G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
1 di 12
SISTEMI DI INDUTTORI
2.1 INDUTTORI
Gli insiemi di induttori sono un argomento particolarmente importante, ciò ne giustifica
una trattazione approfondita e di carattere quanto più generale possibile.
Consideriamo un sistema elettromeccanico costituito da un insieme di K induttori ideali
con mutui accoppiamenti e morsetti accessibili (Fig. 2.1). Per semplicità consideriamo una
unica coordinata meccanica y (la generalizzazione a più coordinate meccaniche è immediata,
come apparirà dalle formule). Salvo diverso avviso, nella trattazione generale che segue si
considera la variabile y come coordinata di posizione, posizione angolare, deformazione o
altro (ma non di velocità o velocità angolare), tale che il proprio differenziale dia luogo a
lavoro meccanico. Tale condizione è indispensabile per ottenere le espressioni generali delle
forze o delle coppie che saranno discusse in seguito.
Le due espressioni più significative di lavoro meccanico uscente sono:
a) lavoro meccanico, per uno spostamento elementare dy
δLm = F y dy
dove Fy è la componente nella direzione e nel verso positivo di y della forza del sistema
sull'esterno;
b) lavoro meccanico, nel caso di spostamento angolare (rotazione) dθ
δLm = C θ dθ
dove Cθ è la componente nella direzione e nel verso positivo di θ della coppia del sistema
sull'esterno.
Fig. 2.1
Va subito osservato che:
- le resistenze, necessariamente presenti in una rete, sono considerate fuori dal sistema;
- un sistema senza il termine meccanico, cioè geometricamente invariante, è chiaramente
un caso particolare della trattazione che ora sarà sviluppata.
- non si perde di generalità considerando tutti gli induttori a morsetti accessibili, che quindi
costituiscono le porte (elettriche) del sistema.
E' noto che nei sistemi di induttori si possono avere relazioni di proporzionalità fra flussi
concatenati e correnti, oppure relazioni non lineari (saturazione). Nel primo caso si parla
usualmente di induttore lineare o di sistema di induttori lineari, in cui le induttanze (o le
induttanze inverse) costituiscono i coefficienti di proporzionalità. Va osservato che tali
induttanze sono in generale funzioni (genericamente non lineari) delle v. di s. meccaniche.
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
2 di 12
Pertanto la dizione 'induttori lineari' fa riferimento solo alla proporzionalità tra flussi e
correnti ed in presenza di variabili meccaniche non implica la linearità del sistema
elettromeccanico. Si noti quindi che un sistema di induttori lineari può dare luogo a un
sistema elettromeccanico non lineare, in quanto la linearità riguarda solo i legami flussicorrenti a geometria congelata.
L'ordine del sistema elettrico è K. Le v. di s. elettriche possono essere l'insieme delle
correnti, l'insieme dei flussi concatenati, oppure, più di rado, un insieme misto di flussi e
correnti (purché si ottenga un numero di variabili indipendenti pari all'ordine della parte
elettrica del sistema).
Le relazioni saranno indicate sia in forma matriciale, sia esplicitate nei componenti scalari.
Se nel sistema si considera anche una equazione differenziale meccanica nella variabile y,
l’ordine del sistema elettromeccanico diviene N=K+1. La derivata
dy
prende il nome di
dt
velocità generalizzata.
2.2 CORRENTI COME VARIABILI DI STATO ELETTRICHE
Nel caso di non linearità delle induttanze, scelte ora le correnti come v. di s., i flussi
concatenati sono le funzioni di stato:
ψ = ψ (i, y)
ψ k = ψ k ( i1 ,.., i K , y )
k=1,..,K
(2.1)
Differenziando
∂ψ ( i , y )
∂ψ ( i , y )
∂ψ ( i , y )
di +
dy = Ld ( i , y ) di +
dy
∂y
∂i
∂y
∂ψ (i ,.., i K , y )
∂ψ k (i1 ,.., i K , y )
∂ψ k
dψ k = ∑h k 1
dih +
dy = ∑h Ldkh (i1 ,.., i K , y )dih +
dy
∂ih
∂y
∂y
(2.2)
dove si è definita la matrice quadrata di ordine K delle induttanze differenziali come lo
Jacobiano:
dψ =
∂ψ ( i , y )
∂i
∂ψ k ( i1 ,.., i K , y )
Ldkh ( i1 ,.., i K , y ) =
∂ih
Ld ( i , y ) =
k,h=1,..,K
(2.3)
Nel caso di dipendenze lineari tra flussi e correnti si è nel caso comune di induttori lineari.
