2
Vettori applicati
2
Vettori applicati
2.1
Nozione di vettore applicato
Numerose grandezze fisiche sono descritte da vettori (spostamento, velocità,
forza, campo elettrico, ecc.). Per alcune di esse e, in particolare, per le forze, è
necessario tuttavia precisare, oltre a direzione, verso e modulo, anche il punto
di applicazione. L’effetto di una forza su di un corpo deformabile può infatti
variare notevolmente al variare del punto di applicazione. Queste considerazioni si traducono nel fatto che una forza è descritta matematicamente da un
vettore applicato.
Definizione. 2.1. Si definisce vettore applicato una coppia (A, u), con A ∈ E
e u ∈ V. Il punto A è detto punto di applicazione, la retta cui appartiene u è
detta retta d’azione.
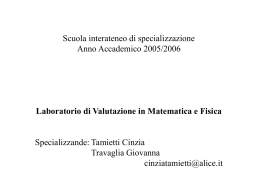
Definizione. 2.2. Si definisce momento del vettore applicato (A, u) rispetto
al punto O, detto polo, il vettore (libero) m(O) cosı̀ definito:
m(O) = (A − O) × u .
Si osservi che
• per le proprietà del prodotto vettoriale, il vettore momento m(O) è perpendicolare al piano passante per O e contenente il segmento orientato
B − A che rappresenta il vettore u (figura 2.1). Inoltre risulta:
− O)u = |u|b ,
|m(O)| = AO|u| sin(A!
dove b = AO sin(A!
− O)u = AO sin θ (> 0), detto braccio del vettore
u rispetto ad O, rappresenta geometricamente la distanza della retta
d’azione di (A, u) dal polo O;
• se u $= 0, allora m(O) = 0 se e solo se il polo O appartiene ala retta
d’azione del vettore applicato;
• il momento del vettore applicato (C, u), con C appartenente alla retta
d’azione r, è uguale a quello di (A, u) prima definito; in altri termini, se
facciamo scorrere un vettore applicato lungo la sua retta d’azione il suo
momento rispetto ad un generico polo C non varia.
Corso di Scienza delle Costruzioni
14
A. A. 2009-2010
2
Vettori applicati
2.2
Sistemi di vettori applicati
2
Vettori applicati
2.2
Sistemi di vettori applicati
scrivere
m(O! ) =
n
n
!
!
"
#
(Ai − O! ) × ui =
(Ai − O) + (O − O! ) × ui =
i=1
i=1
n
n
!
!
(Ai − O) × ui +
(O − O! ) × ui =
=
i=1
Fig. 2.1
= m(O) + (O − O! ) ×
Il vettore momento è un vettore libero; talvolta, dal punto di vista grafico, i
vettori momento sono rappresentati con una freccia a doppia punta o con un
arco di circonferenza orientato nel piano perpendicolare al vettore stesso.
2.2
Sistemi di vettori applicati
Un sistema di vettori applicati S è un insieme (finito) di vettori applicati del
tipo:
S = {(A1 , u1 ), (A2 , u2 ), . . . , (An , un )} .
Definizione. 2.3. Si definisce risultante del sistema di vettori applicati S il
vettore (libero)
r=
n
!
ui .
Definizione. 2.4. Si definisce momento risultante di S rispetto al polo O ∈ E
il vettore (libero)
Pertanto, al variare del polo, il momento risultante varia secondo la legge
m(O! ) = m(O) + r × (O! − O) ,
(2.1)
detta formula di trasposizione dei momenti.
La formula appena enunciata permette di stabilire che il momento risultante di un sistema S di vettori applicati non dipende dal polo se e solo se ha
risultante r = 0. In tal caso il campo vettoriale di m è quindi omogeneo.
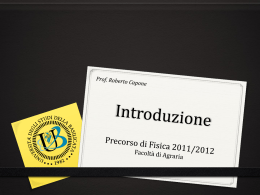
Un esempio significativo di sistema di vettori applicati a risultante nullo
è la coppia di forze, costituito da due vettori opposti (cioè aventi la stessa
direzione, lo stesso modulo e verso opposto – figura 2.2):
S = {(A, u), (B, −u)} .
r =u−u=0
m(A) = (A − B) × u + (B − B) × u = (A − B) × u = m (cost.)
