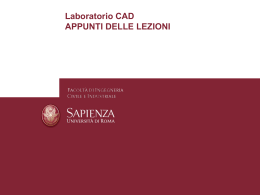
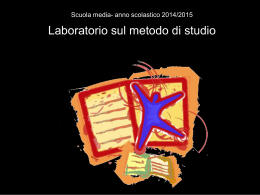
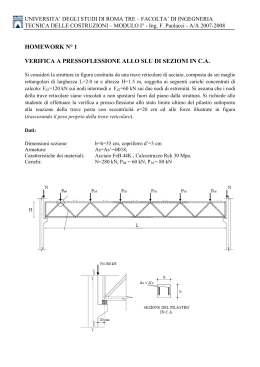
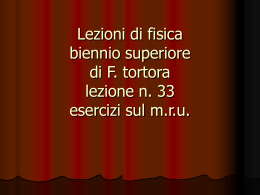
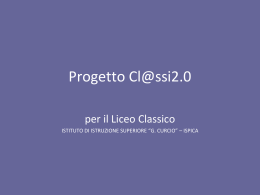
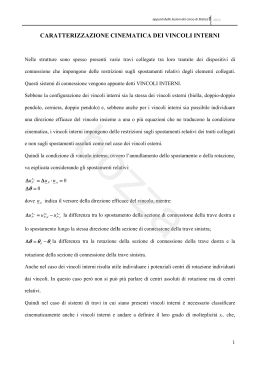
appunti delle lezioni del ccorso di Statica CARA ATTERIZ ZZAZION NE CINEM MATICA A DEI VIN NCOLI Lo studio ddella cinem matica della trave, e in ggenerale deei corpi rigid di, è stato eeffettuato co onsiderandoo la trave libbera di assuumere quallunque conffigurazionee nel piano dove avvieene il trasp porto. Nellaa realtà, la siicurezza deelle strutturee dipende an anche dal faatto che in esse e siano ppresenti dei dispositivi,, detti VINC COLI, in grado g di resstringere l’’insieme deelle configurazioni varriate e dei moti di unn corpo. In ppratica, in prresenza di vincoli v si poossono avere solo rototraslazioni ccongruenti. I vincoli sono collocaati sul contorno del coorpo (la frontiera) e, nel n caso dellla trave, esssi vengonoo consideratii applicati direttamente d e sui punti ddella linea d’asse. d In generalle, in un siistema costtituito da n t travi, i vincoli v possono esseree rappresen ntati sia daa dispositivi che colleggano una o più travi coon corpi essterni al sisttema, in quuesto caso prendono p ill nome di V VINCOLI ES STERNI, sia da dispos itivi che connettono traa loro varie travi apparrtenenti alloo stesso sisteema strutturrale, in quessto caso venngono detti VINCOLI V INTERNI. I Si pensi add esempio ad a un pontee costituito da un’unicca travata lee cui spallee sono costiituite da unn muro di soostegno di un u pendio: il muro di ssostegno raappresenta un u vincolo eesterno perr il ponte inn quanto l’effficacia del vincolo è fu unzione dell comportam mento di corrpi non appaartenenti al sistema. Sii pensi invecce allo stessso ponte in cui però la ttravata poggia su pile tramite t dei ccuscinetti di d neoprene:: in questo caso, il poonte visto nel n suo com mplesso trav vata-pile, è caratterizzzato dalla presenza p dii netti di neooprene, che collegano le pile allaa travata. Nello N stessoo vincoli intterni, appunnto i cuscin ponte, la foondazione delle d pile pu uò essere vissta invece come c un vin ncolo esternoo. Figura 1. Essempi di vinccoli esterni ed d interni in strutture reali 1 appunti delle lezioni del ccorso di Statica È importannte sottolineeare che meentre i vincooli esterni im mpongono delle d restrizzioni sugli spostamenti s i assoluti, i vincoli innterni impon ngono dellle restrizion ni sugli spostamenti rrelativi deii corpi chee collegano, come si veddrà in seguiito. Sia per i vvincoli esteerni che perr i vincoli iinterni è po ossibile intrrodurre le sseguenti prroprietà chee caratterizzaano le modaalità di esplicare le resttrizioni suglli spostamen nti da parte dei vincoli: - vinncoli lisci o privi di attrrito: quandoo gli spostam menti che no on sono imppediti dal viincolo sonoo totaalmente amm messi; - vinncoli perfettii: quando so ono totalmeente impeditti gli spostamenti non aammessi daal vincolo - vinncoli cedevooli: quando o sono parrzialmente impediti glli spostameenti non am mmessi dall vinncolo. Nel primo caso ad eseempio l’app poggio tra laa travata deel ponte e lee spalle è reealizzato co on un foglioo di neoprenne che connsente alla travata t di sscorrere lib beramente sulle s spallee. Nel