Progettazione Assistita di Strutture Meccaniche
21/09/2012, pagina 1/6
Cognome:
Anno accademico in cui si è seguito il corso
Nome:
[2011/2012] [2010/2011] [2009/2010] [ . . . . . . . . ]
Matricola:
1. Impostazione di un semplice modello FEM
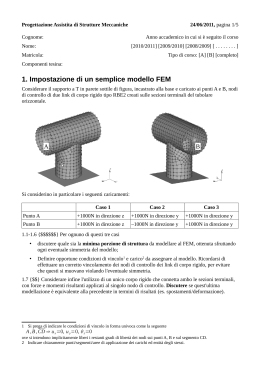
Sia data la flangia piana di supporto per motoriduttore in figura, ottenuta per tranciatura di lamiera
sottile. Considerato rigido il corpo del motoriduttore, e considerata una condizione di perfetta aderenza
nell'intorno delle viti di serraggio1, si è scelto di utilizzare un link di corpo rigido RBE2 che colleghi il
nodo A di riferimento alle superfici cilindriche dei fori della flangiatura centrale2. Allo stesso modo
sono da considerarsi incastrati i fori di fissaggio angolari.
A
Siano date le seguenti condizioni di caricamento:
Caso A {$$, p ___}
Caso B {$$, p ___}
Caso C {$$, p ___}
Coppia torcente di +1000Nm in
direzione z applicata al nodo A
Coppia flettente di +500Nm in
direzione y applicata al nodo A
Tiro assiale di +2000N in
direzione z, applicato al nodo A
Per ognuno di questi tre casi
• discutere quale sia la più efficiente modellazione FEM della struttura, ottenuta sfruttando
ogni eventuale simmetria3 del modello, ed eventuali modellazioni in teoria delle piastre o in
tensione/deformazione piana (considerare con particolare attenzione queste ultime...);
•
•
Definire opportune condizioni di vincolo e carico da assegnare al modello. Si richiede di
vincolare solamente i gradi di libertà nodali supportati dagli elementi utilizzati.
Compilare una tabella nella forma:
identificazione area vincolata o caricata
tipo di carico o vincolo
A, B, CD
u x=0, u y =0, z =0
E, F
Fx=100N
...
...
{++} Discutere le difficoltà di impostazione di una modellazione simmetrica attorno al piano
1 motoriduttore e viti non sono presenti come corpi deformabili nel presente modello; si trascurano inoltre le
deformazioni di schiacciamento locali della piastra dovute al serraggio;
2 a rigore la condizione di aderenza si avrebbe sulla superficie in contatto col motoriduttore in corrispondenza del
sottotesta delle viti, tuttavia si è ritenuta tale modellazione accettabile;
3 prestare particolare attenzione alla condizione di simmetria propria dei momenti; nel dubbio sostituire visualmente tali
momenti con un'equivalente coppia di forze e verificarne la simmetria.
Progettazione Assistita di Strutture Meccaniche
21/09/2012, pagina 2/6
medio di piastra (piano xy), e l'eventuale vantaggio computazionale che ne deriverebbe nei tre
casi proposti.
2. Assemblaggio e vincolamento di semplice struttura FEM
Considerare la struttura in figura (2d, plane strain)
composta dai seguenti elementi
elemento 1 (quad4)
connettività
(i,j,k,l) = (1,2,3,4)
matrice di
a11 ⋯ a18
rigidezza
⋮ ⋱ ⋮
elemento
a81 ⋯ a88
[
]
elemento 2 (tria3)
(i,j,k) = 1,4,5
b11 ⋯ b16
⋮ ⋱ ⋮
b61 ⋯ b66
[
]
Quesito 2.1: {$$$}{p____}
Si richiede di assemblare i contributi delle matrici di rigidezza degli elementi entro la matrice di
rigidezza globale, e di assemblare la pressione distribuita q entro il vettore dei carichi.
Matrice K, in forma bandata
b
F1x
F1y
F2x
F2y
F3x
F3y
F4x
F4y
F5x
F5y
Quesito 2.2: {$$$}{p____}
Supponendo che i vincoli in 1 e 2 impongano spostamenti y di entità δ1 e δ2 rispettivamente, mentre il
vincolo in 3 sia omogeneo, riportare la matrice di rigidezza e il termine noto come restituito dalle
procedure di vincolamento. Verificare la congruità delle unità di misura nei termini di b.