La dipendenza dalla coordinata geometrica (il più delle volte non lineare) rimane nelle
induttanze. Si ha
ψ = L( y) i
k=1,..,K
(2.4)
ψ k = ∑h Lkh ( y )ih
Differenziando
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
3 di 12
dψ = L( y )di +
dψ k =
∑
dL( y )
idy
dy
(
)
L
y
di
+
kh
h
h
∑
dLkh ( y )
i h dy
h
dy
k=1,..,K
(2.5)
Le (2.2) permettono di scrivere le relazioni di Ohm ai morsetti elettrici. Nel caso generale
non lineare dalla legge dell'induzione:
dψ ∂ψ ( i , y ) di ∂ψ ( i , y ) dy
di ∂ψ ( i , y ) dy
=
+
= Ld ( i , y ) +
dt
∂i
∂y dt
dt
dt
∂y dt
dψ k
∂ψ (i ,.., i K , y ) dih ∂ψ k (i1 ,.., i K , y ) dy
di
∂ψ k dy
vk =
= ∑h k 1
+
= ∑h Ldkh (i1 ,.., i K , y ) h +
dt
∂ih
dt
∂y
dt
dt
∂y dt
k=1,..,K
(2.6)
v=
Nel caso di induttanze lineari (2.5):
v=
dψ
di dL( y ) dy
= L( y ) +
i
dt
dt
dy
dt
dψ k
=
vk =
dt
∑
di
L ( y ) h +
h kh
dt
∑
dLkh ( y ) dy
i h
h
dy
dt
k=1,..,K
(2.7)
Le (2.6) e (2.7) sono le equazioni di un sistema di mutui induttori tempo-varianti. Oltre
agli usuali termini nelle derivate delle correnti, è presente un contributo alla forza
elettromotrice proporzionale alla velocità meccanica dy/dt. Quest'ultimo termine dipende
dalla forma che assumono i parametri induttivi ed è proporzionale all'intensità delle correnti
(comunque non corrisponde energeticamente alla potenza meccanica).
Si consideri ora la energia. L'energia W(x) di un sistema (se esiste) è una particolare
funzione di stato le cui variazioni, per definizione, uguagliano il lavoro (in qualsiasi forma)
scambiato dal sistema con l'esterno. Con le convenzioni di segno normalmente assunte, lavoro
entrante corrisponde ad aumento di energia. Considerato un movimento dallo stato A (v. di s.
xA) allo stato B (v. di s. xB) e il lavoro totale L entrante nel sistema durante il movimento, si
formalizza la definizione di energia come
energia
W ( x B ) − W ( x A ) = LAB
o in forma differenziale dW=δL. L'energia è definibile quindi se, per ogni movimento del
sistema, il lavoro totale entrante dipende solo dagli estremi della traiettoria. Sistemi che
godono di tale proprietà si dicono conservativi.
Nel nostro caso l’energia è una funzione di stato W(i,y) espressa in funzione delle attuali v.
di s. Esplicitando il lavoro totale come differenza tra il lavoro elettrico entrante e il lavoro
meccanico uscente, in forma differenziale si ha
dW (i , y ) = δLe − δLm = i t vdt − F y dy = i t dψ − F y dy
(2.8)
Nell'ultima espressione della (2.8) si è tenuto conto della legge dell'induzione essendo gli
induttori ideali.
