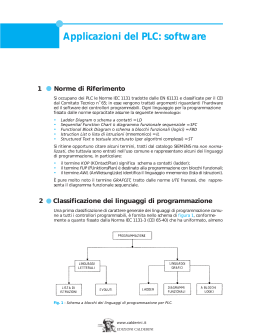
39 Il linguaggio grafico a contatti Diagramma a contatti, ladder, diagramma a scala sono nomi diversi usati per indicare la stessa cosa, il codice grafico per la programmazione dei PLC con il linguaggio a contatti. Il ladder, relativo a ogni specifica applicazione, può essere disegnato dopo aver terminato lo studio del comando e averlo sintetizzato nello schema funzionale. 1. Conversione del diagramma a relè in schema a contatti Consideriamo lo schema a relè del circuito di autoritenuta della figura 1, detto anche di marcia e arresto, che costituisce una delle possibili forme di schema funzionale. In esso compaiono gli elementi principali della logica a relè ovvero contatti NA (PM e u), contatti NC (PA ), bobine (U), collegamenti; la freccia y indica il flusso di potenza, la freccia x individua il flusso logico. Lo schema a relè è trasformabile in diagramma a contatti mediante le seguenti semplici modifiche: ● Fig. 1. Circuito di autoritenuta. ● ● ● ● le linee che rappresentano l’alimentazione vengono disegnate verticalmente; i simboli dei contatti NA, di quelli NC e delle bobine vengono semplificati come mostrato nella figura 2; ogni circuito viene disegnato in posizione orizzontale invece che verticale; il flusso di potenza va da sinistra verso destra; il flusso logico va dall’alto verso il basso. Fig. 2. Principali simboli grafici del linguaggio a contatti. Fig. 3. Diagramma a contatti del circuito di autoritenuta. Con tali convensioni lo schema del circuito di autoritenuta della figura 1 si trasforma facilmente nel diagramma a contatti della figura 3; la linea verticale sinistra, detta barra, può essere pensata come la linea in cui è presente la tensione, quella destra come la linea posta a massa; il flusso di energia può andare pertanto solo da sinistra verso destra ed è pertanto all’estremità destra che deve essere posta la bobina da azionare. Lo schema della figura 1 è costituito da un solo circuito; a esso corrisponde un diagramma a contatti a una sola linea logica; quando nello schema ci sono più circuiti, le linee che li rappresentano vengono poste in parallelo alla prima, dando luogo a un’immagine grafica molto vicina a quella di COMANDI PROGRAMMABILI (PLC) 203 39 – Il linguaggio grafico a contatti una scala a pioli (fig. 4); da questa somiglianza discendono i nomi ladder o diagramma a scala. La linea di massa può anche essere omessa; tutto il tratto della linea logica a sinistra della bobina è detto zona test. I contatti NA e NC, se uniti da linee orizzontali, realizzano la funzione AND, se uniti in verticale realizzano la funzione OR. Fig. 4. Forma a scala del diagramma a contatti. Con riferimento alla figura 3 i contatti PM e u realizzano la somma logica OR (PM u) essendo collegati in parallelo; tale somma è messa in AND, ovvero in serie, con il contatto NC PA per dare come risultato finale la funzione logica: U (PM u)PA dove con la lettera maiuscola U è individuata la bobina del relè, mentre con la lettera minuscola corrispondente u è identificato un contatto NA dello stesso relè. Nelle figure 5, 6, 7 e 8 sono descritte le trasformazioni rela- Fig. 5. Trasformazione in diagramma a contatti di uno schema elettrico funzionale con bobine parallele. Fig. 6. Trasformazione in diagramma a contatti di uno schema elettrico funzionale con diramazioni. Fig. 7. Trasformazione in diagramma a contatti di uno schema elettrico funzionale con ponticello continuo. 204 COMANDI PROGRAMMABILI (PLC) 39 – Il linguaggio grafico a contatti Fig. 8. Trasformazione in diagramma a contatti di uno schema elettrico funzionale con ponticello interrotto. tive ad alcuni casi particolari, mettendo in evidenza l’errore che deve essere evitato. Il ladder operativo reca i codici d’identificazione di ogni elemento funzionale in sostituzione di quelli alfanumerici generalmente usati nello schema funzionale (per esempio PM, PA, ecc. saranno sostituiti da E0, 0, E0, 1, ecc. secondo la tabella di configurazione I/O). 