Detta b la distanza tra le due rette d’azione (tra loro parallele), si ha
n
!
(Ai − O) × ui .
i=1
L’applicazione O ∈ E %→ m(O) è detta campo vettoriale del momento.
Dalla definizione di momento risultante, con riferimento ad un polo O! , si può
Corso di Scienza delle Costruzioni
i=1
ui = m(O) + (O − O! ) × r .
Per tale sistema si ha
i=1
m(O) =
i=1
n
!
15
A. A. 2009-2010
|m| = b|u| ,
ove b è detto braccio della coppia. Per semplicità spesso una coppia viene
rappresentata solo attraverso il suo momento.
Corso di Scienza delle Costruzioni
16
A. A. 2009-2010
2
Vettori applicati
2.3
Asse centrale
2
Vettori applicati
2.3
Asse centrale
Fig. 2.2
2.3
Asse centrale
Si considerino ora sistemi di vettori applicati con risultante r $= 0. In tal caso,
se si scelgono due punti O e O! in modo che (O! − O) ' r, risulta m(O! ) =
m(O). In altri termini, m non varia lungo rette parallele ad r. Infatti, se si
moltiplicano ambo i membri della 2.1 per r, si ha
m(O! ) · r + r × (O! − O) · r = m(O! ) · r .
Dunque tale prodotto scalare è costante, e prende il nome di invariante scalare:
I = m(O! ) · r = cost.
Questa
$ relazione permette di affermare che la componente di m lungo r (pari
a I |r|) è indipendente dal polo O.
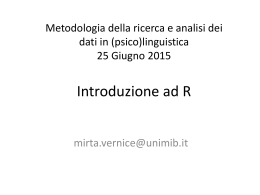
Se si decompone m nella sua componente vettoriale p parallela ad r ed in
quella n ad esso perpendicolare, si ha (figura 2.3):
m(O) = p + n(O) ,
(2.2)
ove, per quanto visto, la componente p è costante e pari a
p=
Definizione. 2.5. Si definisce asse centrale di un sistema di vettori applicati
S il luogo dei punti Q ∈ E rispetto ai quali m(Q) ' r (cioè n(Q) = 0 e
m(Q) = p).
L’asse centrale è dunque il luogo descritto dall’equazione n(Q) = 0. Utilizzando la formula di trasposizione dei momenti, quest’ultima equazione assume
la forma:
n(Q) = m(Q) − p = [m(O) + r × (Q − O)] − p = n(O) + r × (Q − O) = 0 ,
per cui i punti cercati devono soddisfare l’equazione
r × (Q − O) = −n(O) .
Ricordando che un’equazione del tipo a × x = b, con a, b ∈ V, a · b = 0,
a $= 0, b $= 0, ha come soluzioni
x=
I
r.
|r|2
si ha
Pertanto solo la componente normale n dipende dalla scelta del polo O.
Corso di Scienza delle Costruzioni
Fig. 2.3
17
A. A. 2009-2010
b×a
+ µa, µ ∈ IR ,
|a|2
(Q − O) =
r × n(O)
+ µr, µ ∈ IR .
|r|2
Corso di Scienza delle Costruzioni
18
(2.3)
A. A. 2009-2010
2
Vettori applicati
2.4
Sistemi equivalenti
2
Vettori applicati
2.4
Sistemi equivalenti
L’equazione 2.3 descrive, al variare del parametro reale µ, i punti di una retta
parallela ad r e passante per il punto
O=O+
r × n(O)
r × m(O)
=O+
.
|r|2
|r|2
Si osservi che per tutti i punti Q appartenenti all’asse centrale si ha m(Q) =
p e, pertanto,
%
|m(Q)| = |p| < |p|2 + |n(O)|2 = |m(O)| ,
dove O è un generico punto non appartenente all’asse centrale. In altri termini,
l’asse centrale è l’insieme dei punti di E rispetto ai quali è minimo il modulo
del momento risultante. Per tali punti m(Q) = p.
