è possibile distinguere le variazioni di
intensità nella stessa zona. Se si vuole risolvere in 10 punti lungo uno degli assi una zona
dell'immagine, è necessario che il numero di sensori su cui si forma l'immagine della zona
interessata sia di almeno 20 pixel indipendenti. E' quindi, errato pensare che, se un CCD è costituito
da 1.000.000 di pixel, la risoluzione ottenibile è pari a 1/1.000.000 della parte di immagine coperta
dal CCD. In realtà il numero di elementi risolti non può superare i 500.000. In pratica altri fenomeni
consigliano di disporre di un numero di pixel almeno 4 volte superiore al numero di punti da
risolvere.
Esistono tecniche (di campionamento e di processing) che permettono di migliorare la situazione
ma difficilmente il criterio di Nyquist può essere eluso.
Un fenomeno analogo si verifica anche temporalmente: se il rivelatore campiona un'immagine con
una certa cadenza temporale (rate), la cadenza temporale con cui l'oggetto del quale si fa l'immagine
si sposta non deve superare la metà di quella di campionamento. Come ulteriore esempio, si
consideri una sorgente che emette impulsi di radiazione con una certa frequenza temporale F; se il
rivelatore che la osserva campiona l'immagine con la stessa frequenza temporale, la sorgente
9
V., ad esempio: The Infrared & Electro-optical Systems Handbook – Vol. 4 – Electro-Optical
Systems Design, Analysis, and Testing - M. C. Dudzik, Editor – SPIE PRESS .
42
potrebbe apparire continua, sempre al massimo di intensità, o al minimo, o a un valore intermedio.
Se il campionamento avviene ad una frequenza almeno doppia, non potrà mai succedere che la
sorgente appaia solo al minimo o solo al massimo di intensità, ma difficilmente sarà possibile
ricostruire il reale andamento dell'intensità. Se la frequenza di campionamento è più elevata, si può
eliminare anche questo inconveniente.
13 Camere termiche
Le camere termiche sono l’equivalente delle telecamere, ma funzionano nell’infrarosso. Tutti i corpi
emettono radiazioni (radiazioni di corpo nero) in cui il cui massimo di intensità in funzione della
lunghezza d’onda dipende dalla temperatura. Le camere termiche usualmente sono in grado di
“vedere” le radiazioni nell’infrarosso emesse dai corpi. In pratica il corpo umano (37° C) presenta il
massimo di emissione intorno alla lunghezza d’onda di 10 µm. Le camere termiche possono
“vedere” i corpi umani al buio.
Le camere termiche più moderne utilizzano array di rivelatori del tutto simili a CCD, ma con un
numero di pixel molto minore. La maggior parte dei rivelatori devono essere raffreddati. Le camere
termiche più diffuse utilizzano array lineari di rivelatori ed un sistema di scansione muove
l’immagine perpendicolarmente all’array. L’elettronica ricostruisce l’immagine, che può essere
presentata su un comune CRT. Le camere termiche più antiche fanno uso di un singolo rivelatore e
l’immagine viene fatta muovere su di esso, in modo da essere completamente scandita.
14 Elementi di radiometria e fotometria
La radiometria e la fotometria si riferiscono alle stesse quantità ma, mentre la radiometria misura le
quantità utilizzando le unità di misura del sistema internazionale (S.I.), la fotometria riferisce tutte
le quantità all’effetto che esse hanno sull’occhio umano. Le curve che caratterizzano la sensibilità
spettrale dell’occhio umano, sono due: la curva fotopica, che si riferisce alla visione diurna, e la
curva scotopica, che si riferisce alla visione notturna (con bassi livelli di luce) .
Tutte le sorgenti devono essere trattate in modo diverso, distinguendo fra sorgenti puntiformi e
sorgenti estese. Sono sorgenti puntiformi quelle che, ai fini della particolare applicazione, non
cambiano la forma o la dimensione vista dall’osservatore, qualunque sia la direzione di
osservazione. La superficie di una sorgente estesa viene vista, da un osservatore, come la sua
proiezione su un piano perpendicolare alla direzione di osservazione (fig. 14.1).
Figura 14.1
43
Mentre una sorgente puntiforme emette la radiazione su 4π steradianti, una superficie estesa emette
tutta la radiazione su π. Se θ è l’angolo che formano fra loro le normali alla superficie emettente e
la normale alla superficie vista dall’osservatore, l’energia sulla superficie osservata, per risalire
all’energia effettivamente emessa dalla superficie radiante, deve essere ridotta secondo il coseno
dell’angolo. L’integrale di cosθ fra –90° e + 90° è π.
L’energia di un fotone Wf (in elettron-volt) è data da:
Wf = hν
dove h è la costante di Planck (6.62 10-34 watt sec2) e ν è la frequenza in Hertz.
λ = c/ν = hc/Wf = 1.24/Wf
dove λ è in µm.
Una superficie piana, perpendicolare ad un fascio di radiazione, è attraversata da N fotoni:
N = P/Wf
dove P è la potenza in watt del fascio e Wf è espressa in watt per secondo.
L’angolo solido si misura in steradianti (sr). Uno steradiante è l’angolo solido sotteso da un
quadrato di area unitaria (ad esempio un metro quadro), sulla superficie di una sfera di raggio
unitario (un metro) (fig.11.2).
Figura 14.2 – definizione di steradiante
Un sfera sottende 4π sr.
L’espressione generale dell’angolo solido Ω (in sr) è:
Ω = A / r2
dove A è l’area della superficie sferica ed r ne è il raggio.
La legge dell’inverso del quadrato della distanza da una sorgente puntiforme stabilisce che la
densità di flusso è inversamente proporzionale al quadrato della distanza.
Le quattro descrizioni geometriche più comunemente in uso in radiometria sono (terminologia
radiometria, terminologia fotometrica):
• il flusso (flusso radiante, flusso luminoso);
• l’irradianza (irradianza, illuminanza);
• l’intensità (intensità radiante, intensità luminosa)
• la radianza (radianza, luminanza).
Il flusso (watt, lumen) è la potenza totale emessa da una sorgente, in tutte le direzioni.
L’irradianza (watt/m2, lux) è il flusso che investe una superficie per unità di area. L’irradianza
descrive la radiazione che incide su una superficie.
L’intensità (watt/sr, candela) è il flusso per unità di angolo solido emesso da una sorgente piccola
rispetto alla distanza di osservazione (sorgente puntiforme).
La radianza (watt/m2 x sr, [lumen/m2] x sr) è l’intensità di una sorgente estesa, per un’area unitaria
quando è vista dalla direzione di osservazione, oppure, in modo equivalente, è il flusso emesso per
44
angolo solido unitario, da una superficie di area unitaria quando è vista dalla direzione di
osservazione. La radianza descrive la radiazione che emana da una superficie.
Le sorgenti di luce sono caratterizzate da:
• L’area della superficie emettente.
• La potenza in watt (in unità radiometriche) o in lumen (in unità fotometriche). E’ il flusso
totale emesso (in tutte le direzioni).
• La densità di flusso “φ” (emittanza in watt/m2), che è la potenza diviso per l’area della
superficie emettente.
• L’intensità “I” (watt/sr), che è la potenza diviso per l’angolo solido di emissione. L’angolo,
in steradianti, deve essere quello effettivamente raccolto, se quest’ultimo è minore di quello
emesso.
• La radianza o luminanza “L” (watt/m2 x sr o lumen/m2 x sr), detta anche brillanza, che è
l’intensità diviso per l’area di osservazione misurata su un piano perpendicolare alla
direzione di osservazione. Se un’area piana emette luce e viene osservata da una direzione
non perpendicolare, l’area da considerare per la radianza è quella delle dimensioni dell’area
per il coseno dell’angolo formato fra la direzione di osservazione e la normale alla
superficie.
La radianza (o luminanza) è costante (a meno delle perdite) lungo tutto un fascio di raggi. La
radianza dell’immagine non può mai superare quella dell’oggetto.
