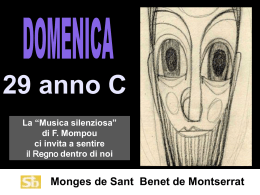
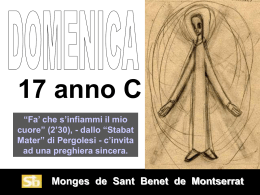
1 CALCOLO DIFFERENZIALE FUNZIONI DI PIÙ VARIABILI E FUNZIONI VETTORIALI Domini e disequazioni in tre variabili. Derivate parziali prime e gradiente. Matrice jacobiana e regola della catena. Nota. Qui non vengono trattati i casi delle funzioni scalari di due variabili e vettoriali di una variabile (curve), per i quali si rimanda ai documenti appositi. Esercizio 1 Descrivere il dominio della funzione f , nei seguenti casi: s r x2 + y 2 − 1 2x − x2 − y 2 − z 2 1) f (x, y, z) = 2) f (x, y, z) = z+1 x2 + y 2 + z 2 − x Esercizio 2 Calcolare il gradiente della funzione f , nei seguenti casi: 1) f (x, y, z) = x sin (z(y − 1)) 2) f (x, y, z) = log(xyz ) 3) f (x1 , x2 , x3 , x4 ) = x1 x4 4) f (x1 , x2 , x3 , x4 ) = ex1 +x2 +x3 +x4 Esercizio 3 Siano f : R2 → R3 e g : R3 → R le due funzioni definite da f (u, v) = (u2 , uv, v 2 ) e g(x, y, z) = x2 + yz. Verificare la formula che fornisce la matrice jacobiana di g ◦ f , ossia Jg◦f (u, v) = Jg (f (u, v)) · Jf (u, v). CALCOLO DIFFERENZIALE - Funzioni di più variabili e funzioni vettoriali 2 SVOLGIMENTI q 2 2 −1 Esercizio 1 1) La funzione f (x, y, z) = x +y è definita nei punti (x, y, z) che risolvono z+1 la disequazione x2 + y 2 − 1 ≥ 0, z+1 ossia nell’unione dei due insiemi A1 = (x, y, z) ∈ R3 : x2 + y 2 ≥ 1, z > −1 , A2 = (x, y, z) ∈ R3 : x2 + y 2 ≤ 1, z < −1 . A1 è l’insieme dei punti del semispazio aperto z > −1 che si trovano “al di fuori” del cilindro x2 + y 2 = 1 (cilindro parallelo all’asse z che taglia il piano xy nella circonferenza x2 + y 2 − 1 = z = 0 di centro (0, 0, 0) e raggio 1), cilindro compreso. A2 è l’insieme dei punti del semispazio aperto z < −1 che si trovano “al di dentro” del cilindro x2 + y 2 = 1, cilindro compreso. L’unione dom f = A1 ∪ A2 è rappresentata in Fig. 1. 2) La funzione f (x, y, z) = disequazione q 2x−x2 −y 2 −z 2 x2 +y 2 +z 2 −x è definita nei punti (x, y, z) di R3 che risolvono la 2x − x2 − y 2 − z 2 ≥ 0. x2 + y 2 + z 2 − x Studiamo separatemente numeratore e denominatore, per poi usare la regola dei segni. Il numeratore è la funzione f1 (x, y, z) = 2x − x2 − y 2 − z 2 , che si annulla nei punti in cui 2x − x2 − y 2 − z 2 = 0, cioè nei punti della sfera S1 : x2 + y 2 + z 2 − 2x = 0, la quale ha centro (1, 0, 0) e raggio 1. Nei punti interni alla sfera risulta f1 (x, y, z) > 0 (si faccia ad esempio il test con le coordinate del centro), mentre nei punti esterni risulta f1 (x, y, z) < 0. Il denominatore è la funzione f2 (x, y, z) = x2 + y 2 + z 2 − x, che si annulla nei punti della sfera S2 : x2 + y 2 + z 2 − x = 0 la quale ha centro ( 21 , 0, 0) e raggio 12 . Nei punti interni alla sfera S2 risulta f2 (x, y, z) < 0, mentre nei punti esterni risulta f2 (x, y, z) > 0. La