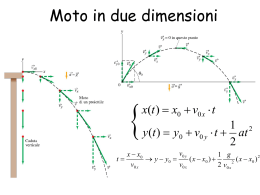
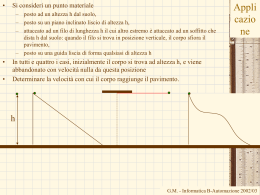
Velocità ed accelerazione • Abbiamo definito la veocità come dr v(t) dt a dv dt dx(t) vx dt dy(t) vy dt dz(t) vz dt v vut dv x d2 x ax 2 dt dt 2 dv y d2 y dv d r a 2 ay 2 dt dt dt dt 2 dvz d z az 2 dt dt G.M. - Informatica B-Automazione 2002/03 Un cannone lancia un proiettile con una velocità iniziale vo=60m/s ad un angolo di 60° rispetto all’orizzontale. Determinare, trascurando la resistenza dell’aria, la distanza dal punto di partenza del punto di atterraggio del proiettile (gittata). la velocità di impatto al suolo la durata del moto l’altezza massima raggiunta dal proiettile. il tempo impiegato per raggiungerla. il valore dell’angolo per il quale la gittata è massima ed il valore della gittata. la gittata quando l’angolo è di 30°. Appli cazio ne y • Introdurre il sistema di riferimento – – – – Asse x orizzontale Asse y verticale vo contenuta nel piano xy Origine nel punto di lancio vo 60° • Il corpo sarà soggetto all’accelerazione di gravità ax 0 Condizioni iniziali ag a y g az 0 x xo 0 v xo vo cos yo 0 zo 0 v yo vo sen vzo 0 G.M. - Informatica B-Automazione 2002/03 d2 x 0 dt 2 d2y 2 g dt d 2z 2 0 dt xo 0 v xo vo cos yo 0 zo 0 v yo vo sen vzo 0 x(t) vo cos o t vx v o cos o y(t) vo sen o t 12 gt 2 vy v osino gt z(t) 0 vz 0 moto uniforme moto uniformemente accelerato moto uniforme • Il moto avviene nel piano xy • Le equazioni parametriche della traiettoria: x(t) v o cos o t y(t) v o sen o t 12 gt 2 Per ottenere l’equazione della traiettoria y(x) bisogna eliminare il tempo y Appli cazio ne vo 60° x x t vo cos o x x2 1 y(t) v o sen o 2g 2 v o cos o v o cos2 o G.M. - Informatica B-Automazione 2002/03 y(t) x tan o x 2 g 2 2 2v o cos o del tipo y(t) ax bx 2 Appli cazio ne una parabola passante per l' origine! G.M. - Informatica B-Automazione 2002/03 la distanza dal punto di partenza del punto di atterraggio del proiettile (gittata). 1 x 0 xtan o g 2 2 2 v o cos o 2v2o sen o cos o G x2 x1 g x1 0 tan o 2v2o cos 2 o 2v2o cos2 o sen o x2 g g cos o Appli cazio ne 2v 2o sen o cos o g y(t) x tan o x 2 g 2v2 o cos2 o v2o sen 2 o G 317.8m g G è massima quando sen2o è massimo: 2o=90° o=45° y0 G.M. - Informatica B-Automazione 2002/03 Appli cazio ne La durata del moto Troviamo gli istanti di tempo in cui il proiettile è al suolo y=0 1 y 0 0 t v osino gt 2 t1 = 0 2v sino t2 = o g 2vo sen o D t 2 t1 g D 10.59s La velocità all’impatto t=t2 y(t) v osin ot v x vo cos o v y vosin o g vz 0 x(t) v o cos ot 2vosin o vosin o g La componente y della velocità ha cambiato di segno Il modulo della velocità di impatto è vo z(t) 0 1 2 gt 2 vx v o cos o vy v osino gt vz 0 y0 G.M. - Informatica B-Automazione 2002/03 l’altezza massima raggiunta dal proiettile ed il tempo necessario per raggiungerla. Quando il punto si trova nel punto più alto della traiettoria vy=0 v y vosin o gt vy 0 0 vosin o gt t3 v osino g Appli cazio ne v2o sen o cos o x max 158.9 m g 1 v2o sen2 o y max 137.6 m 2 g La gittata massima v2o sen 2 o G g 2 v G max o 366.9m g x(t) v o cos ot y(t) v osin ot z(t) 0 1 2 gt 2 vx v o cos o vy v osino gt vz 0 vy 0 La gittata per o=30° v2o sen 2 o v2o sen 60 G 317.8 g g G.M. - Informatica B-Automazione 2002/03 Moto del proiettile Appli cazio ne G.M. - Informatica B-Automazione 2002/03 La velocità angolare • Supponiamo che il punto materiale si muova con velocità costante sulla retta x=a • L’angolo formato dal vettore posizione con l’asse delle x varia nel tempo • ci possiamo calcolare la velocità angolare vo D D m Dt lim Dt0 y media D Dt istantanea a (t) x d(t) dt • Se varia nel tempo ci possiamo calcolare l’accelerazione angolare D m Dt media D d lim Dt 0 Dt dt t istantanea d(t) d 2(t) (t) dt dt 2 G.M. - Informatica B-Automazione 2002/03 L’accelerazione riferita alla traiettoria • Partendo dalla velocità riferita alla traiettoria • Ci calcoliamo l’accelerazione