Si definisce ora una nuova funzione di stato, chiamata coenergia, come
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
4 di 12
coenergia
W ' = i t ψ − W = ∑k ik ψ k − W
k=1,..,K
(2.9)
La coenergia (2.9) è una funzione di stato perché funzione di funzioni di stato. La
definizione (2.9) è valida indipendentemente da quali variabili (flussi o correnti) sono scelte
come v. di s. elettriche. Il differenziale della coenergia rispetto alle attuali v. di s. è:
dW '( i , y ) =
∂W '( i , y )
∂W '( i , y )
di +
dy
∂i
∂y
(2.10)
D'altra parte differenziando la (2.9) e tenuto conto della (2.8) si ottiene:
dW ' ( i , y ) = i t dψ + ψ t di − dW = ψ t di + Fy dy
(2.11)
Sia la (2.10) che la (2.11) sono identità, cioè uguaglianze valide per qualsiasi valore delle
variabili indicate. L'uguaglianza tra le due identità impone l'uguaglianza tra i coefficienti, da
cui le seguenti identità notevoli:
∂W ' ( i1 ,.., i K , y )
∂W ' ( i , y )
ψt =
(2.12)
ψk =
∂i
∂i k
∂W '( i , y )
∂W ' (i , ϑ)
Fy =
(2.13)
Cϑ =
∂ϑ
∂y
La (2.12) indica che i flussi concatenati uguagliano le derivate della coenergia rispetto alle
corrispondenti correnti, derivate fatte mantenendo costanti le rimanenti correnti e la variabile
meccanica. La (2.12) ha la seguente importante applicazione: derivando la (2.12 scalare)
rispetto ad una corrente di indice differente e per la (2.3) risulta:
∂ 2W '(i1 ,.., i K , y )
Ldkh =
∂ih ∂i k
Per la indipendenza del risultato dall'ordine di derivazione segue l'uguaglianza delle mutue
induttanze differenziali ad indici scambiati:
Ldkh (i1 ,.., i K , y ) = Ldhk (i1 ,.., i K , y )
(2.14)
Da notare che l'uguaglianza sussiste se le due mutue induttanze differenziali sono valutate
in corrispondenza dello stesso stato del sistema (elettrico e meccanico). La (2.14) implica la
simmetria della matrice delle induttanze. Le (2.12-14) sono le condizioni di esistenza della
energia come funzione di stato.
Come caso particolare della (2.14) sono uguali anche le mutue induttanze del sistema
lineare (2.4), se valutate per lo stesso valore di y, cioè a geometria congelata:
Lkh ( y ) = Lhk ( y )
(2.15)
La (2.13) esprime la forza meccanica come derivata della coenergia rispetto allo
spostamento, derivata fatta a correnti costanti. Tale formula ha frequente applicazione per il
calcolo della forza, purché si abbia a disposizione una espressione esplicita della coenergia.
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
5 di 12
2.3 FLUSSI CONCATENATI COME VARIABILI DI STATO ELETTRICHE
Il sistema può essere sviluppato anche assumendo i flussi concatenati come v. di s.
elettriche. Le correnti sono ora le funzioni di stato:
i = i(ψ , y)
k=1,..,K
i k = i k ( ψ 1 ,.., ψ K , y )
(2.16)
Nel caso lineare:
i = L−1 ( y ) ψ = Γ ( y ) ψ
Γ ( y ) = L−1 ( y )
i k = ∑h Γkh ( y )ψ h
k=1,..,K
(2.17)
Le equazioni ai morsetti elettrici si riducono alla forma diretta e semplice
v=
dψ
dt
Le correnti (uscite del sistema dinamico) sono date dalle (2.16) o (2.17), che comprendono
la eventuale saturazione e la variabilità con y.
Si introduce ora la energia W(ψ,y) come funzione dei flussi e di y. Il differenziale
dell'energia ha la forma:
∂W ( ψ , y )
∂W ( ψ , y )
(2.18)
dψ +
dy
dW ( ψ , y ) =
∂ψ
∂y
Il confronto dell'identità (2.8) con l'identità (2.18) stabilisce le seguenti relazioni notevoli:
∂W ( ψ 1 ,.., ψ K , y )
∂W ( ψ , y )
ik =
it =
k=1,..,K
(2.19)
∂ψ
∂ψ k
∂W ( ψ , y )
∂W (i , ϑ)
Cϑ = −
Fy = −
(2.20)
∂ϑ
∂y
Per la (2.19) le correnti sono le derivate dell'energia rispetto ai corrispondenti flussi
concatenati. La (2.20) fornisce una espressione alternativa alla (2.13) per il calcolo della
forza, ottenuta ora derivando la energia rispetto allo spostamento, derivata fatta a flussi
concatenati costanti.
2.4 ENERGIA E FORZE
La determinazione di una espressione analitica dell'energia è importante sia per l'utilità
dell'energia stessa nei bilanci energetici, sia per ricavare espressioni della forza, direttamente
dalla (2.20) o attraverso la coenergia con la (2.13).
