6
Statica delle travi
6
Statica delle travi
6.1
Forze esterne
Si consideri un generico corpo tridimensionale.
possono agire i seguenti tipi di forze esterne:
Si ricorda che su di esso
• forze di volume b = b(x): B ! x "−→ V; dimensionalmente si ha
[b] = [F L−3 ];
• forze di superficie s = s(x): ∂B ! x ∈"−→ V; dimensionalmente si ha
[s] = [F L−2 ].
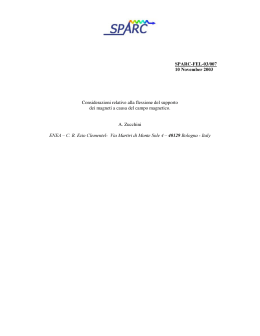
Si consideri ora una trave (figura 6.1). Nell’ambito della teoria monodimensionale in oggetto si effettua una riduzione statica all’asse della trave. In
altri termini (figura 6.3) si vuole determinare un sistema di forze definite sull’asse della trave tale che prese due sezioni generiche i sistemi di forze definiti
sul corpo tridimensionale e sull’asse della trave siano equivalenti. Riducendo
il sistema di forze agenti sulla sezione trasversale al baricentro della sezione
stessa sezione per sezione, si ottengono i seguenti campi di forze:
!
"
b
f = f (s)
[f ] = [F L−1 ]
=⇒
s
c = c(s)
[c] = [F ]
ove s è la coordinata curvilinea individuata sull’asse della trave, f (s) è c(s)
sono rispettivamente un campo di forze distribuite e un campo di coppie
distribuite per unità di lunghezza.
Nel modello di trave considereremo quindi una descrizione monodimensionale del sistema di forze esterne considerando una riduzione statica di esso ai
punti della linea d’asse, ottenendo forze e coppie distribuite f = f (s), c = c(s)
(figura 6.2). Inoltre, per descrivere distribuzioni di forze e coppie agenti su
porzioni molto piccole della trave, considereremo anche la presenza di forze e
coppie concentrate in un numero finito di sezioni (Gi , Fi ), (Gj , Cj ). In figura
6.3 si riportano alcuni esempi.
6.2
Forze interne
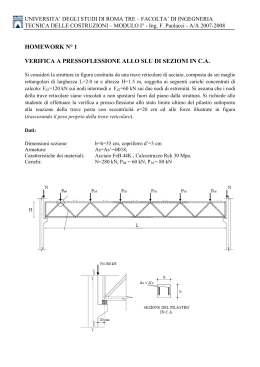
Immaginiamo di separare la trave in corrispondenza della sezione di#baricentro G(s) nelle due parti che indicheremo con L − e L + , con L − L + =
Corso di Scienza delle Costruzioni
84
A. A. 2009-2010
6
Statica delle travi
6.2
Forze interne
6
Statica delle travi
6.2
Forze interne
Fig. 6.1
Fig. 6.2
Fig. 6.3
$
L , L − L + = ∅. Nel modello di trave si assume che le due parti si
scambino delle azioni di contatto cosı̀ fatte (figura 6.4):
• L + esercita su L − un sistema di forze interne la cui riduzione statica
al baricentro G(s) della sezione in esame è data dalla forza (G(s), R) e
dal momento M;
• analogamente L − esercita su L + un sistema di forze interne equivalente
alla forza (G(s), R" ) ed alla coppia di momento M" .
Queste azioni rappresentano globalmente l’azione reciproca tra L + e L −
attraverso la sezione. Il sistema di forze interne per una trave è noto quando
si conoscono sezione per sezione le grandezze R, R" , M, M" , ovvero se sono
Corso di Scienza delle Costruzioni
85
A. A. 2009-2010
Fig. 6.4
Corso di Scienza delle Costruzioni
86
A. A. 2009-2010
6
Statica delle travi
6.3
Equilibrio della trave
note le funzioni
Equilibrio della trave
Consideriamo una trave soggetta ad un sistema di forze esterne
{ f,
c,
(Gi , Fi ),
R" ,
M,
M" } .
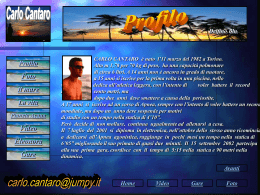
Fissiamo sull’asse della trave un’ascissa curvilinea s ∈ (0, L) e consideriamo
una generica parte della trave compresa tra le sezioni di ascisse s1 e s2 (figura
6.5).
Fig. 6.5
Indichiamo con re (s1 , s2 ) e meO (s1 , s2 ) rispettivamente la risultante ed il
momento risultante (rispetto ad un fissato polo O) di tutte le forze esterne
agenti sul tratto di trave. La risultante ed il momento risultante di tutte le
forze (esterne ed interne) agenti sul tratto considerato risultano pari a:
"
r(s1 , s2 ) = re (s1 , s2 ) + R(s2 ) + R" (s1 )
mO (s1 , s2 ) = meO (s1 , s2 ) + (G(s2 ) − O) × R(s2 )+
+(G(s1 ) − O) × R" (s1 ) + M(s2 ) + M" (s1 )
Corso di Scienza delle Costruzioni
87
6.3
Equilibrio della trave
per ogni s1 , s2 ∈ (0, L) .