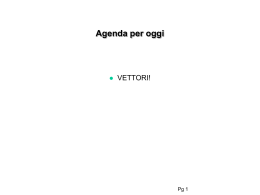
Osservazione. Si consideri un punto Q appartenente all’asse centrale. Il
momento risultante rispetto ad un generico polo O è dato da
m(O) = m(Q) + r × (O − Q) = p + r × (O − Q) ,
(2.4)
dove r × (O − Q) = n(O) è la componente perpendicolare. Alla luce di quanto
visto, per studiare il campo del vettore momento è sufficiente rappresentare la
legge 2.4 per tutti i punti appartenenti ad un generico piano perpendicolare ad
r (figura 2.4). Il campo sarà lo stesso su tutti i piani a quest’ultimo paralleli.
2.4
Definizione. 2.6. Due sistemi di vettori applicati S e S ! si dicono equivalenti
se hanno lo stesso risultante e lo stesso momento risultante rispetto ad un
generico polo O:
m(O) = m! (O) .
(2.5)
In virtù della formula di trasposizione dei momenti e della 2.5, due sistemi
equivalenti hanno lo stesso momento risultante rispetto a qualunque punto
O! ∈ E. Inoltre, se r $= 0, i due sistemi hanno lo stesso asse centrale.
Definizione. 2.7. Un sistema di vettori applicati S si dice equilibrato o
equivalente a zero se risulta:
r = 0,
m(O) = 0 ,
Corso di Scienza delle Costruzioni
Per la formula di trasposizione dei momenti, dalla 2.6 segue che m(O! ) =
0 ∀O! ∈ E.
Definizione. 2.8. Sia S un sistema di vettori applicati avente risultante r e
momento risultante m(O) rispetto ad un polo O. Un sistema S ! , di risultante
r! e momento risultante m! (O), si dice equilibrante del sistema S se risulta:
r! = −r ,
Sistemi equivalenti
r = r! ,
Fig. 2.4
O∈E.
(2.6)
19
A. A. 2009-2010
m! (O) = −m(O) .
(2.7)
Si osservi come, in tal caso, il sistema unione S è equilibrato.
Sulla base delle definizioni di equivalenza tra sistemi di vettori, è possibile
dimostrare le seguenti proposizioni.
Proposizione. 2.1. Un sistema S di vettori applicati è equivalente ad una
coppia se e solo se ha risultante nulla.
Dimostrazione.
⇐) Sia S un sistema per cui si abbia r = 0 e m $= 0. Scelto un generico vettore
u perpendicolare ad m ed un piano π perpendicolare ad m, siano A, B ∈ π e
tali che (figura 2.5)
A−B=
u×m
.
|u|2
Corso di Scienza delle Costruzioni
20
A. A. 2009-2010
2
Vettori applicati
2.4
Sistemi equivalenti
La coppia {(A, u), (B, −u)} ha risultante nulla e momento risultante
m(B) = (A − B) × u =
u×m
× u = m,
|u|2
2
Vettori applicati
2.5
Sistemi di vettori ad invariante scalare nullo
⇒) Se S è equivalente al vettore (Q, r), il momento risultante di S coincide
con il momento di (Q, r), quindi
m(Q) = (Q − Q) × r = 0 ,
dunque è equivalente ad S.
pertanto I = r · m(Q) = 0. !
Proposizione. 2.3. Un sistema S di vettori applicati a risultante r non nullo
è equivalente ad un sistema costituito da un vettore applicato (A, r) e da una
coppia di momento m(A) pari al momento risultante di S rispetto ad A.
Infatti, il sistema
{(A, r), coppia di momento m(A)} ,
che prende il nome di sistema equivalente ad S ridotto ad A, ha risultante r e
momento risultante rispetto ad A pari ad m(A), essendo nullo rispetto ad A
il momento di (A, r).
Fig. 2.5
⇒) Se S è equivalente ad una coppia, dalla definizione di equivalenza segue
r = 0. !
Proposizione. 2.2. Un sistema S di vettori applicati a risultante non nullo
è equivalente ad un unico vettore applicato se e solo se ha invariante scalare
nullo. In particolare il vettore equivalente (Q, r) è costituito dal risultante r
applicato ad un generico punto Q dell’asse centrale. Il vettore (Q, r) è detto
risultante equivalente.
Dimostrazione.
⇐) Se I = 0, detto Q un generico punto dell’asse centrale di S, il campo dei
momenti è descritto dall’equazione
Tale equazione coincide con quella del sistema costituito dal vettore (Q, r) che
ha quindi lo stesso momento risultante. Infine banalmente S e (Q, r) hanno
la stessa risultante, per cui i due sistemi sono equivalenti.