caso o di vincolii perfetti, quuando ad esempio e le spalle del pponte non hanno cediimenti sottoo il peso della travataa impedendoo totalmentee ogni abbaassamento. Nel caso di d vincoli cedevoli, c lee spalle si comportano c o come una m molla, ovveero ammetto ono cedimennti non impedendo totaalmente gli aabbassamen nti. Nel seguitoo saranno presi p in esame solo vinncoli lisci e perfetti, ovvero dovee non entran no in giocoo effetti qualli l’attrito e dove il vincolo espliica la sua azione a impedendo totallmente lo sp postamentoo nei confronnti del qualee è efficace,, che dunquue risulta esssere nullo. Inoltre, poiché i vincooli sono app punto dispoositivi che esplicano e deelle restriziooni sulla cin nematica dii un corpo, uuna classificcazione più ù generale puuò essere efffettuata pro oprio in funnzione dellaa restrizionee impressa ddal vincolo sulla CON NFIGURAZIIONE o SU ULL’ATTO O DI MOTO O del punto o del corpoo dove il vinncolo è appliicato. Si possonoo cioè esamiinare le con ndizioni di vvincolo in fu unzione di: posizione, p vvelocità, tem mpo. - anolonnomo - unilaterale - mobile m - olonom mo - bilaterale - fisso f 2 appunti delle lezioni del ccorso di Statica Infatti un vvincolo vienne definito: anolonomoo: quandoo la restrizio one impostta dal vinco olo è funzio one sia dellla posizione che dellaa velocitàà olonomo: quandoo la restrizio one impostaa dal vincolo o è funzionee solo della posizione unilaterale: quandoo il vincolo impone i resttrizioni solo o lungo un verso v della ssua direzion ne efficace bilaterale: quandoo il vincolo impone i resttrizioni in entrambi i veersi della suua direzionee efficace mobile: quandoo le restrizio oni imposte dal vincolo o dipendono o dal tempo fisso: quandoo le restrizio oni imposte dal vincolo o sono indipendenti dal tempo Nello studdio della cinnematica delle travi inn presenza di vincoli, supporrem mo di considerare soloo vincoli OL LONOMI, BILATERA B LI, FISSI. Dalle definnizioni introodotte sopraa emerge coome l’efficaacia di un viincolo va essaminata co onsiderandoo la sua direezione efficace, ovvero o la direzionne lungo laa quale il viincolo espliica la restriizione suglii spostamentti. Nel caso sspecifico dii vincoli peerfetti, quessta restrizione si traduce in generrale nell’an nnullamentoo della proieezione delloo spostamen nto del puntto vincolato o P apparten nente alla liinea d’asse della travee lungo la diirezione effficace del vincolo. Com me si vedràà in dettaglio nel seguitto, alcuni vincoli v sonoo invece reallizzati tramiite dispositiivi in grado di impediree la rotazion ne rigida deella trave. Inoltre, see il vincoloo impone una u sola coondizione cinematica, ad esempioo impediscce solo unaa componentte del vetttore spostaamento, essso viene detto d VINC COLO SEM MPLICE (o o anche dii molteplicittà pari a 1).. Se invece al vincolo corrispondo ono due con ndizioni cinnematiche, ad esempioo l’annullam mento di enttrambe le co omponenti del vettore spostamento, oppure l’annullameento di unaa componentte del vetttore spostamento e ddella rotaziione della sezione, ill vincolo viene v dettoo VINCOLO O DOPPIO (o anche do otato di mollteplicità 2)). Infine, se al vincolo competono o condizionii cinematichhe sia sulle due comp ponenti del vettore spo ostamento sia s sulla rootazione dellla sezione,, ovvero il vvincolo bloccca i tre graadi di libertàà della travee, il vincolo o viene detto to VINCOL LO TRIPLO O (moltepliciità pari a tree). 