(Gj , Cj ) }
e ad un sistema di forze interne
{ R,
Statica delle travi
Assiomi di Eulero: la trave è in equilibrio sotto il sistema di forze
(interne ed esterne) considerato se e solo se
"
r(s1 , s2 ) = re (s1 , s2 ) + R(s2 ) + R" (s1 ) = 0
mO (s1 , s2 ) = meO (s1 , s2 ) + (G(s2 ) − O) × R(s2 )+
(6.1)
+(G(s1 ) − O) × R" (s1 ) + M(s2 ) + M" (s1 ) = 0
s ∈ (0, L) "→ R(s), R" (s), M(s), M" (s) .
6.3
6
A. A. 2009-2010
Si osservi che se si sceglie s1 = 0 e s2 = L, le equazioni (6.1) assumono la
forma
" e
r (0, L) = 0
meO (0, L) = 0
e dunque rappresentano le equazioni cardinali della statica per la trave; si
osservi che nel caso in esame esse sono necessarie ma non sufficienti per
l’equilibrio.
Dividiamo ora la trave nelle due parti L + e L − separate dalla sezione
G(s) (figura 6.4). Applicando gli assiomi di Eulero prima alla parte L − e
poi alla parte L + e calcolando i momenti rispetto al polo G(s), si ottiene
rispettivamente:
"
r(0, s) = re (0, s) + R(s) = 0
mG(s) (0, s) = meG(s) (0, s) + M(s) = 0
"
r(s, L) = re (s, L) + R" (s) = 0
mG(s) (s, L) = meG(s) (s, L) + M" (s) = 0 .
⇒
"
Osserviamo inoltre che, per l’equilibrio dell’intera trave si ha
"
r(0, L) = re (0, s) + re (s, L) = 0
mG(s) (0, L) = meG(s) (0, s) + meG(s) (s, L) = 0
re (0, s) = −re (s, L)
meG(s) (0, s) = −meG(s) (s, L) ,
pertanto risulta:
"
R(s) = −re (0, s) = re (s, L) = −R" (s)
M(s) = −meG(s) (0, s) = meG(s) (s, L) = −M" (s) .
Corso di Scienza delle Costruzioni
88
A. A. 2009-2010
6
Statica delle travi
6.4
Caratteristiche della sollecitazione
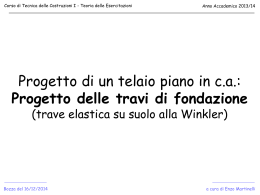
Dunque i due tronchi L + e L − si scambiano azioni opposte (figura 6.6).
Inoltre R ed M, azioni di L + su L − , coincidono rispettivamente con la
risultante e il momento risultante rispetto al polo G(s) delle forze esterne
agenti su L + ; ovvero R" ed M" , azioni di L − su L + , coincidono con la
risultante ed il momento risultante rispetto al polo G(s) delle forze esterne
agenti su L − .
6
Statica delle travi
6.5
Vincoli
Nel caso di travi piane (si veda il paragrafo 4.5) il sistema di forze esterne
f , Fi è costituito da forze parallele al piano che contiene la linea d’asse della
trave; inoltre c è un campo vettoriale perpendicolare a tale piano cosı̀ come il
vettore momento Cj della generica coppia concentrata. È dunque conveniente
in questo caso assumere il sistema di riferimento locale (G; x, y, z) in maniera
tale che l’asse x sia diretto perpendicolarmente al piano contenente la linea
d’asse. Per tale scelta si ha che le seguenti componenti delle azioni interne
sono nulle:
Rx = 0,
Mz = My = 0 .
È quindi possibile utilizzare la notazione semplificata (figura 6.7):
componente
Ry
Rz
Mx
Fig. 6.6
6.4
simbolo
T
N
M
denominazione
sforzo di taglio
sforzo normale
momento flettente
Caratteristiche della sollecitazione
Per caratterizzare le azioni interne nelle travi, è utile riferirsi alle componenti
di R ed M in un opportuno sistema di riferimento. Sia (G; x, y, z) un sistema
di riferimento cartesiano ortogonale con asse z tangente alla linea d’asse della
trave in G e diretto nel verso delle ascisse curvilinee crescenti (cioè uscente
da L − ) e gli assi x e y perpendicolari a z e diretti in maniera arbitraria
(figura 6.7). Le componenti di R ed M nel riferimento scelto sono per definizione le caratteristiche della sollecitazione in G. Per esse si usa la seguente
terminologia:
componente
Rx
Ry
Rz
Mx
My
Mz
Corso di Scienza delle Costruzioni
simbolo
Tx
Ty
N
Mx
My
Mz
denominazione
sforzo di taglio (lungo x)
sforzo di taglio (lungo y)
sforzo normale
momento flettente (lungo x)
momento flettente (lungo y)
momento torcente
89
Fig. 6.7
Le caratteristiche della sollecitazione cosı̀ definite si intendono positive se
dirette nel senso positivo degli assi x, y e z. Poiché le forze interne agenti
su L + sono opposte a quelle agenti su L − nella stessa sezione, quando le
caratteristiche della sollecitazione agiscono sulla base di sinistra dell’elemento
di trave considerato, si intendono positive se dirette in verso opposto a quello
degli assi x, y e z (figura 6.8).