21
Sistemi di vettori ad invariante scalare nullo
Di seguito si illustrano alcuni esempi particolarmente significativi di sistemi
di vettori ad invariante scalare nullo.
2.5.1
Sistemi di vettori applicati concorrenti
Si consideri un sistema di vettori applicati concorrenti, ossia un sistema di
vettori le cui rette d’azione sono concorrenti in un unico punto O (figura 2.6).
Risulta
m(O) =
n
!
(Ai − O) × ui = 0 ,
(2.8)
i=1
m(O) = p + r × (O − Q) = (O − Q) × r .
Corso di Scienza delle Costruzioni
2.5
A. A. 2009-2010
dunque I = m(O)·r = 0. Un sistema cosı̀ fatto ammette risultante equivalente
(O, r). Se, in particolare, risulta r $= 0, dalla 2.8 si deduce che O appartiene
all’asse centrale.
Corso di Scienza delle Costruzioni
22
A. A. 2009-2010
2
Vettori applicati
2.5
Sistemi di vettori ad invariante scalare nullo
2
Vettori applicati
2.5
Fig. 2.6
2.5.2
Fig. 2.7
Sistemi piani di vettori applicati
2.5.3
Un sistema di vettori
è detto piano se tutti i vettori del sistema appartengono ad un unico piano π
(figura 2.7), cioè se
ui · e = 0 ,
r·e=
i=1
i = 1, . . . , n,
ui · e = 0 ;
m(O) × e =
n
!
i=1
ui = fi e ,
|e| = 1 ,
i = 1, . . . , n .
Per un sistema di questo tipo si ha:
n
!
fi e = f e ,
f=
n
!
fi
& n
'
n
!
!
m(O) =
(Ai − O) × fi e =
fi (Ai − O) × e ,
i=1
i=1
i=1
i=1
⇒ I = r · m(O) = 0 .
Pertanto i sistemi di vettori paralleli ammettono, per f $= 0, un risultante
equivalente. Se al contrario f = 0, il sistema è equivalente ad una coppia.
[(Ai − O) × ui ] × e = 0 .
Pertanto I = r · m(O) = 0 e quindi, se il risultante è non nullo, un sistema
piano ammette sempre risultante equivalente. Se invece r = 0, il sistema è
equivalente ad una coppia giacente nel piano π.
Corso di Scienza delle Costruzioni
S = {(A1 , u1 ), . . . , (An , un )} ,
r=
essendo e un versore perpendicolare a π.
In tal caso, il risultante è parellelo a π ed il momento risultante rispetto
ad un polo O ∈ π è perpendicolare a π. Infatti risulta:
n
!
Sistemi di vettori applicati paralleli
Un sistema di vettori applicati paralleli è un sistema del tipo
S = {(A1 , u1 ), . . . , (An , un )}
Ai ∈ π ,
Sistemi di vettori ad invariante scalare nullo
23
A. A. 2009-2010
Definizione. 2.9. Si definisce centro di un sistema di vettori paralleli a
risultante non nullo il punto C ∈ E tale che
f (C − O) =
n
!
i=1
fi (Ai − O) ,
Corso di Scienza delle Costruzioni
24
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
dove O è un punto generico.
Si osservi che la definizione di centro è indipendente dal punto O. Infatti, preso un punto O! $= O, sia C! il centro definito secondo l’espressione
precedente. Si ha:
f (C! − O! ) =
n
!
i=1
fi (Ai − O! ) =
n
!
i=1
fi (Ai − O) +
n
!
i=1
fi (O − O! ) =
2
Vettori applicati
2.6
Costruzioni grafiche
e si supponga che r = u1 + u2 + u3 $= 0. Si costruisca il poligono dei vettori
O1 , O2 , O3 O4 , che per le ipotesi fatte sarà aperto, a partire dal punto generico
O1 . In particolare, il segmento orientato O4 − O1 rappresenta, nella scala di
rappresentazione adottata per i vettori, il risultante r. Si scelga ora un punto
P del piano non appartenente ad alcun lato del poligono dei vettori e siano
p1 , p2 , p3 , p4 le rette del fascio di centro P passanti per i punti O1 , O2 , O3 O4 .