Progettazione Assistita di Strutture Meccaniche
Matrice K, in forma bandata
21/09/2012, pagina 3/6
b
F1x
F1y
F2x
F2y
F3x
F3y
F4x
F4y
F5x
F5y
Quesito 2.3: {$}{p____}
Nel caso specifico di δ1=δ2=0, disegnare una deformata qualitativa della struttura discretizzata di
figura.
3. Listato di programma al manipolatore algebrico
{$$$$}{p____} Impostare al manipolatore algebrico la procedura di
soluzione del problema di figura, secondo i seguenti step:
•
definire le espressioni U1, U2 ed U3 come energia potenziale
elastica delle tre molle nei parametri rigidezza k1,k2,k3 e nei
parametri spostamento x,y;
•
definire la variazione di energia potenziale della forza UP come prodotto tra forza P e spostamento (negativo se
equiverso) del suo punto di applicazione;
•
definire l'espressione energia potenziale totale U come somma
delle precedenti;
•
trovare la configurazione di spostamento che minimizza l'energia potenziale totale impostando
∂U
∂U
=0,
=0 , e risolvendolo nelle variabili x,y;
un sistema di due equazioni
∂x
∂y
•
ricavata la coppia x,y di soluzione, sostiture tali valori entro l'espressione
[P1=k1*x, P2=k2*(x+y)/2,P3=k3*y]
al fine di ottenere le quote di carico passanti per ognuna delle tre molle.
4. Teoria degli Elementi Finiti
4.1
{$$$}{p____} Formulazione dell'elemento triangolare tria3
•
Esprimere in forma generica le funzioni di interpolazione per gli spostamenti u(x,y) e v(x,y)
per l'elemento triangolare tria3;
•
Definire la procedura per ricavare i coefficienti αi delle funzioni di interpolazione in funzione
degli spostamenti nodali;
•
Ricavare le componenti di deformazione
ϵx , ϵy , γ xy a partire dalla formulazione agli
Progettazione Assistita di Strutture Meccaniche
21/09/2012, pagina 4/6
spostamenti;
σz ,ϵz entro l'elemento tria3 in ambo i casi di tensione e
•
discutere l'andamento delle quantità
deformazione piana;
•
Discutere (motivando) la variazione dei termini della matrice di rigidezza dell'elemento finito
tria3 in funzione
◦ della scala dimensionale dell'elemento;
◦ del modulo di Young del materiale.
4.2
{$$$$}{p____} Considerare un elemento isoparametrico 4 nodi nel quale la mappatura delle
3
1
coordinate indeformate (ξ,η)->(x,y) è nella forma x=ξ+2 , y = η+ ξ η+2 , mentre gli
2
2
1
1
spostamenti u(ξ,η),v(ξ,η) sono nella forma u= (−ξ+ η−ξ η+13) , v= (−ξ+ η−ξ η+5) .
4
4
•
Disegnare tale elemento entro un sistema di assi xy quotato4 sia in stato indeformato che
deformato.
•
Calcolare le componenti di deformazione ϵx , ϵy , γ xy
al centroide dell'elemento (ξ,η)=(0,0).
5. Dinamica delle strutture
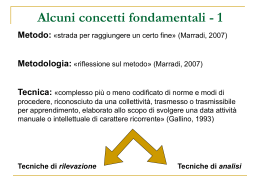
{$$$+}{p____} Considerare il sistema dinamico di figura a pag. 6, eccitato da una pulsazione della
pressione interna (caricamento simmetrico in x,y) e con risposta campionata in termini di spostamento
differenziale in direzione x (=allontanamento) dei nodi centrali delle estremità dei bracci.
Disegnare per i due casi di smorzamento nullo e lieve smorzamento (subcritico per ogni modo
proprio) grafici di risposta in frequenza sul range 10-3000 Hz, quantitativi in frequenza ma solo
qualitativi in ampiezza. Sottolineare in particolare le differenze tra le due modellazioni, ed il legame
tra picchi di risposta, frequenze dei modi propri e forma simmetrica o asimmetrica degli stessi.
6'. Servo link
[corso secondo a.a. 2011-2012]
{$$$}{p____} Sia data una struttura elastica discretizzata ad n gradi di libertà, descritto mediante una
matrice di rigidezza K ed un vettore dei carichi F, entrambi assemblati ma non modificati da procedure
di vincolamento.