L'energia è determinabile, per l'espressione di definizione (2.8), dal lavoro scambiato per
portare il sistema dallo stato (di comodo) di energia nulla ad uno stato generico. Si cerca ora
di pervenire ad una espressione della energia in funzione di parametri significativi e che si
sappiano usualmente calcolare od esprimere in formule. Nella presente impostazione si
considerano tali i legami flussi-correnti (cioè le induttanze se lineari), mentre non è nota la
espressione della forza.
Lo stato di riferimento ad energia nulla sia caratterizzato dalle v. di s. ψ0, y0. Si pone
pertanto
W0 = W ( ψ 0 , y 0 ) = 0
(2.21)
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
6 di 12
Nel sistema in questione il lavoro scambiabile è elettrico e meccanico. Integrando la (2.8)
si ha:
ψ
W (ψ , y ) =
y
∫ i dψ − ∫ F dy
t
(2.22)
y
ψ0
y0
Per quanto detto, si vuole integrare la (2.22) ricorrendo al solo lavoro elettrico. Il valore
dell'energia non dipende dal percorso dallo stato di riferimento allo stato generico, quindi è
lecito scegliere un percorso (se esiste) che non implichi lavoro meccanico e, secondariamente,
sia facile da valutare. Si considera a tal fine prima il movimento dallo stato iniziale allo stato
ψ0, y, cioè si varia la sola coordinata meccanica fino al valore finale. Dalla (2.8), considerato
che i flussi sono mantenuti costanti, la variazione di energia è:
y
∫
W (ψ 0 , y ) − W (ψ 0 , y 0 ) = − F y (ψ 0 , y )dy
(2.23)
y0
Il precedente integrale è identicamente nullo se la forza è nulla per qualsiasi valore di y;
ciò è possibile se esiste un insieme di valori ψ 0 tali da avere forza nulla per qualsiasi
posizione: Fy ( ψ 0 , y ) = 0 . Fisicamente ogni azione meccanica dovuta al campo magnetico si
annulla se il campo è nullo ovunque. Negli usuali induttori, senza magnetismo residuo né
magneti permanenti, ciò è verificato per flussi nulli (che implicano correnti nulle). Pertanto
come stato di riferimento in questi casi va scelto necessariamente lo stato a flussi concatenati
nulli ( ψ 0=0) per ottenere un'espressione dell'energia non dipendente dalla forza meccanica.
Il secondo tratto da considerare porta il sistema nello stato finale con variazioni dei soli
flussi e a geometria congelata nello stato finale:
ψk
∫
t
W ( ψ , y ) − W ( ψ 0 , y ) = i ( ψ , y ) dψ =
0
∑ ∫ i(ψ ,.., ψ
k
1
k
, ψ 0 k +1 ,.., ψ 0 K , y )d ψ k
(2.24)
ψ0k
In conclusione, per l'assunto di energia nulla nello stato di riferimento e per quanto detto
sulla (2.23), l'energia ha l'espressione:
ψk
ψ
W=
∫ i ( ψ , y ) dψ = ∑ ∫ i
t
k
ψ 0 =0
k
ψ 0 k =0
(ψ 1 ,.., ψ k ,.., ψ 0 K , y )dψ k
(2.25)
A riepilogo del risultato ottenuto. Si fa l’ipotesi preliminare di conoscere un insieme di
valori ψ 0 tali che la forza sia nulla per ogni y. Si assume ad energia nulla lo stato ψ 0 e y0, con
y0 qualsiasi. Se non sono noti o non esistono i valori ψ 0, la procedura non è applicabile.
Si noti ancora che nella integrazione (2.25) y è una costante (geometria congelata al valore
attuale). Nella sommatoria (2.25) gli integrali possono essere eseguiti in successione. Ciò
significa fare variare le variabili di stato una per volta dal valore iniziale a quello finale.
Praticamente: nel calcolo del generico integrale k-esimo i flussi di indici inferiori a k (già
integrati) sono costanti ai valori finali, i flussi di indici superiori a k (non ancora integrati)
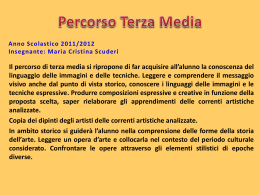
sono costanti ai valori iniziali nulli. Il percorso complessivo di integrazione dell'energia dallo
stato iniziale allo stato finale è mostrato in due casi in Fig. 2.2.