6.5
Vincoli
Nella nostra trattazione ipotizzeremo la presenza di vincoli lisci, in grado
di reagire sulla trave con forze e coppie concentrate agenti sulla sezione di
applicazione del vincolo. Per questa tipologia di vincoli è possibile ricavare la
A. A. 2009-2010
Corso di Scienza delle Costruzioni
90
A. A. 2009-2010
6
Statica delle travi
6.5
Vincoli
6
Statica delle travi
caratterizzazione statica a partire da quella cinematica attraverso il seguente
postulato.
Postulato delle reazioni vincolari. Un vincolo liscio è in grado di
reagire con un qualsiasi sistema di forze che non compiono lavoro per tutti gli
spostamenti compatibili con il vincolo stesso:
per ogniu(A), ϕ(A) compatibili con il vincolo.
Si analizzano nel seguito le possibili reazioni esercitate dai vincoli piani.
con HA e VA arbitrari parametri reattivi. Si osservi che il numero di parametri
reattivi è uguale alla molteplicità cinematica del vincolo (questa proprietà è
valida per tutte le tipologie di vincolo).
Doppio pendolo (figura 6.10a)
Le equazioni cinematiche di vincolo sono
"
u(A) · e = 0
ϕ(A) = 0 ,
L’espressione del lavoro delle reazioni vincolari è quindi:
Appoggio (figura 6.9)
L’equazione cinematica di vincolo è
L = FA · u(A) + MA ϕ(A) = FA · u(A) = 0 per ogni u(A) ⊥ e .
u(A) = 0 .
L’espressione del lavoro delle reazioni vincolari è quindi
L = FA · u(A) + MA ϕ(A) = MA ϕ(A) = 0
Vincoli
Fig. 6.9
Fig. 6.8
L = FA ·u(A)+MA ϕ(A) = 0
6.5
per ogni ϕ(A)
⇒ MA = 0 ,
Il lavoro si annulla quando FA ⊥ u(A), cioè quando FA * e, con MA che
può avere valore arbitrario. Dunque il doppio pendolo può reagire con una
forza agente su di una retta appartenente al fascio improprio di direzione e,
equivalente ad una coppia di valore qualsiasi ed una forza passante per la
sezione A e parallela all’asse dei pendoli (figura 6.10). I parametri reattivi in
questo caso sono MA e FA .
essendo ϕ(A) qualunque, mentre FA è arbitraria. Dunque una cerniera può
reagire solo con una forza passante per la sezione A e avente retta d’azione,
con direzione qualunque, appartenente al fascio proprio di centro A (figura
6.9). Rispetto ad un sistema di riferimento cartesiano individuato dai versori
(e1 , e2 ), FA assume l’espressione
FA = HA e1 + VA e2 ,
Corso di Scienza delle Costruzioni
91
A. A. 2009-2010
Corso di Scienza delle Costruzioni
92
A. A. 2009-2010
6
Statica delle travi
6.5
Vincoli
6
Statica delle travi
6.6
Fig. 6.11
Fig. 6.10
Incastro (figura 6.11b)
Le equazioni cinematiche di vincolo sono
"
u(A) = 0
ϕ(A) = 0 .
Carrello o pendolo (figura 6.10b)
L’ equazioni cinematica di vincolo è
u(A) · e = 0
L’espressione del lavoro delle reazioni vincolari è quindi
L’espressione del lavoro delle reazioni vincolari è quindi:
L = FA · u(A) + MA ϕ(A) = 0
per ogni u(A) ⊥ e
L = FA · u(A) + MA ϕ(A) = 0 .
per ogniϕ(A).
Il lavoro si annulla quando i due termini sono entrambi nulli, cioè quando FA *
e e MA = 0. Dunque il carrello può reagire solo con una forza passante per
la sezione A e parallela all’asse del carrello stesso (figura 6.10). Il parametro
reattivo è dato da FA .
Il lavoro è dunque sempre nullo per arbitari FA e MA . L’incastro può quindi
reagire con una forza qualunque agente nel piano, equivalente ad coppia di
valore qualsiasi ed una forza passante per la sezione A ed avente direzione
qualsiasi (figura 6.11). I parametri reattivi in questo caso sono MA , HA e VA .
6.6
Pendolo improprio (figura 6.11a)
L’ equazioni cinematica di vincolo è:
ϕ(A) = 0
L’espressione del lavoro delle reazioni vincolari è quindi
L = FA · u(A) + MA ϕ(A) = FA · u(A) = 0 per ogni u(A) .
Il lavoro si annulla dunque quando FA = 0, e con MA qualunque. Dunque
il pendolo improprio può reagire solo con una coppia MA che rappresenta il
parametro reattivo (figura 6.11).
Sconnessioni
Analogamente a quanto visto per i vincoli lisci, è possibile dedurre la caratterizzazione statica delle sconnessioni lisce utilizzando un postulato analogo a
quello relativo alle reazioni vincolari.
Postulato. Una sconnessione liscia è in grado di trasmettere un qualsiasi
sistema di forze interne che non compiono lavoro per tutti gli spostamenti
compatibili con la sconnessione stessa.
