Cinematica
Determinazione del moto – 1 dimensione
v
t
d
a v dv adt dv adt
dt
v
t
0
0
t
v v 0 adt
t0
a0
v v0 cost
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
a cost
v v 0 at
Capitolo 2 Cinematica
1
1
Cinematica
Determinazione del moto – 1 dimensione
x
t
d
v x dx vdt dx vdt
dt
x
t
0
v0
x x0 cost
1 2
1+2 x x0 v0 t at
2
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
0
v cost
x x0 v 0 t
2
Moto uniformemente accelerato
Capitolo 2 Cinematica
2
Moto nel piano
Cinematica
y
x r cos
y r sin
P
r
r t
x
O
x2 y2
y
tan
x
vettore OP
r t OP x( t )uˆ x y( t )uˆ y
û y
uˆ vettore unitario versore
û x
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
3
Determinazione del moto – 1 dimensione
Cinematica
r t
r
r t t
d
v r
dt
r ( t t ) r ( t )
v lim
t
t 0
velocità
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
4
Determinazione del moto – 1 dimensione
Cinematica
La velocità è sempre tangente alla traiettoria
r
S
dr
ds
dr ds uˆ t
d
v s uˆ t
dt
uˆ t versore tangente alla traiettori a
in coordinate cartesiane
d
d
d d
v r ( xuˆ x yuˆ y ) ( x )uˆ x ( y )uˆ y v x uˆ x v y uˆ y
dt
dt
dt
dt
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
5
Cinematica
Determinazione del moto – 2 dimensioni
dv adt v v 0 at
Il vettore velocità è sempre nel
piano individuato dai vettori
costanti v 0 e a
{
v x v0 x a x t
v y v0 y a y t
1
dr vdt r r0 v0 t at 2
2
Proiezione del moto in due dimensioni
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
{
1
x x0 v 0 x t a x t 2
2
1
y y0 v 0 y t a y t 2
2
Capitolo 2 Cinematica
6
Moto parabolico
Cinematica
a g guˆ u
g
y
v0
x
Moto lungo x
x v0 cos t
condizioni iniziali
x0 0
r0 0
y0 0
v 0 x v cos
v0
v 0 y v sin
v x cost v0 cos
Moto lungo y
1
y (v 0 sin )t gt 2
2
v y v 0 sin gt
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
y( x ) x tan
g
2v02 cos 2
x2
Parabola!
Capitolo 2 Cinematica
7
Moto parabolico
Cinematica
v0
o
Gittata : y 0
xM
v0
Altezza massima
v 02 sin 2
y( x M )
2g
Tempo di volo
2xM
2 x M 2v 0 sin
tG
v 0 cos
vx
g
tG tempo di salita
2
tG tempo di discesa
2v 02 cos sin 2v 02 sin( 2 )
xG
g
g
v 02 cos sin
x M xG
g
2
Angolo per cui si
ottiene la gittata massima
d
xG 0 45
d
v 02
se 45 xG
g
2
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
8
Colpisci un bersaglio
Cinematica
y
v0
y0
Lanciamo un proiettile con velocità v 0 orizzontale.
Vogliamo colpire il punto x0
x0
x0 v 0 t v 0
x
2 y0
1
y y0 v 0 y t gt 2 t
2
g
0
x0
2v02
tan
y0
gy0
2 y0
g
Bisogna lanciare il proiettile
quando l’angolo è
2v 2
0
arctan
gy0
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
9
Colpisci un bersaglio
Cinematica
P( x 0 , y0 )
v0
Proiettile
Bersaglio
1 2
1 2
y1 v oy t gt
y 2 y0 gt
2
2
y1 y2
y0
1 2
1 2
v0 y t gt y0 gt t
2
2
v0 y
nel tempo :
y
v
t 0 ; x1 v0 x t 0 x y0 ; x 2 x0
v0 y
v0 y
v0 x
v 0 x x0
se imponiamo x1 x2
y0 x 0
v0 y
v 0 y y0
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
10
Coordinate polari
Cinematica
ûT
r
In questo caso r r uˆ N
d d
d
v r r uˆ N r uˆ N
dt
dt
dt
û N
o
Derivata di un versore!
d
d
v r uˆ N r uˆT
dt
dt
Componente normale
Componente tangenziale
(Velocità radiale)
(Velocità trasversale)
vT
r
Modulo della velocità
vN
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
2
d
d
d
v s r r2
dt
dt
dt
Capitolo 2 Cinematica
11
2
Accelerazione nel moto piano
Cinematica
ûT
d d2
a v 2r
dt
dt
ûT
û N
d
scriviamo la velocità come v v uˆT
uˆ t varia nel tempo
d
d
d
ˆ
ˆ
a
vuT v uT v uˆT
dt
dt
dt
û N
Derivata di un versore!