L'integrale (2.25) per induttori non lineari va sviluppato caso per caso. Nel caso di linearità
tra flussi e correnti, la (2.17) permette l'integrazione della (2.25)1 :
1
La correttezza dell'integrale matriciale si può verificare per mezzo della differenziazione
1
2
dell'espressione risultante: d ψ t Γψ =
[
]
1
(dψ )t Γψ + ψ t Γ (dψ ) = ψ t Γ (dψ )
2
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
7 di 12
ψ2
ψ2
ψ
ψ10 ψ20 y 0
ψ
ψ1
y
a)
y
ψ1
y
ψ0 y 0
y
b)
Fig. 2.2 a) due v. di s. b) tre v. di s.
ψ
1
∫ ψ Γ ( y ) dψ = 2 ψ Γ ( y ) ψ
t
W=
t
(2.26)
ψ 0 =0
Dalla (2.17) si ottengono le ulteriori espressioni dell'energia nel caso lineare:
W=
1
1
1 t −1
ψ L ( y ) ψ = ψ t i = i t L( y ) i
2
2
2
e in forma esplicita:
1
1
1
W = ∑ k ψ k i k = ∑ k ,h Lkh ( y )i k ih = ∑ k ,h Γkh ( y ) ψ k ψ h
2
2
2
(2.27)
(2.28)
Nota la energia, la coenergia si può ottenere da questa mediante la (2.9) oppure
direttamente integrando il differenziale esatto (2.11). Lo stato di riferimento ad energia nulla e
flussi nulli possiede anche coenergia nulla, per la (2.9).
W ' (0, y 0 ) = i 0t ψ 0 − W (0, y 0 ) = −W (0, y 0 )
In modo analogo all'energia, si integra la (2.11) dallo stato di riferimento allo stato
generico prima nella variabile y a correnti nulle, poi nelle correnti. Si ottiene:
ik
i
W'=
∫
ψ ( i , y ) t di =
i0 = 0
∑ ∫ψ
k
k
(i1 ,.., i k ,.., i0 K , y )di k
(2.29)
i0 k = 0
Nel caso di sistema di induttori lineari, la sostituzione della (2.4) nella (2.29) dà luogo a:
i
1
∫ i L( y)di = 2 i L( y)i
t
W'=
t
i0 = 0
=
1 t
i ψ
2
(2.30)
Il confronto delle (2.27) e (2.30) indica che nei sistemi a legami lineari flussi-correnti la
energia e la coenergia sono uguali W=W’ (mentre non è vero in generale).
Quanto all'espressione della forza, essa si valuta indifferentemente dalla (2.13) o dalla
(2.20). Applicate rispettivamente alla (2.29) e alla (2.25) si hanno le espressioni equivalenti:
i
∂W ' (i , y )
∂ψ (i , y ) t
Fy =
dy =
di =
∂y
∂y
0
∫
ψ
Fy = −
ik
∑∫
k
∂W (ψ , y )
∂i (ψ , y ) t
=−
dψ = −
∂y
∂y
0
∫
0
∂ψ k (i1 ,.., i k ,.., i0 K , y )
di k
∂y
ψk
∑ ∫
k
0
∂i k (ψ 1 ,.., ψ k ,.., ψ 0 K , y )
dψ k
∂y
(2.31)
(2.32)
Si ricordi che queste relazioni valgono anche per le coppie meccaniche, basta considerare
uno spostamento angolare anziché uno spostamento lineare.
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
8 di 12
Nel caso di sistemi di induttori lineari, le (2.30) e (2.27) danno le espressioni equivalenti2:
dLkh ( y )
∂W ' (i , y ) 1 t dL( y )
1
= i
ik ih
i=
∂y
dy
2
2 k ,h dy
dΓkh ( y )
∂W (ψ , y )
dΓ ( y )
1
1
= − ψt
ψkψh
Fy = −
ψ=−
∂y
dy
2
2 k , h dy
∑
Fy =
∑
(2.33)
(2.34)
E' significativo il seguente bilancio di potenze per un sistema lineare nei legami flussicorrenti. La potenza meccanica si ottiene come prodotto della forza per la velocità:
dy
Pm ( t ) = Fy ( t )
(2.35)
dt
La derivata nel tempo dell'energia è, dalla (2.27):
dW
di 1 dL ( y ) dy
= i t L( y) + i t
i
(2.36)
dt
dt 2
dy
dt
in cui il primo termine è la variazione di energia dovuta alle correnti, il secondo è dovuto
alla variazione di geometria a parità di correnti.