v vut dv dvu t a dt dt dvut dv du t a ut v dt dt dt Accelerazione tangenziale fa cambiare il modulo della velocità ? Per valutare la seconda componente studiamo un moto in cui varia la direzione della velocità ma non il suo modulo: il moto circolare uniforme G.M. - Informatica B-Automazione 2002/03 Il moto circolare • Il punto P percorre una traiettoria circolare r costante Asse y y O r x • Il modulo di r è costante. Ds x r cos y r sen Asse x Ds r v r G.M. - Informatica B-Automazione 2002/03 Moto circolare uniforme • La traiettoria è una circonferenza ed il modulo della velocità è costante. Dv Asse y v(t+Dt) v(t) r(t+ Dt) DQ O r(t) v(t) v(t+Dt) DQ Sono uguali Asse x • Come appare dal disegno la velocità (come vettore) non è costante. G.M. - Informatica B-Automazione 2002/03 Accelerazione nel moto circolare uniforme • L’accelerazione media nell’intervallo Dt è: Dv am Dt Vettore che ha la direzione ed il verso di Dv. (Dt >0) Dv v(t) v(t+Dt) DQ • L’accelerazione all’istante di tempo t si ottiene facendo il limite dell’accelerazione media per Dt che tende a zero. Dv dv a lim Dt 0 Dt dt t G.M. - Informatica B-Automazione 2002/03 Accelerazione nel moto circolare uniforme Dv v(t) v(t+Dt) • Direzione e verso DQ – Quando Dt tende a zero anche DQ tende a zero – Poiché la somma degli angoli interni in un triangolo è sempre 180, se DQ tende a zero, gli angoli alla base tendono a 90°. (Il triangolo è isoscele) – L’accelerazione è perpendicolare a v(t) – Poiché v(t) è tangente alla circonferenza, l’accelerazione è radiale diretta verso il centro (accelerazione centripeta) G.M. - Informatica B-Automazione 2002/03 Accelerazione nel moto circolare uniforme • modulo Asse y Ds r(t+ Dt) Dr DQ r(t) O a lim Dt0 Dv Dt a lim Dt0 Dv v(t) v(t+Dt) DQ Asse x Poiché i due triangoli isoscele della figura sono simili (hanno lo stesso angolo al vertice) Dv Dr v r Dv v Dr v Ds v 2 lim Dt0 lim Dt 0 Dt r Dt r Dt r G.M. - Informatica B-Automazione 2002/03 Accelerazione nel moto su traiettoria non rettilinea • Abbiamo trovato che nel moto circolare uniforme (velocità costante in modulo) c’è solo l’accelerazione centripeta. • Se il modulo della velocità non è costante ci sarà: – L’accelerazione normale (centripeta) an • responsabile del cambiamento della direzione della velocità – L’accelerazione tangenziale at • • responsabile del cambiamento del modulo Ogni volta che un punto materiale si muove su una traiettoria curva (la velocità cambia direzione) c’è un’accelerazione centripeta, a a t a n a t u t a n un v2 an r un r = raggio di curvatura della traiettoria versore normale, direttor verso il centro di curvatura della traiettoria G.M. - Informatica B-Automazione 2002/03 Problema • Un’automobile di 1000 Kg affronta una curva avente un raggio di 40 m alla velocità di 36 km/h. Determinare il valore dell’accelerazione centripeta. v 36 km 1000m m 36 10 h 3600s s a v2 100 a 2,5 m 2 s r 40 G.M. - Informatica B-Automazione 2002/03 Il moto circolare uniforme ed il moto armonico v2 a ur r v r 2 r 2 a u r 2 rur 2 r r Asse y a 2 r y O a r x Ds Asse x d 2x 2 x 2 dt d (t) o t dt a x 2 x a y 2 y d2y 2 y 2 dt x r cos r cost y r sen r sent G.M. - Informatica B-Automazione 2002/03 La lancetta dei minuti di un orologio misura 12.0 cm dal suo perno all’estremità libera. Qual è lo spostamento della sua estremità A) da 15 a 30 minuti B) nella successiva mezzora C) nella successiva ora D) calcolare la velocità angolare media ed istantanea E) calcolare la velocità media nel caso A F) il modulo della velocità istantanea e dell’accelerazione. r1 i r3 j r2 j Dr1 r2 r1 j i Dr2 r3 r2 j j 2 j modulo 2 Dr3 r3 r3 0 modulo 2 modulo 0 m 2 15 60 m 1.74 10 3 Appli cazio ne rad s m s Dr j i 2 8 m v1 1 a 2 1.74 2 106 rad 12 10 m 36.33 10 s Dt Dt s2 2 1.41 12 10 2 m modulo 0.0188 10 2 Dt 15 60 s v 1.74 10 3 rad s 12 10 2 m 20.88 10 5 G.M. - Informatica B-Automazione 2002/03
Scaricare