2. Programmazione di un sequenziatore logico Il sequenziatore logico è un dispositivo, realizzabile con tecnologia pneumatica o elettrica o elettronica, che funziona secondo il principio delle memorie di fase; il suo impiego è molto diffuso in automazione poiché consente di risolvere, abbastanza facilmente, qualsiasi problema di logica sequenziale. Indipendentemente dalla tecnologia con cui è costruita, ciascuna memoria di fase è un modulo logico standard composto da: ● ● ● una memoria a disattivazione prevalente; un elemento AND; un elemento OR. Il sequenziatore è costituito dal collegamento di tanti moduli quante sono le fasi del comando. Il modulo n, quando viene attivato, attraverso l’elemento AND del modulo precedente n 1 provoca le tre azioni seguenti: ● ● ● attivazione dell’uscita di fase (n); azzeramento della memoria precedente (n 1); predisposizione della memoria successiva (n 1). L’attivazione dell’uscita consente tutte le azioni degli attuatori che devono avvenire nella fase ad essa corrispondente. L’azzeramento della memoria n 1 avviene attraverso l’elemento OR; la memoria n 1 viene invece predisposta attivando un ingresso dell’elemento AND in modo che, all’arrivo del segnale di consenso, possa essere generato il comando della fase successiva. COMANDI PROGRAMMABILI (PLC) 205 39 – Il linguaggio grafico a contatti Per ottenere un simile comportamento con il PLC è necessario programmare una linea logica come indicato in figura 9; l’autoritenuta si rende necessaria per svincolare l’uscita di fase dalla durata dei segnali di predisposizione e di consenso. 3. Istruzioni di temporizzazione Fig. 9. Linea logica per la simulazione di una memoria di fase. Fig. 10. Sintassi dell’istruzione di temporizzazione. Ogni PLC è in grado di fornire contemporaneamente un certo numero di temporizzatori (timer); questi, come mostra la figura 10, sono costituiti da un ingresso di lancio, una bobina d’uscita e un valore preset di ritardo, che può essere impostato tra un valore minimo e un valore massimo dipendente dal modello di PLC. Le condizioni d’ingresso possono essere espresse da una qualsiasi combinazione di logica a contatti. Il tipo di timer prevalentemente simulato è quello ritardato all’eccitazione, detto a decremento, il cui funzionamento è il seguente: esso viene attivato quando sono verificate le condizioni d’ingresso, quindi il ritardo impostato decrementa finché raggiunge lo zero; a questo punto viene attivata la bobina d’uscita che a sua volta resta attiva fino a quando le condizioni d’ingresso non sono più verificate. Ogni timer ha un numero illimitato di contatti NA ed NC che possono essere usati in qualsiasi punto del programma. Fig. 11. Esempio di programmazione di un timer. Nell’esempio della figura 11 le condizioni d’ingresso sono rappresentate dall’AND tra I1, che è un contatto NA, e I2, che è un contatto NC, per cui sono verificate non appena viene attivato I1; a partire da questo istante il timer T1 inizia il conteggio dei 4,5 secondi, terminato il quale attiva la sua bobina d’uscita; questa resterà attivata finché non si verifica una delle due condizioni: attivazione di I2 o disattivazione di I1. Altri tipi di temporizzazione (ritardo alla diseccitazione, ritardo ad intermittenza, ecc.) si possono ottenere in fase di programmazione combinando il timer con altri elementi logici o sequenziali. 4. Istruzioni di conteggio I contatori elettromeccanici sono dispositivi che commutano i loro contatti dopo che un evento si è verificato un numero di volte preimpostato; vengono molto impiegati nell’automazione dei processi produttivi; possono essere di due tipi: ● Fig. 12. Istruzione di conteggio unidirezionale. 