3 appunti delle lezioni del ccorso di Statica VINCOLI E ESTERNI – CARATTERIZ C ZZAZIONE C CINEMATICA A VINCOLI SEMPLICI Tra i prinncipali vincoli esterni con moltepplicità parii a uno (deetti appuntoo vincoli semplici) s sii esaminanoo: il carrello, la biella, ill doppio-dooppio pendo olo. carrelllo: è un vinncolo che im mpedisce unnicamente gli g spostameenti del punnto dove è applicato a inn direzioone perpenddicolare al piano p di scoorrimento (d direzione effficace del vvincolo, iden ntificata nell seguitoo come nvi, dove il ped dice ‘v’ idenntifica che è relativa ad d un vincoloo, mentre ‘ii’ identificaa un vinncolo speciifico). Ad esso è dunnque associiata un’unicca equazionne che lo caratterizzaa cinematicamente (il motivo o per cui è un vincolo di molteplicità m uno) e ch he esprimee l’annuullamento deella compon nente dello spostamentto lungo la direzione d effficace: u Pnvi u P n vi 0 dove: s o del punto o P lungo laa direzione efficace del vincolo i-u Pnvi è la componeente dello spostamento esimo ne efficace ddel vincolo i-esimo n vi è iil versore deella direzion nto P su cui agisce il vin ncolo u P è llo spostamento del pun Ad eseempio, se laa direzione efficace dell carrello è parallela allla direzionee dell’asse y, y ovvero ill suo piiano di scoorrimento è parallelo all’asse z, l’equazion ne che caraatterizza la condizionee 2 cinematica del caarrello diven nta: u Pnvi u P e 0 . Allo A stesso modo, se iil piano di scorrimento s o del vinncolo è parrallelo all’aasse y, l’eqquazione ch he caratterizzza la conddizione cineematica dell carrelllo diventa: u Pnvi u P e3 0 . Se invece la direzione efficace e dell vincolo presenta p unn angoloo di inclinnazione rispetto alll’asse z, l’equazione che caratttterizza la condizionee cinematica del caarrello diven nta: u Pnvi u P2 sin u P3 cos 0 , essendo u P2P2 , u P3 le com mponenti dell vettoree spostamennto lungo glli assi di rife ferimento. 4 appunti delle lezioni del ccorso di Statica È altreesì interessaante osservaare che il caarrello non impedisce al corpo di ruotare. In particolaree esso fi fissa come centro c di ro otazione asssoluta qualu unque punto o apparteneente alla su ua direzionee * efficacce. In figuraa 2 è stato infatti i indiccato con u P lo spostam mento del puunto P cong gruente conn la pressenza del carrello. c Si vede v come il vettore che c descrive questo sppostamento sia proprioo ortogoonale a quallunque vettore che ha un estremo o in P e l’alltro estremoo (centro dii rotazione)) proprio sulla direzione efficaace del carreello, ovvero o è conform me a quanto emerge dall teorema dii de altresì chhe il corpo è libero dii ruotare atttorno a P in i quanto ill Chaslees. Dalla figura si ved vincollo non impoone alcuna condizione c ccinematica sulla rotazio one. Fiigura 2. carreello Bieella: è un vincolo seemplice moolto simile al carrello nel sensso che imp pedisce glii spoostamenti del d punto vincolato v luungo la dirrezione indiividuata daal suo asse (direzionee effiicace) menttre consente quelli lunngo la direzione perpeendicolare aal suo assee. Anche inn queesto caso sii ha un’uniica equazioone che esp prime la co ondizione ccinematica del d vincoloo (vinncolo