d
d
a v uˆT v uˆ N
dt
dt
aT
aN
v2
d
a v uˆT
uˆ N
dt
R
aT
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
aN
2
a aT2 a N
Capitolo 2 Cinematica
12
Derivata di un versore
Cinematica
S
uˆ uˆ ( t t ) uˆ ( t )
(oppure t 0)
û
duˆ
ût ût
S uˆ
ma dS duˆ
uˆ duˆ
duˆ uˆ
da cui
dS uˆ d
duˆ uˆ d
duˆ d
1
d
d
uˆ
dt
dt
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
13
Accelerazione centripeta o normale
Cinematica
aT
d
d
a v uˆT v uˆ N
dt
dt
aN
ûT
Per una circonferenza
di raggio R…
dS
û N
d
ûT
û N
d
d d
1
s v
dt
ds dt
R
da cui
aN
v2
uˆ N
R
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
14
Moto circolare uniforme
Cinematica
v
v2
d
a v uˆT
uˆ N
dt
R
v v x uˆ x v y uˆ y v ( v sin )uˆ x (v cos )uˆ y
aN
v
aN
v
v
yP
P
vx
yP
R
xP
cos
R
sin
vy
v yP
v xP
v (
)uˆ x (
)uˆ y
R
R
xP
v d
v d
d
ˆ
a v
yP ux
x P uˆ y
dt
R dt
R dt
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
15
Moto circolare uniforme
Cinematica
v2
v 2
a cos uˆ x sin uˆ y
R
R
ax
a
ay
2
v
a a 2x a 2y
R
tan
ay
ax
tan
Il vettore a è diretto verso il centro
e vale v²/R in modulo
ûT
ûT
û N
Attenzione:
aN 0
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
û N
aN 0
Capitolo 2 Cinematica
16
Moto circolare – coordinate polari
Cinematica
S t t r
P
r
con r costante
t
S
d
1d
v
S
dt
r dt
r
a
d d2
1d
2
v T
dt dt
r dt
r
v r
aT r
Ricordiamo che in coordinate polari
d
d
v r uˆ r r uˆ
dt
dt
v r
0
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
Capitolo 2 Cinematica
17
Moto circolare – coordinate polari
Cinematica
x
v
a
aT r
aN
Moto circolare uniformemente
accelerato
1 2
t 0 0 t t
2
t 0 t
t cost
Politecnico di Bari, Laurea in Ingegneria Elettrica
Corso di Fisica Sperimentale I
Prof. G. Iaselli
aT
v2
2r
R
aN
Moto circolare uniforme
t 0 0 t
t 0
t 0
Capitolo 2 Cinematica
18
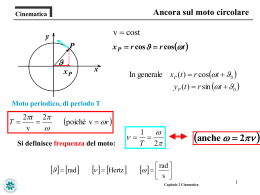
Ancora sul moto circolare
Cinematica
v cost
y
x P r cos r cos t
P
xP
x
In generale xP (t ) r cost 0
yP (t ) r sin t 0
Moto periodico, di periodo T
2r 2
T
v
poichè v r
Si definisce frequenza del moto:
rad
Hertz
1
T 2
anche 2
rad
s
Capitolo 2 Cinematica
19
Moti relativi – Traslazione
OO vt t
y
'
y
'
P
r
r'
O'
O
x
moto relativo uniforme
'
r r vt t
'
x
vt
'
dr '
v v vt
dt
'
v v vt
Trasformazione della velocità di Galilei
Se
v t cost
' d v
'
a
a a
dt
x ' x vt t
'
y y
t ' t
v x ' v x v t
'
v y v y
'
t t
Invarianza dell’accelerazione nel caso di moti relativi uniformi
20
Moti relativi – Traslazione
Sistema fisso
v
y
y
tan
v0
O
vt
O'
vy
vx
x'
vy
vy
tan
vx v x v t
In particolare se
y
'
v
'
x
O
'
Sistema in moto
y'
vt vx
x
v 0 cos
'
v
vt
x21'
Un altro esempio – Traslazione
Cinematica
y
v
y
O
Nel sistema di riferimento
in moto con velocità v
vt
'
O
y'
'
'
v
x
x'
Dalle trasformazioni di Galileo:
O'
x'
'
v v vt
'
v
x v t
'
v y v y v
v' v 2 v 2t
t
'
v
vt
v
vt
tan
v
22
Moti relativi – Traslazione con v ≠ cost
Cinematica
v t cost
' dv t
a a
dt
'
a a at
a t accelerazione di trascinamento
Esempio:
Nel sistema fisso il punto P è in quiete
y
O' a t
P
'
a a at
at
0
O
x
Nel sistema in moto accelerato P si
muove con un’accelerazione a t
23
Un altro esempio
Cinematica
Ascensore in caduta libera
x
O
O'
x'
Nel sistema fisso un oggetto nell’ascensore
“cade” con l’accelerazione g
Nel sistema in moto con accelerazione g:
g
at g
y'
y
'
a a at
'
a gg0
Nel sistema in movimento non si sente alcuna accelerazione!
(assenza di gravità)
Capitolo 2 Cinematica
24
Sempre da un sistema in caduta libera…
Cinematica
y
v0
Nel sistema in caduta libera
g
ay g
ax 0
at
x
O
'
a a at
a 0 v cost
'
x
'
x
a 0 v cost
'
y
y'
'
y
O'
a 'x a x 0
g
x'
a 'y a y a t g ( g ) 0
Traiettoria rettilinea
'
v
x v 0 cosα '
v v0
'
v y v 0sin α
25
Moto relativo di rotazione
Cinematica
cost
Supponiamo il punto P in moto con cost
nel sistema fisso
v r
P
In generale
'
v v r
Nel sistema in rotazione:
v' 0
oppure
v v' r
Nel sistema rotante non c’è accelerazione!
Nel sistema fisso il moto è accelerato!
Capitolo 2 Cinematica
26
e l’accelerazione?
Cinematica
'
v v r
d d ' d d
v v r dr
dt
dt
dt
dt
0
a a' r v ' r
a a ' 2 r r
accelerazione centripeta
accelerazione di Coriolis
Capitolo 2 Cinematica
27
Un caso semplice
Cinematica
Supponiamo il punto P si muova di moto uniforme nel sistema fisso
Nel sistema rotante
'
'
a 2 v r
O
P
Sistema fisso
v'
r
aT
P
P
'
a
2 v'
aN
Sistema rotante
a N 2r
aT 2 v 2 2 r 2
Capitolo 2 Cinematica
28
Scaricare