Esplicitiamo questa condizione (figura 6.12):
L = RA · u− (A) − RA · u+ (A) + MA ϕ− (A) − MA ϕ+ (A) =
%
%
= −RA · [[u]]% − MA [[ϕ]]% = 0
A
per ogni
Corso di Scienza delle Costruzioni
93
Sconnessioni
A. A. 2009-2010
Corso di Scienza delle Costruzioni
A
%
%
[[u]]%A , [[ϕ]]%A compatibili con la sconnessione.
94
A. A. 2009-2010
6
Statica delle travi
6.6
Sconnessioni
6
Statica delle travi
6.6
Sconnessioni
Le equazioni cinematiche di vincolo sono:
%
&
[[u]]%A · e = 0
%
[[ϕ]]% = 0 ,
A
pertanto:
Fig. 6.12
%
%
%
%
L = −RA · [[u]]%A − MA [[ϕ]]%A = −RA · [[u]]%A = 0 per ogni [[u]]%A ⊥ e .
%
Il lavoro si annulla quando RA ⊥ [[u]]%A , cioè quando RA * e (ovvero RA · d =
0, con MA che può avere valore arbitrario. Dunque il doppio pendolo può
trasmettere una coppia di valore qualsiasi ed una forza parallela all’asse dei
pendoli.
Si analizzano nel seguito le possibili situazioni.
Cerniera (figura 6.13)
L’equazione cinematica di vincolo è
%
[[u]]%A = 0 ,
pertanto si ha
%
%
%
L = −RA · [[u]]%A − MA [[ϕ]]%A = −MA [[ϕ]]%A = 0 per ogni
⇒ MA = 0 ,
%
[[ϕ]]%A
mentre RA è arbitraria. Dunque una cerniera può trasmettere solo forze passanti per la cerniera stessa, e di conseguenza nella sezione in cui è applicata
la sconnessione il momento flettente è nullo.
Fig. 6.14
Nel caso particolare in cui i pendoli sono diretti lungo la direzione dell’asse
della trave (figura 6.14b) , si ha:
RA · d = T (A) = 0 ,
dunque nella sezione di applicazione del doppio pendolo il taglio si annulla,
mentre sforzo normale e momento flettente sono arbitrari.
Se viceversa l’asse del doppio pendolo è perpendicolare all’asse della trave
(figura 6.14c), si ha:
Fig. 6.13
Doppio pendolo (figura 6.14)
Corso di Scienza delle Costruzioni
RA · d = N (A) = 0 ,
95
A. A. 2009-2010
Corso di Scienza delle Costruzioni
96
A. A. 2009-2010
6
Statica delle travi
6.6
Sconnessioni
dunque lo sforzo normale si annulla, mentre taglio e momento flettente sono
arbitrari.
Pendolo (figura 6.15)
L’ equazioni cinematica di vincolo è
%
[[u]]%A · e = 0 ,
Statica delle travi
6.7
Pendolo improprio (figura 6.16)
L’ equazioni cinematica di vincolo è
%
[[ϕ]]%A = 0 ,
Problema statico
dunque
%
%
%
L = RA · [[u]]%A + MA [[ϕ]]%A = RA · [[u]]%A = 0
dunque
%
%
%
L = RA · [[u]]%A + MA [[ϕ]]%A = 0 per ogni [[u]]%A ⊥ e
6
per ogniϕ(A).
per ogni
%
[[u]]%A .
Il lavoro si annulla quando RA = 0 con MA qualunque. Dunque il pendolo
improprio può trasmettere solo una coppia MA . Di conseguenza risulta
T (A) = 0
Questo implica che RA * e e MA = 0. Dunque il carrello trasmette solo una
forza passante per la sezione A e parallela all’asse del carrello stesso.
N (A) = 0 .
Fig. 6.16
6.7
Fig. 6.15
Se in particolare l’asse del pendolo è parallelo all’asse della trave, si ha
(figura 6.15a)
T (A) = 0
M (A) = 0 ,
• forze esterne
forze reattive (incognite);
• forze interne
M (A) = 0 .
Corso di Scienza delle Costruzioni
Il problema statico per una travatura con assegnato sistema di forze esterne,
consiste nella determinazione delle reazioni vincolari e delle caratteristiche
della sollecitazione (azioni interne in ogni sezione) che rendono la travatura
equilibrata.
Consideriamo una travatura soggetta ai seguenti sitemi di forze:
forze attive (assegnate);
se viceversa i due assi sono perpendicolari, si ha (figura 6.15b)
N (A) = 0
Problema statico
N , T , M (incognite).
97
A. A. 2009-2010
Corso di Scienza delle Costruzioni
98
A. A. 2009-2010
6
Statica delle travi
6.7
Problema statico
6
Statica delle travi
6.8
Teorema dell’equilibrio
• Una travatura iperstatica è staticamente indeterminata per ogni sistema
di forze esterne attive.
• Per una travatura cinematicamente indeterminata il problema statico
è, a seconda del sistema di forze esterne attive, possibile o impossibile;
in particolare per un sistema di forze per il quale il problema statico è
possibile
– se la travatura è labile, essa risulta staticamente determinata,
– se la travatura è labile a vincoli inefficaci, essa risulta staticamente
indeterminata.