Se un sistema ottico forma l’immagine di una sorgente, se questa immagine è più piccola
dell’oggetto, la sua superficie è minore, ma l’angolo con cui si forma è proporzionalmente più
grande: la luminanza rimane la stessa (o minore a causa delle perdite).
Figura 14.3 – Effetto sull’angolo dell’impiccolimento dell’immagine.
Da questo si deduce che quello che conta, in una sorgente di luce, quando si deve farne l’immagine,
è la sua luminanza e non la sua potenza o le sue dimensioni. A parità di luminanza, due sorgenti di
diversa potenza hanno superfici diverse.
Quando si vuole illuminare un oggetto (la direzione da cui proviene la luce non ha importanza) per
aumentare l’illuminazione (irradianza – watt/m2 - sulla superficie illuminata) si può fare uso di una
sorgente di maggiore potenza o di maggiore superficie. Quando si vuole fare l’immagine di una
sorgente con un sistema ottico, è inutile aumentare la potenza o la superficie della sorgente; si deve
aumentare la luminanza della sorgente.
Quando si fa uso di lampade munite di specchi posteriori di raccolta (in genere parabolici o ellittici)
si può guadagnare energia se si illumina un oggetto; non si guadagna niente nel caso di immagini
nelle quali conta l’angolo (come nel caso di immagini della sorgente formate da sistemi ottici).
E’, a volte, di interesse, valutare la quantità dell’energia emessa dalla superficie di un oggetto a
temperatura nota (per il solo effetto della temperatura). Se l’oggetto fosse un “corpo nero”, per ogni
temperatura sarebbe nota l’energia e lo spettro emessi. Quando l’oggetto non può essere considerato
un “corpo nero” (come avviene normalmente), per conoscere l’energia e lo spettro della radiazione
emessa, è necessario conoscerne l’”emissività”. L’emissività è il rapporto fra la radianza
dell’oggetto e quella di un corpo nero, alla stessa temperatura e alla stessa lunghezza d’onda.
45
In genere l’emissività delle superfici e la direzionalità dell’emissione sono fortemente condizionate
dalla rugosità della superficie stessa; le superfici ruvide hanno un’emissività più elevata (a parità di
materiale).
15 Radar ottico
Pur non essendo un sistema elettroottico, il Radar viene qui superficialmente trattato come
propedeutico ai Radar ottici e ai Lidar.
Il Radar (RAdio Detection And Ranging) invia un fascio di radiazione elettromagnetica, nello
spettro delle microonde con lunghezze d'onda comprese fra 1 mm (radar millimetrici) fino a decine
di metri (radar sounder) e raccoglie la radiazione retrodiffusa con cui ricostruisce l'immagine del
mondo circostante, risolta angolarmente ed in distanza.
Figura 15.1 Schema di un Radar.
Il basso assorbimento da parte dell'atmosfera permette l'ottenimento di grandi portate (fino ad
alcune centinaia di chilometri).
La risoluzione angolare è limitata dalla diffrazione (che è proporzionale alla lunghezza d'onda ed
inversamente proporzionale al diametro dell'antenna). Ad esempio, alla lunghezza d'onda di 1 cm,
con una antenna di 3 metri di diametro, la risoluzione angolare massima ottenibile è di circa 8 mrad
(circa 1/2°) che, ad 1 chilometro di distanza, non permette di distinguere oggetti più piccoli di 8
metri.
Le grandi dimensioni delle antenne radar hanno il doppio scopo di minimizzare gli effetti della
diffrazione e massimizzare, quindi, la risoluzione angolare, e di massimizzare il segnale raccolto,
massimizzando la portata utile. Esistono complesse tecniche di elaborazione dei dati raccolti da un
radar in movimento, che permettono di aumentare sensibilmente la risoluzione angolare effettiva
(SAR). Queste tecniche sono basate sulla ricostruzione delle immagini ottenuta tenendo conto
dell’effetto Doppler che si genera nello swath (area scandita) sul terreno formato dal fascio di
antenna coerentemente con le diverse distanze dai singoli punti relativi al fooprint (zona minima
illuminata senza scansione). In pratica si supera il problema della diffrazione aumentando in modo
sintetico la dimensione dell’antenna nella direzione along track (nella direzione di scansione), dove
si formano le varie storie Doppler, e ottenendo la risoluzione in cross track (nella direzione
perpendicolare alla scansione) mediante una banda opportuna del segnale trasmesso.
La principale applicazione dei radar è nel rilevamento delle caratteristiche di posizione e delle
caratteristiche cinematiche di oggetti remoti: negli aeroporti è utilizzato per il controllo del traffico
aereo anche in presenza di bassa visibilità. In modo analogo è utilizzato sulle imbarcazioni. Le
misure di velocità sono basate sull’effetto Doppler, per il quale la lunghezza d’onda retrodiffusa da
46
un bersaglio in movimento relativo rispetto al radar, nel caso di bersagli in allontanamento dal radar
si allungano, si accorciano, in avvicinamento.
Il Radar ottico, chiamato anche laser radar, analogamente al Radar a microonde, invia un fascio di
radiazione elettromagnetica. Lo spettro di funzionamento è, però, nel visibile (0.4 ÷ 0.7 µm) o nel
vicino (3.5 ÷ 5 µm) o medio infrarosso (8 ÷ 14 µm) e raccoglie il segnale retrodiffuso dagli oggetti
che illumina. Le sorgenti di radiazione di cui si serve sono laser. La lunghezza d’onda impiegata,
molto più breve di quella utilizzata dai radar a microonde, permette di ottenere risoluzioni angolari
molto maggiori, ma la portata è fortemente limitata dall’assorbimento e dalla diffusione da parte
delle particelle sospese nell’atmosfera (nebbia, pulviscolo, ecc.).
I radar ottici, in base alla loro configurazione geometrica, si possono dividere in due categorie:
sistemi monostatici e sistemi bistatici; nei sistemi monostatici il trasmettitore ed il ricevitore sono
coassiali; nei sistemi bistatici gli assi del trasmettitore e del ricevitore formano un angolo e si
incrociano solo alla distanza dalla quale si vogliono ricavare le informazioni. A questo proposito si
deve notare che, mentre nei radar a microonde l’antenna svolge contemporaneamente le funzioni di
trasmettitore e di ricevitore, nei radar ottici la bassissima divergenza dei fasci laser consente di
utilizzare, per la trasmissione, sistemi ottici di piccolo diametro (dell’ordine dei centimetri); per la
ricezione, tuttavia, il basso livello dei segnali disponibili (a causa della scarsa trasparenza
dell’atmosfera e della bassa riflettività dei bersagli) rende necessario l’uso di ottiche di raccolta del
segnale di diametro sensibilmente maggiore (in qualche caso dell’ordine del metro).
Un altro modo per classificare i radar ottici, è in base la modo di utilizzare il segnale ricevuto:
analogamente a quanto avviene nei radar a microonde, molti radar ottici rivelano il segnale
mediante sistemi eterodina. Nei sistemi eterodina, il segnale ricevuto viene sovrapposto ad uno
generato localmente (oscillatore locale); si tratta di una sorgente la cui lunghezza d’onda, e, quindi,
la cui frequenza differisce di poco da quella del segnale trasmesso. La sovrapposizione, che avviene
sulla superficie di un rivelatore, provoca un’interferenza (battimento) ad una frequenza uguale alla
differenza fra le frequenze del trasmettitore e dell’oscillatore locale. La frequenza di questo
battimento si sceglie in modo che sia sufficientemente bassa, da esserne possibile il trattamento con
apparecchiature elettroniche. Infatti la radiazione dei laser ha frequenze dell’ordine di 1014 Hz,
quella del battimento si aggira intorno a pochi megahertz (106 Hz).
La rivelazione eterodina, nel campo ottico, è estremamente difficile, a causa delle brevi lunghezze
d’onda, che impongono requisiti molto stringenti sugli allineamenti e lo stato di polarizzazione delle
radiazioni del segnale e dell’oscillatore locale. Si ricorre, allora, a tecniche “pseudo-eterodina”,
nelle quali il segnale continuo di una sorgente laser viene modulato in ampiezza ad alta frequenza.
