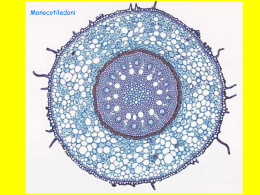
1 Controlli automatici Luogo delle radici Ing. Alessandro Pisano [email protected] 2 Il luogo delle radici nasce per risolvere il seguente problema: Dati due polinomi P1(s) e P2(s), determinare come variano, al variare del numero reale positivo k, le radici del polinomio P(s) P1 s kP2 s k [0, ) 3 Nel contesto della teoria dei controlli, tale problema si incontra nel momento in cui si analizza il seguente sistema di controllo in retroazione ydes t k Gs y (t ) H s e ci si pone il problema di determinare la dipendenza dei poli della FdT a ciclo chiuso dal guadagno k. N.B. La FdT G(s) “accorpa”, a meno del guadagno k, le FdT del regolatore e del processo 4 Schema equivalente ydes t Siano kGs 1 kGs H s N G s Gs DG s y(t ) N H s H s DH s La FdT a ciclo chiuso è N G s DG s kNG s DH s kGs y Wydes s N s N s 1 kGs H s 1 k G DG s DH s kNG s N H s H DG s DH s k 5 N G s DG s kNG s DH s kGs Wyydes s 1 kGs H s 1 k N G s N H s DG s DH s kNG s N H s DG s DH s k I suoi poli sono le radici del polinomio caratteristico Pcar s DG s DH s kNG s N H s che può essere espresso nella forma Pcar (s) P1 s kP2 s Operativamente, è conveniente riferirsi alla FdT a ciclo aperto (escludendo dal ciclo il guadagno k) Ls Gs H s P1 s DG s DH s P2 s NG s N H s 6 parametrizzata nella maniera seguente (fattorizzazione poli-zeri, o “PZ”) s z1 s z2 ...s zm Ls k s p1 s p2 ...s pn Nei sistemi di controllo fisicamente realizzabili si avra sempre nm Il coefficiente k viene denominato “guadagno in alta frequenza” Guadagno in HF della L(s) k lim s nm Ls s Pcar s s p1 s p2 ...s pn kk s z1 s z2 ...s zm Grado n Poli della FdT a ciclo aperto L(s) Zeri della FdT a ciclo aperto L(s) 7 Esempio Analisi del carrello in movimento su piano con pendenza nulla vdes t ev t kP s kI s Il regolatore PI può essere espresso come vdes t ev t kp F (t ) 1 ms b RPI s s kI / kP s v(t ) kP s kI s kI / kP kP s s F (t ) 1 ms b v(t ) 8 Esempio vdes t ev t kp s kI / kP s F (t ) 1 ms b v(t ) L(s) Il guadagno proporzionale kp è il parametro k rispetto al quale si desidera “tracciare” il luogo delle radici, analizzando cosi la dipendenza dei poli a ciclo chiuso del sistema di controllo dal guadagno kp sotto l’ipotesi che il rapporto tra le costanti proporzionale ed integrale, ki/kp, venga mantenuto costante. 9 Esempio vdes t ev t kp s kI / kP s F (t ) 1 ms b v(t ) L(s) FdT a ciclo aperto (escludendo dal ciclo la kp) Ls s kI / kP 1 1 s ms b m Sviluppiamo ulteriormente la FdT a ciclo aperto k k s I s I 1 1 s z1 kP 1 kP Ls k b s p1 s p2 m s s b m s s m m kI kP 1 s s b m s 1 k m p1 0 kI kP b p2 m z1 Il valore del rapporto ki/kp, con il meno davanti, definisce la posizione dello zero z1=-ki/kp che il regolatore “aggiunge” alla FdT L(s) a ciclo aperto. Il regolatore aggiunge alla L(s) anche un polo nell’origine (p1=0). 10 Esempio vdes t ev t kI 1 kP b m s s m s kp v(t ) L(s) b 1 kI Pcar s s s k p s m m kP Poli della L(s) Guadagno in HF della L(s) Zeri della L(s) Si osservi come nella L(s) vadano a confluire i poli e gli zeri sia del regolatore che del processo. La posizione dello zero è un ulteriore grado di liberta rispetto al guadagno. La analisi del luogo delle radici associato alla L(s), che costruiremo di qui a breve, ci fornirà importanti indicazioni in merito alla taratura del regolatore. 