6.8
Fig. 6.17
Diremo che il problema statico è
• impossibile, se non esiste un sistema di forze reattive ed un sistema di
forze interne che rendono equilibrata la travatura per i carichi esterni
(figura 6.17d,f);
Teorema dell’equilibrio
Si assegni una trave rettilinea soggetta ad un sistema di forze esterne ed interne
(figura 6.18), e supponiamo che essa sia in equilibrio. Si consideri una parte
della trave individuata da due sezioni di ascissa s1 e s2 rispettivamente, in
modo che esso non contenga al suo interno carichi concentrati, ma solo coppie
e forze distribuite.
• possibile, se esistono almeno un sistema di forze reattive e un sistema di
forze interne che rendono equilibrata la travatura; in questo caso diremo
che la travatura è
– staticamente determinata, se attraverso le sole equazioni di equilibrio è possibile determinare un unico sistema di forze reattive ed un
unico sistema di forze interne che rendono equilibrata la travatura
(figura 6.17b,c);
– staticamente indeterminata se tali sistemi non sono univocamente
determinabili con le sole equazioni di equilibrio (figura 6.17a,e).
Teorema. 6.1. (Dualità statica–cinematica).
• Una travatura isostatica è staticamente determinata per ogni sistema di
forze esterne attive.
Corso di Scienza delle Costruzioni
99
A. A. 2009-2010
Fig. 6.18
Se la trave è in equilibrio, valgono gli assiomi di Eulero, dunque è in equilibrio ogni sua parte. Gli assiomi di Eulero, scritti per il tronco s1 − s2 ,
forniscono le seguenti equazioni:
&
r(s1 , s2 ) = R(s2 ) − R(s1 ) + re (s1 , s2 ) = 0
(6.2)
mO (s1 , s2 ) = M(s2 ) − M(s1 ) + meO (s1 , s2 ) = 0 .
Corso di Scienza delle Costruzioni
100
A. A. 2009-2010
6
Statica delle travi
6.8
Teorema dell’equilibrio
6
Statica delle travi
6.8
Teorema dell’equilibrio
Nella prima delle (6.2), il termine re (s1 , s2 ) rappresenta la risultante delle forze
esterne, ossia:
' s2
e
r (s1 , s2 ) =
f ds ,
s1
inoltre, poiché tra s1 ed s2 non vi sono forze concentrate, il campo vettoriale
delle sollecitazioni R(s) è continuo, dunque per il teorema fondamentale del
calcolo integrale si ha:
' s2
dR
R(s2 ) − R(s1 ) =
ds .
s1 ds
Sostituendo questi risultati nella prima delle (6.2), si ha quindi:
)
' s2 (
dR
+ f ds = 0
per ogni s1 , s2 ∈ (0, L) .
r(s1 , s2 ) =
ds
s1
=
dR
+ f = 0 per ogni s ∈ (0, L) .
ds
(6.3)
In un sistema di riferimento locale (figure 6.7, 6.19) si può scrivere:
f = p e3 + q e2 ;
s1
=
('
c + (G(s) − O) × f ds + (G(s2 ) − O) × R(s2 ) − (G(s1 ) − O) × R(s1 ) =
s2
s1
+
*
+
)
c − s q ds − s2 T (s2 ) + s1 T (s1 ) e1 .
Per la continuità delle funzione T (s) e M (s) risulta:
+
' s2
' s2 *
d(s T )
ds
dT
ds =
T +s
ds =
s2 T (s2 ) − s1 T (s1 ) =
ds
ds
ds
s1
s1
' s2
(T − s q) ds
=
=
'
s2
s1
dM
ds ,
ds
per cui la seconda delle (6.2) diventa:
+ )
(' s2 *
dM
+ c − s q − T + s q ds e1 =
mO (s1 , s2 ) =
ds
s1
+ )
(' s2 *
dM
+ c − T ds e1 = 0 per ogni s1 , s2 ∈ (0, L) .
=
ds
s1
Proiettando la (6.3) lungo z ed y si ottiene rispettivamente:
dT
+ q = 0.
ds
101
s2*
M (s2 ) − M (s1 )
dR
dN
dT
=
e3 +
e2 .
ds
ds
ds
Corso di Scienza delle Costruzioni
'
s1
poiché la trave è rettilinea, e2 ed e3 sono costanti, per cui:
dN
+ p = 0;
ds
Consideriamo ora il termine meO (s1 , s2 ), calcolato rispetto al polo O corrispondente ad s = 0. Risulta:
meO (s1 , s2 ) =
Questa relazione deve valere per arbitrarie sezioni s1 e s2 (purché non vi siano
forze o coppie concentrate all’interno), dunque l’integrale è nullo per arbitrari
estremi di integrazione; questo implica che la funzione integranda deve essere
nulla, ossia:
R = N e3 + T e2 ;
Fig. 6.19
A. A. 2009-2010
Corso di Scienza delle Costruzioni
102
A. A. 2009-2010
6
Statica delle travi
6.8
Teorema dell’equilibrio
Questa relazione deve valere per arbitrarie sezioni s1 e s2 , dunque la funzione
integranda deve essere nulla, ossia:
6
Statica delle travi
6.9
6.9
Applicazioni
Applicazioni
6.9.1
dM
+ c − T = 0 per ogni s ∈ (0, L) .
ds
Le tre equazioni
dN
ds + p = 0
dT
+q =0
ds
dM + c − T = 0
ds
Fig. 6.21
(6.4)
rappresentano le equazioni indefinite di equilibrio per una trave rettilinea e
sono valide in ogni sezione in cui non sia applicato un carico concentrato. Si
ricorda che in queste equazioni i segni delle funzioni N , T , M , p, q e c sono
positivi se rispettano le convenzioni rappresentate in figura 6.20.