L’oscillatore locale è costituito da una sorgente modulata in ampiezza ad una frequenza
leggermente diversa. I due segnali vengono raccolti da uno o due rivelatori, ma il battimento non
avviene sulla superficie di un rivelatore, ma viene prodotto dalla sovrapposizione elettronica dei due
segnali elettrici.
16 Rivelazione diretta , rivelazione coerente e single photon counting.
Nella rivelazione diretta, l’intensità di tutto il segnale che incide sul rivelatore, pesato con le curve
si sensibilità spettrale ed angolare del rivelatore, viene trasformata in un segnale elettrico, la cui
ampiezza segue la curva di risposta del rivelatore (ampiezza del segnale elettrico in funzione del
segnale ottico in ingresso ed in funzione del tempo).
L’intensità del segnale che raggiunge il rivelatore è pari alla somma delle intensità di tutti gli
speckles presenti. Se sulla stessa zona (determinata dalla risoluzione con cui il sistema ottico
convoglia il segnale ottico su rivelatore) incidono due o più fasci elettromagnetici che possono
interferire, l’ampiezza risultante, che è la somma delle ampiezze che, in ciascun istante,
interferiscono, dà luogo ad una intensità pari al suo quadrato. Questo è il fenomeno per il quale si
generano gli speckles. La condizione perché due onde elettromagnetiche possano interferire, è che
abbiano almeno una componente della polarizzazione in comune. Se la lunghezza d’onda è la
47
stessa, la fase relativa di ciascuna di esse è costante nel tempo. Se la lunghezza d’onda è diversa, le
due onde che interferiscono danno luogo a ampiezze che vanno da zero (quando le due radiazioni
sono in opposizione di fase) alla somma delle due ampiezze (quando le fasi coincidono). La
frequenza delle zone temporali (battimento) entro le quali l’ampiezza risultante è diversa da zero,
dipende dalla lunghezza di coerenza della somma delle radiazioni. La frequenza del battimento è
pari alla differenza fra le frequenze che interferiscono. Se la frequenza del battimento supera la
frequenza di risposta del rivelatore, il segnale elettrico è dato dal valore medio del segnale, entro il
tempo di risposta del rivelatore.
Figura 16.1 Battimento prodotto da due onde elettromagnetiche di frequenza diversa
Normalmente i rivelatori non sono in grado di distinguere le varie polarizzazioni: tutto il segnale
incidente contribuisce al segnale di uscita. L’effetto della presenza di speckles, dà luogo solo a
variazioni delle intensità, secondo quanto detto.
La presenza degli speckles dipende solo dalla risoluzione del sistema che convoglia sul rivelatore i
segnali ottici. La massima risoluzione ottenibile con un sistema ottico, in assenza di aberrazioni, è
quella limitata dalla diffrazione (1.22 λ/D x f, nel caso di ottiche circolari, dove λ è la lunghezza
d’onda della radiazione, D è il diametro utile dell’ottica ed f è la distanza dell’immagine dal piano
principale dell’ottica – distanza focale nel caso di oggetto a distanza infinita, 1.22 si riferisce al
semiangolo) . In questo caso il numero degli speckles è dato dalla divergenza del fascio incidente,
diviso per l’angolo di diffrazione del sistema ottico. Se, però, l’effetto angolare delle aberrazioni
supera l’effetto della diffrazione (nei sistemi non diffraction-limited), il numero degli speckles
dipende dall’angolo prodotto dalle aberrazioni (angolo sotteso dall’immagine di un punto rispetto al
raggio principale del sistema ottico – semiangolo -, misurato sulla pupilla di uscita).
Nel caso della rivelazione coerente (eterodina o omodina), alla radiazione incidente sul rivelatore,
viene sovrapposta la radiazione di un “oscillatore locale”. La radiazione incidente può interferire
con l’oscillatore locale, a condizione che abbiano in comune almeno una componente della
polarizzazione. Le radiazioni che interferiscono producono una frequenza di battimento pari alla
differenza delle frequenze della radiazione incidente e dell’oscillatore locale. Se l’oscillatore locale
ha la stessa frequenza della radiazione che si vuole rivelare, il sistema prende il nome di omodina.
Nel caso dell’eterodina, l’oscillatore locale ha una frequenza leggermente diversa da quella della
radiazione che si vuole rivelare: quando la radiazione che si vuole rivelare interferisce con
l’oscillatore locale, la frequenza di battimento è data dalla differenza fra le due frequenze. La
differenza fra le frequenze dell’oscillatore locale e della radiazione che si vuole rivelare, è
sufficientemente bassa da rendere possibile la elaborazione mediante circuiti elettronici. Tutte le
radiazioni incidenti danno luogo ad un segale elettrico. Il segnale in uscita dal rivelatore è costituito
dal un segnale continuo, dovuto a quei segnali che non interferiscono o che lo fanno a frequenze
troppo alte per il rivelatore, e da una parte modulata (per i segnali che interferiscono, dando luogo a
frequenze di battimento sufficientemente basse). Il segnale elettrico in uscita dal rivelatore viene
filtrato per permettere il passaggio delle sole componenti modulate. Se si analizza lo spettro delle
48
componenti modulate, la differenza della frequenza di battimento con l’oscillatore locale fornisce
direttamente la frequenza della radiazione incidente. Si preferisce, normalmente, la rivelazione
eterodina a quella omodina, pur con le difficoltà di generazione della frequenza spostata
dell’oscillatore locale, perché i battimenti a frequenza zero non sono distinguibili dai segnali privi
di battimento.
La rivelazione eterodina agisce come un potente filtro spettrale, perché è facile discriminare la
radiazione con frequenze di battimento diverse da quelle cercate. Inoltre la sensibilità di un sistema
di rivelazione eterodina è molto elevata, perché, per ottenere un segnale alto rispetto al rumore, è
sufficiente iniettare un segnale alto per l’oscillatore locale: una piccola modulazione, dovuta ad un
segnale debole, è facilmente rivelabile. E’, però, estremamente critica (per le radiazioni nello
spettro visibile) perché, per ottenere l’interferenza, è necessario che la polarizzazione
dell’oscillatore locale sia la stessa del segnale che si vuole rivelare, ed è anche necessario che la
forma dei fronti d’onda che devono interferire, sia la stessa.
La condizione essenziale perché un segnale interferisca con un altro segnale con cui si sovrappone è
che abbia in comune almeno una componente della polarizzazione. La condizione essenziale perché
il sistema eterodina sia in grado di rivelare un segnale, è che generi un battimento ad una frequenza
sufficientemente bassa (da essere seguita dal rivelatore). Se la frequenza di battimento non è quella
attesa, il segnale è facilmente eliminato.
La presenza di speckles provoca gli stessi effetti che nella rivelazione diretta, ma l’elettronica che
segue il rivelatore elimina tutta la radiazione la cui frequenza è diversa da quella attesa. La
radiazione potrebbe non interferire con l’oscillatore locale, ma con altra radiazione di frequenza
poco diversa. Tuttavia, la discriminazione della frequenza di battimento rende molto improbabile
l’esistenza di segnali modulati diversi da quelli voluti.
Naturalmente, mentre nella rivelazione diretta, se un segnale è depolarizzato (cioè lo stato di
polarizzazione di ciascun fotone che la compone, può essere diverso), viene, comunque, rivelato,
nel caso dell’eterodina, soltanto le parti che danno luogo a modulazione, e che, quindi, hanno una
componente della polarizzazione in comune con la radiazione con cui si sovrappongono (non
necessariamente l’oscillatore locale), vengono rivelate.
Gli speckles non alterano la polarizzazione, e non hanno, quindi, influenza sul segnale.