La potenza elettrica entrante risulta, per la (2.7):
di
dL ( y ) dy
Pe ( t ) = v t i = i t v = i t L ( y ) + i t
i
(2.37)
dt
dy
dt
dW
La potenza elettrica soddisfa ovviamente il bilancio energetico Pe =
+ Pm . come si
dt
verifica dalle (2.33), (2.35), (2.36), (2.37) La potenza elettrica (2.37) risulta somma di due
termini: il primo, l'unico per geometria costante, corrisponde all'aumento di energia dovuto
alle sole variazioni delle correnti; il secondo è pari al doppio della potenza meccanica e, dal
confronto con le (2.33) e (2.36), contribuisce in parti uguali alla potenza meccanica uscente e
all'aumento di energia dovuto al movimento.
2.5 MODELLO DI SISTEMA A UN AVVOLGIMENTO
i
R
v
L
Fig. 2.3
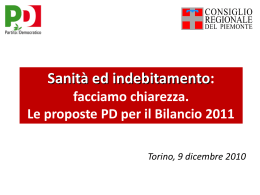
Si svilupperà il modello dinamico di un sistema elettromeccanico costituito da un induttore
variabile in funzione di una coordinata geometrica (vedi Fig. 2.3). Sia L(i, y) l'induttanza
apparente con saturazione ed R la resistenza dell'avvolgimento. y è la coordinata di posizione
di un elemento mobile di massa m e soggetto a una forza meccanica esterna Fm.
Sviluppiamo il sistema con la corrente come v. di s. elettrica. Il flusso concatenato è:
ψ = L (i , y )i
2
Le espressioni sono equivalenti, infatti: derivando ambo i membri di
unità) si ha
ψt
dL−1 ( y )
dL ( y ) −1
L ( y) + L( y)
= 0 , quindi
dy
dy
dΓ
dL−1
dL −1
dL
ψ = it L
Li = −i t
L Li = −i t
i.
dy
dy
dy
dy
L( y ) L−1 ( y ) = I (matrice
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
9 di 12
e derivando:
dψ
di ∂L ( i , y ) dy
∂L(i , y )
i
= Ld ( i , y ) +
con Ld (i , y ) = L(i , y ) +
i
dt
dt
dt
∂y
∂i
La eq. di maglia è
dψ
di ∂L ( i , y ) dy
i
v = Ri +
= Ri + Ld ( i , y ) +
dt
dt
∂y
dt
Dalla (2.31) la forza generata sull'elemento meccanico mobile è:
i
i
∂ψ(i, y )
∂L(i, y )
F (i, y ) = ∫
di = ∫
idi
∂y
∂y
0
0
Le v. di s. meccaniche sono la posizione y e la velocità y1. Il sistema è del terzo ordine. In
forma normale risulta costituito dalle seguenti tre equazioni differenziali:
∂L(i , y )
di
1
=
iy1
eq. di maglia
v − Ri −
∂y
dt Ld (i , y )
dy1 F ( i , y ) − Fm
=
legge della dinamica
dt
m
dy
legame tra posizione e velocità
= y1
dt
Gli ingressi del sistema sono la tensione esterna v e la forza resistente Fm.
Notare che nel sistema sono richieste le tre funzioni non lineari di due variabili:
∂L(i , y )
1
,
∂y
Ld ( i , y )
i
,
∂L(i , y )
idi
∂
y
0
∫
indipendenti tra loro e in genere di non facile determinazione.
Va considerato, a discussione del modello descritto, che la forza si è ottenuta
concettualmente dall'energia del sottosistema formato dall'induttore ideale e dallo
spostamento y (sistema conservativo per il quale esiste l'energia). Il risultato è stato poi
utilizzato per il modello completo (non conservativo), comprendente la resistenza
dell'avvolgimento e la dinamica delle parti in movimento.