La trave in figura 6.21 è isostatica, dunque staticamente determinata. Per
determinare le reazioni vincolari e le caratteristiche della sollecitazione sono
sufficienti le equazioni di equilibrio. La caratterizzazione statica dell’incastro
fornisce per esso le tre componenti reattive HA , VA , MA (figura 6.22).
Fig. 6.22
Fig. 6.20
Le equazioni cardinali della statica, fissando il polo per i momenti in A,
danno
HA + F cos α = 0
HA = −F cos α
VA − F sin α = 0
⇒
V = F sin α
A
MA − F L sin α = 0
MA = F L sin α .
La reazione HA ha componente negativa, per cui è diretta verso destra. Rappresentiamo lo schema di corpo libero:
Per determinare le leggi di variazione delle caratteristiche della sollecitazione, fissiamo un’ascissa s ∈ (0, L) lungo l’asse della trave, e consideriamo la
parte di trave a sinistra (o alternativamente a destra) della sezione di ascissa
Corso di Scienza delle Costruzioni
103
A. A. 2009-2010
Corso di Scienza delle Costruzioni
104
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
6
Statica delle travi
6.9
Applicazioni
Fig. 6.23
Fig. 6.25
generica s (figura 6.24). Le caratteristiche della sollecitazione sono date dalla
risultante e dal momento risultante rispetto alla sezione considerata di tutte
le forze esterne agenti sulla parte di sinistra (o alternativamente di destra)
secondo le convenzioni rappresentate in figura 6.20. Si ottiene
N (s) = F cos α
T (s) = F sin α
M (s) = −F L sin α + F s sin α
Fig. 6.26
6.9.2
La trave in figura 6.26 è isostatica, dunque staticamente determinata. La
caratterizzazione statica della cerniera fornisce per essa le componenti reattive
HA e VA , mentre per il carrello in B si ha VB (figura 6.27).
Fig. 6.24
Si osservi che le leggi di variazione cosı̀ ricavate rispettano le equazioni
indefinite di equilibrio. Infatti, non essendoci carichi distribuiti, dN/ds =
dT /ds = 0, dunque N e T sono costanti, mentre dM/ds = T , dunque M è
lineare rispetto ad s. I diagrammi delle sollecitazioni sono rappresentati in
figura 6.25 (si noti che il diagramma del momento flettente si rappresenta con
le ordinate positive verso il basso).
Corso di Scienza delle Costruzioni
105
A. A. 2009-2010
Fig. 6.27
Sostituendo il carico distribuito q con una forza concentrata equivalente di
modulo pari a qL e applicata in mezzeria del tratto su cui è applicato il carico,
Corso di Scienza delle Costruzioni
106
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
6
Statica delle travi
6.9
Applicazioni
le equazioni cardinali della statica, fissando il polo per i momenti in A, danno:
HA = 0
HA = 0
qL
VA + VB − qL = 0 ⇒
VA =
2
qL
VB L − qL L = 0
V
=
.
B
2
2
Rappresentiamo lo schema di corpo libero:
Fig. 6.29
Fig. 6.28
Per determinare le leggi di variazione delle caratteristiche della sollecitazione, fissiamo un’ascissa s ∈ (0, L) lungo l’asse della trave, e consideriamo la
parte di trave a sinistra (o alternativamente a destra) della sezione di ascissa
generica s (figura 6.29). Le caratteristiche della sollecitazione sono date dalla
risultante e dal momento risultante rispetto alla sezione considerata di tutte
le forze esterne agenti sulla parte di sinistra (o alternativamente di destra)
secondo le convenzioni rappresentate in figura 6.20:
N (s) = 0
qL
− qs
T (s) =
2
2
M (s) = qL s − qs
2
2
Si osservi che dN/ds = 0, dT /ds = −q, dM/ds = T , dunque M ha
andamento parabolico. Nella sezione s = L/2 dove T = 0 il diagramma del
momento presenta un massimo relativo: M (L/2) = qL2 /8.