Il punto P è detto polo e le rette p1 , p2 , p3 , p4 raggi proiettanti.
= f (C − O) + f (O − O! ) = f (C − O! ) ,
da cui segue la coincidenza tra C e C! .
Proposizione. 2.4. Per ogni sistema di vettori applicati paralleli
S = {(Ai , fi e), |i = 1, . . . , n} ,
il centro C appartiene all’asse centrale qualunque sia il versore e.
Dimostrazione.
Il momento risultante di S rispetto al polo C risulta
& n
'
n
!
!
(Ai − C) × fi e =
fi (Ai − C) × e = f (C − C) × e = 0 ,
m(C) =
i=1
i=1
dunque C appartiene all’asse centrale. !
Il risultato appena esposto mostra che se si ruotano tutti i vettori fi e allo
stesso modo (cioè si varia la direzione di e), l’asse centrale ruota intorno a C.
Fig. 2.8
2.6
2.6.1
Costruzioni grafiche
Poligono funicolare
La costruzione del poligono funicolare consente di determinare graficamente
l’asse centrale di un sistema piano di vettori e, in particolare, il risultante
equivalente.
Si consideri il caso particolare di un sistema costituito da tre vettori (figura
2.8):
S = {(A1 , u1 ), (A2 , u3 ), (A3 , u3 )} ,
Corso di Scienza delle Costruzioni
25
A. A. 2009-2010
A partire da un generico punto B0 del piano si costruisca ora la poligonale
avente i lati s1 , s2 , s3 , s4 ordinatamente paralleli ai lati p1 , p2 , p3 , p4 e i vertici
B1 , B2 , B3 sulle rette d’azione r1 , r2 , r3 del sistema di forze. La poligonale cosı̀
ottenuta è detta poligono funicolare connesso al sistema S. Si osservi che dalle
ipotesi fatte segue che O1 $= O4 , cosicché s1 non è parallela ad s4 .
Si può dimostrare che il punto Q di intersezione dei lati s1 e s4 è un punto
dell’asse centrale; in particolare, l’asse centrale è la retta per Q parallela al
segmento O4 O1 ed il vettore (Q, r) è equivalente al sistema S. Il procedimento
Corso di Scienza delle Costruzioni
26
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
2
Vettori applicati
2.6
Costruzioni grafiche
mostrato si può estendere facilmente a sistemi costituiti da un numero qualsiasi
di vettori.
Nel caso particolare in cui r = 0 e m $= 0 (figura 2.9), il poligono dei vettori
è chiuso, dunque il primo e l’ultimo lato del poligono funicolare sono tra loro
paralleli. Il sitema non ammette risultante equivalente, ma è equivalente ad
una coppia. Si può dimostrare che una coppia equivalente è costituita dai
vettori (B1 , u!1 ) e (B3 , u!!3 ), con u!1 e u!!3 ottenuti scomponendo rispettivamente
u1 rispetto alle direzioni s1 ed s2 , e u3 rispetto ad s3 e s4 ≡ s1 .1 Infatti è
facile verificare che
u!1 = P − O1 = −O4 − P = −u!!3
Fig. 2.10
2.6.2
Decomposizione di un vettore nel piano
Decomporre un vettore vuol dire determinare un sistema di vettori equivalente
al vettore assegnato.
Decomposizione di un vettore secondo due rette.
Fig. 2.9
Si consideri infine il caso in cui r = 0 e m = 0. L’equazione r = 0
è equivalente, dal punto di vista grafico, alla condizione che il poligono dei
vettori sia chiuso. Inoltre, poiché m = 0, si ha che anche il poligono funicolare
è chiuso: il primo lato coincide con l’ultimo, cosicché i due vettori (B1 , u!1 ) e
(B3 , u!!3 ) formano una coppia di braccio nullo (figura 2.10):
u!1 = P − O1 = −O4 − P = −u!!3 .
1
Per una discussione sulla scomposizione di un vettore si veda il paragrafo 2.6.2.
Corso di Scienza delle Costruzioni
27
A. A. 2009-2010
Si considerino un vettore (A, u) e due rette r1 , r2 non parallele. Si osservi
che se la retta d’azione r di (A, u) non appartiene al fascio individuato da r1 e
r2 , il problema non ha soluzione. Infatti in tal caso il momento dei due vettori
giacenti su r1 e r2 rispetto ad O è nullo, mentre non lo è il momento di (A, u).