sfera S2 è tangente internamente ad S1 (nell’origine), per cui R3 privato delle due sfere rimane suddiviso in tre regioni aperte: A1 formata dai punti interni ad S2 , A2 formata dai punti compresi tra le due sfere (sfere escluse) ed A3 formata dai punti esterni ad S1 . In A2 , le due funzioni f1 , f2 sono dello stesso segno e quindi il loro rapporto è positivo, mentre in A1 e in A3 le due funzioni sono di segno opposto e quindi il loro rapporto è negativo. Dunque dom f = A2 ∪ (S1 \ (0, 0, 0)) (dove i punti di S1 diversi da (0, 0, 0) vanno aggiunti perché non fanno parte di A2 ma sono accettabili, in quanto annullano il numeratore e 3 CALCOLO DIFFERENZIALE - Funzioni di più variabili e funzioni vettoriali Figura 1 Figura 2 non li denominatore). In Fig. 2, per chiarezza, sono rappresentati solo i punti di dom f con z ≤ 0. Esercizio 2 Osserviamo che, per i teoremi sulle operazioni tra funzioni derivabili parzialmente, tutte le funzioni considerate ammettono gradiente in ogni punto del loro dominio; pertanto non dovremo affrontare alcuna questione di esistenza delle derivate parziali e si tratterà solo di eseguirne il calcolo. 1) Poiché tutte le operazioni svolte da f sono definite per ogni valore del loro argomento, risulta dom f = R3 . In ogni punto (x, y, z) di R3 si ha ∂f ∂ = sin (zy − z) (x) = sin (zy − z) , ∂x ∂x ∂f ∂ ∂ = x (sin (zy − z)) = x cos (zy − z) (zy − z) = xz cos (zy − z) , ∂y ∂y ∂y ∂f ∂ ∂ = x (sin (zy − z)) = x cos (zy − z) (zy − z) = x(y − 1) cos (zy − z) . ∂z ∂z ∂z Dunque ∇f = (sin (zy − z) , xz cos (zy − z) , x(y − 1) cos (zy − z)). 2) Si ha dom f = (x, y, z) ∈ R3 : x > 0 (aperto) e per ogni (x, y) ∈ dom f risulta f (x, y, z) = yz log x. Allora ∂f yz ∂f ∂f = , = z log x, = y log x ∂x x ∂y ∂z e quindi ∇f = yz x , z log x, y log x . 3) Per ogni (x1 , x2 , x3 , x4 ) ∈ dom f = R4 , si ha ∇f = (x4 , 0, 0, x1 ). 4) Per ogni (x1 , x2 , x3 , x4 ) ∈ dom f = R4 , si ha ∇f = ex1 +x2 +x3 +x4 (1, 1, 1, 1). CALCOLO DIFFERENZIALE - Funzioni di più variabili e funzioni vettoriali 4 Esercizio 3 La matrice jacobiana di f è 2u 0 Jf (u, v) = v u , 0 2v mentre la matrice jacobiana di g, che ha valori reali, è il suo gradiente ∇g (x, y, z) = (2x, z, y). Dunque risulta Jg (f (u, v)) = ∇g (f (u, v)) = ∇g u2 , uv, v 2 = (2u2 , v 2 , uv) e pertanto il prodotto righe per colonne di Jg (f (u, v)) e Jf (u, v) è 2u 0 Jg (f (u, v)) · Jf (u, v) = (2u2 , v 2 , uv) v u = (4u3 + v 3 , 3uv 2 ). 0 2v D’altra parte, la funzione composta g ◦ f ha valori reali ed è data da (g ◦ f )(u, v) = (u2 )2 + (uv)(v 2 ) = u4 + uv 3 , per cui la sua matrice jacobiana è Jg◦f (u, v) = ∇(g ◦ f )(u, v) = (4u3 + v 3 , 3uv 2 ). Ciò conferma la regola della catena, cioè la regola di moltiplicazione delle matrici jacobiane per la composizione di funzioni.
Scaricare