Fig. 6.30
Fig. 6.31
6.9.3
Studiamo cinematicamente la travatura in figura 6.31 con il metodo geometrico
(figura 6.32). Essa è costituita da tre corpi rigidi vincolati con un doppio
Corso di Scienza delle Costruzioni
107
A. A. 2009-2010
Corso di Scienza delle Costruzioni
108
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
6
Statica delle travi
6.9
Applicazioni
Fig. 6.32
pendolo (vincolo doppio), un carrello (vincolo semplice) e un incastro (vincolo
triplo), e connessi con un pendolo (connessione semplice) ed un doppio pendolo
(connessione doppia) per cui risulta:
l = 3n − v − c = 9 − (2 + 1 + 3) − (1 + 2) = 0 ;
dunque la travatura può essere isostatica o labile a vincoli inefficaci. Il doppio pendolo in A fissa il centro di rotazione CI del primo tratto nel punto
improprio associato alla direzione orizzontale, mentre il carrello in C impone
che lo stesso CI debba appartenere alla retta verticale r. Queste condizioni
sono incompatibili, dunque non può esserci alcun CI , cioè il tratto I non può
subire spostamenti rigidi infinitesimi. Lo stesso si può dire per il tratto III per
effetto dell’incastro che sottrae ad esso tutti i gradi di libertà. Il pendolo in
D impone che il centro di rotazione relativo CI,II debba trovarsi sulla retta s,
ma essendo il campo di spostamenti di I identicamente nullo, questa diventa
una condizione su CII . Allo stesso modo il doppio pendolo in E impone che
CII,III sia il punto improprio associato alla direzione orizzontale, ma essendo
il campo di spostamenti di III nullo, anche questa diventa una condizione su
CII . Queste ultime due condizioni sono incompatibili, dunque non può esistere
CII , per cui nessuno dei tre tratti può subire spostamenti rigidi infinitesimi e
la struttura è isostatica, dunque anche staticamente determinata.
La caratterizzazione statica dei vincoli fornisce le componenti reattive HA
e MA per il doppio pendolo, VC per il carrello e HF , VF MF per l’incastro
(figura 6.33).
Corso di Scienza delle Costruzioni
109
A. A. 2009-2010
Fig. 6.33
Per determinare le reazioni vincolari utilizziamo le equazioni cardinali della
statica, fissando il polo per i momenti in F, e le equazioni di sconnessione.
La sconnessione in D è doppia, per cui avremo due equazioni statiche. In
particolare il pendolo trasmette solo forze interne parallele al suo asse, per
cui si annulleranno sforzo normale e taglio (si veda la figura 6.15). Il doppio
pendolo in E trasmette solo forze dirette lungo il suo asse e coppie, dunque si
annulla il taglio (si veda la figura 6.14). Essendovi però una forza applicata
sulla sezione di sinistra, il taglio sarà nullo solo a destra, mentre a sinistra
avrà valore in modulo pari al modulo della forza applicata.
0
Fo = 0
0
Fv = 0
0
M (F) = 0
M (D) = 0
N (D) = 0
Tdx (E) = 0
HA − qL − HF = 0
VC − qL − qL + VF = 0
2
MA − HA L − qL2 − 3LVC + qL2 + q L + MF = 0
2
⇒
2+H L+V L=0
−M
+
qL
A
A
C
HA = 0
qL − VF = 0
Corso di Scienza delle Costruzioni
110
A. A. 2009-2010
6
Statica delle travi
HA = 0
6.9
Applicazioni
6
Statica delle travi
MA = 2qL2
6.9
Applicazioni
N (s2 ) = 0
T (s2 ) = 0
M (s2 ) = −2qL2 + qL2 = −qL2
⇒ VC = qL
VF = qL
qL2
HF = −qL MF =
.
2
Rappresentiamo lo schema di corpo libero:
• CE, s3 ∈ (0, 2L)
N (s3 ) = 0
T (s3 ) = qL
M (s3 ) = −2qL2 + qL2 + qLs3 = qLs3 − qL2
• EF, s4 ∈ (0, L)
N (s4 ) = qs4
T (s4 ) = qL − qL − qs4 = −qs4
qL2 q(L − s4 )2
qs2
M (s4 ) = qL(L − s4 ) +
−
= qL2 − 4
2
2
2
Fig. 6.34
I punti di discontinuità delle leggi di variazione delle caratteristiche della
sollecitazione sono:
• sezioni B e C per la presenza di forze e coppie concentrate e per la
variazione di direzione dell’asse della trave;
• sezione E per la presenza di un forza concentrata e per la discontinuità
del carico distribuito.
Fissate sui vari tratti delle ascisse come indicato in figura, si ottengono le
seguenti leggi ed i corrispondenti diagrammi.
6.9.4
• AB, s1 ∈ (0, L)
Studiamo cinematicamente la travatura in figura 6.37 con il metodo geometrico (figura 6.38). Essa costituita da due tratti vincolati con una cerniera
(vincolo doppio) e due carrelli (vincoli semplici), e connessi con una cerniera
(connessione doppia) per cui risulta:
N (s1 ) = 0
T (s1 ) = 0
M (s1 ) = −2qL2
• BC, s2 ∈ (0, L)
Corso di Scienza delle Costruzioni
Si osservi che in B il diagramma del momento flettente non si può ribaltare, in quanto il suo valore nella sezione immediatamente a sinistra è diverso
da quello nella sezione immediatamente a destra a causa della presenza della
coppia concentrata. In figura 6.36 sono riportate le coppie agenti sul nodo B
(le due forze interne più la coppia concentrata) che come si può vedere rispettano l’equilibrio alla rotazione. In C invece, non essendovi coppie concentrate
applicate, ma solo una forza concentrata, i due momenti a sinistra e a destra
sono uguali, dunque il diagramma può essere ribaltato. In E vi è una forza
concentrata perpendicolare all’asse della trave, dunque si riscontra un salto
nel diagramma del taglio, e di conseguenza un punto angoloso nel diagramma
del momento flettente. Nella sezione a destra di E il taglio si annulla e dunque
vi è un punto di massimo relativo del momento.