Se al contrario O ∈ r (figura 2.11), il problema ha la seguente soluzione:
{(O, v1 ), (O, v2 )} ,
dove v1 e v2 sono i vettori che si ottengono costruendo il parallelogramma
avente per diagonale u e i lati giacenti su r1 e r2 . Tale soluzione è unica.
Se le rette r1 , r2 sono parallele, il problema ha soluzione solo se esse hanno
la direzione di u. In tal caso la soluzione è unica e può ottenersi come segue.
Corso di Scienza delle Costruzioni
28
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
2
Vettori applicati
2.6
Costruzioni grafiche
Fig. 2.11
Si determini dapprima il sistema S ! = {(A1 , v1 ), (A2 , v2 )} equilibrante
di (A, u) e con vettori aventi retta d’azione coincidenti con r1 e r2 . S ! può
ottenersi costruendo un poligono funicolare chiuso (figura 2.12). In particolare,
dal poligono dei vettori conosciamo il primo lato (coincidente con l’ultimo) ed
il secondo. Restano quindi determinati i punti B2 e B3 e di conseguenza il
terzo lato del poligono costituito dal segmento B2 B3 . Infine mandando da P
il raggio proiettante parallelo al segmento B2 B3 si determina O2 . I vettori
cercati sono quindi v1 = O3 − O2 e v2 = O4 − O3 .
A questo punto, se S ! è equilibrante di (A, u) ha risultante pari a −u e
momento risultante opposto a quello di (A, u). Pertanto la soluzione cercata
è la seguente:
Fig. 2.12
{(A1 , −v1 ), (A2 , −v2 )} ,
dove A1 e A2 sono due punti scelti arbitrariamente rispettivamente su r1 e r2 .
Fig. 2.13
Decomposizione di un vettore secondo tre rette assegnate r1 , r2 , r3 .
Se le tre rette formano un fascio (proprio o improprio), il problema ammette infinite soluzioni. Consideriamo ad esempio il caso in cui le rette r1 , r2 , r3 e
r siano concorrenti (figura 2.13). Scelto su r1 un vettore arbitrario (A1 , v1 ), si
determinano i rimanenti vettori (A2 , v2 ) e (A3 , v3 ) su r2 e r3 decomponendo
il vettore u − v1 lungo r2 e r3 .
Nel caso in cui r1 , r2 , r3 non formano fascio, il problema ha una sola soluzione. Decomponendo u rispetto alle direzioni r3 e BC (figura 2.14) si ottengono
Corso di Scienza delle Costruzioni
29
A. A. 2009-2010
rispettivamente i vettori v3 e w. Dalla decomposizione di w lungo r1 e r2 si
ottengono i vettori v1 e v2 .
2.6.3
Riduzione di sistemi piani di forze e criteri di equivalenza a
zero
Si illustrano nel seguito alcune costruzioni grafiche finalizzate a ridurre i sistemi piani di forze a sistemi equivalenti costituiti da una sola forza e/o da una
Corso di Scienza delle Costruzioni
30
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
2
Vettori applicati
2.6
Costruzioni grafiche
Fig. 2.15
Si consideri un sistema piano del tipo
S = {(P1 , u1 ), (P2 , u2 )} .
Fig. 2.14
sola coppia. In particolare si ricorda che nel caso piano (I = 0) se r $= 0 il
sistema è equivalente ad una forza, se r = 0 il sistema è equivalente ad una
coppia.
Sistemi costituiti da un solo vettore.
Un sistema del tipo S = {(P, u)} ha banalmente risultante non nullo. In
virtù della proposizione 2.3, tale sistema è equivalente al sistema
Si supponga che le rette d’azione r1 , r2 non siano parallele (figura 2.16). In
tal caso si ha r $= 0 e, detto O il punto di intersezione di r1 ed r2 , m(O) = 0.
Il sistema equivalente è
S ! = {(O, r)} ,
infatti i due sistemi hanno lo stesso risultante e, in virtù della formula di
trasposizione dei momenti, hanno lo stesso momento risultante rispetto a
qualunque polo.