11 Guadagno in alta frequenza k lim s nm Ls s E’differente dal guadagno in bassa frequenza Es. Ls k lim s s nm s 0 2s 1 s 2 2s 6 2ss 1 2s 2 2s F s lim s 2 lim 2 2 s s 2s 6 s s 2s 6 1 lim Ls L0 s 0 3 Ls lim Ls L0 s 1 1 31 2 1 s s 1 3 6 12 Il LdR è una costruzione grafica che consiste nell’insieme delle “traiettorie” che i poli a ciclo chiuso (le n radici del polinomio Pcar(s)) percorrono nel piano complesso quando il parametro k varia tra zero e infinito. Si avranno pertanto n curve parametriche nel piano, orientate secondo il verso crescente del parametro k Es. Un possibile LdR per n=3 k Im k 0 k k 0 k 0 k Re 13 La costruzione del luogo ha inizio riportando sul piano complesso le posizione dei poli pi e degli zeri zi della FdT a ciclo aperto Es. Im n=3 m=1 x poli zeri x x x Re x I punti di partenza (k=0) degli n rami del LdR sono gli n poli della Fdt a ciclo aperto identificati in figura. Cio non deve stupire perché: k 0 Pcar s s p1 s p2 ...s pn kk s z1 s z2 ...s zm 14 Il luogo ha n rami, dei quali, per k m convergono verso gli zeri n-m convergono verso direzioni asintotiche (una “stella” di semirette che si dipartono dal punto dell’asse reale avente ascissa xs) Sia il luogo delle radici che l’insieme delle direzioni asintotiche risultano essere simmetrici rispetto all’asse reale. ASINTOTI Centro stella Angoli formati con l’asse reale positivo n xs m p z i 1 i i 1 i nm 2k 1 k nm k 0,1,..., n m 1 15 2 nm Direzioni asintotiche adiacenti formano sempre lo stesso angolo Se il numero delle direzioni asintotiche (n-m) è dispari, ve ne è sempre una diretta come l’asse reale negativo, sovrapposta ad esso. Se il numero delle direzioni asintotiche (n-m) è pari, nessuna di queste è diretta come l’asse reale Im Im 16 Direzioni asintotiche adiacenti formano sempre lo stesso angolo 2 nm Se il numero delle direzioni asintotiche è dispari, ve ne è sempre una diretta come l’asse reale negativo, sovrapposta ad esso. Se il numero delle direzioni asintotiche è pari, nessuna direzione asintotica è diretta come l’asse reale Im Im 17 n m 1 0 k 0 Im nm 3 k 0 Im 1 3 / 2 xs nm Re xs nm 2 0 / 2 2k 1 k Re 2 5 / 3 300 Im 0 / 3 1 k 1 k 0 k 1 nm 4 Im k 2 xs k 2 k 0 k 1 Re Re xs k 3 18 Appartengono al luogo delle radici tutti i segmenti dell’asse reale che lasciano alla propria destra un numero dispari di poli e zeri Es. Im n=4 m=1 zeri x x x x poli Re x I segmenti dell’asse reale identificati a seguito di tale proprietà sono tali che: se uno di essi unisce un polo ad uno zero allora tale segmento costituisce uno dei rami del luogo delle radici. se uno di essi parte da un polo e poi evolve verso meno infinito allora tale segmento costituisce uno dei rami del luogo delle radici. 19 Capita talvolta che due (o più) rami del luogo delle radici confluiscano l’uno verso l’altro fino a incontrarsi in un punto. Tali punti vengono chiamati punti doppi. Tutti i punti doppi s*, se ve ne sono, soddisfano la relazione m n 1 1 0 * * i 1 s zi i 1 s pi detta “equazione dei punti doppi” NB L’equazione dei punti doppi fornisce anche soluzioni addizionali “non ammissibili” (in quanto non appartenenti al luogo delle radici) che vanno scartate. L’insieme di tutte le “regole di tracciamento” date consente di definire in maniera alquanto attendibile l’andamento del luogo 20 Lista delle regole di tracciamento 1. Riporto sul piano complesso le posizione dei poli pi e degli zeri zi della L(s) 2. Gli n rami partono per k=0 dai poli pi e convergono, per valori di k tendenti a +, verso gli zeri zi o verso le direzioni asintotiche n 3. Centro stella degli asintoti 4. Direzioni asintotiche n m 1 nm 3 xs m p z i 1 i i 1 i nm nm 2 nm 4 21 5. Il luogo delle radici è simmetrico rispetto all’asse reale. 6. Appartengono al luogo delle radici tutti i segmenti dell’asse reale che lasciano alla propria destra un numero dispari di poli e zeri. Se qualcuno di tali segmenti unisce un polo ad uno zero, oppure se va da un polo verso meno infinito, allora è uno dei rami del luogo delle radici. 