Si consideri ora il flusso concatenato come v. di s. elettrica. Si deve innanzitutto esprimere
la corrente in funzione del flusso come:
ψ
i=
= Γ(ψ, y)ψ
L( ψ , y )
La equazione di maglia dà luogo alla equazione elettrica:
dψ
R
=v−
ψ = v − RΓ ( ψ , y ) ψ
dt
L( ψ , y)
che costituisce la prima eq. del sistema in forma normale. La forza va espressa in funzione
del flusso:
ψ
ψ
∂i ( ψ , y )
∂Γ ( ψ , y )
ψdψ
F (ψ , y) = − ∫
dψ = − ∫
∂
y
∂
y
0
0
Le equazioni meccaniche rimangono inalterate.
Il sistema con il flusso concatenato come v. di s. è più semplice del precedente, si
richiedono due sole funzioni non lineari (inoltre tali funzioni sono spesso più semplici da
determinarsi):
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
10 di 12
ψ
∂Γ(ψ, y )
Γ( ψ , y ) , ∫
ψ dψ
∂y
0
E' una caratteristica generale dei sistemi di induttori che i modelli sono più semplici se le
v. di s. elettriche sono i flussi concatenati invece delle correnti. L'inconveniente di tale scelta
risiede nell'eventuale connessione elettrica con la rete che risulta meno immediata.
Si consideri ora il caso particolare di induttore lineare.
Assunta la corrente come v. di s. elettrica, l'equazione elettrica e la forza si riducono a:
di
1
dL( y )
v − Ri −
iy1
=
dt L( y )
dy
1 dL ( y ) 2
F (i , y ) =
i
2 dy
In esse appaiono due funzioni (non lineari) nella sola variabile y:
1
dL ( y )
L( y )
dy
Con il flusso concatenato come v. di s. elettrica si ha:
R
dψ
=v−
ψ
L( y )
dt
F (ψ , y ) = −
,
1 d (1 / L( y ) ) 2 1 dL( y ) ψ 2
ψ =
2
dy
2 dy L2 ( y )
di complessità equivalente.
2.5.1 Esempio. Macchina a riluttanza.
Consideriamo la struttura di Fig. 2.5 formata da uno statore cilindrico ed un rotore
anisotropo all'interno dello statore. Sullo statore di materiale ferromagnetico è presente un
avvolgimento distribuito; in figura l'avvolgimento è schematizzato con un induttore in
posizione corrispondente all'asse magnetico dell'avvolgimento stesso. Il rotore è anch'esso
ferromagnetico. Sul rotore di momento di inerzia J agisce una coppia resistente esterna Cm.
L
L0
i
v
θ
0
0
π
θ
Fig. 2.6
C
ωm
2π
Γ
Γ0
Cm
0
0
π
Fig. 2.7
Fig. 2.5
θ
2π
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
11 di 12
La anisotropia provoca una accentuata variabilità dell'induttanza del circuito statorico con
la posizione angolare del rotore. Trascurata la saturazione, scelto il riferimento angolare come
in figura e data la simmetria del rotore, l'induttanza L(θ) presenta nell'angolo giro due
massimi uguali quando i poli rotorici sono allineati con l'asse magnetico di statore; due
minimi uguali nelle posizioni intermedie. La funzione L(θ) è pertanto periodica di periodo π
come in Fig. 2.6.
La forma effettiva della funzione dipende dai particolari costruttivi. La funzione periodica
si può approssimare con i primi termini dello sviluppo di Fourier come:
L( ϑ ) = L0 + L2 cos(2ϑ )
Consideriamo il modello nel flusso concatenato. Si necessita dell'induttanza inversa Γ(θ),
che ha un andamento qualitativamente simile alla L(θ) con massimi e minimi scambiati (Fig.
2.7). Considerando ancora i primi termini dello sviluppo di Fourier:
1
Γ(ϑ) =
= Γ0 − Γ2 cos( 2 ϑ )
1
1
L( ϑ)
Γ0 ≠
, Γ2 ≠
L0
L2
Si ha quindi la corrente:
i (t ) = Γ ( ϑ (t )) ψ (t )
l'equazione elettrica:
dψ ( t )
= v ( t ) − Ri ( t ) = v ( t ) − R Γ ( ϑ ( t )) ψ ( t )
dt
la coppia elettromagnetica accelerante:
1 dΓ(ϑ(t )) 2
Ce (t ) = −
ψ (t ) = −Γ2 sen(2ϑ(t ))ψ 2 (t )
2 dϑ
le equazioni del moto:
dϑ(t )
= ω m (t )
dt
dω m (t ) 1
= (C e (t ) − C m (t ) )
dt
J
Si osservi che la coppia tende ad allineare il rotore nella posizione di massima induttanza
(minima riluttanza). Il nome di macchina a riluttanza ha origine dal fatto che la coppia è
dovuta alla variazione della riluttanza del circuito magnetico con la posizione angolare del
rotore.