Si deve notare, infine, che se la polarizzazione del segnale che si vuole misurare è alterata dal
bersaglio, nei casi nei quali si vuole misurare il segnale retrodiffuso da un bersaglio remoto,
l’intensità del segnale ricevuto da una rivelazione eterodina o omodina, può essere minore di quello
che si misurerebbe con una rivelazione diretta; è un caso comune, quando il bersaglio illuminato
con luce polarizzata linearmente, altera lo stato di polarizzazione della radiazione retrodiffusa.
Per concludere, si può dire che i vantaggi della rivelazione coerente rispetto alla rivelazione diretta,
sono:
• la forte capacità di discriminazione delle lunghezze d’onda, migliore di qualsiasi filtro
spettrale e senza particolari attenuazioni;
• la capacità di rivelare segnali molto deboli, grazie alla possibilità di iniettare un segnale
dell’oscillatore locale di grande intensità, scegliendo le condizioni ottimali di lavoro del
fotorivelatore.
Gli svantaggi principali si devono cercare nella estrema difficoltà realizzativa (specialmente alle
basse lunghezze d’ onda).
La rivelazione mediante “single photon counting” (conteggio dei singoli fotoni), è una rivelazione
diretta, nella quale, in maniera digitale, si contano i foto-elettroni generati. Quando i fotoni
giungono su un rivelatore possono produrre l’emissione di un elettrone. In realtà, però, non è mai
sufficiente un singolo fotone per la generazione di un foto-elettrone. L’efficienza quantica, cioè il
rapporto fra il numero di fotoelettroni generati ed il numero di fotoni incidenti, determina il numero
minimo di fotoni necessario perché sia generato un fotoelettrone. L’efficienza quantica varia con la
lunghezza d’onda della radiazione ed è descritta dalla curva di risposta spettrale del fotorivelatore.
49
La tecnica del single photon counting è una tecnica digitale: ad ogni foto-elettrone generato viene
assegnato il valore di una presenza (1). Il segnale viene elaborato con le tecniche dell’elettronica
digitale. Si presta bene alla misura di segnali molto deboli o molto diluiti nel tempo, perché, a
differenza delle tecniche analogiche, è meno influenzata dai rumori generati dalla catena di
amplificazione elettronica.
17 Lidar
Il Lidar (LIght Detection And Ranging) invia un fascio di radiazione laser nell'atmosfera, raccoglie
la radiazione retrodiffusa e ne misura alcune caratteristiche. Nella forma più semplice il Lidar invia
un impulso di luce monocromatica di breve durata (dell'ordine dei nanosecondi - 10-9 secondi o dei
microsecondi - 10-6 secondi) e di bassa divergenza nell'atmosfera. La radiazione retrodiffusa dagli
aerosoli (particelle sospese nell'atmosfera) o dalle molecole dell'aria viene raccolta da un telescopio
(di solito a specchi) e inviata su un rivelatore. Dalla misura del tempo intercorso fra l'emissione
dell'impulso laser e l'arrivo del segnale retrodiffuso sul rivelatore (tempo di volo) si ricava la
distanza dalla quale proviene il segnale raccolto. Dall'intensità del segnale si ricavano le
caratteristiche di densità del mezzo che ha retrodiffuso il segnale. Dall'andamento temporale
dell'intensità del segnale si ricava la distribuzione longitudinale della densità del mezzo e
dall'andamento trasversale (ottenuto mediante una scansione dello spazio) se ne ricava la
distribuzione trasversale di densità.
Tipi di Lidar : lidar per backscattering elastico, Dial, monostatico, bistatico, nell'UV, nel visibile,
nell'IR.
I lidar per backscattering elastico hanno la sola funzione di raccogliere il segnale retrodiffuso da
particelle (di solito dell’atmosfera) più grandi della lunghezza d’onda; non è necessario, quindi, che
emettano una particolare lunghezza d’onda o che siano particolarmente monocromatici o
polarizzati.
I lidar Dial servono per individuare la distribuzione di particolari sostanze (di solito disperse
nell’atmosfera) sfruttando l’assorbimento di queste sostanze. Emettono due lunghezze d’onda
spettralmente vicine fra loro, o contemporaneamente o a breve distanza di tempo.
I lidar monostatici trasmettono e ricevono il segnale dallo stesso rice-trasmettitore (fig. 5).
I lidar bistatici utilizzano un trasmettitore separato dal ricevitore (fig. 6).
I lidar si possono anche classificare in base alla loro configurazione ottica (ad es. monostatico o
bistatico), o in base al metodo utilizzato per estrarre le informazioni di interesse (ad es.
monocromatico o DIAL) oppure in base alla tecnica di rivelazione utilizzata (ad es. rivelazione
diretta o eterodina).
50
Figura 17.1 Configurazione ottica dei lidar monostatici.
Nei lidar bistatici gli assi ottici del fascio laser trasmesso e dell’ottica del ricevitore giacciono sullo
stesso piano, ma non sono paralleli e si incrociano ad una distanza determinata dal sistema lidar.
Figura 17.2 Configurazione ottica dei lidar bistatici.
I lidar vengono quasi esclusivamente utilizzati per studiare o analizzare gas o aerosoli dispersi
nell’atmosfera, di solito a grande distanza. Il fascio laser trasmesso è, di solito, impulsato.
Dall’intensità del segnale raccolto dal ricevitore, si ricavano le caratteristiche di interesse del target
(di solito atmosferico); dal tempo che intercorre fra l’emissione dell’impulso laser ed il ritorno
dell’eco retrodiffuso, si ricava la distanza da cui proviene il segnale raccolto. I lidar bistatici si
51
prestano meglio per misure a distanze non troppo grandi (centinaia di metri) perché l’assenza di
sovrapposizione del fascio laser trasmesso con il campo di vista del ricevitore, semplifica i problemi
di discriminazione dei segnali provenienti dalla distanza di interesse rispetto a quelli provenienti da
distanze minori o maggiori.
Nella forma più semplice (e più comune) i lidar trasmettono radiazione monocromatica e,
dall’intensità del segnale raccolto, ricavano alcune caratteristiche fisiche dell’atmosfera attraversata
(prevalentemente la densità di aerosoli presenti). Quando, tuttavia, l’interesse riguarda la presenza
di alcune sostanze particolari, si ricorre a tecniche più complesse. Una di queste, chiamata DIAL
(DIfferential Absorption Lidar) permette di rivelare la presenza e la densità di particolari sostanze,
mediante la trasmissione contemporanea o con un breve ritardo, di due impulsi di lunghezze d’onda
diverse: una spettralmente centrata su una riga di assorbimento della sostanza di interesse e l’altra
posizionata in una zona spettrale vicina alla prima, ma per la quale non ci sono assorbimenti
apprezzabili da parte dell’atmosfera. Mentre la prima lunghezza d’onda subisce una attenuazione
proporzionale all’assorbimento della sostanza di interesse, la seconda tiene conto di altri fenomeni,
quali la diffusione e le turbolenze atmosferiche (che influenzano nello stesso modo entrambe le
lunghezze d’onda). Dalla differenza fra i due segnali si ricavano le informazioni riguardanti la
sostanza di interesse.
Un’altra tecnica utilizzata sfrutta lo spostamento della lunghezza d’onda trasmessa, causata
dall’effetto Raman dovuto ad alcune sostanze presenti nell’atmosfera. In questo caso il ricevitore è
opportunamente filtrato spettralmente per consentire di raggiungere il rivelatore alla sola radiazione
che ha subito l’effetto Raman.
Un’altra causa di spostamento della lunghezza d’onda trasmessa è l’effetto Doppler: se la parte
atmosferica che retrodiffonde la radiazione si muove con una componente della velocità nella
direzione dell’asse ottico del ricevitore (di solito gli aerosoli atmosferici trasportati dal vento), la
radiazione retrodiffusa subisce uno spostamento di lunghezza d’onda proporzionale alla velocità.
Questi tipi di lidar sono in grado di misurare le componenti radiali della velocità del vento o di
qualunque target in movimento.