206 COMANDI PROGRAMMABILI (PLC) ● unidirezionali (a incremento o a decremento), reversibili. Nei PLC vengono simulati entrambi; ogni contatore del primo tipo è costituito da un ingresso di conteggio, un ingresso di riassetto, una bobina d’uscita, un valore di preselezione di conteggio (preset) e un registro di conteggio corrente. Come si può osservare dalla figura 12 i contatori, a differenza 39 – Il linguaggio grafico a contatti dei timer, richiedono due linee logiche per controllare il loro funzionamento: la condizione d’ingresso e la condizione d’azzeramento o di riassetto; ciascuna di queste due linee può essere costituita da una qualsiasi combinazione logica di contatti. La condizione d’ingresso stabilisce quando il registro di conteggio va incrementato (o decrementato). Quando questa condizione commuta da off a on il valore corrente viene aumentato di 1; per registrare un altro incremento (o decremento) la linea d’ingresso deve prima interrompersi per poi far avvenire un’altra transizione da off a on. La condizione d’azzeramento, ovvero la seconda linea logica, controlla la messa a zero del valore corrente di conteggio; ovviamente questo vale nel caso del contatore a incremento mentre, nel caso di quello a decremento, il valore corrente di conteggio viene posto pari al valore di preselezione. Il valore preset di conteggio può essere impostato dall’utente tra un minimo e un massimo che dipende dal modello del PLC. I contatori reversibili sono costituiti come quelli unidirezionali con l’aggiunta di un ingresso d’incremento Up, mentre l’altro (quello di decremento) prende il nome di Down. Fig. 13. Istruzione di conteggio reversibile. Il loro funzionamento è illustrato nella figura 13: il contatore incrementa o decrementa di uno il valore di conteggio ogni volta che si verificano le condizioni d’ingresso Up o quelle d’ingresso Down; l’uscita del contatore si attiva solo quando il valore di conteggio è stato incrementato o decrementato fino al valore preset; quando i segnali Up e Down sono contemporanei non si verifica alcun conteggio. I contatori sono sempre ritentivi. COMANDI PROGRAMMABILI (PLC) 207 Esercizi ■ 39 Il linguaggio grafico a contatti Esercizio 1. Il linguaggio grafico a contatti Trasformare lo schema elettrico della figura 14, relativo al comando elettropneumatico del ciclo automatico/semiautomatico A A di un cilindro pneumatico a d.e., in diagramma a contatti. Fig. 14. Soluzione Il risultato è riportato in figura 15. è riportato in figura 17; sono presenti cinque segnali bloccanti; utilizziamo il metodo del sequenziatore simulandolo con il PLC. In base alla figura 9 e alla configurazione I/O della figura 18a si ottiene il diagramma ladder della figura 18b. Ciascuna uscita è indicata con On, dove n è il numero della fase; i movimenti corrispondenti sono riportati a lato di ogni linea logica; il ciclo ha otto fasi e pertanto si hanno otto linee logiche; si può verificare, per esempio, che quando viene attivata l’uscita O4, collegata al lato negativo del distributore di B, si ha: ● la corsa di ritorno del cilindro B; ● la disattivazione dell’uscita precedente O3; ciò avviene attraverso l’apertura del contatto NC O4 posto in serie al contatto di autoritenuta della bobina; ● la predisposizione della bobina di fase successiva O5; ciò avviene attraverso la chiusura del contatto NA O4, che è posto in serie al finecorsa b0 ovvero al segnale che avvisa il controllore del termine della fase B. I collegamenti dei finecorsa e delle elettrovalvole con gli ingressi e le uscite del PLC, per ottenere Fig. 15. ■ Esercizio 2. Sequenziatore logico Disegnare il ladder per comandare con il PLC il ciclo automatico A A B B C D D C di quattro cilindri pneumatici a d.e. Soluzione Il blocco di potenza del comando da realizzare è quello della figura 16; il diagramma delle fasi Fig. 16. Circuito di potenza con 4 cilindri a d.e. 208 COMANDI PROGRAMMABILI (PLC) Fig. 17. 