di moolteplicità un no) che è laa stessa che caratterizzaa il carrello . Anche in questo q casoo valgono le stessse considerrazioni relattive al centrro di rotazio one. 5 appunti delle lezioni del ccorso di Statica F Figura 3. biella Dop ppio-doppiio pendolo:: è un vincoolo che, seb bbene sia caaratterizzatoo da molteplicità pari a unoo come il carrello c e laa biella, essso si differeenzia molto da questi iin quanto impone i unaa conndizione cinnematica sullla rotazionee e non sugli spostamenti (figura 44): 0 Gli spostamennti congruen nti con quessto vincolo sono dunqu ue delle trasslazioni rigiide, ovvero,, ma di Euleroo, il centro o di rotazion ne assolutaa che indiviidua questoo in aaccordo conn il teorem vincolo è una direzione d im mpropria. Figura 4. D Doppio-dopp pio pendolo 6 appunti delle lezioni del ccorso di Statica VINCOLI C CON MOLTEPLICITÀ DU UE (VINCOLII DOPPI) Tra i princcipali vincolli esterni co on moltepliccità pari a due d (vincoli doppi) si eesaminano: la cerniera,, il doppio ppendolo e il glifo. cerrniera: è unn vincolo ch he impediscce tutte le co omponenti di spostameento nel pun nto in cui è appplicato menntre consente solo la rootazione dell corpo. La condizionee cinematicaa si traducee in qquesto caso in due equaazioni: u P2 0 uP 0 3 uP 0 Queesto vincoloo fissa la po osizione dell punto e co onsente invece la rotazzione del co orpo (figuraa 5), quindi egli individua come c centroo di rotazio one proprio il punto doove è appliccato (centroo prooprio). Figgura 5. Cerniiera d possa essere bbanalmentee realizzatoo È iinteressantee osservaree come un vincolo doppio metttendo insieeme due vincoli sempplici, che neel caso dellla cerniera possono esssere o duee carrrelli o due bielle che insistono pproprio sul punto P, dove d le duue rette dellle direzionii effiicaci si interrsecano (fig gura 6). 7 appunti delle lezioni del ccorso di Statica Figura 6 ppio pendolo o glifo o: sono ancch’essi vinccoli di mollteplicità duue. Il dopp pio pendoloo Dop imppedisce siaa la rotazio one sia loo spostamen nto lungo l’asse dellle due bieelle che loo com mpongono. Il glifo im mpedisce lla rotazionee e gli spostamenti llungo il su uo asse dii scoorrimento. Perr entrambi, le l equazioni che caratteerizzano le condizioni cinematichee sono: u Pnvi u P n vi 0 0 Queesti vincoli consentono al corpo di traslare lungo la diirezione orttogonale all’asse dellee biellle (doppio pendolo) ov vvero paralllela al pian no di scorrim mento (glifoo). Ciò com mporta che ill cenntro di rotazzione è il punto p improoprio indiviiduato dall’’asse del viincolo (figu ura 7). Unaa diffferenza sosttanziale rispetto al car arrello in teermini di sp postamenti congruenti risiede nell fattto che il coorpo non pu uò ruotare: a spostam mento avven nuto la lineea d’asse deella trave è parrallela alla direzione d iniiziale, per qquesto il cen ntro di rotazzione non è un punto prroprio ma è il punto impropprio nella direzione d delll’asse dei pendoli. p 8 appunti delle lezioni del ccorso di Statica Figura 7. Doppio pend dolo e glifo VINCOLO C CON MOLTE EPLICITÀ TR RE (VINCOL LO TRIPLO):: INCASTRO O L’incastro è un vinccolo con molteplicità m tre, ovvero o ad esso corrispondo c ono tre equ uazioni chee esprimono le condiziioni cinematiche, chee impediscee tutte le componenti c i di spostam mento e laa