Quando si misura l’intensità in funzione del tempo del segnale retrodiffuso dal bersaglio che
raggiunge il rivelatore, senza operare su di esso nessun pre-processamento, il lidar funziona con la
rivelazione diretta. In questo caso, per garantire che al rivelatore arrivi solo il segnale di interesse, si
eseguono un filtraggio spettrale, che isola la sola radiazione della lunghezza d’onda della quale si
vuole misurare l’intensità, ed un filtraggio spaziale, che fa sì che la sola radiazione proveniente
dalla direzione del bersaglio possa raggiungere il rivelatore. Tuttavia, in queste condizioni non si
raggiunge il massimo della sensibilità possibile. Una tecnica che offre molti vantaggi, dal punto di
vista del rapporto fra il segnale ed il rumore, è quella dell’eterodina ottica (analoga alla tecnica
eterodina utilizzata nelle apparecchiature radio). Il principio di funzionamento di questa tecnica, in
modo molto sintetico, è il seguente : alla radiazione raccolta dal ricevitore (retrodiffusa dal
bersaglio) si sovrappone una radiazione di frequenza leggermente diversa (oscillatore locale). La
differenza di frequenza è dell’ordine di pochi megahertz. Le due radiazioni sovrapposte
interferiscono, dando luogo ad una radiazione di “battimento” alla frequenza differenza fra le due
che interferiscono. Questa radiazione è di frequenza sufficientemente bassa da essere rivelabile con
un adatto rivelatore ed è elaborabile con normali circuiti elettronici. Il primo vantaggio è che, per
ottenere un buon segnale utile, è sufficiente sovrapporre, ad un debole segnale proveniente dal
bersaglio, un forte segnale prodotto dall’oscillatore locale. Il secondo vantaggio è relativo all’ottimo
filtraggio spettrale. Infatti, se la radiazione che raggiunge il rivelatore contiene frequenze che si
discostano, anche di poco, dalla frequenza del segnale, il battimento si sposterà di quantità grandi
rispetto alla frequenza di battimento del segnale, e sarà, quindi, facilmente eliminabile
elettronicamente. Infine, misurando la variazione della frequenza di battimento del segnale, si
ricava, con grande sensibilità, lo spostamento Doppler del segnale retrodiffuso, e si misura con
precisione, quindi, la velocità di spostamento del bersaglio. Con questa tecnica è anche possibile,
quindi, misurare la frequenza e l’ampiezza delle vibrazioni di un target remoto. Lo svantaggio di
52
questa tecnica è che è estremamente complessa la struttura ottica necessaria e sono molto stringenti
i requisiti della sorgente laser, dell’oscillatore locale e delle relazioni di frequenza, di posizione, di
fase, di polarizzazione, ecc., che devono essere mantenute fra i due. Le altissime frequenze della
radiazione nel visibile (λ = 0.5 µm, 6 x 1014 Hertz) rendono quasi impossibile la realizzazione di
sistemi con rivelazioni eterodina ottica nel visibile; lidar con rivelazione eterodina ottica sono stati
realizzati nell’infrarosso, con laser a CO2 (λ = 10.6 µm, 3 x 1013 Hertz).
18 Requisiti del sistema ottico
Il sistema ottico di un Lidar deve permettere l’invio, verso il bersaglio, di un fascio ben collimato di
radiazione laser e deve permettere di raccogliere la maggior quantità possibile di radiazione
retrodiffusa, selezionando la lunghezza d’onda (filtraggio spettrale) e la direzione di provenienza
della radiazione stessa (filtraggio spaziale), per evitare di sovrapporre, al debole segnale utile, il
rumore di radiazione proveniente da altre fonti.
La divergenza del fascio trasmesso verso il bersaglio (specialmente nel caso di lidar monostatici) è,
normalmente, dell’ordine di una frazione di mrad. La divergenza di un tipico fascio laser nel
visibile o nel vicino infrarosso è dell’ordine di alcuni mrad. Per ridurre la divergenza del fascio da
trasmettere, si ricorre agli allargatori di fascio (beam-expanders), la cui struttura ottica è simile a
quella dei telescopi Galileiani, nei quali il fascio laser da allargare entra dalla parte dell’occhio. Un
fascio di 0.1 mrad di divergenza si ottiene con un beam-expander di circa 10÷15 ingrandimenti. Il
diametro del fascio trasmesso diviene di circa 80÷120 mm di diametro. Il fronte d’onda del fascio
che emerge dal beam-expander si discosta da un piano ideale per circa 1/2 lunghezza d’onda. Il
sistema di specchi che permette di indirizzare il fascio nella direzione voluta non deve peggiorare
sensibilmente questa planarità, perché questo corrisponderebbe ad un aumento della divergenza.
Questo significa che la planarità del sistema di specchi deve essere piuttosto spinta e lo stesso
beam-expander deve garantire una grande stabilità nella distanza fra i suoi componenti ottici ed una
buona correzione aberrazionale.
L’ottica del ricevitore, che di solito è costituita da un telescopio a specchi del tipo Cassegrain, deve
avere un diametro utile sufficiente per raccogliere abbastanza segnale. Sul suo piano focale viene
inserito un diaframma, che ne delimita il campo di vista (fig. 10-1).
Figura 18.1 Schema ottico di un ricevitore Lidar.
La radiazione che forma con l’asse ottico del telescopio un angolo maggiore del massimo voluto,
viene intercettata dal diaframma e non può raggiungere il rivelatore.
Le particelle che vengono investite dalla radiazione del trasmettitore, la retro-diffondono entro un
semispazio come una sorgente puntiforme (la radiazione emessa da una sorgente puntiforme si
propaga come una sfera): al crescere della distanza dalla particella, la densità di energia diminuisce
con il quadrato della distanza. A parità di diametro utile del telescopio, la quantità di energia
raccolta da ciascuna particella diminuisce con il quadrato della distanza della particella stessa dal
53
telescopio. Tuttavia, di tutta l’energia raccolta dal telescopio, solo quella compresa entro il campo
di vista del ricevitore, determinato dal rapporto fra il diametro del diaframma posto sul piano focale
e la distanza focale del telescopio, può raggiungere il rivelatore. Il fenomeno della forte variazione
di intensità del segnale raccolto dalle particelle in funzione della distanza, la cui dinamica
facilmente eccede quella massima accettata dal rivelatore (escludendo le zone di saturazione e
quelle sotto la soglia minima di sensibilità), si riduce al diminuire del campo di vista (F.O.V. - Field
Of View) del ricevitore. Tuttavia il F.O.V. del ricevitore deve essere pressoché uguale alla
divergenza del trasmettitore. Il F.O.V. scelto deriva, quindi, da un compromesso fra le difficoltà di
ridurre la divergenza del fascio trasmesso (limitata dalle dimensioni del beam expander e dalla sua
stabilità), dalla capacità da parte del ricevitore di delimitare un F.O.V. sufficientemente piccolo
(limitata dalle aberrazioni, dalla qualità dei componenti ottici, dalla stabilità del telescopio e dalle
possibilità di allineare e mantenere allineati entro tolleranze ragionevoli, il trasmettitore con il
ricevitore), ed i limiti di dinamica del segnale accettabili da parte del rivelatore e dell’elettronica di
elaborazione del segnale.
Il sistema ottico di un Lidar deve permettere l’invio, verso il bersaglio, di un fascio ben collimato di
radiazione laser e deve permettere di raccogliere la maggior quantità possibile di radiazione
retrodiffusa, selezionando la lunghezza d’onda (filtraggio spettrale) e la direzione di provenienza
della radiazione stessa (filtraggio spaziale), per evitare di sovrapporre, al debole segnale utile, il
rumore di radiazione proveniente da altre fonti.