S ! = {(P! , u); m(P! )} ,
ove m(P! ) = (P − P! ) × u è il momento risultante del primo sistema S rispetto
al punto P! (figura 2.15). Infatti risulta:
r=u
r! = u = r
m(P) = 0
m! (P) = (P! − P) × u + m(P! ) = 0 = m(P) .
Questa operazione prende il nome di riduzione di (P, u) al punto P! e m(P)
prende il nome di momento di trasporto.
Sistemi piani costituiti da due vettori.
Corso di Scienza delle Costruzioni
31
A. A. 2009-2010
Fig. 2.16
Se le rette d’azione r1 , r2 sono parallele può aversi r = 0 o r $= 0. Nel
primo caso (figura 2.17) il sistema è equivalente ad una coppia di momento
m = ±b|u|e, essendo e il versore perpendicolare al piano individuato da r1 ed
Corso di Scienza delle Costruzioni
32
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
r2 , ed è indipendente dal polo scelto (si veda il paragrafo 2.2 e la proposizione
2.1). Se le due rette d’azione sono coincidenti, si ha b = 0, per cui il sistema è
equilibrato. Se r $= 0, è possibile determinare il risultante equivalente mediante
2
Vettori applicati
2.6
Costruzioni grafiche
due vettori agenti sulla stessa retta d’azione e aventi stesso modulo e verso
opposto.
Sistemi piani costituiti da tre vettori.
Un sistema di tre vettori (figura 2.19)
S = {(P1 , u1 ), (P2 , u2 ), (P3 , u3 )}
è sempre riconducibile ad un sistema di due vettori
Fig. 2.17
la costruzione del poligono funicolare (figura 2.18). Determinata la risultante r
mediante il poligono dei vettori, si individuano a partire da un punto arbitrario
P le direzioni p1 , p2 , p3 . Condotta da un punto arbitrario B0 la retta s1 ' p1 ,
si determina B1 su r1 e tramite s2 ' p2 , si trova B2 su r2 . Condotta da B2 la
retta s3 ' p3 , la retta d’azione r del risultante equivalente è la parallela a r1
e r2 passante per il punto B3 di intersezione di s1 e s3 . È facile provare che
|r| = |v2 |b2 /b1 .
Alla luce di quanto visto, è possibile dunque enunciare il criterio di equivalenza a zero per un sistema piano di due vettori.
Proposizione. 2.5. Un sistema piano di due vettori è equivalente a zero
se e solo se è costituito da una coppia di braccio nullo, cioé se è formato da
33
essendo (P, u12 ) il risultante equivalente del sistema di due vettori
S12 = {(P1 , u1 ), (P2 , u2 )} .
Al sistema S ! si applicano le considerazioni fatte prima, e per esso si può quindi
individuare facilmente il vettore (O, r) equivalente al sistema di partenza S.
Fig. 2.19
Fig. 2.18
Corso di Scienza delle Costruzioni
S ! = {(P, u12 ), (P3 , u3 )} ,
A. A. 2009-2010
È possibile in particolare determinare per tali sistemi un criterio di equivalenza a zero. Perché si abbia r = 0, il poligono delle forze deve essere chiuso.
Per quanto riguarda la condizione di annullamento del momento risultante,
osservando la figura 2.19 si vede che
m(P) = (P3 − P) × u3 .
Corso di Scienza delle Costruzioni
34
A. A. 2009-2010
2
Vettori applicati
2.6
Costruzioni grafiche
Tale momento risultante è dunque nullo se (P3 − P) = 0, cioé se la retta d’azione di u3 passa per P. In definitiva si può enunciare il criterio di equivalenza
a zero per un sistema piano di tre vettori come segue.
Proposizione. 2.6. Un sistema piano di tre vettori è equivalente a zero se
e solo se il poligono dei vettori è chiuso e le rette d’azione dei vettori sono
concorrenti in un unico punto.
Si osservi che, nel caso in cui le rette d’azione siano concorrenti in un punto
improprio (sistema di vettori paralleli), la condizione espressa dalla precedente
proposizione è solo necessaria.
Sistemi piani costituiti da più di tre vettori.
Per sistemi di questo tipo, è sempre possibile ricondursi a sistemi formati
da tre o due vettori combinando due a due i vettori del sistema. Per questi
valgono quindi le considerazioni fatte in precedenza.
Corso di Scienza delle Costruzioni
35
A. A. 2009-2010
Scarica