rotazione ddel corpo: u P2 0 uP 0 3 uP 0 0 È evidentee come in prresenza di un u incastro iil corpo siaa fisso, ovveero non esisste alcuno sp postamentoo congruentee. Ciò com mporta che la presenzza di un in ncastro escllude l’esisttenza di un n centro dii rotazione. Quindi per il teorema di d Eulero l’iincastro ann nulla i tre grradi di liberrtà del corpo o rigido. Figgura 8. Incasstro Anche in questo casoo il vincolo o incastro ppuò essere visto comee formato dda tre vinco oli semplicii oppure da uun vincolo doppio e daa un vincoloo semplice. 9 appunti delle lezioni del ccorso di Statica EFFICACIA A DEI VINCO OLI Lo studio dell’efficaccia dei vinccoli nell’imppedire rotottraslazioni rigide r conggruenti dellaa trave è dii fondamenttale importaanza. Esso consiste c siaa nel valutarre se sono presenti p unn numero su ufficiente dii vincoli sem mplici (conddizione necessaria) sia nell’appuraare che i vin ncoli non siiano mal po osti, ovveroo nell’esaminnare la loro configurazzione. Per quantoo riguarda il i numero di d vincoli, è evidente che nel casso della travve, intesa come c unicoo corpo, ad essa comppetono tre gradi di llibertà indiividuati app punto dal vettore deii parametrii lagrangiani. Segue duunque che devono d esseere presentii almeno tree vincoli seemplici, ovv vero che laa sommatoriia del grado di moltepliicità dei vinncoli presenti sia non minore m di tree: s3 In figura 9 sono ripportati esem mpi di rotottraslazioni rigide congruenti nell caso in cui c non siaa soddisfattaa tale condizzione. F Figura 9. Mooti rigidi cong gruenti dovutti alla presenzza di un num mero insufficieente di vincolli Come si vvedrà nel seeguito, la presenza p di nt travi costituenti il sistema stru rutturale im mpone comee condizionee necessariaa s 3nt , esssendo ogni trave dotata di tre grad di di libertà.. Essendo apppunto una condizionee necessariaa, da sola non n basta a garantire cche non sian no possibilii rototraslazioni rigide congruenti c (alcuni ( esem mpi sono rip portati in fig gura 10). 100 appunti delle lezioni del ccorso di Statica Figura 10.. Inefficacia d dei vincoli dovuti alla conffigurazione Da ciò diiscende che per valu utare l’efficcacia dei vincoli v nell’impedire rototraslazzioni rigidee congruentii è necessaario esamin nare sia la molteplicità (numero di vincoli semplici) sia la loroo collocazionne/orientam mento. Ciò può p essere fa fatto sia per via diretta sia s da un puunto di vistaa analitico. CLASSIFIC CAZIONE CIN NEMATICA PER VIA DIR RETTA Si può sfruuttare il teoorema di Eu ulero, ovveero tenendo conto del fatto che see i vincoli consentonoo rototraslazioni rigide queste q possono essere vviste come rotazioni rigide attornoo al centro di d rotazionee d vincoli, le rototrasllazioni dev vono esseree assoluta. È importannte osservarre che, in presenza di congruentii con questti, ovvero come c dettoo sopra i vincoli v restrringono il campo delle possibilii configurazzioni variatee a solo qu uelle congruuenti. Quin ndi per indiividuare l’eeventuale prresenza dell centro di rootazione asssoluta è neccessario chee questo pun nto (proprio o o impropriio) sia comp patibile conn i vincoli prresenti. È evvidente che l’assenza ddel centro dii rotazione implica i l’effficacia dei vincoli. v Alcuni eseempi di esisstenza del centro c di rottazione in presenza p di un numeroo sufficientee di vincolii (s≥3) sono riportati inn figura 11. 