La divergenza del fascio trasmesso verso il bersaglio (specialmente nel caso di lidar monostatici) è,
normalmente, dell’ordine di una frazione di mrad. La divergenza di un tipico fascio laser nel
visibile o nel vicino infrarosso è dell’ordine di alcuni mrad. Per ridurre la divergenza del fascio da
trasmettere, si ricorre agli allargatori di fascio (beam-expanders), la cui struttura ottica è simile a
quella dei telescopi Galileiani, nei quali il fascio laser da allargare entra dalla parte dell’occhio. Un
fascio di 0.1 mrad di divergenza si ottiene con un beam-expander di circa 10 ÷15 ingrandimenti. Il
diametro del fascio trasmesso diviene di circa 80÷120 mm di diametro. Il fronte d’onda del fascio
che emerge dal beam-expander si discosta da un piano ideale per circa 1/2 lunghezza d’onda. Il
sistema di specchi che permette di indirizzare il fascio nella direzione voluta non deve peggiorare
sensibilmente questa planarità, perché questo corrisponderebbe ad un aumento della divergenza.
Questo significa che la planarità del sistema di specchi deve essere piuttosto spinta e lo stesso
beam-expander deve garantire una grande stabilità nella distanza fra i suoi componenti ottici ed una
buona correzione aberrazionale.
19 Schemi ottici dei sistemi Lidar e dei sottoassiemi
Gli schemi ottici di base dei sistemi Lidar, sono illustrati nelle figure 8, 9 e 10. In alcune soluzioni,
il trasmettitore ed il ricevitore sono meccanicamente solidali e sono orientabili verso il bersaglio. In
altre soluzioni un “celostato”, cioè un sistema di specchi, permette di dirigere l’asse comune
trasmettitore-ricevitore, verso il bersaglio, senza spostare materialmente tutte le ottiche. In altre
ancora non esiste la possibilità di puntare il Lidar, ma questo è fisso (di solito puntato sulla verticale
o su un bersaglio fisso, come, ad esempio, il fumo di una ciminiera, per monitorarne la
composizione).
In alcuni casi non si utilizzano sorgenti laser impulsate, ma continue, che permettono di ottenere
qualità del fascio migliori. Quando è necessario ricavare l’andamento delle misure in funzione della
distanza, si ricorre a modulatori di ampiezza del fascio laser (di solito meccanici - chopper) che
permettono l’emissione di segnali impulsati.
Per la misura della componente radiale della velocità del bersaglio con lidar a rivelazione diretta, si
utilizzano analizzatori spettrali ad alta risoluzione e ad alta luminosità (interferometri di FabryPerot).
54
Requisiti delle sorgenti laser.
Le sorgenti laser utilizzate nei Lidar sono, di solito, impulsate. Questo per permettere la misura
delle distanze dalle quali provengono i segnali. Tuttavia, specialmente nei sistemi bistatici, è
possibile fare uso di laser in continua (la distanza si ricava con una triangolazione). Nei lidar
destinati alla misura del backscattering elastico, la lunghezza d’onda emessa viene determinata da
considerazioni che poco hanno a che vedere con le quantità da misurare: vengono scelti laser
compatti, affidabili o economici o la cui radiazione sia facilmente rivelabile dai rivelatori che si
intendono utilizzare.
Le sorgenti laser per l’uso nei Lidar DIAL devono essere in grado di emettere due lunghezze d’onda
vicine, una delle quali deve essere centrata sulla riga di assorbimento della sostanza che si vuole
rivelare, l’altra deve trovarsi in una zona spettrale nella quale non siano presenti assorbimenti. Le
due lunghezze d’onda devono essere emesse contemporaneamente o a breve distanza di tempo. Per
fare questo si ricorre spesso ad OPO (Optical Parametric Oscillator) che permettono di variare con
continuità la lunghezza d’onda emessa.
In alcuni casi è necessario prestare attenzione allo stato di polarizzazione della radiazione emessa.
In particolare, quando le sostanze da rivelare sono in forma cristallina (ad es. ghiaccio), lo stato di
polarizzazione della radiazione retrodiffusa è importante perché i cristalli alterano lo stato di
polarizzazione.
Requisiti di divergenza del fascio.
Il fascio laser, all’uscita dal trasmettitore, deve avere la minima divergenza possibile, perché
l’energia trasmessa deve essere concentrata nel fascio delle minime dimensioni possibili, a tutte le
distanze utili. Il fascio può venire allargato mediante un beam-expander (per ridurne la divergenza)
ma l’invariante di Lagrange richiede che il prodotto del diametro per la divergenza sia una costante;
questo significa che il diametro del fascio non può eccedere le dimensioni dei componenti ottici
attraverso i quali deve passare. Inoltre l’inevitabile l’errore di allineamento fra il fascio trasmesso e
l’asse del ricevitore (specialmente nei sistemi monostatici) non consente campi di vista del
ricevitore troppo piccoli: campi di vista sensibilmente più grandi della divergenza del trasmettitore
tenderebbero ad abbassare il rapporto S/N (segnale/rumore), sovrapponendo al segnale il contributo
delle zone non illuminate dal laser.
Requisiti di durata degli impulsi.
La durata degli impulsi laser determina, insieme all’elettronica, la precisione di misura delle
distanze. In pratica, se l’impulso laser durasse 1 nsec (10-9 sec), poiché la luce percorre in 1 nsec
circa 30 centimetri, e tenendo conto che al ricevitore arrivano segnali che hanno percorso due volte
lo stesso tratto, la precisione nella misura di distanza sarebbe di 15 centimetri. Per rivelare e contare
il tempo con impulsi della durata di 1 nsec, sarebbero necessari rivelatori ed elettroniche di
elaborazione dei segnali con bande passanti migliori di 1 GHz (109 Hz), difficilmente realizzabili.
Inoltre la natura dei laser non consente l’ottenimento agevole di impulsi così brevi. In pratica si
sceglie la durata degli impulsi in base alle necessità dell’applicazione. In pratica, nei Lidar per
applicazioni atmosferiche, è sufficiente una precisione molto minore. Normalmente, poi, la durata a
mezza altezza FWHM (Full Width Half Maximum) di un impulso laser è molto minore del tempo
trascorso fra l’emissione e la ricezione dell’impulso stesso; è, quindi, sufficiente rivelare la presenza
del segnale di interesse e misurarne il ritardo.
Requisiti di lunghezza d'onda.
La lunghezza d’onda del laser utilizzato è scelta in base a varie considerazioni che riguardano,
principalmente, l’applicazione.
Requisiti di purezza spettrale (lunghezza di coerenza).
55
La purezza spettrale dei laser e, quindi, la loro lunghezza di coerenza, è di scarsa importanza
quando la rivelazione non è eterodina o quando non è importante per il particolare tipo di misura.
Viceversa, nel caso di misure DIAL, è necessario che la radiazione emessa sia contenuta
interamente entro la riga di assorbimento della sostanza che si vuole rivelare. Anche nelle misure di
velocità basate sull’effetto Doppler, lo spostamento spettrale può essere molto ridotto; è, quindi,
necessario che la larghezza della riga laser sia piccola rispetto allo spostamento atteso. L’effetto
Doppler può essere espresso come:
spostamento in frequenza = (2vHz)/c
dove v è la velocità del target, Hz è la frequenza della luce e c ne è la velocità. Per una velocità di 1
metro x secondo ed una radiazione laser della lunghezza d’onda di 1 µm (314 Hz), lo spostamento in
frequenza è di 20 MHz. La larghezza di banda della radiazione laser impulsata è normalmente,
sensibilmente maggiore di 20 MHz.
Requisiti del ricevitore.
Il telescopio del ricevitore deve raccogliere la radiazione retrodiffusa dal target e la deve
convogliare sul filtro spaziale (che impedisce il passaggio della radiazione esterna al campo di vista
voluto). Naturalmente l’energia raccolta è proporzionale alla sua area utile; deve, quindi, avere un
diametro adatto alle funzioni che deve svolgere. Nel caso di ricevitori per lidar atmosferici che
devono misurare deboli fenomeni atmosferici a vari chilometri di distanza, si fa uso di telescopi con
diametri utili superiori al metro. L’intensità del segnale ricevuto dipende dalla potenza trasmessa,
dalla riflettività del target, dalla divergenza del fascio trasmesso, dalla qualità dell’allineamento fra
trasmettitore e ricevitore e dalla sensibilità del rivelatore. La potenza del laser è in contrasto con la
qualità del fascio trasmesso. E’, quindi, necessario un compromesso fra la potenza del laser ed il
diametro del ricevitore. Le dimensioni del filtro spaziale dipendono dalla divergenza del
trasmettitore e dalla distanza focale dell’ottica di raccolta: maggiore è la distanza focale, maggiore è
il diametro del filtro spaziale. Questi ragionamenti non tengono conto delle aberrazioni del sistema
ottico e degli errori di messa a fuoco e di allineamento.