7. Equazione dei punti doppi m n 1 1 0 * * i 1 s zi i 1 s pi 22 Es. 1 Ls 1 s p ydes t k 1 s p y (t ) 23 Ls ydes t 1 s p 1 s p k y (t ) Due casi: p0 p0 Im x Re p “Velocizzazione” della dinamica del sistema a ciclo chiuso Im x p Re Stabilizzazione di un sistema instabile a ciclo aperto (k>p) Appartiene al luogo il segmento alla sinistra del polo, ed è anche uno dei rami del luogo (l’unico ramo in questo caso) Wyydes s k s pk Pcar s s p k s pk 24 Es. 1A 1 Ls s2 ydes t k p 2 Im x 1 s2 y (t ) s (2 k ) Re 2 1 2k Guadagno a ciclo chiuso (guadagno statico) Wyydes s k s2k g Wyydes 0 k 2k Il guadagno dipende da k, e tende ad 1 per k che tende a infinito 25 Ci attendiamo che al crescere di k la risposta sarà sempre monotona crescente, con tempi di assestamento via via più ridotti a seguito dell’allontanamento dall’origine del polo a ciclo chiuso (cui corrisponde una riduzione della costante di tempo associata). Il valore di regime delle risposte è differente al variare di k. k g 2k Step Response 1 0.8 Il guadagno determina il valore di regime della risposta al gradino, e in questo caso risulta influenzato anche dai parametri del sistema (la posizione del polo in -2) Amplitude k=0.1 0.6 k=1 k=5 k=10 k=100 k=200 0.4 0.2 0 0 0.5 1 1.5 Time (sec) 2 2.5 3 26 Es. 2 Ls ydes t 1 ss 3 1 ss 3 k Im x 3 x Re Ci sarà necessariamente un punto doppio compreso tra 0 e -3. y (t ) 27 Ls ydes t 1 ss 3 1 ss 3 k Im x 3 x Re 1.5 Ci sarà necessariamente un punto doppio compreso tra 0 e -3. Centro stella xs 30 1.5 2 Asintoti a + e – 90 gradi y (t ) 28 Ls ydes t 1 ss 3 Se il punto doppio sta a sinistra del centro stella si avra un LdR 1 ss 3 k Se il punto doppio sta a destra del centro stella si avra un LdR Im x x 3 1.5 y (t ) Im Re x 3 1.5 x Re 29 Equazione dei punti doppi 1 1 0 * * s s 3 s* 3 s* 2s * 3 * 0 s 3 / 2 1.5 * * * * s s 3 s s 3 I punto doppio si trova a meta strada tra i due poli. Per FdT L(s) del secondo ordine con poli reali e senza zeri, come il sistema a ciclo aperto L(s) dell’esempio, questo vale sempre. I rami del LdR avranno il seguente andamento Im Interpretazione x 3 1.5 x Re 30 Ls 1 ss 3 Wyydes s k ss 3 k ydes t 1 ss 3 k Pcar s s 3s k 2 y (t ) 3 9 s k 2 4 Per k < 9/4=2.25 abbiamo a ciclo chiuso due poli real distinti Per k =2.25 abbiamo a ciclo chiuso due poli reali coincidenti (entrambi pari a -3/2) Per k >2.25 abbiamo a ciclo chiuso due poli complessi coniugati (entrambi con parte reale pari a -3/2) Guadagno a ciclo chiuso (guadagno statico) Wyydes s k ss 3 k g Wyydes 0 1 Il guadagno vale sempre 1 31 Soglia: k =2.25 Step Response 1.5 k=0.5 k=1.25 k=2.25 k=3 k=10 k=30 Amplitude 1 k1=0.5; k2=1.25; 0.5 k3=2.25; k4=3; k5=10; k6=30; G1=tf(k1,[1 3 k1]); G2=tf(k2,[1 3 k2]); G3=tf(k3,[1 3 k3]); 0 0 5 10 15 G4=tf(k4,[1 3 k4]); Time (sec) G5=tf(k5,[1 3 k5]); G6=tf(k6,[1 3 k6]); step(G1,G2,G3,G4,G5,G6,[0:0.01:30]),grid,axis legend('k=0.5','k=1.25','k=2.25','k=3','k=10','k=30') 20 25 30 32 Esempio kI 1 kP L( s ) b m s s m vdes t s kI 1 kP b m s s m s kp s z1 Ls k s p1 s p2 1 k m b p2 m p1 0 v(t ) kI z1 kP Due casi: z1 p2 z1 p2 Im x p2 x z1 Im Re x z1 p2 x Re 33 Esempio z1 p2 Im x z1 x p2 Punto doppio Punto doppio Re 34 Taratura del luogo Il problema della taratura del luogo delle radici consiste nella determinazione del valore del guadagno k associato ad un determinato punto P del luogo delle radici s z1 s z2 ...s zm Ls k s p1 s p2 ...s pn Pcar s s p1 s p2 ...s pn kk s z1 s z2 ...s zm k 1 1 2 ... n k r1r2 ...rm i dist ( P, pi ) ri dist ( P, zi ) dist ( P, pi ) Distanza del punto P dal generico polo pi dist ( P, zi ) Distanza del punto P dal generico zero zi
Scaricare