11 appunti delle lezioni del ccorso di Statica Figura 11 Nel caso a. si osserva come, nono ostante sianno presenti tre t vincoli semplici, la lloro configu urazione dàà luogo ad uun centro di d rotazionee compatibiile con tuttii e tre, ovv vero individduato dall’intersezionee delle tre reette di azionne: i vincoli sono mal poosti e dunqu ue inefficacci. Nel caso bb. il centro di d rotazionee deve sia c oincidere con il punto di applicazzione della cerniera siaa lungo l’assse del carrelllo: esiste un n punto di iintersezionee che individ dua anche iin questo caaso il centroo di rotazionne. Anche nel caso c. è poossibile individuare unn centro di rotazione ch he risulta im mproprio: inffatti la rettaa d’azione deel carrello è parallela all’asse a del ddoppio pend dolo. Si può ò osservare che se il caarrello fossee stato verticcale non si sarebbe pottuto individduare un centro di rotaazione, ovveero i vincolli sarebberoo stati efficacci. A seconda dell’efficaccia dei vinccoli e del lorro numero, è possibile introdurre le seguenti definizionii che classifi ficano cinem maticamentee la trave: - Traave labile o cinematica amente indetterminata: quando q i vin ncoli non soono efficacii - Traave bloccatta cinematiicamente o cinematica amente isod determinataa: quando il grado dii moolteplicità deei vincoli prresenti s=3 e i vincoli sono s efficacci 122 appunti delle lezioni del ccorso di Statica - Traave bloccatta cinematiicamente o cinematiccamente ipeerdeterminaata: quando o i vincolii hannno quando il grado dii moltepliciità dei vincoli presentii s>3 e i vinncoli sono efficaci. Cii sonno però dei vincoli v sovrrabbondantii rispetto al numero strettamente nnecessario. Gli esempii di figura 11 rappresen ntano tutti ccasi di travee labile in cu ui i vincoli ssono mal po osti, mentree i casi di ffigura 9 raappresentan no comunquue casi di trave labile in cui pperò si ha un numeroo insufficiennte di vincolli ad imped dire rototrasslazioni rigide congruenti. Altri essempi sono riportati inn figura 12. Figura 12 CLASSIFIC CAZIONE CIN NEMATICA PER VIA AN NALITICA La classifiicazione cinnematica deella trave riigida o dei sistemi di travi rigide de può esserre condottaa altresì per vvia analiticaa. In particollare, come si vedrà in dettaglioo con riferimento all’eesercizio riiportato in seguito, lee equazioni che definisscono le n condizionii cinematich he dei vinccoli definisccono un siistema di n equazioni nnelle tre inccognite rapp presentate p roprio dai parametri p lagrangiani: V q0 dove la maatrice V vieene appunto o detta matriice dei vinccoli. Il sistema è omogeneeo è ha com me vettore ddelle incogn nite proprio il vettore ccontenente i parametrii lagrangiani della travee. È importannte definire i seguenti parametri: p 133 appunti delle lezioni del ccorso di Statica i s R (V ) grado di ridondanzaa cinematicaa l 3 R (V ) grado di labilità Si può dunnque utilizzaare il teorem ma di Rouchhé-Capelli che c consentee di individuuare i segueenti casi: s 3 R (V ) 3 la soluzzione del siistema V q 0 è indeterminata qquindi la traave è labile:: l 0 ovvero non tutti i vincoli soono efficacii; allo stesso tempo lla trave rissulta altresìì iperrdeterminatta i 0 , ov vvero alcunii dei vincoli posso esseere rimossi senza variaare