Il filtro spettrale deve avere una banda passante il più vicino possibile a quella del laser. La sua
banda di reiezione deve impedire il passaggio di quelle radiazioni, non provenienti dal laser, che
potrebbero essere raccolte dall’ottica e rivelate dal rivelatore. Una banda particolarmente stretta,
anche se realizzabile, è, in generale poco trasparente (trasparenza di picco).
Il rivelatore e l’elettronica che lo segue devono possedere una banda passante adeguata alla
precisione di misura desiderata.
Le tecniche di rivelazione adottabili sono:
• la rivelazione diretta
• la rivelazione eterodina
• il single photon counting
20 Telemetri ottici passivi
I telemetri ottici passivi misurano la distanza dei bersagli con tecniche di triangolazione: se si
dispongono due telescopi di puntamento ad una distanza reciproca fissa e nota e si orientano i due
telescopi in modo che entrambi siano puntati su un unico bersaglio remoto, è possibile ricavare
l’angolo sotteso dal bersaglio comune rispetto alla base, agli estremi della quale sono montati i due
telescopi. Si può, così, costruire un triangolo nel quale sono noti tutti gli angoli e la lunghezza di un
lato (la base). Si può, quindi, facilmente ricavare l’altezza del triangolo, cioè la distanza del
bersaglio (fig.1).
56
Figura 20.1
La precisione con cui è possibile misurare le distanze è funzione, prevalentemente, di tre fattori:
• La distanza fra i due telescopi, cioè la larghezza della base di misura.
• La precisione con la quale è possibile centrare ciascuno dei due telescopi su un punto
determinato del bersaglio.
• La precisione con la quale è possibile misurare l’angolo sotteso dal bersaglio rispetto a
ciascuno dei due telescopi.
21 Telemetri ottici attivi
I telemetri ottici attivi sono di due tipi; entrambi misurano le distanze misurando il tempo che un
breve impulso di luce impiega per raggiungere il bersaglio e per tornare all’operatore (a tempo di
volo). I più semplici si avvalgono di laser ad impulsi. I radar ottici, che fanno uso di laser in
continua e che rivelano il segnale con la tecnica eterodina, per la misura della distanza utilizzano
una particolare modulazione del segnale. Di solito i telemetri ottici attivi a tempo di volo fanno uso
di laser “ad impulsi”. La durata degli impulsi può variare da pochi nanosecondi (10-9 sec.) a qualche
microsecondo (10-3 sec). In 1 nanosecondo la luce percorre 3 metri. Considerando che la luce,
raggiunto il bersaglio, torna indietro, la luce percorre, nella misura della distanza, 1,5 metri in un
nanosecondo. Per percorrere 5 km la luce impiega 1/60000 sec (1.7 10-6 sec – 1700 10-9 sec). Il
contatore del tempo, in un telemetro a tempo di volo, deve contare 1700 impulsi da 1 nanosecondo
per 5 km di distanza. Questa soluzione è resa particolarmente complessa per la scarsa disponibilità
di rivelatori sufficientemente veloci (1 GHz di banda passante) e per la complessità dell’elettronica.
In pratica la maggior parte dei telemetri ad impulsi misurano le distanze entro ± 10 metri.
22 Velocimetri laser
La velocimetria laser è utilizzata per la misura della velocità trasversale (rispetto alla direzione di
misura), di fluidi nei quali è presente qualche particella diffondente. E’ utilizzata a brevi distanze,
per la misura della velocità di fluidi ad uso industriale, ma è anche utilizzata, nella versione basata
sull’effetto Doppler, per la misura della velocità dei venti trasversali, da parte di aerei.
Quest’ultima misura è particolarmente importante, per preavvertire il pilota della presenza dei
pericolosissimi “wind shear”.
La velocimetria laser è basata su due concetti: la misura della differenza fra le posizioni di un
oggetto in due tempi successivi oppure sull’effetto Doppler. La misura della differenza fra le
posizioni di un oggetto in due tempi diversi è utilizzata, ad esempio, nelle tecniche PIV (Particle
57
Image Velocimetry) nella quale viene memorizzata (mediante fotografia o telecamera) la posizione
di particelle diffondenti immerse in un fluido in movimento, che si muovono lungo la superficie
piana di una sorgente di luce (di solito un laser). La sorgente genera due impulsi di luce in tempi
successivi: le particelle si sono spostate e le due immagini permettono di misurare l’entità e la
direzione dello spostamento. In modo analogo, se si misura la distanza di un oggetto (ad esempio,
mediante un telemetro laser a tempo di volo) in due tempi successivi, se ne può ricavare la velocità
(radiale; la componente della velocità nella direzione di osservazione).
L’effetto Doppler è il fenomeno per il quale la lunghezza delle onde che costituiscono l’onda
acustica o la radiazione ottica, si accorcia se l’oggetto che emette o riflette il segnale è in
avvicinamento; si allunga se è in allontanamento. Poiché la lunghezza d’onda della radiazione
emessa varia (il suono diviene più acuto o più basso, nel caso delle onde acustiche, il colore della
luce si sposta verso il blu o il rosso, nel caso della luce), dalla differenza fra il segnale originale e
quello spostato, è possibile ricavare la velocità dell’oggetto. E’ il ben noto fenomeno che si osserva
quando una sirena è in avvicinamento o in allontanamento. Mediante lo stesso tipo di fenomeno, nel
campo della luce, è possibile misurare la velocità di allontanamento dei corpi celesti dalla terra.
Nel campo della radiazione elettromagnetica (del tipo della luce, ad esempio), mediante l’effetto
Doppler, si possono effettuare tre tipi di misure: l’eterodina ottica, l’analisi spettrale
interferometrica o la LDV (Laser Doppler Velocimetry). Mentre le prime due effettuano misure di
velocità nella direzione di osservazione, l’LDV misura velocità in una direzione trasversale.
Nell’eterodina ottica si fanno interferire, su un rivelatore, due segnali provenienti dallo stesso laser:
uno diretto (e opportunamente spostato in lunghezza d’onda - oscillatore locale) e l’altro diffuso
dall’oggetto in movimento. L’interferenza fra i due segnali fa sì che dal rivelatore esca un segnale
elettrico modulato, la cui frequenza è pari alla differenza fra le frequenze dei due segnali (fig. 221).
Figura 22.1
La frequenza del segnale prodotto è adatta all’elaborazione elettronica (la frequenza della luce è
troppo alta perché possa essere elaborata elettronicamente). Lo spostamento della frequenza
nell’oscillatore locale serve per impedire che la frequenza del segnale di interferenza sia troppo
bassa. Se la frequenza dell’oscillatore locale non viene cambiata, la tecnica di misura prende il
nome di omodina.
Le differenze di lunghezza d’onda si misurano mediante le tecniche della spettroscopia. Quando le
velocità da misurare sono piccole, occorrono analizzatori spettrali di grande risoluzione: in questo
caso si utilizzano gli interferometri di Fabry-Perot. Con questa tecnica si misurano, ad esempio, le
componenti radiali della velocità dei venti ad alta quota (con tecniche LIDAR).
Nell’LDV due fasci laser, provenienti dallo stesso laser, si incrociano nello spazio generando un
insieme di “frange di interferenza” (fig.22.2 e 22.3).
58
Figura 22.2
Figura 22.3 Schema proposto da W.H. Stevenson.