L'apparecchio mostrato può essere utilizzato come macchina elettrica rotante (usualmente
motore), se la coppia elettrica assume a regime un valore medio diverso da zero. Ciò si può
ottenere se il flusso concatenato è variabile nel tempo (si noti che se il flusso e la velocità
angolare sono costanti, la coppia generata è oscillante a valore medio nullo).
La macchina funziona effettivamente come motore continuativo se alimentato con tensione
alternata sinusoidale. Studiamo in questo caso il comportamento a regime.
Ammettiamo a regime velocità angolare ωm costante. Ciò è una approssimazione
accettabile se il momento di inerzia è sufficientemente elevato (l'approssimazione si può
verificare a posteriori). Dall'ipotesi segue (con opportuna origine dei tempi):
ϑ ( t ) = ω mt
Si ammetta ora il flusso concatenato sinusoidale nel tempo a pulsazione ω. Ciò si ottiene
con alimentazione sinusoidale se è trascurabile la caduta di tensione Ri. Poniamo
genericamente:
ψ ( t ) = 2Ψ cos( ωt − δ )
G. SUPERTI FURGA – MODELLISTICA DEI SISTEMI ELETTROMECCANICI – Marzo 2005
SISTEMI DI INDUTTORI
pag.
12 di 12
da cui
ψ 2 (t ) = Ψ 2 (1 + cos(2ωt − 2δ) )
Sostituendo le ipotesi fatte nella coppia si ottiene la funzione del tempo:
1
C e (t ) = − Γ2 Ψ 2 {sen[2(ωm − ω)t + 2δ] + sen[2(ωm + ω)t − 2δ] + 2 sen (2ωm t )}
2
L'espressione indica che per avere valore medio non nullo della coppia generata è
necessario che sia ωm=±ω. Questo fatto indica che la macchina è in grado di convertire
potenza media solo in condizione di sincronismo, in verso positivo o negativo, con la
frequenza di alimentazione. Con ωm=ω il valore medio della coppia vale:
1
C0 = − Γ2 Ψ 2 sen 2 δ
2
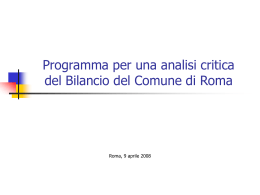
Il comportamento è simile a quello di un sincrono usuale ad eccitazione: l'ampiezza e il
segno della coppia media dipende dall'angolo δ (angolo di carico) tra il rotore e un riferimento
rotante sincrono con la pulsazione di rete. La caratteristica meccanica tra coppia media e
angolo è la seguente.
C
0
motore
0
generatore
−π
−π/2
0
π/2
δ
π
Fig. 2.8
Si può inoltre dimostrare che, in condizioni usuali, il tratto stabile della caratteristica è
compreso tra ±π / 4 .
Si osservi poi che la coppia presenta oscillazioni molto ampie intorno al proprio valore
medio. Ciò è una caratteristica negativa inevitabile di tale macchina ad un solo avvolgimento.
Infatti al sincronismo la coppia istantanea risulta:
1
C e (t ) = − Γ2 Ψ 2 [sen 2δ + 2 sen (2ωt ) + sen (4ωt − 2δ )]
2
Un'ultima osservazione riguarda il fatto che a flusso concatenato sinusoidale corrisponde
corrente non sinusoidale e viceversa, a causa della variabilità dell'induttanza inversa. Con
alimentazione sinusoidale è il flusso ad essere circa sinusoidale (per Ri trascurabile) mentre
non lo è la corrente, in quanto nell'equazione elettrica appaiono termini fortemente
distorcenti. (vedi la Fig. 2.6)). Ciò giustifica l'assunto per l'analisi a regime e fa intuire la
maggiore complessità del modello considerando la corrente come variabile di stato.
Scarica