il gradoo di llabilità della trave. i s R (V ) rrappresenta proprio il grado g di riddondanza ciinematica o di iperdeterm minazione. l 3nt R (V ) rappresenta invecce il grado do di labiliità, ovveroo inddividua il nuumero di parrametri caraatterizzanti il moto rigido della traave. o tutti efficaaci a soppriimere i grad di di libertàà s 3 R (V ) 3 in quessto caso i vvincoli sono della trave, ovvvero è una condizionee di blocco cinematico o: l 0 i 0 . Il sistem ma V q 0 amm mette comee unica solu uzione quellla banale e la trave si dice bloccaata cinematticamente o isoddeterminataa. no tre vinc oli semplicci sono effficaci, ovveero: l 0 ; allo stessoo s 3 R (V ) 3 : almen tem mpo è possiibile osserv vare che c’èè un numerro di vincolli sovrabbonndanti indiv viduato dall graado di ridonndanza cinem matica che risulta i 0 . Questi vincoli potreebbero esserre eliminatii e i rrestanti rim manere efficaaci a bloccaare il moto rigido r di rottotraslazionee. 144 appunti delle lezioni del ccorso di Statica Esercizio - 1 Con riferim mento alla trave riporrtata in figuura, verificaare che i vincoli sianoo efficaci ad a impediree rototraslazioni rigide congruenti. c Il vincolo iin A è una cerniera, du unque caratt tterizzato daa un grado di d moltepliccità pari a 2. 2 Il vincoloo in B è un ccarrello, ovvvero caratterrizzato da uun grado di molteplicità m à pari ad 1. Si osserva dunque chee la condizio one necessaaria relativaa al numero minimo di vvincoli da disporre d perr impedire roototraslaziooni rigide in un corpo è soddisfattaa: s≥3. Il passo successivo è proprio p quello di stabillire se i vinccoli siano effficaci. Le condizioni cinemattiche dei vin ncoli presennti sono le seguenti: s - cernniera in A: sono nulli tutti t gli sposstamenti del punto A, u A 0 chee si traduce nelle due condizioni c mento delle proiezioni dello sposttamento dell di annullam punnto A lungoo le direzion ni degli assi di riferimen nto: 3 uA e 0 2 uA e 0 - carrrello in B: è nullo lo spostamentto del punto o B lungo la l direzionee efficace del d carrello:: u B n 0 chee, nel caso in esame, coincide co on la direziione dell’assse y e quiindi l’unicaa conndizione impposta dal viincolo sempplice in B diiventa: 2 uB e 0 155 appunti delle lezioni del ccorso di Statica A questo ppunto bisoggna proprio esplicitare le condizioni impostee dai vincooli e vedere se ad essee corrispondde l’annullam mento dei parametri p laagrangiani, ovvero del vettore di rototraslaziione rigida.. In particolaare, per valuutare il vettore spostam mento del pu unto A e dell punto B, laa rototraslazione vienee riferita al ggenerico puunto Q della linea d’assse della trave posto proprio p nellla mezzeriaa, ovvero dii coordinate (L/2, 0). Il vettore con ntenente i paarametri lag grangiani saarà dunque: uQ2 q uQ3 Inoltre, com me espressiione per il calcolo c del vettore di spostamento si utilizzaa quella chee chiama inn gioco il proodotto vettooriale tra il vettore v di rootazione e ill vettore posizione: u A u Q e ( x A xQ ) 1 u B u Q e ( x B xQ ) 1 dove: 2 u Q uQ2 e uQ3 e 3 2 3 2 3 L L x A x Q xA2 xQ2 e x3A xQ3 e x B x Q xB2 xQ2 e xB3 xQ3 e L 3 e 2 L 3 e 2 E quindi: e1 x A x Q e1 e3 e 2 2 2 L e1 x B x Q e1 e3 e 2 2 2 L Le condizioni di vincoolo divengo ono: - punnto A: u A e uQ2 e uQ3 e e 3 2 3 3 L 2 3 e e 0 uQ3 0 2 166 appunti delle