39 – Il linguaggio grafico a contatti il funzionamento desiderato, devono essere quelli schematicamente indicati nella figura 19 che si riferisce ad un generico PLC. a) Fig. 18. a) Configurazione I/O; b) diagramma a contatti. b) Fig. 19. Cablaggio I/O. COMANDI PROGRAMMABILI (PLC) 209 39 – Il linguaggio grafico a contatti ■ Esercizio 3. Temporizzatore Attivare un dispositivo di campo, con un certo ritardo dalla commutazione di un selettore su on, e disattivarlo con un altro ritardo dopo la commutazione del selettore su off. Soluzione Il risultato è dato in figura 20 dove sono stati usati due timer per fornire, per esempio, ritardi di 8 e di 4 s. Fig. 20. Ritardo all’eccitazione e alla diseccitazione. ■ Esercizio 4. Comandi temporizzati di un attuatore pneumatico Disegnare il diagramma a contatti per ottenere con il PLC i seguenti comandi temporizzati del cilindro pneumatico della figura 21: ● corsa A con ritardo dall’azionamento del pulsante di marcia; ● corsa A con ritardo dall’azionamento del pulsante di marcia; ● corsa A con ritardo dal rilascio del pulsante di marcia; ● corsa A con ritardo dal rilascio del pulsante di marcia. Soluzione La corsa A con ritardo dall’azionamento del pulsante di marcia si ottiene con il ladder di figura 22; la bobina del timer si attiva dopo 4 s dal verificarsi delle condizioni d’ingresso che sono costituite dall’azionamento di PM; il contatto NA del timer che comanda l’elettrovalvola A si chiude quindi con 4 s di ritardo dopo che PM è stato premuto. Nel caso della corsa A con ritardo dall’azionamento del pulsante di marcia, la posizione di partenza è quella con stelo avanzato per cui indipendentemente da PM l’elettrovalvola A deve essere attiva e questo è quanto accade con il programma della figura 23. Inserendo nel PLC il programma derivante dal ladder della figura 24, all’azionamento di PM si eccita l’elettrovalvola e pertanto si ha la corsa A; finché si tiene premuto PM il suo contatto NC fa sì che il timer sia inattivo e che A rimanga eccitata; non appena si rilascia PM si chiude tale contatto, ed essendo chiuso anche quello NA della bobina A, si verificano le condizioni d’ingresso che lanciano il temporizzatore, il quale 210 COMANDI PROGRAMMABILI (PLC) Fig. 22. Fig. 21. Circuito di potenza. Fig. 23. Fig. 24. Fig. 25. passati 8 s apre il suo contatto NC, diseccita la bobina A e consente il rientro dello stelo, ottenendo la corsa di ritorno con ritardo dal rilascio del pulsante di marcia. Con riferimento al diagramma a contatti della figura 25, premendo PM si ha la corsa A poiché 39 – Il linguaggio grafico a contatti il contatto NC del relè ausiliario interno si apre e quindi si diseccita l’elettrovalvola. Lasciando PM si chiude il contatto NC dell’ultima linea del diagramma e, poiché il relè interno è eccitato, si verificano le condizioni di lancio del temporizzatore che, trascorsi 10 s, apre il suo contatto NC diseccitando la bobina di controllo interna, si chiude il contatto NC della seconda linea logica e si eccita la bobina A. ■ Esercizio 5. Impiego dei contatori Disegnare il ladder per comandare con il PLC il ciclo automatico con corse ripetitive A A A A B B B B. Soluzione Il circuito di potenza è ancora quello della figura 16; la tabella del ciclo è data in figura 26; il segnale b0 nella prima fase comanda A, mentre nella settima fase aziona B; il segnale a0 nella terza fase comanda A, mentre nella quinta fase aziona B. Il metodo del contatore richiede un cablaggio particolare nei due casi di realizzazione pneumatica ed elettropneumatica; è invece di applicazione immediata, con la simulazione del contatore da parte del PLC. Tab. 1. Contatore Ingresso Riassetto C1 a0 C2 PR C2 b0 C2 PR a) Fig. 26. Essendo necessario il riassetto del sistema occorre prevedere un pulsante PR che riporta il comando nelle condizioni iniziali. Le equazioni booleane del ciclo sono: A PM a0 C1 A al B b0 C1 B b1 Nella prima e nella terza equazione troviamo rispettivamente a0 e b0 perché ricordiamo che come primi segnali si devono intendere quelli che si attivano dopo la partenza del ciclo, per cui il primo a0 è quello della terza fase mentre il primo b0 è quello della settima fase. Per ogni contatore occorre definire le condizioni di ingresso e di riassetto; nel nostro caso avremo quanto sintetizb) zato in tabella 1. Seguendo le equazioni logiche e la configurazione I/O della figura 27a si può disegnare il diagramma ladder della figura 27b. I due contatori sono preimpostati a 2 perché a0 e b0 comandano rispettivamente B e A alla loro seconda presenza. Fig. 27. a) Configurazione I/O; b) ladder. COMANDI PROGRAMMABILI (PLC) 211
Scaricare