Si tratta di superfici di luce piane, perpendicolari alla direzione del flusso o ad una sua componente,
che si generano quando le ampiezze dei segnali ottici coerenti (laser) si sommano in fase. Quando
una particella, immersa in un fluido in movimento, attraversa i piani interferenziali, diffonde la luce
del fascio laser che sta attraversando. Poiché, nelle frange di interferenza, coesistono i due fasci, la
particella diffonde le due frequenze. Per effetto Doppler, per uno dei fasci, la particella si allontana,
e la frequenza della radiazione diffusa è più bassa; per l’altro fascio, la particella si avvicina e la
frequenza diffusa è maggiore. La frequenza della radiazione che diffonde la particella è, quindi,
l’effetto combinato delle due frequenze. E’, cioè, la differenza fra le due frequenze Doppler. Le due
frequenze sovrapposte, interferiscono, dando luogo ad una frequenza risultante, pari alla differenza
fra le due frequenze (νDoppler). La spaziatura fra le frange di interferenza “d” si calcola facilmente
conoscendo la lunghezza d’onda del laser (λ) e l’angolo (Θ) che formano fra loro i fasci che si
incrociano (d = (2λ)/sinΘ). La frequenza νDoppler si ricava dal segnale raccolto dal rivelatore (fig.
22.4). Dividendo questa frequenza per la spaziatura “d”, si ricava la componente della velocità nella
direzione perpendicolare alle frange.
Figura 22.4- Segnale elettrico all’uscita dal rivelatore, per una particella che attraversa le frange.
59
23 Fabry Perot
Gli interferometri di Fabry Perot piani sono costituiti da due specchi semiriflettenti, paralleli (fig.
23.1).
Figura 23.1
Un raggio che incide sul primo specchio, viene parzialmente trasmesso ed incide sul secondo
specchio. Viene, di nuovo, parzialmente trasmesso, ma la parte non trasmessa viene riflessa verso il
primo specchio. Il processo si ripete fino a quando il raggio esce dagli specchi. I fasci trasmessi dal
secondo specchio sono tutti paralleli fra loro, e il sistema ottico di focalizzazione (rappresentato con
una lente semplice, per semplicità) li fa convergere in un punto, sul proprio piano focale. Le fasi dei
raggi che giungono sul piano focale del sistema ottico, hanno, se la radiazione è monocromatica,
una differenza di fase uguale al cammino percorso fra due riflessi successivi, fra i due specchi. Se la
spaziatura fra gli specchi è tale che, tenendo conto dell’angolo che i raggi formano con la normale
agli specchi (la spaziatura moltiplicata per il coseno dell’angolo), provoca una differenza fra due
riflessioni consecutive esattamente di un numero intero di lunghezze d’onda alla lunghezza d’onda
della radiazione, nel punto di fuoco tutti i raggi hanno la stessa fase: le ampiezze si sommano e
l’intensità ne è il quadrato. Grazie alla simmetria assiale del sistema, tutti i raggi che, con la stessa
lunghezza d’onda, incidono sul primo specchio con lo stesso angolo rispetto alla normale, formano
un punto sul piano focale dell’ottica di focalizzazione: tutti i raggi con la stessa distanza angolare
dalla normale descrivono un cerchio centrato intorno alla normale stessa passante per il centro della
pupilla di ingresso dell’ottica). Se l’angolo di incidenza cambia, le fasi dei vari raggi cambiano, e la
somma delle ampiezze diminuisce: il picco diminuisce, fino ad annullarsi. La diminuzione è tanto
più rapida, quanti più sono i raggi che si sommano: il picco è più stretto.
Se l’angolo di incidenza è Θ e d è la spaziatura tra le superfici riflettenti, i massimi per la lunghezza
d’onda λ sono disposti secondo la legge
60
mλ = 2 d cos Θ
dove m è un numero intero, ed indica il numero intero di lunghezze d’onda necessario perché la
stessa lunghezza d’onda raggiunga di nuovo un massimo: ciascuna lunghezza d’onda produce i
massimi successivi ogni volta che il cammino ottico effettivo diviene pari ad un numero intero di
lunghezze d’onda.
Se la lunghezza d’onda della radiazione cambia, cambia la posizione angolare degli anelli. Man
mano che l’angolo aumenta, è sufficiente una variazione angolare più piccola, per ottenere la stessa
differenza di fase: i cerchi periferici divengono sempre più fitti (il coseno dell’angolo diminuisce).
Ogni lunghezza d’onda produce una serie di anelli spostata rispetto a quelli prodotti da un’altra
lunghezza d’onda per la quale la spaziatura fra gli specchi non è un multiplo della lunghezza
d’onda: l’interferometro di Fabry Perot è un analizzatore spettrale. La radiazione incidente, però,
non viene dispersa (come avviene con i prismi o con i reticoli di diffrazione) ma viene trasmessa
solo quella parte di radiazione il cui spettro coincide con quello che, con quell’angolo e quella
spaziatura, può essere trasmesso; il resto della radiazione viene riflessa.
Quando per due radiazioni la spaziatura produce differenze di fase che sono un numero intero di
lunghezze d’onda, le radiazioni si sovrappongono: la distanza spettrale fra le due lunghezze d’onda
più vicine che si possono sovrapporre è il “Free Spectral Range” (libero intervallo spettrale)
dell’interferometro.
Se la spaziatura fra gli specchi è grande rispetto alla lunghezza d’onda, cioè se d è grande, è
sufficiente una piccola variazione dell’angolo perché un’altra lunghezza d’onda raggiunga un
massimo, cioè il cammino ottico (2d cos Θ) sia lungo un numero intero di lunghezze d’onda: il Free
Spectral Range diminuisce.
La larghezza di ciascun picco trasmesso è determinata da quanti riflessi si sommano (diametro
dell’interferometro), dall’energia che ciascuno di essi trasporta (assorbimenti), dalle perdite dovute
ad imperfezioni della finitura superficiale degli specchi (scattering), dalla non perfetta planarità e
dagli errori di parallelismo degli specchi (errori di fase). Il massimo numero di contributi spettrali in
cui può essere diviso un Free Spectral Range è la Finesse.Un Fabry Perot con un Free Spectral
Range di 100 Å ed una Finesse di 10, può risolvere 10 Å.
L’interferometro di Fabry Perot non disperde la radiazione, ma trasmette, con angoli diversi,
radiazioni di lunghezza d’onda diversa. Se la radiazione incidente ha una larghezza di banda
superiore alla larghezza che l’interferometro può risolvere, la radiazione incidente ha, quindi, una
lunghezza di coerenza minore di quella che avrebbe una radiazione larga quanto la banda trasmessa
dall’interferometro, la radiazione trasmessa ha effettivamente la banda del Fabry Perot: in questo
senso il Fabry Perot è un allungatore di coerenza.
Perché una radiazione monocromatica venga trasmessa, deve incidere sull’interferometro con
l’angolo giusto: in caso contrario la radiazione verrà riflessa.
Malgrado da bassa trasmissività degli specchi, quando una radiazione è in condizioni di essere
trasmessa (con il giusto angolo per la lunghezza d’onda), la trasmissività si avvicina al 100% (in
pratica, i difetti e gli assorbimenti, impediscono di raggiungere questo valore).
La trasmissività di picco τ è data da:
τ = {1 – [A / (1 – R)]}2
dove A è l’assorbimento degli specchi ed R è la loro riflettività.
Si deve, però, notare che il fattore di contrasto C, cioè il rapporto fra segnale trasmesso massimo e
segnale trasmesso minimo è dato da:
2
C = [(1 + R) / (1 – R)] ;
se la riflettività aumenta, il contrasto aumenta. Ma quando la riflettività aumenta, cresce anche
l’assorbimento e diminuisce la Finesse. Quindi necessario scegliere un compromesso.
L’interferometro di Fabry Perot è largamente utilizzato come base per la realizzazione di molti filtri
interferenziali.
Quando la spaziatura fra gli specchi non è regolabile, lo strumento viene comunemente chiamato
“etalon”.
61
62
Scaricare