lezioni del ccorso di Statica 2 2 u A e uQ2 e uQ3 e e 2 - 2 3 L 2 2 L e e 0 uQ2 0 2 2 punnto B u B e uQ2 e uQ3 e e 2 2 3 L 2 2 L e e 0 uQ2 0 2 2 Esse possoono essere scritte in forma di sistem ma di equazzioni: 3 uQ 0 uQ2 0 L 2 3 uQ 0 q uQ 0 2 0 L 2 0 u Q 2 gruente sonno tutti nullli, ovvero i Si osservaa che i paraametri lagraangiani dellla rototraslaazione cong vincoli imppediscono qualunque q sp postamentoo dei punti della d trave nonché n la rootazione della sezione. L’efficaciaa dei vincolli può altressì essere apppurata andaando ad esaaminare il raango della matrice deii vincoli V dove: V q 0 . m dei vincoli risuulta: Nel caso inn esame la matrice 0 0 1 V 1 0 L / 2 1 0 L / 2 Essa presennta rango pari a 3, infaatti il suo deeterminante è diverso da d zero e paari a L. Vuol dire che ill sistema a cui essa è associata ammette a coome unica soluzione (i ( parametrii lagrangian ni appunto)) quella banaale. Inoltre essendo il ranggo della maatrice dei viincoli pari proprio p a 3, la trave riisulta cinem maticamentee isodeterminnata (isostaatica). 177 appunti delle lezioni del ccorso di Statica PARTE 2 Allo stessoo risultato si s può perveenire utilizzzando la rap ppresentazio one degli sppostamenti basata b sullaa matrice di rotazione: u A uQ W x A xQ u B uQ W x B xQ Dove: W W x x A xQ B xQ x3A xQ3 L 2 x2 x2 A Q 0 xB3 xQ3 L 2 2 2 x x B Q 0 e quindi: 2 L uQ L 2 3 u A uQ2 e uQ3 e uA 2 2 3 uQ 2 L uQ L 3 2 u B uQ2 e2 uQ3 e uB 2 3 uQ E quindi inntroducendoo le condizio oni cinemattiche dei vin ncoli: 3 u A e 0 uQ3 0 2 u A e 0 uQ2 L 0 2 L 2 u B e 0 uQ2 0 2 A cui corriisponde l’annnullamento o dei param metri lagrang giani e la steessa matricee dei vincolli dedotta inn precedenzaa. 188 appunti delle lezioni del ccorso di Statica PARTE 3 ondotto utiliizzando la rrappresentaazione deglii Infine lo sttudio dell’eefficacia deii vincoli puuò essere co spostamentti basato suulla matrice cinematica,, ovvero: u A D( x A , xQ )q u A D( x B , xQ )q Dove: 1 0 ( x 3A xQ3 ) 1 0 L / 2 D( x A , xQ ) 2 2 0 1 ( x A xQ ) 0 1 0 1 0 ( xB3 xQ3 ) 1 0 L / 2 D( x B , xQ ) 2 2 0 1 ( xB xQ ) 0 1 0 Da cui: 2 L uQ 2 uA 3 uQ 2 L uQ uB 2 3 uQ Che sono ggli stessi dedotti tramite le altre rap appresentaziioni. Ciò comporta chee si pervienee allo stessoo risultato inntroducendoo le condizio oni cinemati tiche di vinccolo. 199 appunti delle lezioni del ccorso di Statica Esercizio - 2 Con riferim mento alla trave riporrtata in figuura, verificaare che i vincoli sianoo efficaci ad a impediree rototraslazioni rigide congruenti. c Si riferiscaa la rototrasllazione all’o origine del ssistema di riferimento. r Il caso è lo stesso di prima solo o che stavollta i param metri lagrang giani sono rriferiti al pu unto A chee coincide apppunto con l’origine del d sistema ddi riferimen nto. Si potràà vedere chhe il calcolo o risulta piùù agevole. m i vetttori spostam mento dei punti p A e B,, Le condizioni cinemattiche di vincolo restanoo le stesse, mentre v chiaaramente caambiano: dove sono applicati i vincoli, u A u A e (xA x A ) u A 1 u B u A e ( x B x A ) u A L e 1 2 Introducenndo le condiizioni di vin ncolo si ottieene: 3 u A e 0 u 3A 0 2 u A e 0 u A2 0 u B e 0 u A2 L 0 0 2 Dove la maatrice dei viincoli risulta: 0 1 0 V 1 0 0 1 0 L Il cui deterrminante coontinua ad esssere diversso da zero, ovvero o pari a L. 200
Scaricare