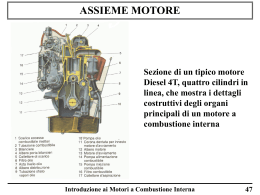
I Motori Brushless A differenza dei motori a spazzole (brushed motor), i motori brushless (senza spazzole) hanno tre caratteristiche fondamentali: sono affidabili e duraturi nel tempo, garantiscono molta coppia, riescono a cambiare velocità di rotazione in maniera rapidissima. La differenza fondamentale tra le due tipologie di motori è l'alimentazione degli stessi. Nei motori brushed o a spazzole è sufficiente utilizzare 2 poli di alimentazione (negativo e positivo) dove aumentando e diminuendo il voltaggio, aumento e diminuisco la rotazione del motore. Nei motori brushless il procedimento di alimentazione per far ruotare la cassa con i magneti è più complesso poiché si utilizzano 3 fasi. Queste fasi portando una differenza di potenziale fanno si che la cassa possa ruotare. Per gestire questa differenza di potenziale c'è bisogno quindi di un processore, che regoli la potenza da erogare su ogni singola fase. Questo processore è detto ESC o Electronic Speed Controller, non necessario nei motori a spazzole. Un altro vantaggio rispetto ai motori brushed è l'assenza di attrito o resistenza meccanica che evita il surriscaldamento eccessivo del motore e le scintille all'aumentare della velocità di rotazione. In questo modo si evitano anche disturbi elettromagnetici che comportano seri problemi all'elettronica del drone multi-rotore. I brushless tra l'altro non hanno bisogno di manutenzione, ma di un controllo saltuario dei cuscinetti. La coppia in fine è la caratteristica più importante, infatti questa tecnologia ci consente di avere delle rotazioni di motore relativamente lente ma con molta coppia senza il bisogno di usare un riduttore a ingranaggi. Come leggere un Motore Brushless Ogni motore brushless ha delle specifiche stampate sulla cassa. I parametri che potete trovare sono i KV e dei numeri riferiti al modello del motore. Tali numeri mi informano della dimensione del motore, ovvero il diametro e la lunghezza dello statore (dove vengono avvolte le bobbine). Il parametro KV indica quanti giri può fare il motore senza elica per ogni volt al minuto. Nel caso dell'immagine superiore quindi, se l'alimentazione del motore è di 11,1V il numero totale di giri a vuoto (senza elica) di questo particolare motore sarà di 6660 giri al minuto. Maggiore sono i giri al minuto maggiore sarà il consumo di corrente. E' quindi consigliabile usare motori con KV basso (intorno ai 360 o 530) per poter gestire meglio la durata in volo del multirotore. Questo comporta però un'elica piu grande rispetto al peso del drone che andremo a costruire. Ogni produttore rilascia anche una tabella comparativa di test effettuati su ogni motore che ci consente di conoscere le specifiche dettagliate per peso e trazione con diverse configurazioni. Sempre prendendo come esempio il motore MT4008-12 della TigerMotor abbiamo in tabella le specifiche necessarie per costruire un drone multi-rotore al meglio dell'efficienza di carico. In questa tabella abbiamo: • Volts; 14,8 quindi una batteria a 4 celle • Prop: il tipo di elica usato • Throttle: la percentuale di GAS dello stick del radiocomando • Amps: gli ampere consumati • Watts: la potenza erogata • Thrust: la trazione in grammi • RPM: giri al minuto • Efficiency: il grado di efficienza • Temperature: la temperatura raggiunta Viene da se, leggendo questa tabella, che questo motore raggiunge la massima efficienza con una batteria a 4 celle, un'elica 13x4.4, poicè al 50% di throttle l'efficienza ottenuta è la massima degli altri test ovvero di 10.44, sempre se la configurazione del mio drone multi-rotore non supera i 510x4 quindi i 2.4kg di peso (se usassi 4 motori) con tutti i componenti, perché al 50% di throttle il thrust in grammi è di 510 grammi che moltiplicato per il numero di motori (sempre ipotizzando un quad-rotor) mi da 2.4kg.
Scaricare