Descrivere le operazioni necessarie per imporre entro il processo di soluzione la condizione di
dipendenza lineare δi =∑i≠ j aij δ j dell'i-esimo g.d.l. δi dai restanti δj , j≠i gg.d.l. (servo link).
6''. Programma ad elementi finiti autocostruito
[corso secondo a.a. precedenti al 2011-2012]
{$$$}{p____} Associare ad ogni subroutine del programma ad elementi finiti autocostruito gli input
richiesti. Completare la seguente tabella tenendo conto che a sinistra sono elencate alcune subroutine
presenti nel codice agli elementi finiti autoprodotto, e in alto sono elencati alcuni dati (scalari, matrici
e vettori) utilizzati nel programma.
Si chiede in particolare di completare la tabella a doppia entrata specificando per ogni subroutine i dati
di Input (I), di Ouput (O) o dati che vengono modificati dalla procedura (M).
4 si consiglia di usare foglio quadrettato e indicazione di scala, tipo 1 unità = 4 quadretti...
Dati input su forze
Dati input sui vincoli
Vettore IPOINT
Vettore spostamenti nodali
Vettore termini noti
Matrice rigidezza struttura
Matrice rigidezza elemento
Numerazione elementi e nodi
21/09/2012, pagina 5/6
Area elemento
Coordinate nodali
Numero elementi
Numero nodi
Progettazione Assistita di Strutture Meccaniche
Solutore Gaussiano
Area elemento
Creazione matrice D
Creazione matrice B
Calcolo matrice rigidezza di un
elemento
Creazione vettore puntatori per
associazione gradi di libertà di
elemento e di struttura
(POINTVT)
Creazione vettore termini noti
Vincolamento
Assemblaggio
Calcolo tensioni
7. Fortran 77 – Continuazione esercizio “6' - Servo link”
[corso secondo a.a. precedenti al 2011-2012: chiedere lo schema di riempimento della matrice]
{$$$} {p____} Scrivere una subroutine fortran 77 BUILDLMAT(N,I,RA,RL) che preso in input il
numero di gradi di libertà del sistema N, l'indice del grado di libertà da rendere dipendente I, un vettore
RA contenente gli N coefficienti RA(J)= aij della combinazione lineare5, restituisca la matrice di
trasformazione RL con schema secondo teoria del servo link6.
5 supporre il termine RA(I), non utilizzato dalla teoria, inizializzato a valore nullo.
T
T
6 sarebbe la matrice L tale per cui [δ 1 …δ i …δ N ] = L⋅[δ1 … Δδ i … δN ] , "R" è un prefisso incluso al fine di
definirla reale per via implicita.
Progettazione Assistita di Strutture Meccaniche
21/09/2012, pagina 6/6
Note di compilazione:
•
il peso relativo di ogni domanda è espresso – in forma indicativa e non vincolante – in punti
{$} per quota “base” e punti {+} per quota extra 30/30 (“lode”).
•
Per facilitare la correzione si richiede di numerare le facciate dei fogli protocollo (1-4 primo
foglio, 5-8 secondo foglio...) e di indicare sulla traccia, entro i riquadri {p____} a lato di ogni
domanda, dove trovarne lo svolgimento.
Barrare se svolto sui fogli di traccia, lasciare vuoto per esercizi non svolti.
•
L'esito dello scritto verrà pubblicato entro la sessione di verbalizzazione, e sarà registrabile
entro 12 mesi dalla data dello stesso.
•
La consegna di uno scritto invaliderà gli esiti (non verbalizzati...) ottenuti in appelli precedenti.
È comunque possibile presentarsi all'appello, svolgere il compito e non consegnare.
Figura per esercizio 5
Struttura a U "tipo diapason"
cava, in parete sottile, libera
nello spazio e caricata per
pressurizzazione interna.
I° modo: apertura
434Hz, symm x+y
II° modo: controrotazione bracci
1281Hz, asymm x+y
III° modo: scorrimento
1704 Hz, symm y, asymm x
IV° modo: polmonamento
sincrono, 2433 Hz, symm x+y
V° modo: polmonamento
VI° modo, controrotazione
asincrono,
torsionale bracci,
2452Hx, symm y, asymm x
2755Hz, symm x, asymm y
symm x = deformazione simmetrica rispetto a piano normale a x
asymm x = deformazione antisimmetria rispetto a piano normale a x
VII° modo: pareti oscillanti
esterno-interno,
3133Hz, symm x+y
Scaricare