l = 3n − v − c = 6 − (2 + 1 + 1) − 2 = 0 ;
111
A. A. 2009-2010
Corso di Scienza delle Costruzioni
112
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
6
Statica delle travi
6.9
Applicazioni
Fig. 6.37
Fig. 6.38
Fig. 6.35
Fig. 6.36
dunque la travatura pu essere isostatica o labile a vincoli inefficaci. La cerniera
in A fissa il centro di rotazione CI del primo tratto nella cerniera stessa, mentre
Corso di Scienza delle Costruzioni
113
A. A. 2009-2010
i due carrelli in E ed F impongono ciascuno che il centro CII debba appartenere
alle rispettive rette efficaci. Queste ultime due condizioni impongono che CII
debba trovarsi nell’intersezione dei due assi, mentre la cerniera in C impone
che il centro di rotazione relativo CI,II debba trovarsi nella cerniera stessa. I tre
possibili centri di rotazione CI , CII e CI,II non sono allineati, dunque il primo
teorema delle catene cinematiche ci permette di affermare che la struttura
isostatica. Infatti se la struttura potesse subire spostamenti rigidi infinitesimi,
il teorema imporrebbe l’allineamento dei tre centri di rotazione, e questo va
in contrasto con le condizioni imposte dai vincoli, dunque non sono possibili
spostamenti rigidi.
La caratterizzazione statica dei vincoli fornisce le componenti reattive HA
e VA per la cerniera, VE e HF per i carrelli (figura 6.40).
Per determinare le reazioni vincolari utilizziamo le equazioni cardinali della statica, fissando il polo per i momenti in A, e l’equazione di sconnessio-
Corso di Scienza delle Costruzioni
114
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
6
Statica delle travi
6.9
Applicazioni
Fig. 6.39
ne. La cerniera in C impone che il momento flettente sia nullo nella sezione
immediatamente a destra, mentre a sinistra è pari a −C.
0
HA + qL − HF = 0
Fo = 0
VA + VE = 0
0 Fv = 0
2
⇒
0
−q L − C + VE 3 L = 0
M (A) = 0
2
2
M (C) = 0
VE L − H F L = 0
dx
Fig. 6.40
Fissate sui vari tratti delle ascisse come indicato in figura, si ottengono le
seguenti leggi ed i corrispondenti diagrammi, nei quali si riporta separatamente
l’effetto del carico distribuito q e della coppia C.
2
2C
qL 2 C
HA = − qL +
VA = −
−
3
3
L
3
3L
⇒
qL 2 C
qL 2 C
VE =
+
HF =
+
.
3
3L
3
3L
Rappresentiamo lo schema di corpo libero:
I punti di discontinuità delle leggi di variazione delle caratteristiche della
sollecitazione sono:
• sezione B per la variazione di direzione dell’asse della trave e per la
discontinuità del carico distribuito;
• sezione C per la presenza di una coppia concentrata;
• sezione D per la presenza di un nodo triplo.
Corso di Scienza delle Costruzioni
115
A. A. 2009-2010
Corso di Scienza delle Costruzioni
116
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
• AB, s1 ∈ (0, L)
6
Statica delle travi
• DE, s3 ∈
qL 2 C
+
3
3L
2
2C
T (s1 ) = qL −
− qs1
3
3L
*
+
2
2C
s2
M (s1 ) = − − qL +
s1 − q 1
3
3L
2
*
+
L
• BC, s2 ∈ 0,
2
N (s1 ) =
6.9
*
0,
L
2
N (s3 ) = 0
Applicazioni
+
qL 2 C
T (s3 ) = −
−
3
3L
*
+*
+
qL 2 C
L
M (s3 ) =
+
− s3
3
3L
2
• DF, s4 ∈ (0, L)
N (s4 ) = 0
qL 2 C
−
3
3L
qL 2 C
T (s2 ) = −
−
3
3L
*
+*
+ *
+
qL 2 C
3
qL 2 C
M (s2 ) = −C +
+
L − s2 −
+
L=
3
3L
2
3
3L
N (s2 ) = −
qL 2 C
+
3
3L
*
+
qL 2 C
M (s4 ) = −
+
(L − s4 )
3
3L
T (s4 ) =
In figura 6.41 sono riportate le forze agenti sui nodi B e C, in figura 6.42
sono riportati i diagrammi delle caratteristiche della sollecitazione.
L
2C
L2
− q s2 −
(s2 + L)
6
3
3L
*
+
L
• CD, s2 ∈
,L
2
=q
qL 2 C
−
3
3L
qL 2 C
T (s2 ) = −
−
3
3L
*
+*
+ *
+
qL 2 C
3
qL 2 C
M (s2 ) =
+
L − s2 −
+
L=
3
3L
2
3
3L
N (s2 ) = −
=q
L2
L
2C
− q s2 −
s2
6
3
3L
Fig. 6.41
Corso di Scienza delle Costruzioni
117
A. A. 2009-2010
Corso di Scienza delle Costruzioni
118
A. A. 2009-2010
6
Statica delle travi
6.9
Applicazioni
Fig. 6.42
Corso di Scienza delle Costruzioni
119
A. A. 2009-2010
Scaricare